文章
Communicated by Tilo Schwalger
Inference of a Mesoscopic Population Model
from Population Spike Trains
Alexandre René
arene010@uottawa.ca
Department of Physics, 渥太华大学, 渥太华 K1N 6N5, 加拿大; Max
Planck Research Group Neural Systems Analysis, Center of Advanced European
Studies and Research (caesar), Bonn 53175, 德国; and Institute of Neuroscience
and Medicine (INM-6) and Institute for Advanced Simulation (IAS-6) 和
JARA-Institute Brain Structure-Function Relationships (INM-10), Jülich Research
Centre, Jülich 52425, 德国
André Longtin
alongtin@uottawa.ca
Department of Physics, 渥太华大学, 渥太华 K1N 6N5, 加拿大, and Brain
and Mind Research Institute, 渥太华大学, Ottawa K1H 8M5, 加拿大
Jakob H. Macke
macke@tum.de
马克斯·普朗克研究小组神经系统分析, Center of Advanced European
Studies and Research (caesar), Bonn 53175, 德国, and Computational
Neuroengineering, 电气与计算机工程系, Technical
University of Munich, 慕尼黑 80333, 德国
Understanding how rich dynamics emerge in neural populations re-
quires models exhibiting a wide range of behaviors while remaining
interpretable in terms of connectivity and single-neuron dynamics. 如何-
曾经, it has been challenging to fit such mechanistic spiking networks at
the single-neuron scale to empirical population data. To close this gap,
we propose to fit such data at a mesoscale, using a mechanistic but low-
dimensional and, 因此, statistically tractable model. The mesoscopic
representation is obtained by approximating a population of neurons
as multiple homogeneous pools of neurons and modeling the dynamics
of the aggregate population activity within each pool. We derive the
likelihood of both single-neuron and connectivity parameters given this
活动, which can then be used to optimize parameters by gradient as-
cent on the log likelihood or perform Bayesian inference using Markov
chain Monte Carlo (MCMC) sampling. We illustrate this approach
using a model of generalized integrate-and-fire neurons for which
mesoscopic dynamics have been previously derived and show that both
single-neuron and connectivity parameters can be recovered from
神经计算 32, 1448–1498 (2020) © 2020 麻省理工学院
https://doi.org/10.1162/neco_a_01292
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
e
d
你
n
e
C
哦
A
r
t
我
C
e
–
p
d
/
我
F
/
/
/
/
3
2
8
1
4
4
8
1
8
6
5
0
4
3
n
e
C
哦
_
A
_
0
1
2
9
2
p
d
.
/
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
Inference of a Mesoscopic Population Model
1449
simulated data. 尤其, our inference method extracts posterior
correlations between model parameters, which define parameter subsets
able to reproduce the data. We compute the Bayesian posterior for com-
binations of parameters using MCMC sampling and investigate how the
approximations inherent in a mesoscopic population model affect the
accuracy of the inferred single-neuron parameters.
1 介绍
Neuron populations produce a wide array of complex collective dynam-
集成电路. Explaining how these emerge requires a mathematical model that not
only embodies the network interactions but is also parameterized in terms
of interpretable neuron properties. Just as crucial, in order to draw data-
supported conclusions, we also need to be able to infer those parameters
from empirical observations. These requirements tend to involve a trade-
off between model expressiveness and tractability. Low-dimensional state-
space models (Macke et al., 2011; Pandarinath et al., 2018; Pillow et al., 2008;
赵 & 公园, 2016) are simple enough to allow for inference but achieve
that simplicity by focusing on phenomenology: any mechanistic link to the
individual neurons is ignored. 反过来, microscopic mechanistic mod-
els with thousands of simulated neurons do provide that link between pa-
rameters and output (Hawrylycz et al., 2016; Potjans & Diesmann, 2014);
然而, this complexity makes the analysis difficult and is limited to net-
works with highly simplified architectures (Doiron, Litwin-Kumar, 罗森-
baum, Ocker, & Josic, 2016; Martí, Brunel, & Ostojic, 2018). Since methods to
fit these models to experimental data are limited to single neurons (Mensi
等人。, 2012), it is also unclear how to set their parameters such that they
capture the dynamics of large, heterogeneous neural populations.
To reduce the problem to a manageable size and scale, one can con-
sider models that provide a mesoscopic dynamical description founded
on microscopic single-neuron dynamics (杜蒙, Payeur, & Longtin, 2017;
Nykamp & Tranchina, 2000; 华莱士, Benayoun, van Drongelen, & 考恩,
2011). 具体来说, we will focus on the model described in Schwalger,
Deger, and Gerstner (2017), where neurons are grouped into putative ex-
citatory (乙) and inhibitory (我) populations in a cortical column. The key ap-
proximation is to replace each population with another of equal size but
composed of identical neurons, resulting in an effective mesoscopic model
of homogeneous populations. In contrast with previous work on popula-
tion rate dynamics (Gerstner, 2000; Nykamp & Tranchina, 2000; Wilson &
考恩, 1972), Schwalger et al. (2017) correct their mean-field approxima-
tions for the finite size of populations. They are thus able to provide stochas-
tic equations for the firing rate of each population with explicit dependence
on the population sizes, neuron parameters, and connectivities between
人口 (see Figure 1A, 顶部). We use these equations to fit the model
to traces of population activity.
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
e
d
你
n
e
C
哦
A
r
t
我
C
e
–
p
d
/
我
F
/
/
/
/
3
2
8
1
4
4
8
1
8
6
5
0
4
3
n
e
C
哦
_
A
_
0
1
2
9
2
p
d
.
/
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
1450
A. René, A. Longtin, 和 J. Macke
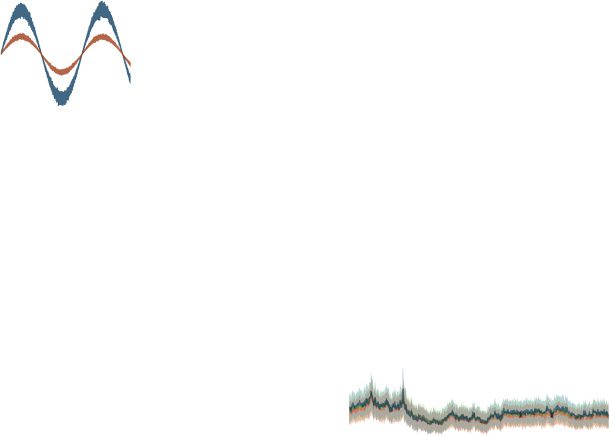
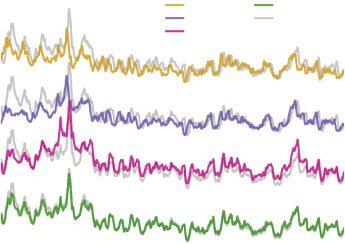
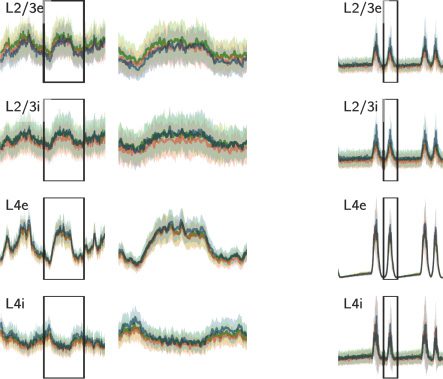
数字 1: (A) General procedure to infer parameters of a mesoscopic popula-
tion model from microscopic data. A microscopic model of GIF neurons is used
to generate spike trains, which are averaged to obtain traces of population ac-
活力; these traces constitute our data. A mesoscopic model of either two or four
populations is then fit to these traces. Simulating the mesoscopic model with the
inferred parameters allows us to evaluate how well it reproduces the true dy-
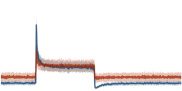
namics. (乙) For heterogeneous systems, average parameters might not predict
mean activity. Mean activity (线) and its standard deviation (shaded area) 为了
a heterogeneous microscopic model (左边) and mesoscopic models attempting to
approximate it (中间, 正确的). A mesoscopic model constructed by averaging
parameters across the microscopic population overestimates the population’s
variability (中间). Inferred parameters in this case deviate from these aver-
ages and provide a better representation of the true activity (正确的). Models are
as in Figure 5; traces are for the inhibitory population. Means and standard de-
viations are computed from 50 realizations and averaged over disjoint bins of
10 多发性硬化症.
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
e
d
你
n
e
C
哦
A
r
t
我
C
e
–
p
d
/
我
F
/
/
/
/
3
2
8
1
4
4
8
1
8
6
5
0
4
3
n
e
C
哦
_
A
_
0
1
2
9
2
p
d
.
/
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
Directly inferring mesoscopic model parameters has a number of ad-
vantages compared to extrapolating from those obtained by fitting a mi-
croscopic model. 对于一个, it allows the use of data that do not have single-
neuron resolution. 此外, since neuron parameters in a mesoscopic
model represent a whole population, there may not be a clear way to re-
late micro- and mesoscopic parameters if the former are heterogeneous. 经过
inferring population parameters from population recordings, we target the
values that best compensate for the mismatch between the data and the ide-
alized mesoscopic model (see Figure 1B).
The method we present assumes that the model to be inferred can be
expressed as a set of stochastic equations and that we have access to time
series for both the observed (and possibly aggregated) neural activities and
external input. It is thus not limited to mesoscale models and could also be
applied to, 说, Hodgkin Huxley-type neurons in isolation or networks.
尽管如此, in this article, the underlying microscopic model does make
the inferred parameters more readily interpretable and provides a good
idea of what values an inference algorithm should find for the parameters.
Inference of a Mesoscopic Population Model
1451
Methods have recently been developed for inferring models where
stochastic equations are treated as a black box simulator (Greenberg, Non-
nenmacher, & Macke, 2019; Lueckmann et al., 2017; Papamakarios & 穆尔-
ray, 2016; Papamakarios, Sterratt, & 穆雷, 2018). 在这种情况下, one does
not have access to the internal variables of the model and thus cannot com-
pute the likelihood of its parameters; 反而, these methods make use of
repeated simulations to find suitable parameters. While this makes them
applicable to a wide range of models, the repeated simulations can make
them computationally expensive and best suited to optimizing a set of sta-
tistical features rather than full-time traces. 而且, for the models of
interest here, the likelihood can be derived from the stochastic evolution
方程.
We show in this work that the likelihood can indeed be used to
infer model parameters using non-convex optimization. The resulting
optimization problem shares many similarities with training recurrent
神经网络 (RNNs) popular in machine learning (好人, 本吉奥,
& 考维尔, 2016; Waibel, Hanazawa, 欣顿, Shikano, & Lang, 1989) 和
allows us to leverage optimization tools from that field. 然而, RNNs in
machine learning are typically based on generic, nonmechanistic models,
which implies that interpretation of the resulting network can be challeng-
英 (but see work on RNN visualization by Barak et al. (Barak, 2017; Haviv,
Rivkind, & Barak, 2019; Sussillo & Barak, 2012). 因此, our approach can be
regarded as complementary to RNN approaches, as we directly fit a mech-
anistically interpretable model.
This article is organized as follows. In sections 2.1 和 2.2, we estab-
lish that maximum likelihood inference for our chosen mesoscopic model
is sound, and in section 2.3 we provide empirical estimates for the amount
of data this procedure requires. Using the example of heterogeneous popu-
lations, 部分 2.4 then shows how inference can find effective parameters,
which compensate for the mismatch between data and model. In section
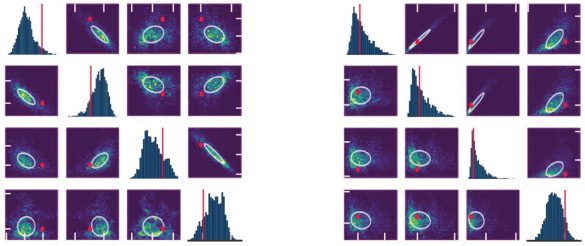
2.5 we identify codependence between multiple model parameters by re-
covering the full Bayesian posterior. 最后, 部分 2.6 demonstrates that
the approach scales well by considering a more challenging four-population
model with 36 free parameters. 部分 3 discusses our results, with an em-
phasis on circumscribing the class of models amenable to our approach.
Method details are provided in section 4, along with technical insights
gained as we adapted likelihood inference to a detailed dynamical model.
Additional details, including a full specification of parameter values used
throughout the article, are given in appendixes A to I.
2 结果
2.1 Model Summary. We studied the pair of microscopic and meso-
scopic models presented in Schwalger et al. (2017), which is designed to
represent excitatory (乙) and inhibitory (我) populations of a putative cortical
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
e
d
你
n
e
C
哦
A
r
t
我
C
e
–
p
d
/
我
F
/
/
/
/
3
2
8
1
4
4
8
1
8
6
5
0
4
3
n
e
C
哦
_
A
_
0
1
2
9
2
p
d
.
/
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
1452
A. René, A. Longtin, 和 J. Macke
column of four neural layers (Potjans & Diesmann, 2014). 对于本研究,
we considered only layers 2/3 和 4 and made minor parameter adjust-
ments to maintain realistic firing rates (see appendix A). We also reduced
all population sizes by a factor of 50 to ease the simulation of the micro-
scopic model. This increases the variance of population activities and so
does not artificially simplify the task of inferring mesoscopic parameters.
The microscopic model is composed of either two or four populations of
generalized integrate-and-fire (GIF) 神经元. Neurons are randomly con-
nected, with connectivity probabilities depending on the populations. 这
combination of excitatory and inhibitory input, along with internal adap-
tation dynamics, produces for each neuron i a time-dependent firing rate
λ
我(t|Ht ); this rate is conditioned on the spike history up to t, denoted Ht (为了
方程, 参见部分 4.1). Whether that neuron spikes within a time win-
dow [t, t + (西德:3)t) is then determined by sampling a Bernoulli random variable
(Schwalger et al., 2017),
si(t|Ht ) ∼ Bernoulli(λ
我(t|Ht )(西德:3)t),
(2.1)
我(t|Ht )(西德:3)t (西德:3) 1 is always true; we later refer
在哪里 (西德:3)t is chosen such that λ
to this stochastic process as escape noise. If all parameters are shared across
all neurons within each population, we call this a homogeneous microscopic
模型. 反过来, we call a model heterogeneous if at least one parameter is
unique to each neuron. We denote Iα the set of indices for neurons belong-
ing to a population α.
The expected activity aα of a population α is the normalized expected num-
ber of spikes,
aα (t|Ht ) = 1
Nα
(西德:2)
i∈Iα
我(t|Ht ),
λ
(2.2)
which is a deterministic variable once we know the history up to t. 在骗子-
特拉斯特, the activity Aα of that population is a random variable corresponding
to the number of spikes actually observed:
Aα (t|Ht ) := 1
Nα
(西德:2)
i∈Iα
si(t|Ht ).
(2.3)
These variable definitions are summarized in Table 1.
在实践中, data are discretized into discrete time steps {tk
}L
k=1, 我们
assume to have uniform lengths (西德:3)t and to be short enough for spike events
of different neurons to be independent within one time step (this condition
is always fulfilled when the time step is less than the synaptic transmission
delay). Under these assumptions, 方程 2.3 can be approximated by a
binomial distribution (Schwalger et al., 2017),
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
e
d
你
n
e
C
哦
A
r
t
我
C
e
–
p
d
/
我
F
/
/
/
/
3
2
8
1
4
4
8
1
8
6
5
0
4
3
n
e
C
哦
_
A
_
0
1
2
9
2
p
d
.
/
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
Inference of a Mesoscopic Population Model
1453
桌子 1: Key Variable Definitions.
Variable Definition
Nα
中号
L
(西德:3)t
Iα
si(t)
Aα (t)
aα (t)
Number of neurons in population α
Number of populations, α = 1, . . . , 中号
Number of time steps used to compute the likelihood
Time step
Set of indices of neurons belonging to population α
1 if neuron i spiked within time window [t, t + (西德:3)t), 0 否则
Activity in population α averaged over time window [t, t + (西德:3)t)
Expectation of A(t) conditioned on {A(t
)}
(西德:5)
t(西德:5)