Review of Neural Networks for Speech Recognition
Richard P. Lippmann*
MIT Lincoln Laboratory, Lexington, MA 021 73, USA
The performance of current speech recogition systems is far below
that of humans. Neural nets offer the potential of providing massive
parallelism, adaptation, and new algorithmic approaches to problems
in speech recognition. Initial studies have demonstrated that multi-
layer networks with time delays can provide excellent discrimination
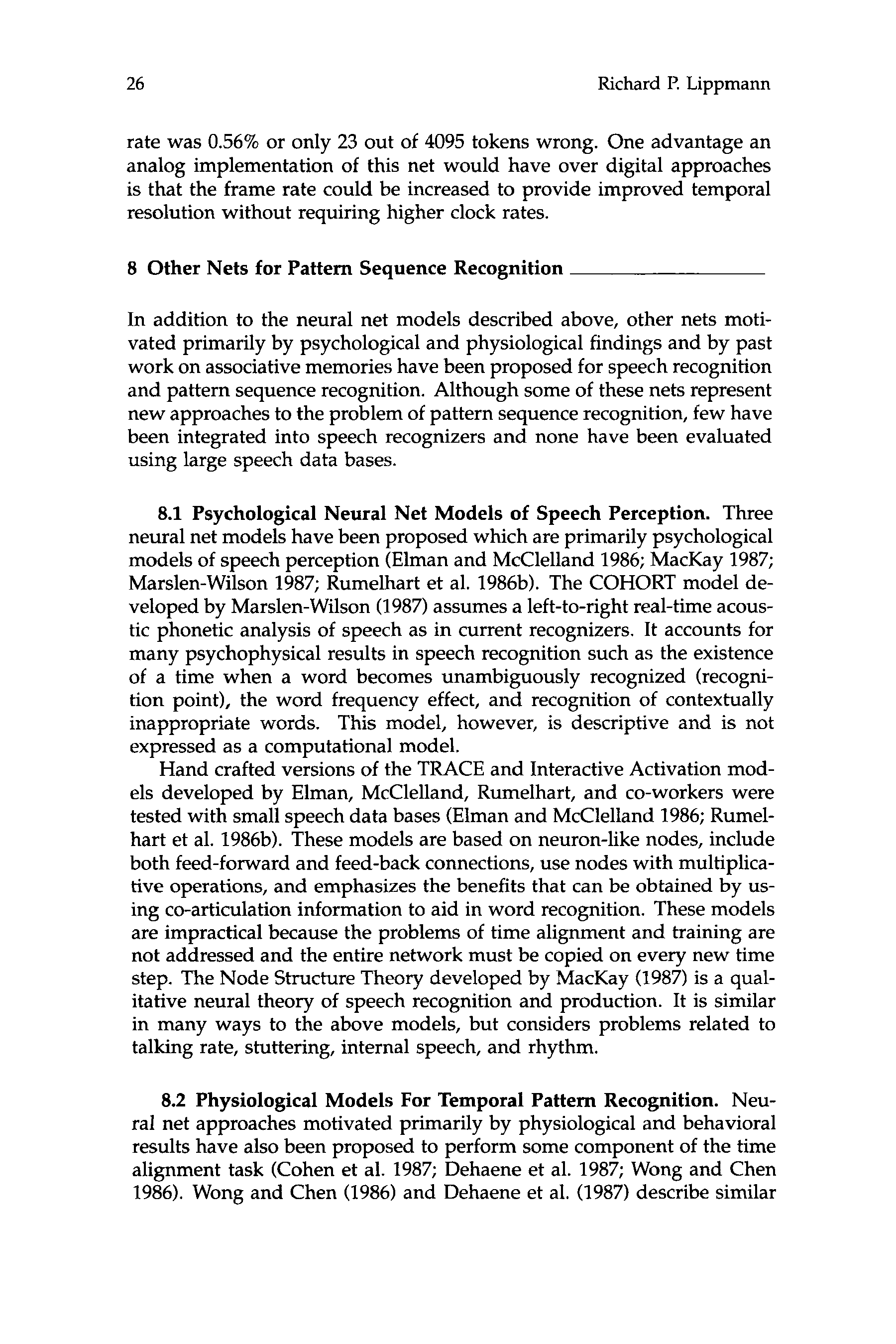
between small sets of pre-segmented difficult-to-discriminate words,
consonants, and vowels. Performance for these small vocabularies has
often exceeded that of more conventional approaches. Physiological
front ends have provided improved recognition accuracy in noise and
a cochlea filter-bank that could be used in these front ends has been
implemented using micro-power analog VLSI techniques. Techniques
have been developed to scale networks up in size to handle larger
vocabularies, to reduce training time, and to train nets with recurrent
connections. Multilayer perceptron classifiers are being integrated into
conventional continuous-speech recognizers. Neural net architectures
have been developed to perform the computations required by vec-
tor quantizers, static pattern classifiers, and the Viterbi decoding al-
gorithm. Further work is necessary for large-vocabulary continuous-
speech problems, to develop training algorithms that progressively
build internal word models, and to develop compact VLSI neural net
hardware.
1 State of the Art for Speech Recognition
Speech is the most natural form of human communication. Compact
implementations of accurate, real-time speech recognizers would find
widespread use in many applications including automatic transcription,
simplified man-machine communication, and aids for the hearing im-
paired and physically disabled. Unfortunately, current speech recogniz-
ers perform poorly on talker-independent continuous-speech recognition
tasks that people perform without apparent difficulty. Although children
learn to understand speech with little explicit supervision and adults take
speech recognition ability for granted, it has proved to be a difficult task
‘This work was sponsored by the Department of the Air Force. The views expressed
are those of the author and do not reflect the official policy or position of the U.S.
Government.
Neural Computation 1, 1-38 (1989) @ 1989 Massachusetts Institute of Technology
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
2
Richard P. Lippmann
to duplicate with machines. As noted by Klatt (1986), this is due to
variability and overlap of information in the acoustic signal, to the need
for high computation rates (a human-like system must match inputs to
50,000 words in real time), to the multiplicity of analyses that must be
performed (phonetic, phonemic, syntactic, semantic, and pragmatic), and
to the lack of any comprehensive theory of speech recognition.
The best existing speech recognizers perform well only in artificially
constrained tasks. Performance is generally better when training data is
provided for each talker, when words are spoken in isolation, when the
vocabulary size is small, and when restrictive language models are used
to constrain allowable word sequences. For example, talker-dependent
isolated-word recognizers can be trained to recognize 105 words with 99%
accuracy (Paul 1987). Large-vocabulary talker-dependent word recogni-
tion accuracy with sentence context can be as high as 95% for 20,000
words from sentences in office memos spoken with pauses between
words (Averbuch et al. 1987).
Accuracy for a difficult 997-word talker-independent continuous-
speech task using a strong language model (an average of only 20 dif-
ferent words possible after any other word) can be as high as 96% (Lee
and Hon 1988). This word accuracy score translates to an unacceptable
sentence accuracy of roughly 50%. In addition, the word accuracy of
this high-performance recognizer when tested with no grammar model is
typically below 70% correct. Results such as these illustrate the poor low-
level acoustic-phonetic matching provided by current recognizers. These
recognizers depend heavily on constraining grammars to achieve good
performance. Humans do not suffer from this problem. We can recognize
clearly spoken but contextually inappropriate words in anomalous sen-
tences such as “John drank the guitar” almost perfectly (Marslen-Wilson
1987).
The current best performing speech recognition algorithms use Hid-
den Markov Model (HMM) techniques. Good introductions to these tech-
niques and to digital signal processing of speech are available in (Lee and
Hon 1988; Parsons 1986; Rabiner and Juang 1986; Rabiner and Schafer
1978). The HMM approach provides a framework which includes an ef-
ficient decoding algorithm for use in recognition (the Viterbi algorithm)
and an automatic supervised training algorithm (the forward-backward
algorithm). New neural-net approaches to speech recognition must have
the potential to overcome the limitations of current HMM systems. These
limitations include poor low-level and poor high-level modeling. Poor
low-level acoustic-phonetic modeling leads to confusions between acous-
tically similar words while poor high-level speech understanding or se-
mantic modeling restricts applications to simple situations where finite
state or probabilistic grammars are acceptable. In addition, the first-order
Markov assumption makes it difficult to model coarticulation directly
and HMM training algorithms can not currently learn the topological
structure of word and sub-word models. Finally, HMM theory does not
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
3
WORD MODELS
(Patterns and Sequences)
SPEECH
INPUT
SIGNAL
PATTERN
MATCHING
AND
-b
TIME
SELECTED
WORD
PATTERN
SEQUENCE
CLASSIFICATION
SPECTRAL
PATTERNS
(1 00 per Second)
W ~ R D
SCORES
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
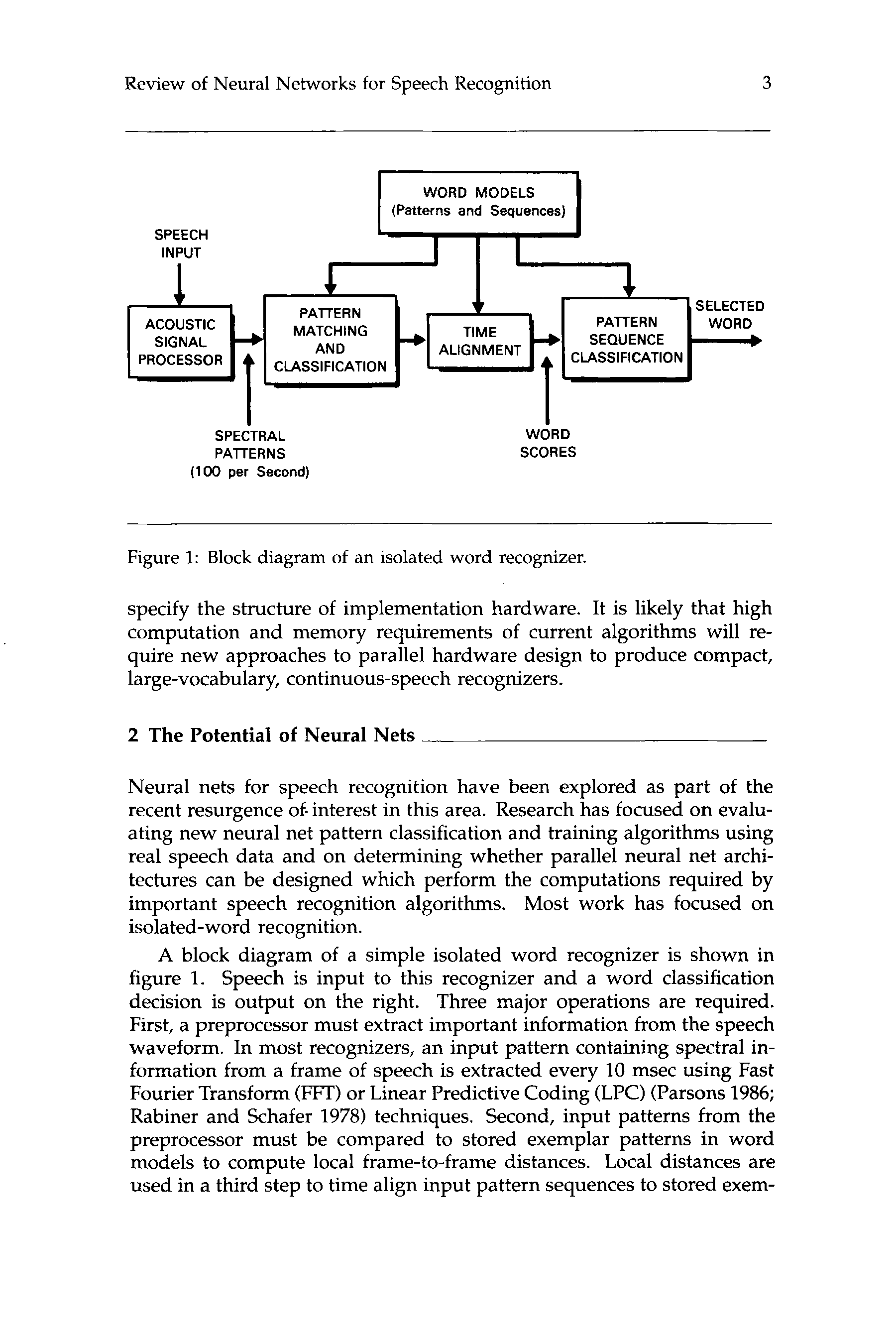
Figure 1: Block diagram of an isolated word recognizer.
specify the structure of implementation hardware. It is likely that high
computation and memory requirements of current algorithms will re-
quire new approaches to parallel hardware design to produce compact,
large-vocabulary, continuous-speech recognizers.
2 The Potential of Neural Nets
Neural nets for speech recognition have been explored as part of the
recent resurgence of. interest in this area. Research has focused on evalu-
ating new neural net pattern classification and training algorithms using
real speech data and on determining whether parallel neural net archi-
tectures can be designed which perform the computations required by
important speech recognition algorithms. Most work has focused on
isolated-word recognition.
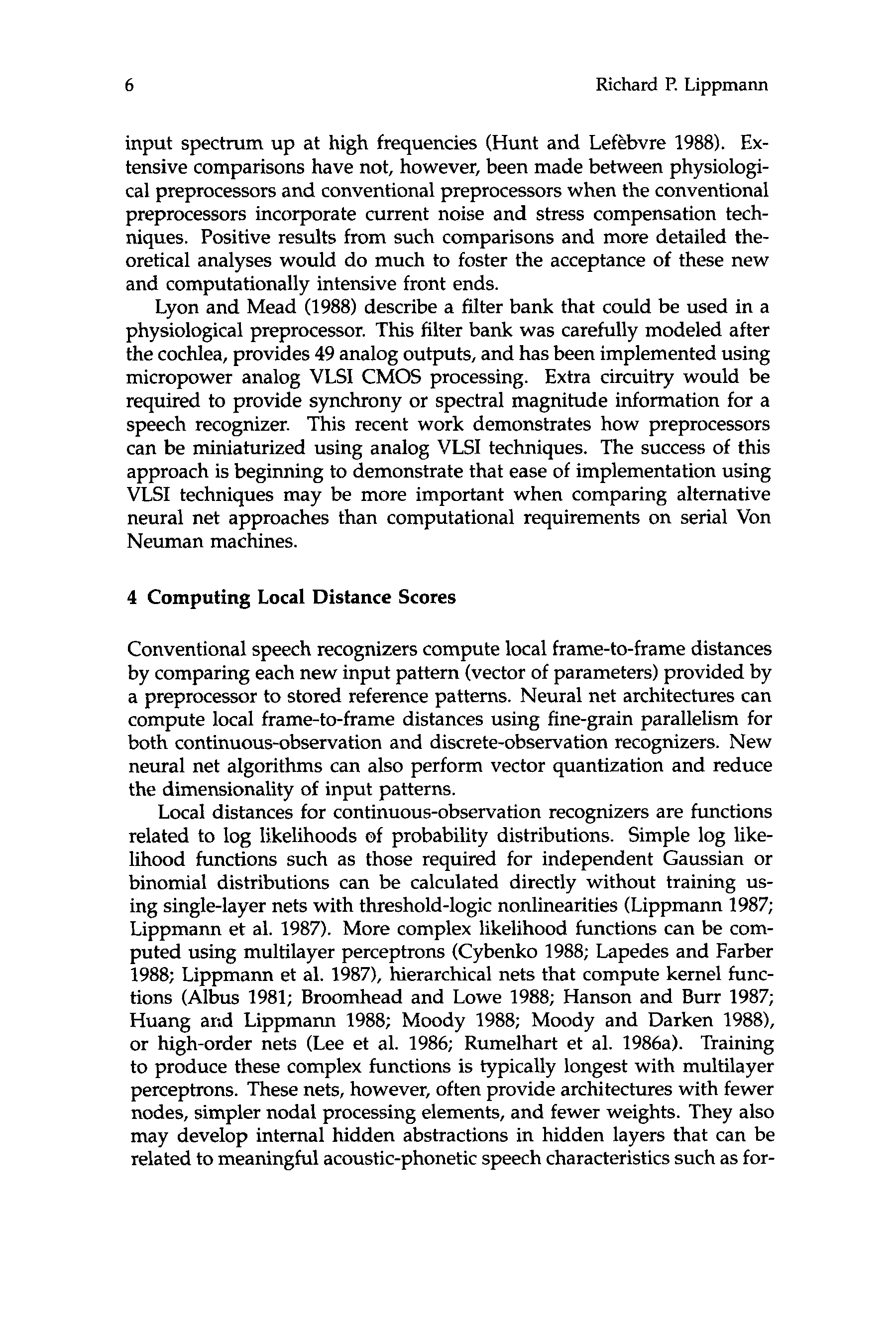
A block diagram of a simple isolated word recognizer is shown in
figure 1. Speech is input to this recognizer and a word classification
decision is output on the right. Three major operations are required.
First, a preprocessor must extract important information from the speech
waveform. In most recognizers, an input pattern containing spectral in-
formation from a frame of speech is extracted every 10 msec using Fast
Fourier Transform (FFT) or Linear Predictive Coding (LPC) (Parsons 1986;
Rabiner and Schafer 1978) techniques. Second, input patterns from the
preprocessor must be compared to stored exemplar patterns in word
models to compute local frame-to-frame distances. Local distances are
used in a third step to time align input pattern sequences to stored exem-
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
4
Richard P. Lippmann
plar pattern sequences that form word models and arrive at whole-word
matching scores. Time alignment compensates for variations in talking
rate and pronunciation. Once these operations have been performed,
the selected word to output is that word with the highest whole-word
matching score.
This paper reviews research on complete neural net recognizers and
on neural nets that perform the above three operations. Auditory pre-
processors that attempt to mimic cochlea and auditory nerve processing
are first reviewed. Neural net structures that can compute local distance
scores are then described. Classification results obtained using static
speech patterns as inputs are then followed by results obtained with dy-
namic nets that allow continuous-time inputs. Techniques to integrate
neural net and conventional approaches are then described followed by
a brief review of psychological and physiological models of temporal
pattern sequence recognition. The paper ends with a summary and sug-
gestions for future research. Emphasis throughout is placed on studies
that used large public-domain speech data bases or that first presented
new approaches.
3 Auditory Preprocessors
A preprocessor extracts important parameters from the speech wave-
form to compress the amount of data that must be processed at higher
levels and provide some invariance to changes in noise, talkers, and the
acoustic environment. Most conventional preprocessors are only loosely
modeled on the cochlea and perform simple types of filtering and data
compression motivated by Fourier analysis and information theory. Re-
cent physiological studies of cochlea and auditory nerve responses to
complex stimuli have led to more complex physiological preprocessors
designed to closely mimic many aspects of auditory nerve response char-
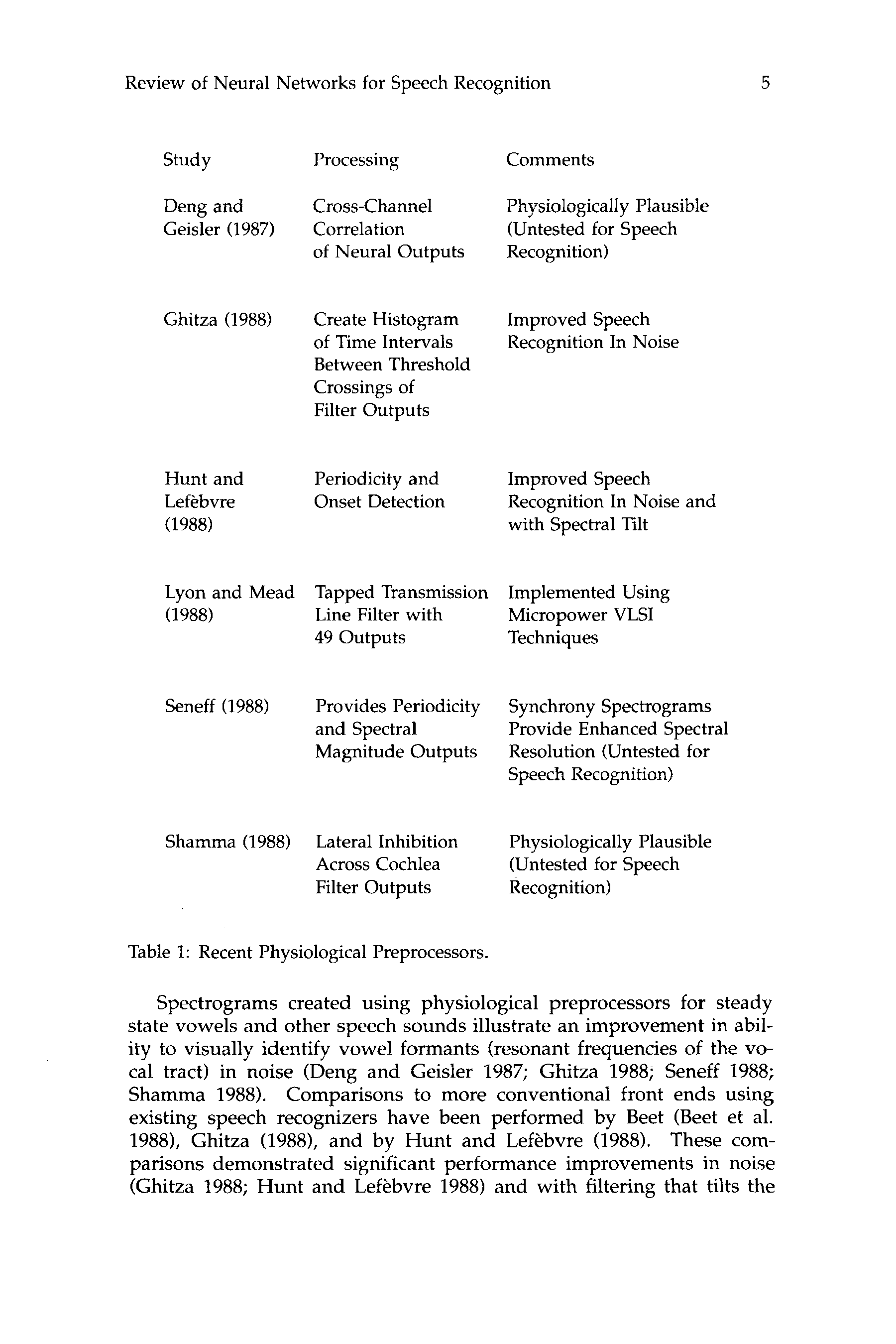
acteristics. Five of these preprocessors and the VLSI cochlea filter listed
in table 1 are reviewed in this section. Good reviews of many of these
preprocessors and of response properties of the cochlea and auditory
nerve can be found in (Greenberg 1988a; 1988b).
The five preprocessors in table 1 rely on periodicity or synchrony in-
formation in filter-bank outputs. Synchrony information is related to the
short-term phase of a speech signal and can be obtained from the arrival
times of nerve spikes on the auditory nerve. It could increase recognition
performance by supplementing the spectral magnitude information used
in current recognizers. Synchrony information is typically obtained by
filtering the speech input using sharp bandpass filters with characteristics
similar to those of the mechanical filters in the cochlea. The resulting fil-
tered waveforms are then processed using various types of time domain
analyses that could be performed using analog neural net circuitry.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
5
Study
Processing
Comments
Deng and
Geisler (1987)
Cross-Channel
Correlation
of Neural Outputs
Physiologically Plausible
(Untested for Speech
Recognition)
Ghitza (1988)
Create Histogram
of Time Intervals
Between Threshold
Crossings of
Filter Outputs
Improved Speech
Recognition In Noise
Hunt and
Lefebvre
(1988)
Periodicity and
Onset Detection
Improved Speech
Recognition In Noise and
with Spectral Tilt
Lyon and Mead
(1988)
Tapped Transmission
Line Filter with
49 outputs
Implemented Using
Micropower VLSI
Techniques
Seneff (1988)
Provides Periodicity
and Spectral
Magnitude Outputs
Synchrony Spectrograms
Provide Enhanced Spectral
Resolution (Untested for
Speech Recognition)
Sharnrna (1988)
Lateral Inhibition
Across Cochlea
Filter Outputs
Physiologically Plausible
(Untested for Speech
Recognition)
Table 1: Recent Physiological Preprocessors.
Spectrograms created using physiological preprocessors for steady
state vowels and other speech sounds illustrate a n improvement in abil-
ity to visually identify vowel formants (resonant frequencies of the vo-
cal tract) in noise (Deng and Geisler 1987; Ghitza 1988; Seneff 1988;
Shamma 1988). Comparisons to more conventional front ends using
existing speech recognizers have been performed by Beet (Beet et al.
19881, Ghitza (19881, and by Hunt and Lefebvre (1988). These com-
parisons demonstrated significant performance improvements in noise
(Ghitza 1988; Hunt and Lefebvre 1988) and with filtering that tilts the
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
6
Richard P. Lippmann
input spectrum up at high frequencies (Hunt and Lefsbvre 1988). Ex-
tensive comparisons have not, however, been made between physiologi-
cal preprocessors and conventional preprocessors when the conventional
preprocessors incorporate current noise and stress compensation tech-
niques. Positive results from such comparisons and more detailed the-
oretical analyses would do much to foster the acceptance of these new
and computationally intensive front ends.
Lyon and Mead (1988) describe a filter bank that could be used in a
physiological preprocessor. This filter bank was carefully modeled after
the cochlea, provides 49 analog outputs, and has been implemented using
micropower analog VLSI CMOS processing. Extra circuitry would be
required to provide synchrony or spectral magnitude information for a
speech recognizer. This recent work demonstrates how preprocessors
can be miniaturized using analog VLSI techniques. The success of this
approach is beginning to demonstrate that ease of implementation using
VLSI techniques may be more important when comparing alternative
neural net approaches than computational requirements on serial Von
Neuman machines.
4 Computing Local Distance Scores
Conventional speech recognizers compute local frame-to-frame distances
by comparing each new input pattern (vector of parameters) provided by
a preprocessor to stored reference patterns. Neural net architectures can
compute local frame-to-frame distances using fine-grain parallelism for
both continuous-observation and discrete-observation recognizers. New
neural net algorithms can also perform vector quantization and reduce
the dimensionality of input patterns.
Local distances for continuous-observation recognizers are functions
related to log likelihoods of probability distributions. Simple log like-
lihood functions such as those required for independent Gaussian or
binomial distributions can be calculated directly without training us-
ing single-layer nets with threshold-logic nonlinearities (Lippmann 1987;
Lippmann et al. 1987). More complex likelihood functions can be com-
puted using multilayer perceptrons (Cybenko 1988; Lapedes and Farber
1988; Lippmann et al. 1987), hierarchical nets that compute kernel func-
tions (Albus 1981; Broomhead and Lowe 1988; Hanson and Burr 1987;
Huang acd Lippmann 1988; Moody 1988; Moody and Darken 1988),
or high-order nets (Lee et al. 1986; Rumelhart et al. 1986a). Training
to produce these complex functions is typically longest with multilayer
perceptrons. These nets, however, often provide architectures with fewer
nodes, simpler nodal processing elements, and fewer weights. They also
may develop internal hidden abstractions in hidden layers that can be
related to meaningful acoustic-phonetic speech characteristics such as for-
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
7
mant transitions and that also could be applied to many different speech
recognition tasks.
Discrete-observation recognizers first perform vector quantization and
label each input with one particular symbol. Symbols are used to calcu-
late local distances via look-up tables that contain symbol probabilities for
each reference pattern. The look-up table calculation can be performed
by simple single-layer perceptrons. The perceptron for any reference
pattern must have as many inputs as there are symbols. Weights must
equal symbol probabilities and all inputs must be equal to zero except
for that corresponding to the current input symbol. Alternatively, a mul-
tilayer perceptron could be used to store probabilities for symbols that
have been seen and interpolate between these probabilities for unseen
symbols. The vector quantization operation can be performed using an
architecture similar to that used by Kohonen’s feature-map net (Kohonen
1984). Inputs to the feature-map net feed an array of codebook nodes
containing one node for each symbol. Components of the Euclidean dis-
tance between the input and the reference pattern represented by weights
to each node are computed in each node. The codebook node with the
smallest Euclidean distance to the input is selected using lateral inhibi-
tion or other maximum-picking techniques (Lippmann et al. 1987). This
process guarantees that only one node with the minimum Euclidean dis-
tance to the input has a unity output as required. Weights used in this
architecture can be calculated using the feature-map algorithm or any
other standard vector quantization algorithm based on Euclidean dis-
tances such as k-means clustering (Duda and Hart 1973).
Kohonen’s feature-map vector quantizer is an alternative sequentially-
trained neural net algorithm. It has been tested successfully in an exper-
imental speech recognizer (Kohonen 1988; Kohonen et al. 1984) but not
evaluated with a large public speech data base. A version with a small
number of nodes but including training logic has been implemented in
VLSI (Mann et al. 1988). Experiments with a discrete-observation HMM
recognizer (Mann et al. 1988) and with a template-based recognizer (Nay-
lor and Li 1988) demonstrated that this algorithm provides performance
similar to that provided by conventional clustering procedures such as
k-means clustering (Duda and Hart 1973). The feature-map algorithm
incrementally trains weights to a two-dimensional grid of nodes such
that after training, nodes that are physically close in the grid correspond
to input patterns that are close in Euclidean distance. One advantage of
this topological organization is that averaging outputs of nodes that are
physically close using nodes at higher levels corresponds to a probabil-
ity smoothing technique often used in speech recognizers called Parzen
smoothing (Duda and Hart 1973). This averaging can be performed by
nodes with limited fan-in and short connections.
The auto-associative multilayer perceptron (Elman and Zipser 1987;
Hinton 1987) is a neural net algorithm that reduces the dimensionality
of continuous-valued inputs. It is a multilayer perceptron with the same
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
8
Richard P. Lippmann
number of input and output nodes and one or more layers of hidden
nodes. This net is trained to reproduce the input at the output nodes
through a small layer of hidden nodes. Outputs of hidden nodes after
training can be used as reduced dimensional inputs for speech processing
as described in (Elman and Zipser 1987; Fallside et al. 1988). Recent
theoretical analyses have demonstrated that auto-associative networks
are closedly related to a standard statistical technique called principal
components analysis (Baldi and Hornik 1989; Bourlard and Kamp 1988).
Auto-associative nets are thus not a new analytical tool but instead a
technique to perform the processing required by principal components
analysis.
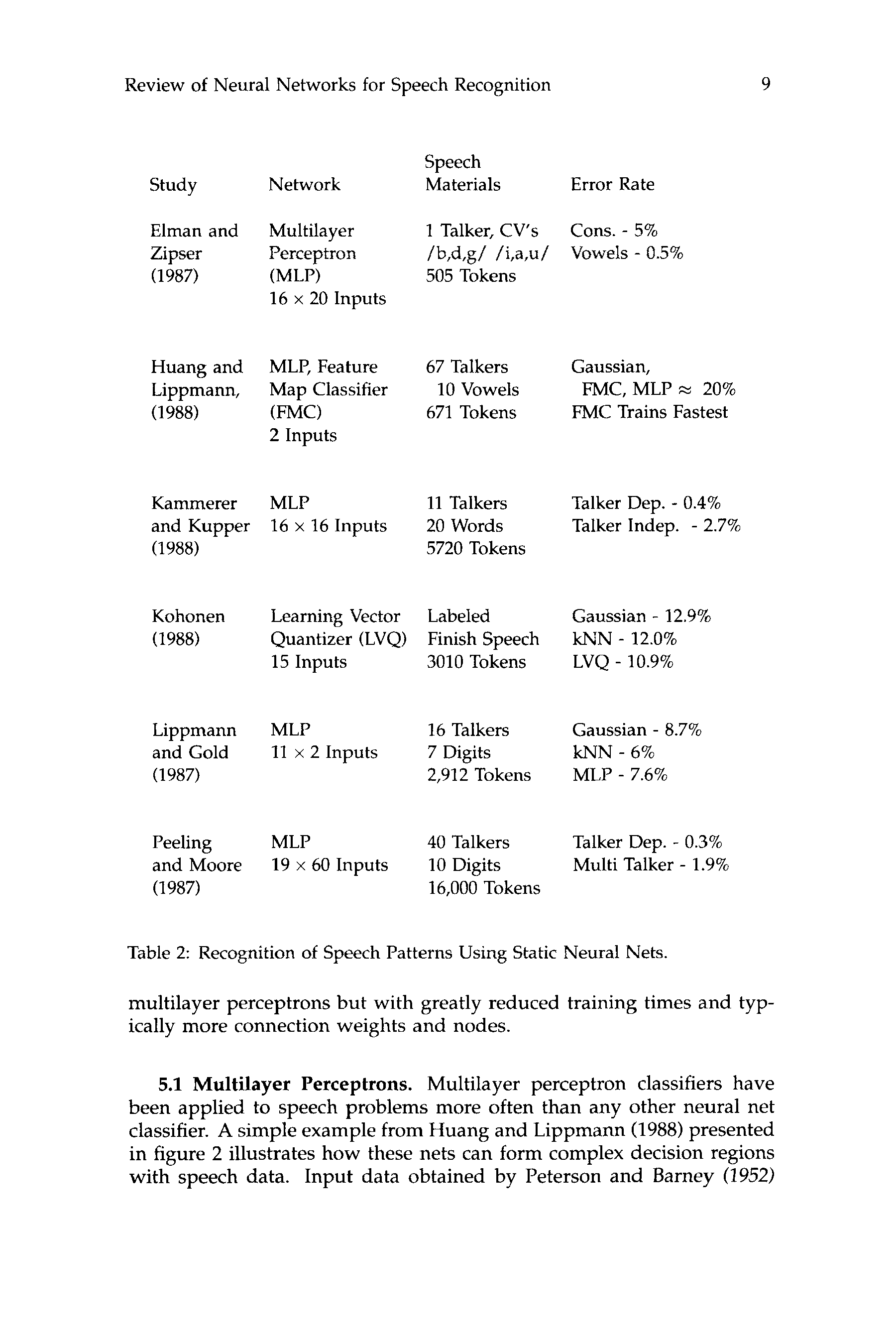
5 Static Classification of Speech Segments
Many neural net classifiers have been applied to the problem of classify-
ing static input patterns formed from a spectral analysis of pre-segmented
words, phonemes, and vowels. Table 2 summarizes results of some rep-
resentative studies. Introductions to many of the classifiers listed in this
table and to neural net training algorithms are available in (Cowan and
Sharp 1988; Hinton 1987; Lippmann et al. 1987). Unless otherwise noted,
error rates in this and other tables refer to talker-dependent training
and testing, multilayer perceptrons were trained using back-propagation
(Rumelhart et al. 1986a), and systems were trained and tested on differ-
ent data sets. The number of tokens in this and other tables refers to
the total number of speech samples available for both training and test-
ing and the label “multi-talker” refers to results obtained by testing and
training using data from the same group of talkers. The label “talker-
independent” refers to results obtained by training using one group of
talkers and testing using a separate group with no common members.
Input patterns for studies in table 2 were applied at once as one whole
static spectrographic (frequency versus time) pattern. Neural nets were
static and didn’t include internal delays or recurrent connections that
could take advantage of the temporal nature of the input for real-time
processing. This approach might be difficult to incorporate in real-time
speech recognizers because it would require long delays to perform seg-
mentation and form the input patterns in an input storage buffer. It
would also require accurate pre-segmentation of both testing and train-
ing data for good performance. This pre-segmentation was performed
by hand in many studies.
Multilayer perceptrons and hierarchical nets such as the feature-map
classifier and Kohonen’s learning vector quantizer (LVQ) have been used
to classify static patterns. Excellent talker-dependent recognition accu-
racy near that of experimental HMM and commercial recognizers has
been provided by multilayer perceptrons using small sets of words and
digits. Hierarchical nets have provided performance similar to that of
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
9
Study
Network
Elman and Multilayer
Perceptron
Zipser
( M W
(1987)
16 x 20 Inputs
Speech
Materials
Error Rate
1 Talker, CV’s Cons. – 5%
/b,d,g/ /i,a,u/ Vowels – 0.5%
505 Tokens
Huang and MLP, Feature
Lippmann, Map Classifier
(1988)
(FMC)
2 Inputs
67 Talkers
10 Vowels
671 Tokens
Gaussian,
FMC,MLP- 20%
FMC Trains Fastest
Kammerer MLP
and Kupper 16 x 16 Inputs
(1988)
11 Talkers
20 Words
5720 Tokens
Talker Dep. – 0.4%
Talker Indep. – 2.7%
Kohonen
(1988)
Learning Vector Labeled
Quantizer (LVQ) Finish Speech k” – 12.0%
LVQ – 10.9%
3010 Tokens
15 Inputs
Gaussian – 12.9%
Lippmann MLP
and Gold
(1987)
11 x 2 Inputs
16 Talkers
7 Digits
2,912 Tokens MLP – 7.6%
Gaussian – 8.7%
k” – 6%
Peeling
and Moore
(1987)
MLP
19 x 60 Inputs
40 Talkers
10 Digits
16,000 Tokens
Talker Dep. – 0.3%
Multi Talker – 1.9%
Table 2: Recognition of Speech Patterns Using Static Neural Nets.
multilayer perceptrons but with greatly reduced training times and typ-
ically more connection weights and nodes.
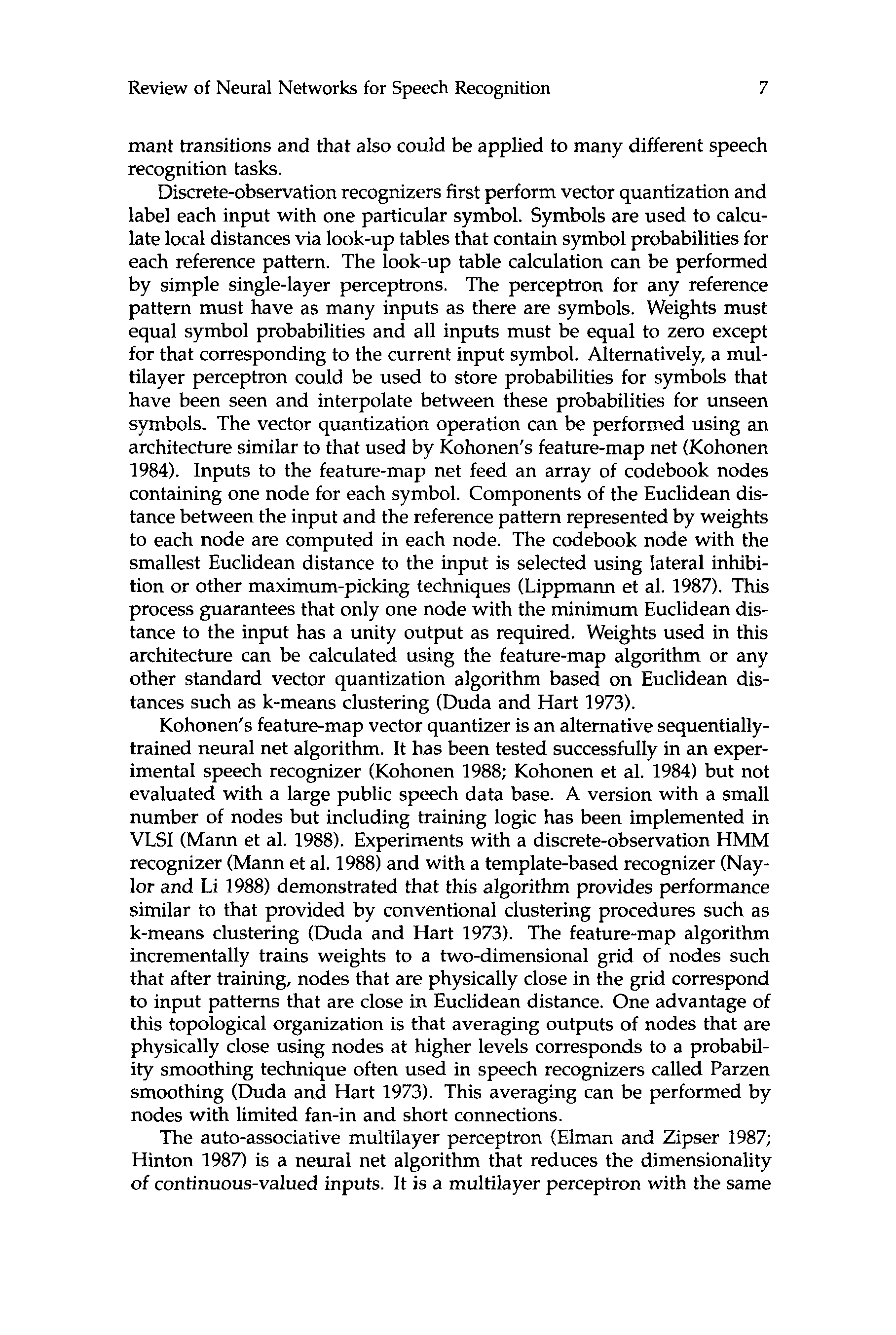
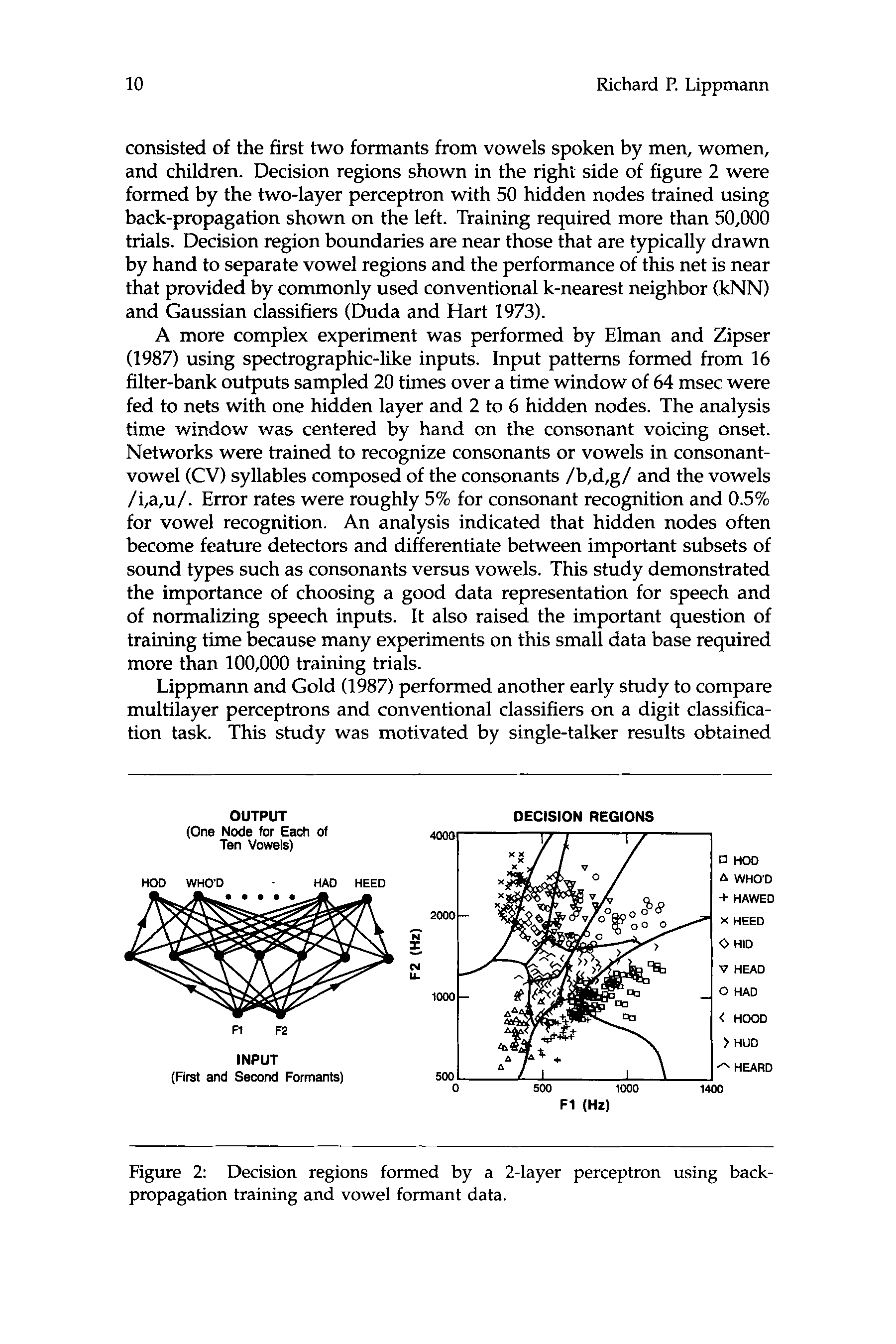
5.1 Multilayer Perceptrons. Multilayer perceptron classifiers have
been applied to speech problems more often than any other neural net
classifier. A simple example from Huang and Lippmann (1988) presented
in figure 2 illustrates how these nets can form complex decision regions
with speech data. Input data obtained by Peterson and Barney (1952)
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
10
Richard P. Lippmann
consisted of the first two formants from vowels spoken by men, women,
and children. Decision regions shown in the right side of figure 2 were
formed by the two-layer perceptron with 50 hidden nodes trained using
back-propagation shown on the left. Training required more than 50,000
trials. Decision region boundaries are near those that are typically drawn
by hand to separate vowel regions and the performance of this net is near
that provided by commonly used conventional k-nearest neighbor (k”)
and Gaussian classifiers (Duda and Hart 1973).
A more complex experiment was performed by Elman and Zipser
(1987) using spectrographic-like inputs. Input patterns formed from 16
filter-bank outputs sampled 20 times over a time window of 64 msec were
fed to nets with one hidden layer and 2 to 6 hidden nodes. The analysis
time window was centered by hand on the consonant voicing onset.
Networks were trained to recognize consonants or vowels in consonant-
vowel (CV) syllables composed of the consonants /b,d,g/ and the vowels
/i,a,u/. Error rates were roughly 5% for consonant recognition and 0.5%
for vowel recognition. An analysis indicated that hidden nodes often
become feature detectors and differentiate between important subsets of
sound types such as consonants versus vowels. This study demonstrated
the importance of choosing a good data representation for speech and
of normalizing speech inputs. It also raised the important question of
training time because many experiments on this small data base required
more than 100,000 training trials.
Lippmann and Gold (1987) performed another early study to compare
multilayer perceptrons and conventional classifiers on a digit classifica-
tion task. This study was motivated by single-talker results obtained
OUTPUT
(One Node for Each of
Ten Vowels)
DECISION REGIONS
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
0 HOD
A WHO’D
i- HAWED
X HEED
0 HID
V HEAD
0 HAD
< HOOD
> HUD
HEARD
2000
– N
3
N
U
500
0
INPUT
(First and Second Formants)
1000
1400
F1 (Hz)
Figure 2:
propagation training and vowel formant data.
Decision regions formed by a 2-layer perceptron using back-
Review of Neural Networks for Speech Recognition
11
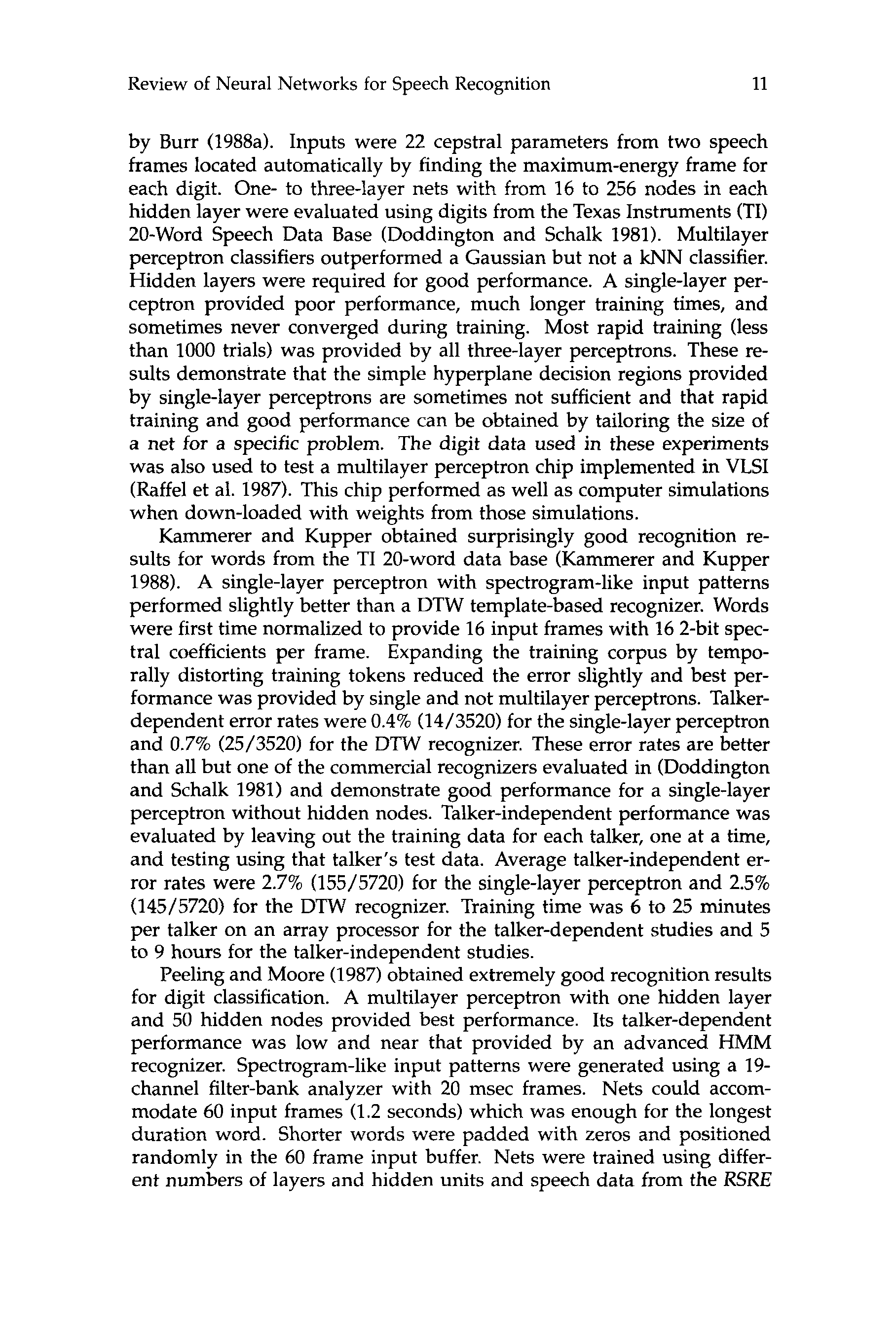
by Burr (1988a). Inputs were 22 cepstral parameters from two speech
frames located automatically by finding the maximum-energy frame for
each digit. One- to three-layer nets with from 16 to 256 nodes in each
hidden layer were evaluated using digits from the Texas Instruments (TI)
20-Word Speech Data Base (Doddington and Schalk 1981). Multilayer
perceptron classifiers outperformed a Gaussian but not a k” classifier.
Hidden layers were required for good performance. A single-layer per-
ceptron provided poor performance, much longer training times, and
sometimes never converged during training. Most rapid training (less
than 1000 trials) was provided by all three-layer perceptrons. These re-
sults demonstrate that the simple hyperplane decision regions provided
by single-layer perceptrons are sometimes not sufficient and that rapid
training and good performance can be obtained by tailoring the size of
a net for a specific problem. The digit data used in these experiments
was also used to test a multilayer perceptron chip implemented in VLSI
(Raffel et al. 1987). This chip performed as well as computer simulations
when down-loaded with weights from those simulations.
Kammerer and Kupper obtained surprisingly good recognition re-
sults for words from the TI 20-word data base (Kammerer and Kupper
1988). A single-layer perceptron with spectrogram-like input patterns
performed slightly better than a DTW template-based recognizer. Words
were first time normalized to provide 16 input frames with 16 2-bit spec-
tral coefficients per frame. Expanding the training corpus by tempo-
rally distorting training tokens reduced the error slightly and best per-
formance was provided by single and not multilayer perceptrons. Talker-
dependent error rates were 0.4% (14/3520) for the single-layer perceptron
and 0.7% (25/3520) for the DTW recognizer. These error rates are better
than all but one of the commercial recognizers evaluated in (Doddington
and Schalk 1981) and demonstrate good performance for a single-layer
perceptron without hidden nodes. Talker-independent performance was
evaluated by leaving out the training data for each talker, one at a time,
and testing using that talker’s test data. Average talker-independent er-
ror rates were 2.7% (155/5720) for the single-layer perceptron and 2.5%
(145/5720) for the DTW recognizer. Training time was 6 to 25 minutes
per talker on an array processor for the talker-dependent studies and 5
to 9 hours for the talker-independent studies.
Peeling and Moore (1987) obtained extremely good recognition results
for digit classification. A multilayer perceptron with one hidden layer
and 50 hidden nodes provided best Performance. Its talker-dependent
performance was low and near that provided by an advanced HMM
recognizer. Spectrogram-like input patterns were generated using a 19-
channel filter-bank analyzer with 20 msec frames. Nets could accom-
modate 60 input frames (1.2 seconds) which was enough for the longest
duration word. Shorter words were padded with zeros and positioned
randomly in the 60 frame input buffer. Nets were trained using differ-
ent numbers of layers and hidden units and speech data from the RSRE
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
12
Richard I? Lippmann
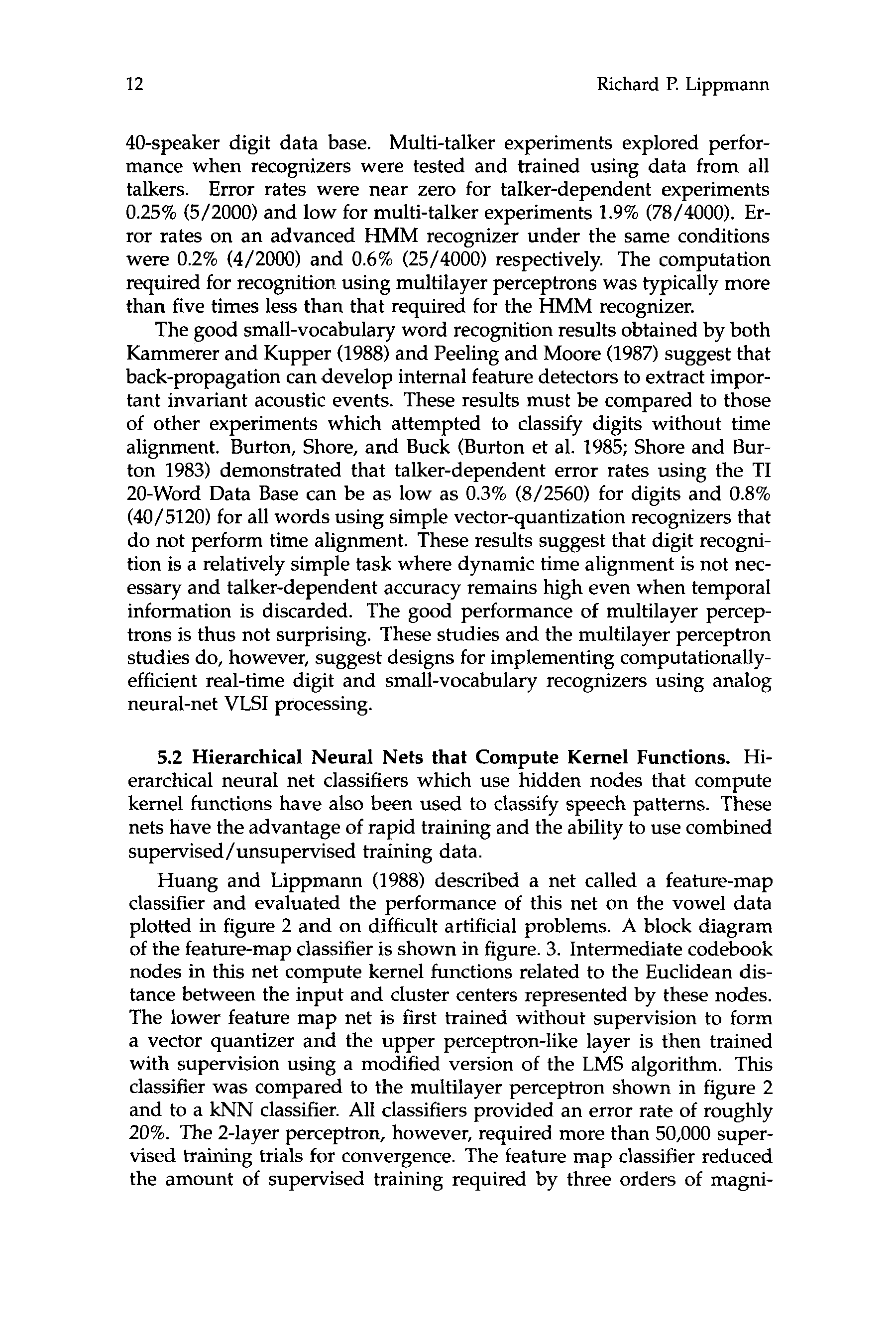
40-speaker digit data base. Multi-talker experiments explored perfor-
mance when recognizers were tested and trained using data from all
talkers. Error rates were near zero for talker-dependent experiments
0.25% (5/2000) and low for multi-talker experiments 1.9% (78/4000). Er-
ror rates on an advanced HMM recognizer under the same conditions
were 0.2% (4/2000) and 0.6% (25/4000) respectively. The computation
required for recognition using multilayer perceptrons was typically more
than five times less than that required for the HMM recognizer.
The good small-vocabulary word recognition results obtained by both
Kammerer and Kupper (1988) and Peeling and Moore (1987) suggest that
back-propagation can develop internal feature detectors to extract impor-
tant invariant acoustic events. These results must be compared to those
of other experiments which attempted to classify digits without time
alignment. Burton, Shore, and Buck (Burton et al. 1985; Shore and Bur-
ton 1983) demonstrated that talker-dependent error rates using the TI
20-Word Data Base can be as low as 0.3% (8/2560) for digits and 0.8%
(40/5120) for all words using simple vector-quantization recognizers that
do not perform time alignment. These results suggest that digit recogni-
tion is a relatively simple task where dynamic time alignment is not nec-
essary and talker-dependent accuracy remains high even when temporal
information is discarded. The good performance of multilayer percep-
trons is thus not surprising. These studies and the multilayer perceptron
studies do, however, suggest designs for implementing computationally-
efficient real-time digit and small-vocabulary recognizers using analog
neural-net VLSI processing.
5.2 Hierarchical Neural Nets that Compute Kernel Functions. Hi-
erarchical neural net classifiers which use hidden nodes that compute
kernel functions have also been used to classify speech patterns. These
nets have the advantage of rapid training and the ability to use combined
supervised/unsupervised training data.
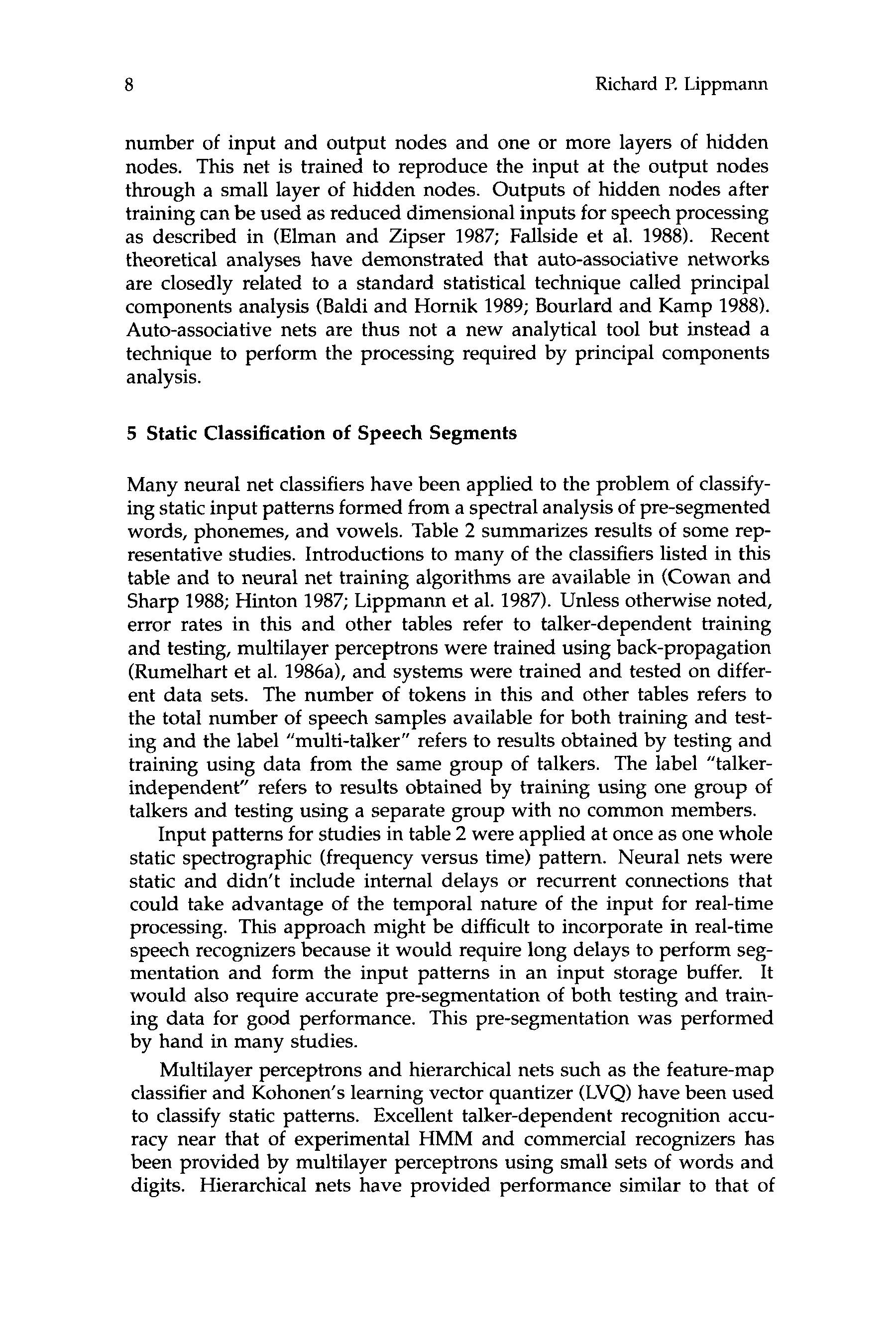
Huang and Lippmann (1988) described a net called a feature-map
classifier and evaluated the performance of this net on the vowel data
plotted in figure 2 and on difficult artificial problems. A block diagram
of the feature-map classifier is shown in figure. 3. Intermediate codebook
nodes in this net compute kernel functions related to the Euclidean dis-
tance between the input and cluster centers represented by these nodes.
The lower feature map net is first trained without supervision to form
a vector quantizer and the upper perceptron-like layer is then trained
with supervision using a modified version of the LMS algorithm. This
classifier was compared to the multilayer perceptron shown in figure 2
and to a k” classifier. All classifiers provided an error rate of roughly
20%. The 2-layer perceptron, however, required more than 50,000 super-
vised training trials for convergence. The feature map classifier reduced
the amount of supervised training required by three orders of magni-
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
13
OUTPUT
A
c -‘
SUPERVISED
TRAINING
UNSUPERVISED
TRAINING
INPUT
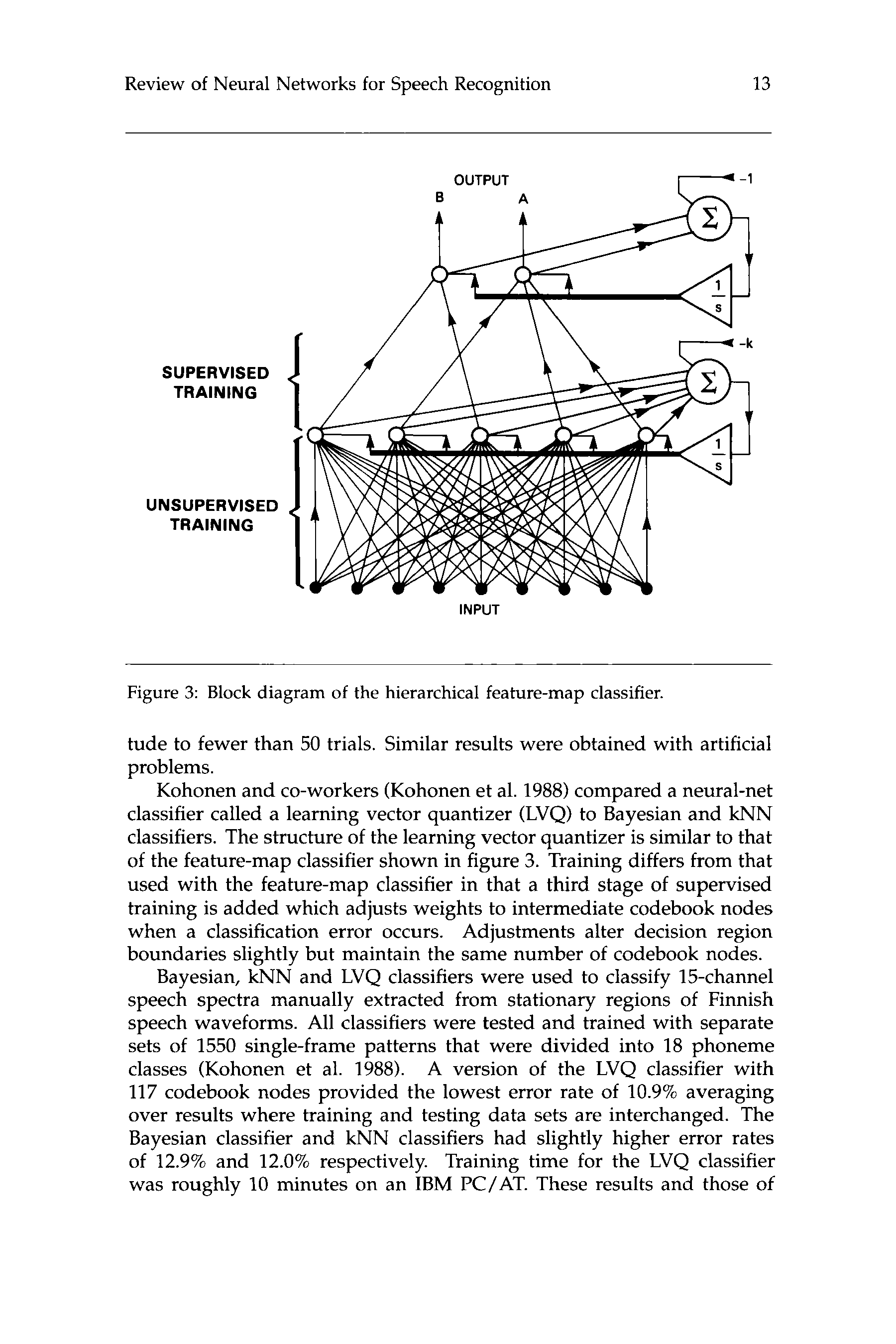
Figure 3: Block diagram of the hierarchical feature-map classifier.
tude to fewer than 50 trials. Similar results were obtained with artificial
problems.
Kohonen and co-workers (Kohonen et al. 1988) compared a neural-net
classifier called a learning vector quantizer (LVQ) to Bayesian and kNN
classifiers. The structure of the learning vector quantizer is similar to that
of the feature-map classifier shown in figure 3. Training differs from that
used with the feature-map classifier in that a third stage of supervised
training is added which adjusts weights to intermediate codebook nodes
when a classification error occurs. Adjustments alter decision region
boundaries slightly but maintain the same number of codebook nodes.
Bayesian, k” and LVQ classifiers were used to classify 15-channel
speech spectra manually extracted from stationary regions of Finnish
speech waveforms. All classifiers were tested and trained with separate
sets of 1550 single-frame patterns that were divided into 18 phoneme
classes (Kohonen et al. 1988). A version of the LVQ classifier with
117 codebook nodes provided the lowest error rate of 10.9% averaging
over results where training and testing data sets are interchanged. The
Bayesian classifier and kNN classifiers had slightly higher error rates
of 12.9% and 12.0% respectively. Training time for the LVQ classifier
was roughly 10 minutes on an IBM PC/AT. These results and those of
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
14
Richard I? Lippmann
Huang and Lippmann (1988) demonstrate that neural nets that use kernel
functions can provide excellent performance on speech tasks using prac-
tical amounts of training time. Other experiments on artificial problems
described in (Kohonen et al. 1988) illustrate trade-offs in training time.
Boltzmann machines provided near optimal performance on these prob-
lems followed by the LVQ classifier and multilayer perceptrons. Training
times were 5 hours on an array processor for the Boltzmann machine, 1
hour on a Masscomp MC 5600 for the multilayer perceptron, and roughly
20 minutes on the Masscomp for the LVQ classifier.
Two recent studies (Niranjan and Fallside 1988; Bridle 1988) have
begun to explore a hierarchical net where nodes in a hidden layer com-
pute kernel functions called radial basis functions (Broomhead and Lowe
1988). These nets are similar to previous classifiers that use the method of
potential functions (Duda and Hart 1973). They have an advantage over
multilayer perceptrons in that once the locations of the kernel functions
are established, weights to the output nodes are determined uniquely by
solving a least squares problem using matrix-based approaches. Initial
results with small amounts of speech data consisting of vowels (Niran-
jan and Fallside 1988) and words (Bridle 1988) have been encouraging.
Further work must explore techniques to assign the locations of kernel
functions and adjust scale factors that determine the range of influence
of each kernel function.
6 Dynamic Classification of Speech Segments
New dynamic neural net classifiers that incorporate short delays, tempo-
ral integration, or recurrent connections have been developed specifically
for speech recognition. Spectral inputs for these classifiers are applied
to input nodes sequentially, one frame at a time. These classifiers could
thus be integrated into real time speech recognizers more easily than
static nets because accurate pre-segmentation is typically not required
for good performance and only short delays are used.
Both multilayer nets with delays and nets with recurrent connections
have been used to classify acoustically similar words, consonants, and
vowels. Excellent performance has been obtained using time delay nets in
many studies including those by Lang and Hinton (1988) and by Waibel
et al. (1987; 1988). Performance for small vocabularies often slightly
exceeded that provided by high-performance experimental HMM recog-
nizers. Techniques have also been developed to scale nets up for larger
vocabularies and to speed up training times both for feed-forward and
recurrent nets. Rapid training has been demonstrated using a hierar-
chical learning vector quantizer with delays and good performance but
extremely long training times has been provided by Boltzmann machines.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
15
6.1 Time-Delay Multilayer Perceptrons. Some of the most promis-
ing neural-net recognition results have been obtained using multilayer
perceptrons with delays and some form of temporal integration in out-
p u t nodes (Lang and Hinton 1988; Waibel et al. 1987; Waibel et al. 1988).
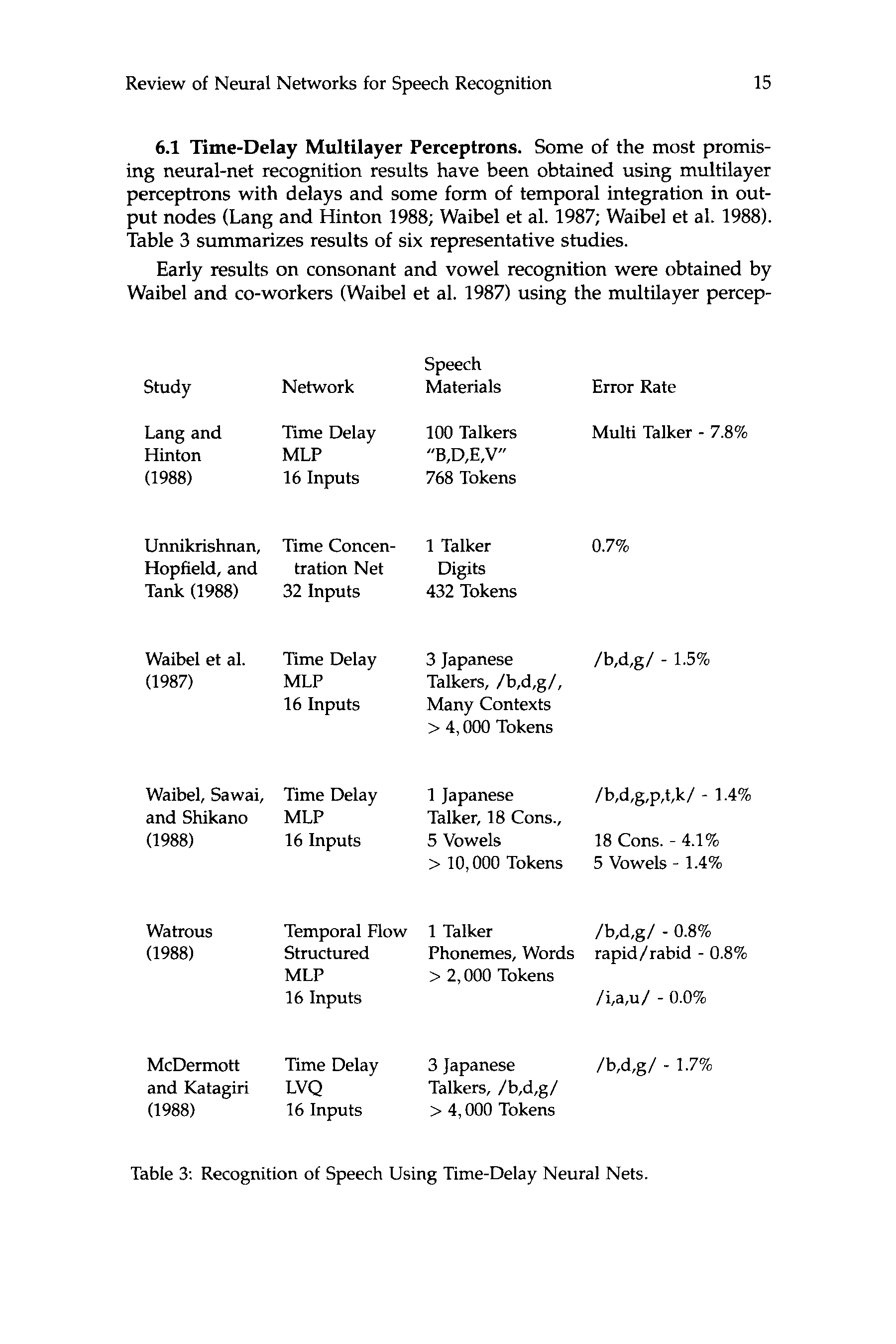
Table 3 summarizes results of six representative studies.
Early results on consonant and vowel recognition were obtained by
Waibel a n d co-workers (Waibel e t al. 1987) using the multilayer percep-
Study
Network
Speech
Materials
Lang and
Hinton
(1988)
Time Delay
MLP
16 Inputs
100 Talkers
”B,D,E,V”
768 Tokens
Error Rate
Multi Talker – 7.8%
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
Unnikrishnan, Time Concen-
Hopfield, and
Tank (1988)
tration Net
32 Inputs
1 Talker
Digits
432 Tokens
0.7%
Waibel et al.
(1987)
Time Delay
MLP
16 Inputs
3 Japanese
Talkers, /b,d,g/,
Many Contexts
> 4,000 Tokens
/b,d,g/ – 1.5%
Waibel, Sawai, Time Delay
and Shikano MLP
(1988)
16 Inputs
1 Japanese
Talker, 18 Cons.,
5 Vowels
> 10,000 Tokens
/b,d,g,p,t,k/ – 1.4%
18 Cons. – 4.1%
5 Vowels – 1.4%
Watrous
(1988)
Temporal Flow
Structured
MLP
16 Inputs
1 Talker
Phonemes, Words
> 2,000 Tokens
/b,d,g/ – 0.8%
rapid/rabid – 0.8%
/i,a,u/ – 0.0%
McDermott
and Katagiri
(1988)
Time Delay
LVQ
16 Inputs
3 Japanese
Talkers, /b,d,g/
> 4,000 Tokens
/b,d,g/ – 1.7%
Table 3: Recognition of Speech Using Time-Delay Neural Nets.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
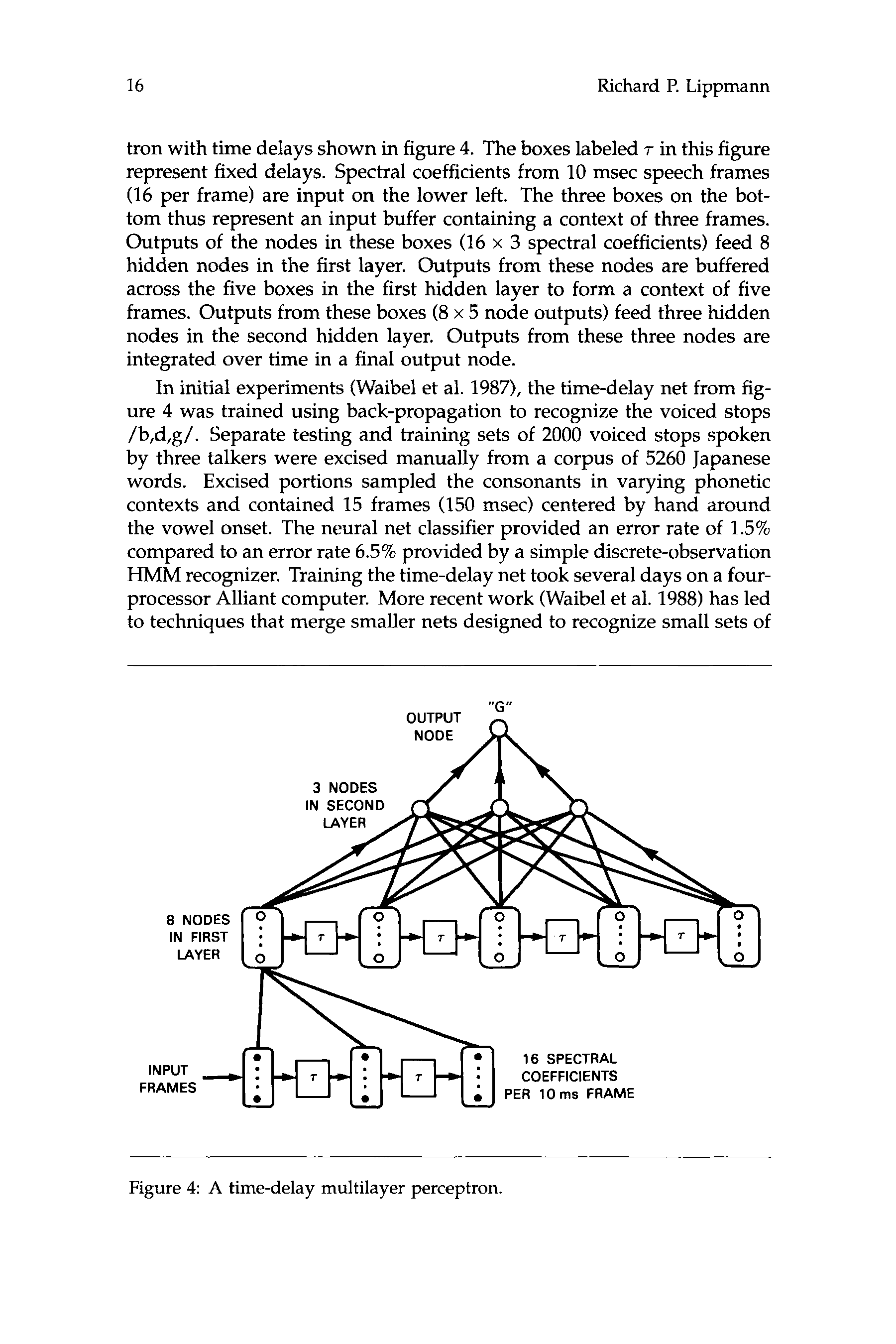
16
Richard P. Lippmann
tron with time delays shown in figure 4. The boxes labeled r in this figure
represent fixed delays. Spectral coefficients from 10 msec speech frames
(16 per frame) are input on the lower left. The three boxes on the bot-
tom thus represent an input buffer containing a context of three frames.
Outputs of the nodes in these boxes (16 x 3 spectral coefficients) feed 8
hidden nodes in the first layer. Outputs from these nodes are buffered
across the five boxes in the first hidden layer to form a context of five
frames. Outputs from these boxes (8 x 5 node outputs) feed three hidden
nodes in the second hidden layer. Outputs from these three nodes are
integrated over time in a final output node.
In initial experiments (Waibel et al. 1987), the time-delay net from fig-
ure 4 was trained using back-propagation to recognize the voiced stops
/b,d,g/. Separate testing and training sets of 2000 voiced stops spoken
by three talkers were excised manually from a corpus of 5260 Japanese
words. Excised portions sampled the consonants in varying phonetic
contexts and contained 15 frames (150 msec) centered by hand around
the vowel onset. The neural net classifier provided an error rate of 1.5%
compared to an error rate 6.5% provided by a simple discrete-observation
HMM recognizer. Training the time-delay net took several days on a four-
processor Alliant computer. More recent work (Waibel et al. 1988) has led
to techniques that merge smaller nets designed to recognize small sets of
OUTPUT –
“G”
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
:
COEFFICIENTS
Figure 4: A time-delay multilayer perceptron.
Review of Neural Networks for Speech Recognition
17
consonants and vowels into large nets which can recognize all consonants
at once. These techniques greatly reduce training time, improve perfor-
mance and are a practical approach to the scaling problem. Experiments
resulted in low error rates of 1.4% for the consonants /b,d,g,p,t,k/ and
1.4% for the vowels /i,a,u,e,o/. The largest net designed from smaller
subnets provided a talker-dependent error rate for one talker of 4.1% for
18 consonants. An advanced discrete-observation HMM recognizer pro-
vided an error rate of 7.3% on this task. These two studies demonstrate
that good performance can be provided by time-delay nets when the net-
work structure is tailored to a specific problem. They also demonstrate
how small nets can be scaled up to solve large classification problems
without scaling u p training times substantially.
Lang and Hinton (1988) describe an extensive series of experiments
that led to a similar high-performance time-delay net. This net was de-
signed to classify four acoustically similar isolated words “B”, “ D , ”E”,
and “V” that are the most confusable subset from the spoken alphabet. A
multi-talker recognizer for 100 male talkers was first trained and tested
using pre-segmented 144 msec speech samples taken from around the
vowel onset in these words. A technique called multi-resolution train-
ing was developed to shorten training time. This involved training nets
with smaller numbers of hidden nodes, splitting weight values to hid-
den nodes to create larger desired nets, and then re-training the larger
nets. A multiresolution trained net provided an error rate of 8.6%. This
result, however, required careful pre-segmentation of each word. Pre-
segmentation was not required by another net which allowed continu-
ous speech input and classified the input as that word corresponding to
the output node whose output value reached the highest level. Training
used simple automatic energy-based segmentation techniques to extract
216 msecs of speech from around the vowel onset in each word. This
resulted in an error rate of 9.5%. Outputs were then trained to be high
and correct for the 216 msec speech segments as before, but also low for
counter-example inputs selected randomly from the left-over background
noise and vowel segments. Inclusion of counter-examples reduced the
error rate to 7.8%. This performance compares favorably with the 11%
error rate estimated for an enhanced HMM recognizer on this data base
and based on performance with the complete E-set (Bahl et al. 1988; Lang
and Hinton 1988).
Watrous (1988) also explored multilayer perceptron classifiers with
time delays that extended earlier exploratory work on nets with recurrent
connections (Watrous and Shastri 1987). These multilayer nets differed
from those described above in that recurrent connections were provided
on output nodes, target outputs were Gaussian-shaped pulses, and delays
and the network structure were carefully adjusted by hand to extract
important speech features for each classification task. Networks were
tested using hand-segmented speech and isolated words from one talker.
Good discrimination was obtained for many different recognition tasks.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
18
Richard P. Lippmann
For example, the error rate was 0.8% for the consonants /b,d,g/, 0.8% for
the word pair “rapid/rabid,” and 0.0% for the vowels /i,a,u/. Watrous
has also explored the use of gradient methods of nonlinear optimization
to decrease training time (Watrous 1986).
Rossen et al. (1988) recently described another time delay classifier. It
uses more complex input data representations than the time-delay nets
described above and a brain-state-in-a-box neural net classifier to inte-
grate information over time from lower-level networks. Good classifica-
tion performance was obtained for six stop consonants and three vow-
els. Notable features of this work are training to reject noise inputs as in
(Lang and Hinton 1988) and the use of modular techniques to build large
nets from smaller trained modules as in (Waibel et al. 1988). Other re-
cent work demonstrating good phoneme and syllable classification using
structured multilayer perceptron nets with delays is described in (Har-
rison and Fallside 1988; Homma et al. 1988; Irino and Kawahara 1988;
Kamm et al. 1988; Leung and Zue 1988).
Unnikrishnan, Hopfield, and Tank (1988) obtained low error rates on
digit classification using a time-concentration neural net that does not
use only simple delays. This net, described in (Tank and Hopfield 1987),
uses variable length delay lines designed to disperse impulsive inputs
such that longer delays result in more dispersion. Impulsive inputs to
these delay lines are formed by enhancing spectral peaks in the outputs
of 32 bandpass filters. Outputs of delay lines are multiplied by weights
and summed to form separate matched filters for each word. These
matched filters concentrate energy in time and produce a large output
pulse at the end of the correct word. Limited evaluations reported in
(Unnikrishnan et al. 1988) for digit strings from one talker demonstrated
good performance using a modified form of back-propagation training.
A prototype version of this recognizer using discrete analog electronic
devices was also constructed (Tank and Hopfield 1987). Tests performed
by Gold with a large speech data base and a hierarchical version of the
time concentration net that included both allophone and word models
yielded performance that was no better than that of an existing HMM
recognizer (Gold 1988).
6.2 Hierarchical Nets that Compute Kernel Functions. McDermott
and Katagiri (1988) used Kohonen’s LVQ classifier on the same /b,d,g/
speech data base used by Waibel et al. (1987). They were able to obtain an
error rate of 1.7% which is not statistically different from the 1.5% error
rate obtained by Waibel et al. using the time-delay net shown in figure 4
(Waibel et al. 1987). Inputs for the LVQ classifier consisted of a 7-frame
window of 16 filterbank outputs. The nearest of 150 codebook nodes
were determined as the 15-frame speech samples were passed through
this 7-frame window. The normalized distances between nearest nodes
and 112-element input patterns were integrated over time and used to
classify speech inputs. The error rate without the final stage of LVQ train-
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
19
ing was high (7.3%). It dropped to 1.7% after LVQ training was complete.
This result demonstrates that nets with kernel functions and delays can
perform as well as multilayer perceptrons with delays. These nets train
faster but require more computation and memory during use. In this ap-
plication, for example, the LVQ classifier required 17,000 weights which
was more than 30 times as many required for the time-delay net used
in (Waibel et al. 1987). If memory is not an important limitation, rapid
search techniques such as hashing and k-d trees described in (Omohun-
dro 1987) can be applied to the LVQ classifier to greatly reduce the time
required to find nearest-neighbors. This would make the differences in
computation time between these alternative approaches small on existing
serial Von Neuman computers.
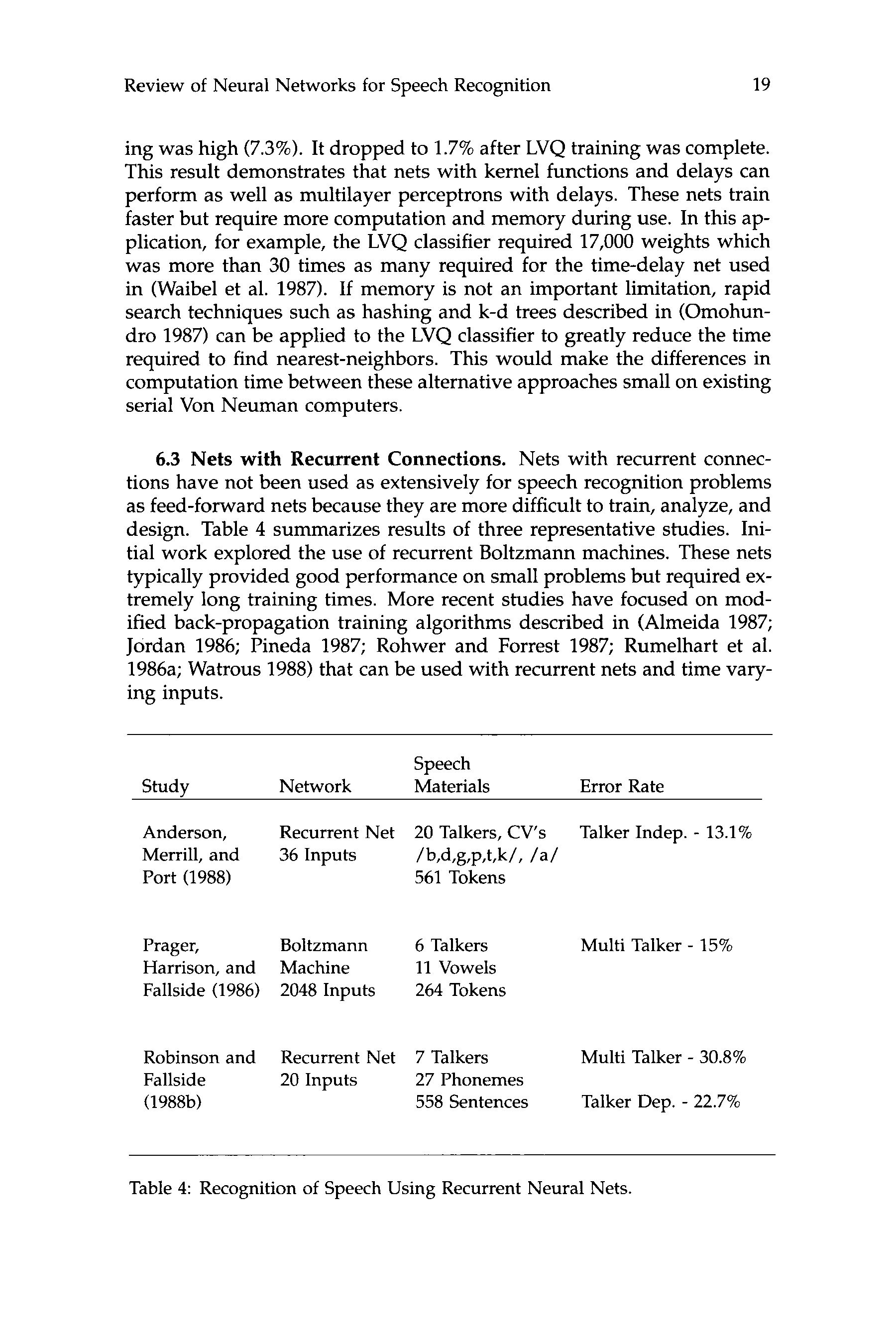
6.3 Nets with Recurrent Connections. Nets with recurrent connec-
tions have not been used as extensively for speech recognition problems
as feed-forward nets because they are more difficult to train, analyze, and
design. Table 4 summarizes results of three representative studies. Ini-
tial work explored the use of recurrent Boltzmann machines. These nets
typically provided good performance on small problems but required ex-
tremely long training times. More recent studies have focused on mod-
ified back-propagation training algorithms described in (Almeida 1987;
Jordan 1986; Pineda 1987; Rohwer and Forrest 1987; Rumelhart et al.
1986a; Watrous 1988) that can be used with recurrent nets and time vary-
ing inputs.
Studv
Network
Speech
Materials
Error Rate
Anderson,
Merrill, and
Port (1988)
Recurrent Net 20 Talkers, Cv’s
/b,d,g,p,t,k/, /a/
36 Inputs
561 Tokens
Talker Indep. – 13.1%
Prager,
Harrison, and Machine
Fallside (1986) 2048 Inputs
Boltzmann
6 Talkers
11 Vowels
264 Tokens
Multi Talker – 15%
Robinson and Recurrent Net 7 Talkers
Fallside
20 Inputs
(1988b)
27 Phonemes
558 Sentences
Multi Talker – 30.8%
Talker Dep. – 22.7%
Table 4: Recognition of Speech Using Recurrent Neural Nets.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
20
Richard I? Lippmann
OUTPUTS
I
r
I
HIDDEN NODES
n INPUTS
“STATES, y (t-1)
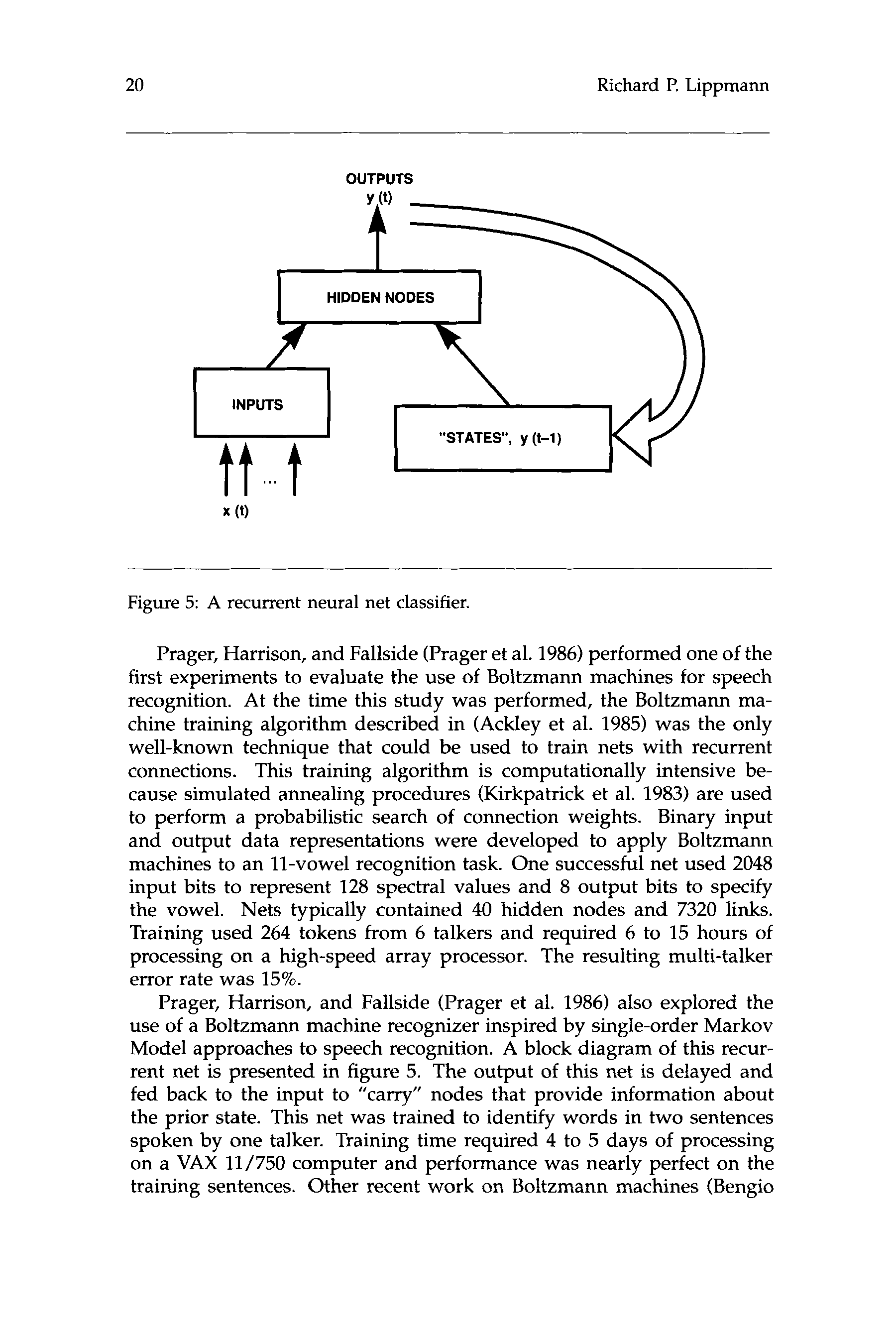
Figure 5: A recurrent neural net classifier.
Prager, Harrison, and Fallside (Prager et al. 1986) performed one of the
first experiments to evaluate the use of Boltzmann machines for speech
recognition. At the time this study was performed, the Boltzmann ma-
chine training algorithm described in (Ackley et al. 1985) was the only
well-known technique that could be used to train nets with recurrent
connections. This training algorithm is computationally intensive be-
cause simulated annealing procedures (Kirkpatrick et al. 1983) are used
to perform a probabilistic search of connection weights. Binary input
and output data representations were developed to apply Boltzmann
machines to an 11-vowel recognition task. One successful net used 2048
input bits to represent 128 spectral values and 8 output bits to specify
the vowel. Nets typically contained 40 hidden nodes and 7320 links.
Training used 264 tokens from 6 talkers and required 6 to 15 hours of
processing on a high-speed array processor. The resulting multi-talker
error rate was 15%.
Prager, Harrison, and Fallside (Prager et al. 1986) also explored the
use of a Boltzmann machine recognizer inspired by single-order Markov
Model approaches to speech recognition. A block diagram of this recur-
rent net is presented in figure 5. The output of this net is delayed and
fed back to the input to “carry” nodes that provide information about
the prior state. This net was trained to identify words in two sentences
spoken by one talker. Training time required 4 to 5 days of processing
on a VAX 11/750 computer and performance was nearly perfect on the
training sentences. Other recent work on Boltzmann machines (Bengio
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
21
and De Mori 1988; Kohonen et al. 1988; Prager and Fallside 1987) demon-
strates that good performance can be provided at the expense of exces-
sive training time. Preliminary work on analog VLSI implementations
of the training algorithm required by Boltzmann machines has demon-
strated practical learning times for small hardware networks (Alspector
and Allen 1987).
Many types of recurrent nets have been proposed that can be trained
with modified forms of back-propagation. Jordan (1986) appears to have
been the first to study nets with recurrent connections from output to
input nodes as in figure 5. He used these nets to produce pattern se-
quences. Bourlard and Wellekens (1988) recently proved that such nets
could be used to calculate local probabilities required in HMM recog-
nizers and Robinson and Fallside (1988a) pointed out the relationship
between these nets and state space equations used in classical control
theory. Nets with recurrent self-looping connections on hidden and out-
put nodes were studied by Watrous and Shastri (1987) for a speech recog-
nition application. Nets with recurrent connections from hidden nodes
to input nodes were studied by Elman (1988) and by Servan-Schreiber,
Cleeremans, and McClelland (1 988) for natural language applications.
Two recent studies have explored recurrent nets similar to the net
shown in figure 5 when trained with modified forms of back-propagation.
Robinson and Fallside (1988b) used such a net to label speech frames with
one of 27 phoneme labels using hand-marked testing and training data.
Training used an algorithm suggested by Rumelhart et al. (1986a) that,
in effect, replicates the net at every time step during training. Talker-
dependent error rates were 22.7% for the recurrent net and 26.0% for
a simple feed-forward net with delays between input nodes to provide
input context. Multi-talker error rates were 30.8% for the recurrent net
and 40.8% for the feed-forward net. A 64 processor array of transputers
provided practical training times in these experiments.
Anderson, Merrill, and Port (1988) also explored recurrent nets similar
to the net in figure 5 . Stimuli were CV syllables formed from six stop
consonants and the vowel /a/ that were hand segmented to contain 120
msecs of speech around the vowel onset. Nets were trained on data
from 10 talkers, tested on data from 10 other talkers, and contained from
one to two hidden layers with different numbers of hidden nodes. Best
performance (an error rate of 13.1%) was provided by a net with two
hidden layers.
7 Integrating Neural Net and Conventional Approaches
Researchers are beginning to combine conventional HMM and DTW
speech recognition algorithms with neural net classification algorithms
and also to design neural net architectures that perform computations
required by important speech recognition algorithms. This may lead
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
22
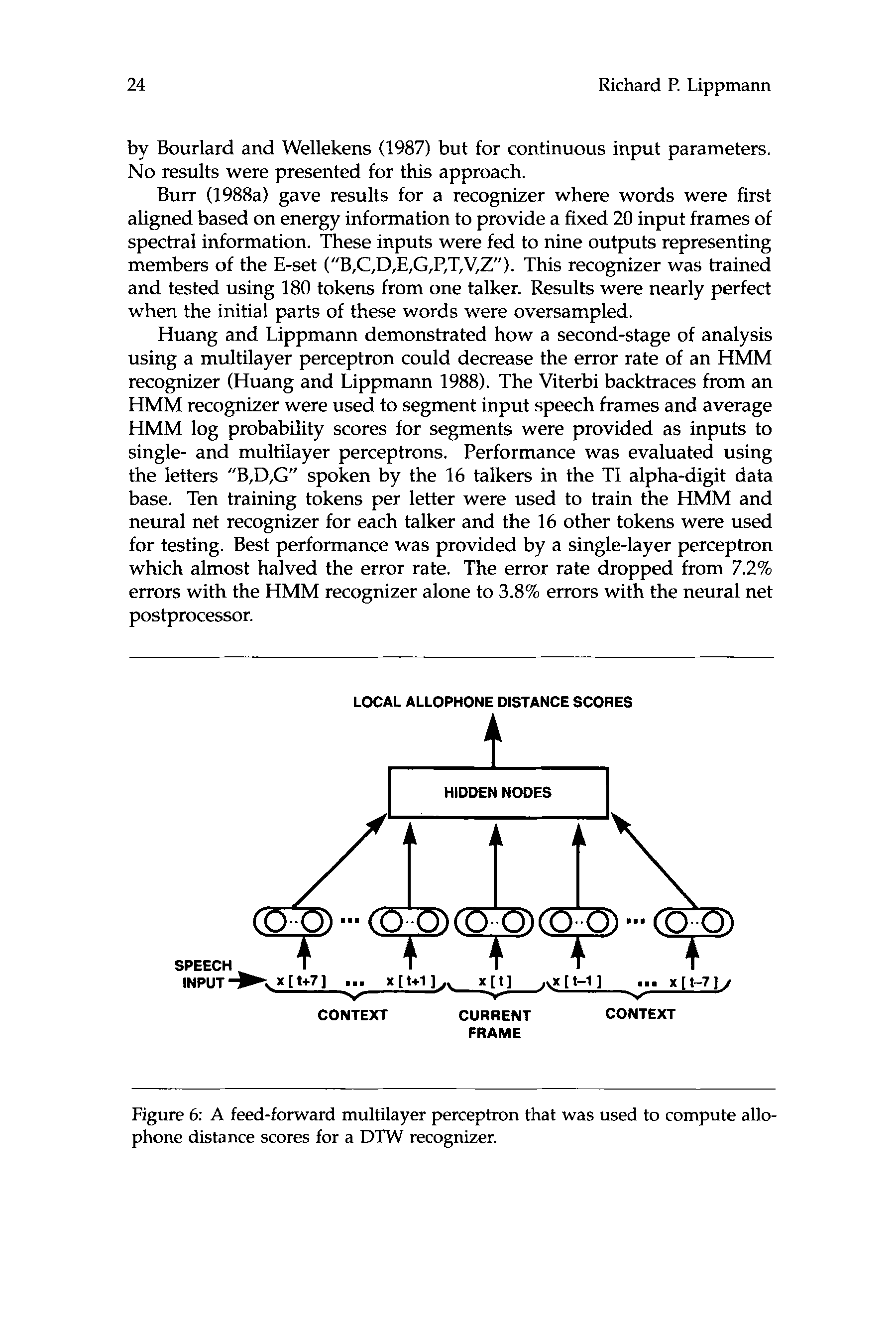
Richard P. Lippmann
Studv
Avvroach
Comments
Bourlard and
Wellekens
(1987)
MLP Provides Allophone
Distance Scores
for DTW Recognizer
Good Performance on
918-Word, Talker-
Dependent, Contin-
uous-Speech Task
Burr (1988a)
MLP Classifier After
Energy-Based DTW
Tested on Single-
Talker E-Set
Huang and
Lippmann
(1988)
Second-Stage MLP
Discrimination After
HMM Recognizer
Improved Performance
for “B,D,G from TI
Alpha-Digit Data Base
Lippmann
and Gold
(1987)
“Viterbi-Net” Neural
Net Architecture for
HMM Viterbi Decoder
Same Good Perform-
ance on Large Data
Base as Robust HMM
Recognizer
Sakoe and
Is0 (1987)
MLP Provides Distance
Scores for DTW
Recognizer
No Hand Labeling
Required, Untested
Table 5: Studies Combining Neural Net and Conventional Approaches.
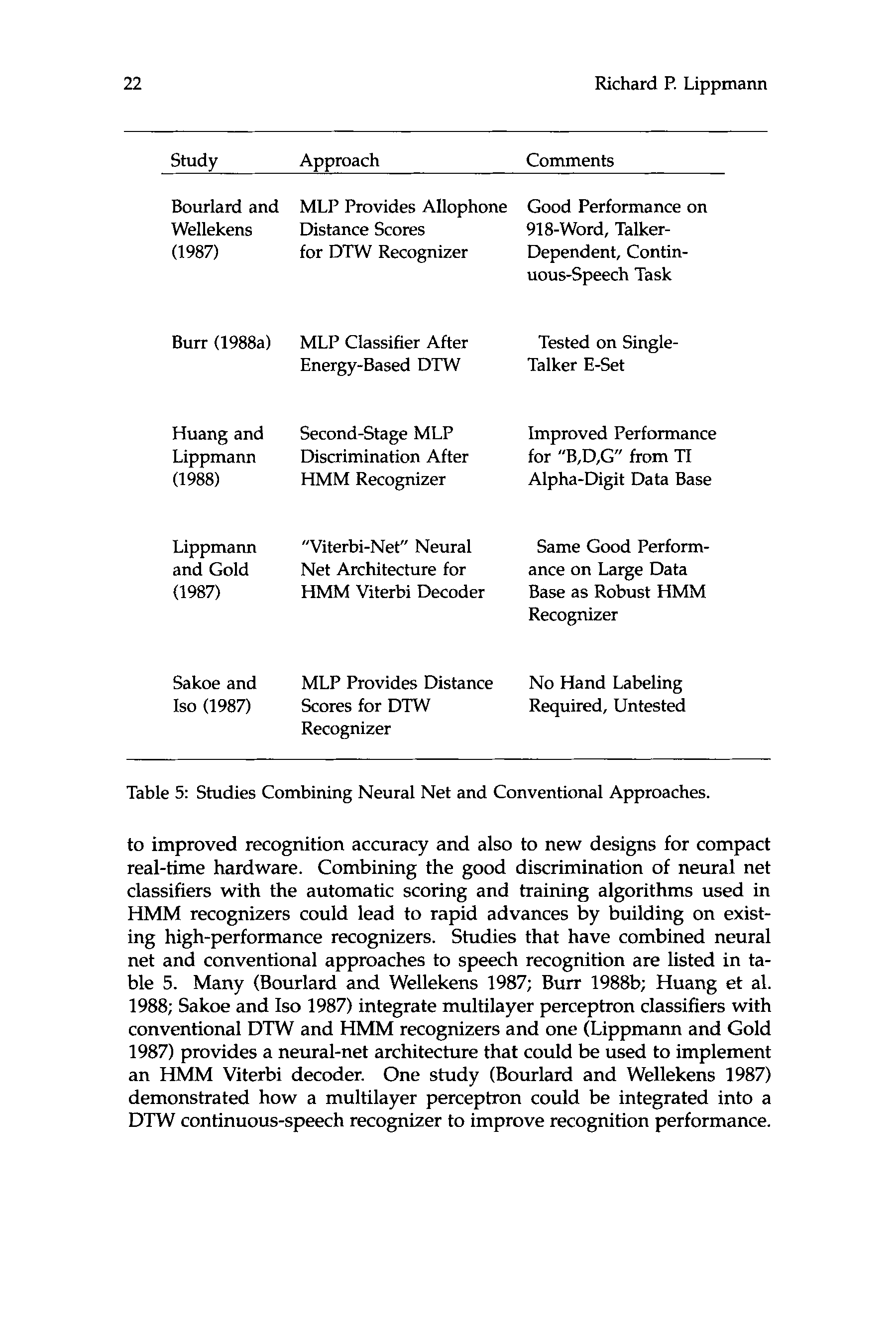
to improved recognition accuracy and also to new designs for compact
real-time hardware. Combining the good discrimination of neural net
classifiers with the automatic scoring and training algorithms used in
HMM recognizers could lead to rapid advances by building on exist-
ing high-performance recognizers. Studies that have combined neural
net and conventional approaches to speech recognition are listed in ta-
ble 5. Many (Bourlard and Wellekens 1987; Bun 1988b; Huang et al.
1988; Sakoe and Is0 1987) integrate multilayer perceptron classifiers with
conventional DTW and HMM recognizers and one (Lippmann and Gold
1987) provides a neural-net architecture that could be used to implement
an HMM Viterbi decoder. One study (Bourlard and Wellekens 1987)
demonstrated how a multilayer perceptron could be integrated into a
DTW continuous-speech recognizer to improve recognition performance.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
23
7.1 Integrating Multilayer Perceptron Classifiers with DTW and
HMM Recognizers. At least three groups have proposed recognizers
where multilayer perceptrons compute distance scores used in DTW or
HMM recognizers (Bourlard and Wellekens 1987; Burr 1988a; Sakoe and
Is0 1987). Bourlard and Wellekens (1987) demonstrated how the multi-
layer perceptron shown in figure 6 could be used to calculate allophone
distance scores required for phoneme and word recognition in a DTW
discrete-observation recognizer. One net had inputs from 15 frames of
speech centered on the current frame, 50 hidden nodes, and 26 output
nodes. Outputs corresponded to allophones in a 10-digit German vo-
cabulary. Inputs were from 60 binary variables per frame. One input
bit was on in each frame to specify the codebook entry that represented
that frame. The multilayer perceptron was trained using hand-labeled
training data to provide a high output only for that output node corre-
sponding to the current input allophone. Recognition then used dynamic
time warping with local distances equal to values from output nodes.
This provides good discrimination from the neural net and integration
over time from the DTW algorithm. Perfect recognition performance was
provided for recognition of 100 tokens from one talker.
Bourlard and Wellekens (1987) also used a multilayer perceptron with
contextual input and DTW to recognize words from a more difficult 919-
word talker-dependent continuous-speech task. The net covered an in-
put context of 9 frames, used one of 132 vectors to quantize each frame,
had 50 or 200 hidden nodes, and had 50 output nodes corresponding to
50 German phonemes. This net was trained using 100 hand-segmented
sentences and tested on 188 other sentences containing roughly 7300
phonemes. The phoneme error rate was 41.6% with 50 hidden nodes
and 37% with 200 hidden nodes. These error rates were both lower than
the 47.5% error rate provided by a simple discrete-observation HMM
recognizer with duration modeling and one probability histogram per
phoneme. Bourlard and Wellekens suggested that performance could be
improved and the need for hand-segmented training data could be elim-
inated by embedding muitilayer perceptron back-propagation training
in an iterative Viterbi-like training loop. This loop could progressively
improve segmentation for DTW or HMM recognizers. Iterative Viterbi
training was not performed because the simpler single-pass training re-
quired roughly 200 hours on a SUN-3 workstation. As noted above,
Bourlard and Wellekens (1 988) also recently proved that recurrent neural
nets could calculate local probabilities required in HMM recognizers.
Sakoe and Is0 (1987) suggested a recognition structure similar to that
of Bourlard and Wellekens (1987) where a multilayer perceptron with de-
lays between input nodes computes local distance scores. They, however,
do not require output nodes of the multilayer perceptron to represent
sub-word units such as phonemes. Instead, a training algorithm is de-
scribed that is similar to the iterative Viterbi-like training loop suggested
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
24
Richard P. Lippmann
by Bourlard and Wellekens (1987) but for continuous input parameters.
No results were presented for this approach.
Burr (1988a) gave results for a recognizer where words were first
aligned based on energy information to provide a fixed 20 input frames of
spectral information. These inputs were fed to nine outputs representing
members of the E-set (“B,C,D,E,G,P,T,V,Z). This recognizer was trained
and tested using 180 tokens from one talker. Results were nearly perfect
when the initial parts of these words were oversampled.
Huang and Lippmann demonstrated how a second-stage of analysis
using a multilayer perceptron could decrease the error rate of an HMM
recognizer (Huang and Lippmann 1988). The Viterbi backtraces from an
HMM recognizer were used to segment input speech frames and average
HMM log probability scores for segments were provided as inputs to
single- and multilayer perceptrons. Performance was evaluated using
the letters “B,D,G” spoken by the 16 talkers in the TI alpha-digit data
base. Ten training tokens per letter were used to train the HMM and
neural net recognizer for each talker and the 16 other tokens were used
for testing. Best performance was provided by a single-layer perceptron
which almost halved the error rate. The error rate dropped from 7.2%
errors with the HMM recognizer alone to 3.8% errors with the neural net
postprocessor.
LOCAL ALLOPHONE DISTANCE SCORES
I
HIDDENNODES
I
CONTEXT
CURRENT
FRAME
CONTEXT
Figure 6: A feed-forward multilayer perceptron that was used to compute allo-
phone distance scores for a DTW recognizer.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
25
Figure 7 A recurrent neural net called a Viterbi net that performs the calcula-
tions required in an HMM Viterbi decoder.
7.2 A Neural Net Architecture to Implement a Viterbi Decoder.
Lippmann and Gold (1987) described a neural-net architecture called a
Viterbi net that could be used to implement the Viterbi decoder used
in many continuous observation HMM recognizers using analog VLSI
techniques. This net is shown in figure 7. Nodes represented by open
triangles correspond to nodes in a left-to-right HMM word model. Each
of these triangles represents a threshold-logic node followed by a fixed
delay. Small subnets in the upper part of the figure select the maximum
of two inputs as described in (Lippmann et al. 1987) and subnets in the
lower part sum all inputs. A temporal sequence of input vectors is pre-
sented at the input and the output is proportional to the log probability
calculated by a Viterbi decoder. The structure of the Viterbi net illustrates
how neural net components can be integrated to design a complex net
which performs the calculations required by an important conventional
algorithm.
The Viterbi net differs from the Viterbi decoding algorithm normally
implemented in software and was thus evaluated using 4000 word to-
kens from the 9-talker 35-word Lincoln Stress-Style speech data base.
Connection strengths in Viterbi nets with 15 internal nodes (one node
per HMM model state) were adjusted based on parameter estimates ob-
tained from the forward-backward algorithm. Inputs consisted of 12 me1
cepstra and 13 differential me1 cepstra that were updated every 10 msec.
Performance was good and almost identical to that of current Robust
HMM isolated-word recognizers (Lippmann and Gold 1987). The error
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
26
Richard I? Lippmann
rate was 0.56% or only 23 out of 4095 tokens wrong. One advantage an
analog implementation of this net would have over digital approaches
is that the frame rate could be increased to provide improved temporal
resolution without requiring higher clock rates.
8 Other Nets for Pattern Sequence Recognition
In addition to the neural net models described above, other nets moti-
vated primarily by psychological and physiological findings and by past
work on associative memories have been proposed for speech recognition
and pattern sequence recognition. Although some of these nets represent
new approaches to the problem of pattern sequence recognition, few have
been integrated into speech recognizers and none have been evaluated
using large speech data bases.
8.1 Psychological Neural Net Models of Speech Perception. Three
neural net models have been proposed which are primarily psychological
models of speech perception (Elman and McClelland 1986; MacKay 1987;
Marslen-Wilson 1987; Rumelhart et al. 1986b). The COHORT model de-
veloped by Marslen-Wilson (1987) assumes a left-to-right real-time acous-
tic phonetic analysis of speech as in current recognizers. It accounts for
many psychophysical results in speech recognition such as the existence
of a time when a word becomes unambiguously recognized (recogni-
tion point), the word frequency effect, and recognition of contextually
inappropriate words. This model, however, is descriptive and is not
expressed as a computational model.
Hand crafted versions of the TRACE and Interactive Activation mod-
els developed by Elman, McClelland, Rumelhart, and co-workers were
tested with small speech data bases (Elman and McClelland 1986; Rumel-
hart et al. 1986b). These models are based on neuron-like nodes, include
both feed-forward and feed-back connections, use nodes with multiplica-
tive operations, and emphasizes the benefits that can be obtained by us-
ing co-articulation information to aid in word recognition. These models
are impractical because the problems of time alignment and training are
not addressed and the entire network must be copied on every new time
step. The Node Structure Theory developed by MacKay (1987) is a qual-
itative neural theory of speech recognition and production. It is similar
in many ways to the above models, but considers problems related to
talking rate, stuttering, internal speech, and rhythm.
8.2 Physiological Models For Temporal Pattern Recognition. Neu-
ral net approaches motivated primarily by physiological and behavioral
results have also been proposed to perform some component of the time
alignment task (Cohen et al. 1987; Dehaene et al. 1987; Wong and Chen
1986). Wong and Chen (1986) and Dehaene et al. (1987) describe similar
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
27
models that have been tested with a small amount of speech data. These
models include neurons with shunting or multiplicative nodes similar
to those that have been proposed in the retina to compute direction of
motion (Poggio and Koch 1987). Three neurons can be grouped to form
a ”synaptic triad” that can be used to recognize two component pattern
sequences. This triad will have a strong output only if the modulator
input goes ”high” and then, a short time later, the primary input goes
”high.”
Synaptic triads can be arranged in sequences and in hierarchies to rec-
ognize features, allophones and words (Wong and Chen 1986). In limited
tests, hand crafted networks could recognize a small set of words spo-
ken by one talker (Wong and Chen 1986). More interesting is a proposed
technique for training such networks without supervision (Dehaene et al.
1987). If effective, this could make use of the large amount of unlabeled
speech data that is available and lead to automatic creation of sub-word
models. Further elaboration is necessary to describe how networks with
synaptic triads could be trained and used in a recognizer.
Cohen and Grossberg proposed a network called a masking field that
has not yet been tested with speech input (Cohen and Grossberg 1987).
CAT
TAC
MASKING FIELD
SHORT-TERM
(Only One Node ”High”)
INPUT
Figure 8: A model called a masking field that can be used to detect pattern
sequences.
~
~~
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
28
Richard I? Lippmann
This network is shown in figure 8. Inputs are applied to the bottom sub-
net which is similar to a feature map net (Kohonen et al. 1984). Typically,
only one node in this subnet has a “high output at any time. Subnet
node outputs feed short-term storage nodes whose outputs decay slowly
over time. Different input pattern sequences thus lead to different ampli-
tude patterns in short term storage. For example the input C-A-T sam-
pled at the end of the word will yield an intensity pattern in short-term
storage with node C low, node A intermediate, and node T high. The
input T-A-C will yield a pattern with node C high, node A intermediate,
and node T low. These intensity patterns are weighted and fed to nodes
in a masking field with weights adjusted to detect different patterns.
The masking field is designed such that all nodes compete to be active
and nodes representing longer patterns inhibit nodes representing shorter
patterns. This approach can recognize short isolated pattern sequences
but has difficulty recognizing patterns with repeated sub-sequences be-
cause nodes in short-term storage corresponding to those sub-sequences
can become saturated. Further elaboration is necessary to describe how
masking fields should be integrated into a full recognizer. Other recent
studies (Jordan 1986; Stornetta et al. 1988; Tattersall et al. 1988) have also
proposed using slowly-decaying nodes as short-term storage to provide
history useful for pattern recognition and pattern sequence generation.
8.3 Sequential Associative Memories. A final approach to pattern
sequence recognition is to build a sequential associative memory for
pattern sequences as described in (Amit 1988; Buhmann and Schulten
1988; Hecht-Nielsen 1987; Kleinfield 1986; Sompolinsky and Kanter 1986).
These nets extend past work on associative memories by Hopfield and
Little (Hopfield 1982; Little 1974) to the case where pattern sequences
instead of static patterns can be restored. Recognition in this approach
corresponds to the net settling into a desired sequence of stable states,
one after the other, when driven by an input temporal pattern sequence.
Dynamic associative memory models developed by Amit, Kleinfield,
Sompolinsky, and Kanter (Amit 1988; Kleinfield 1986; Sompolinsky and
Kanter 1986) use long and short delays on links to generate and recognize
pattern sequences. Links with short delays mutually excite a small set
of nodes to produce stable states. Links with long delays excite nodes
in the next expected stable state. Transitions between states thus oc-
cur at predetermined times that depend on the delays in the links. A
net developed by Buhmann and Schulten (1988) uses probabilistic nodes
to produce sequencing behavior similar to that produced by a Markov
chain. Transitions in this net occur stochastically but at some average
rate. A final net described by Hecht-Nielsen (1987) is a modified version
of Grossberg’s avalanche net (Grossberg 1988). The input to this net is
similar in structure to Kohonen’s feature map. It differs in that nodes
have different rise and fall time constants and overall network activity is
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
29
controlled such that only the outputs of a few nodes are “high” at any
time.
A few relatively small simulations have been performed to explore
the behavior of the sequential associative memories. Simulations have
demonstrated that these nets can complete pattern sequences given the
first element of a sequence (Buhmann and Schulten 1988) and also per-
form such functions as counting the number of input patterns presented
to a net (Amit 1988). Although this approach is theoretically very inter-
esting and may be a good model of some neural processing, no tests have
been performed with speech data. In addition, further work is necessary
to develop training procedures and useful decoding strategies that could
be applied in a complete speech recognizer.
9 Summary of Past Research
The performance of current speech recognizers is far below that of hu-
mans. Neural nets offer the potential of providing massive parallelism,
adaptation, and new algorithmic approaches to speech recognition prob-
lems. Researchers are investigating:
1. New physiological-based front ends,
2. Neural net classifiers for static speech input patterns,
3. Neural nets designed specifically to classify temporal pattern se-
quences,
4. Combined recognizers that integrate neural net and conventional
recognition approaches,
5. Neural net architectures that implement conventional algorithms,
and
6. VLSI hardware neural nets that implement both neural net and
conventional algorithms.
Physiological front ends have provided improved recognition accu-
racy in noise (Ghitza 1988; Hunt and LefPbvre 1988) and a cochlea filter-
bank that could be used in these front ends has been implemented us-
ing micro-power VLSI techniques (Lyon and Mead 1988). Many nets
can compute the complex likelihood functions required by continuous-
distribution recognizers and perform the vector quantization required by
discrete-observation recognizers. Kohonen’s feature map algorithm (KO-
honen et al. 1984) has been used successfully to vector quantize speech
and preliminary VLSI hardware versions of this net have been built
(Mann et al. 1988).
Multilayer perceptron networks with delays have provided excellent
discrimination between small sets of difficult-to-discriminate speech in-
puts (Kammerer and Kupper 1988; Lang and Hinton 1988; Peeling and
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
30
Richard P. Lippmann
Moore 1987; Waibel et al. 1987; Waibel et al. 1988; Watrous 1988). Good
discrimination was provided for a set of 18 consonants in varying pho-
netic contexts (Waibel et al. 1988), similar E-set words such as “B,D,E,V”
(Lang and Hinton 1988), and digits and words from small-vocabularies
(Kammerer and Kupper 1988; Peeling and Moore 1987; Watrous 1988).
In some cases performance was similar to or slightly better than that pro-
vided by a more conventional HMM or DTW recognizer (Kammerer and
Kupper 1988; Lang and Hinton 1988; Peeling and Moore 1987; Waibel et
al. 1987; 1988). In almost all cases, a neural net approach performed as
well as or slightly better than conventional approaches but provided a
parallel architecture that could be used for implementation and a com-
putationally simple and incremental training algorithm.
Approaches to the problem of scaling a network up in size to discrim-
inate between members of a large set have been proposed and demon-
strated (Waibel et al. 1988). For example, a net that classifies 18 conso-
nants accurately was constructed from subnets trained to discriminate
between smaller subsets of these consonants. Algorithms that use com-
bined unsupervised/supervised training and provide high performance
and extremely rapid training have also been demonstrated (Huang and
Lippmann 1988; Kohonen et al. 1988). New training algorithms are un-
der development (Almeida 1987; Jordan 1986; Pineda 1987; Rohwer and
Forrest 1987; Watrous 1988) that can be used with recurrent networks.
Preliminary studies have explored recognizers that combine conven-
tional and neural net approaches. Promising continuous-speech recog-
nition results have been obtained by integrating multilayer perceptrons
into a DTW recognizer (Bourlard and Wellekens 1987) and a multilayer
perceptron post processor has improved the performance of an isolated-
word HMM recognizer (Huang et al. 1988). Neural net architectures
have also been designed for important conventional algorithms. For ex-
ample, recurrent neural net architectures have been developed to imple-
ment the Viterbi decoding algorithm used in many HMM speech rec-
ognizers (Lippmann and Gold 1987) and also to compute local proba-
bilities required in discrete-observation HMM recognizers (Bourlard and
Wellekens 1988).
Many new neural net models have been proposed for recognizing
temporal pattern sequences. Some are based on physiological data and
attempt to model the behavior of biological nets (Dehaene et al. 1987;
Cohen et al. 1987; Wong and Chen 1986) while others attempt to ex-
tend existing auto-associative networks to temporal problems (Amit 1988;
Buhmann and Schulten 1988; Kleinfield 1986; Sompolinsky and Kanter
1986). New learning algorithms and net architectures will, however, be
required to provide the real-time response and automatic learning of in-
ternal word and phrase models required for high-performance continu-
ous speech recognition. This is still a major unsolved important problem
in the field of neural nets.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
31
10 Suggestions for Future Work
Further work should emphasize networks that provide rapid response
and could be used with real-time speech input. They must include in-
ternal mechanisms to distinguish speech from background noise and to
determine when a word has been presented. They also must operate with
continuous acoustic input and not require hand marking of test speech
data, long internal delays, or duplication of the network for new inputs.
Short-term research should focus on a task that current recognizers
perform poorly on such as accurate recognition of difficult sets of isolated
words. Such a task wouldn’t require excessive computation resources
or extremely large data bases. A potential initial problem is talker-
independent recognition of difficult E-set words or phonemes as in (Lang
and Hinton 1988; Waibel et al. 1988). Techniques developed using small
difficult vocabularies should be extended to larger vocabularies and con-
tinuous speech as soon as feasible. Efforts should focus on: developing
training algorithms to construct sub-word and word models automati-
cally without excessive supervision, developing better front-end acoustic-
phonetic feature extraction, improving low-level acoustic/phonetic dis-
crimination, integrating temporal sequence information over time, and
developing more rapid training techniques. Researchers should continue
integrating neural net approaches to classification with conventional ap-
proaches to training and scoring. Longer-term research on continuous-
speech recognition must address the problems of developing high-level
speech-understanding systems that can learn and use internal models
of the world. These systems must be able to learn and use syntactic,
semantic, and pragmatic constraints.
Efforts on building neural net VLSI hardware for speech recognition
should also continue. The development of compact real-time speech rec-
ognizers is a major goal of neural net research. Parallel neural-net ar-
chitectures should be designed to perform the computations required
by successful algorithms and then these architectures should be imple-
mented and tested. Recent developments in analog VLSI neural nets
suggest that this approach has the potential to provide the high compu-
tation rates required for both front-end acoustic analysis and high-level
pattern matching.
All future work should take advantage of the many speech data bases
that currently exist and use results obtained with experimental HMM and
DTW recognizers with these data bases as benchmarks. Descriptions of
some common data bases and comments on their availability are in (Pal-
lett 1986; Price et al. 1988). Detailed evaluations using large speech data
bases are necessary to guide research and permit comparisons between al-
ternative approaches. Results obtained on a few locally-recorded speech
samples are often misleading and are not informative to other researchers.
Research should also build on the current state of knowledge in neural
networks, pattern classification theory, statistics, and conventional HMM
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
32
Richard P. Lippmann
and DTW approaches to speech recognition. Researchers should become
familiar with these areas and not duplicate existing work. Introductions
to current HMM and DTW approaches are available in (Dixon and Martin
1979; Lee and Hon 1988; Parsons 1986; Rabiner and Juang 1986; Rabiner
et al. 1978) and introductions to statistics and pattern classification are
available in many books including (Duda and Hart 1973; Fukunaga 1972;
Nilsson 1965).
Acknowledgments
I would like to thank members of Royal Signals and Radar Establishment
including John Bridle and Roger Moore for discussions regarding the
material in this paper. I would also like to thank Bill Huang and Ben
Gold for interesting discussions and Carolyn for her patience.
References
Ackley, D.H., G.E. Hinton, and T.J. Sejnowski. 1985. A Learning Algorithm for
Boltzmann Machines. Cognitive Science 9, 147-160.
Albus, J.S. 1981. Brain, Behavior, and Robotics. BYTE Books.
Almeida, L.B. 1987. A Learning Rule for Asynchronous Perceptrons with Feed-
back in a Combinatorial Environment. In: 1st International Conference on
Neural Networks. IEEE, 11-609.
Alspector, J. and R.B. Allen. 1987. A Neuromorphic VLSI Learning System. In:
Advanced Research in VLSI: Proceedings of the 1987 Stanford Conference,
ed. P Losleben, 313-349. Cambridge: MIT Press.
Amit, D.J. 1988. Neural Networks for Counting Chimes. Proceedings National
Academy of Science, U S A 85, 2141-2145.
Anderson, S., J. Merrill, and R. Port. 1988. Dynamic Speech Categorization With
Recurrent Networks. Technical Report 258, Department of Linguistics and
Department of Computer Science, Indiana University.
Averbuch, A., L. Bahl, and R. Bakis. 1987. Experiments with the Tangora 20,000
Word Speech Recognizer. In: Proceedings IEEE International Conference on
Acoustics Speech and Signal Processing, Dallax, TX, 701-704.
Bahl, L.R., P.F. Brown, P.V. De Souza, and R.L. Mercer. 1988. Modeling Acoustic
Sequences of Continuous Parameters. In: Proceedings IEEE International
Conference on Acoustics, Speech and Signal Processing, New York, NY, 40-
43.
Baldi, P. and K. Hornik. 1988. Neural Networks and Principal Component
Analysis: Learning from Examples Without Local Minima. Neural Networks
2, 53-58.
Beet, S.W., H.E.G. Powrie, R.K. Moore, and M.J. Tomlinson. 1988. Improved
Speech Recognition Using a Reduced Auditory Representation. In: Pro-
ceedings IEEE International Conference on Acoustics, Speech and Signal
Processing, New York, NY, 75-78.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
33
Bengio, Y. and R. De Mori. 1988. Use of Neural Networks for the Recognition
of Place of Articulation. In: Proceedings IEEE International Conference on
Acoustics, Speech and Signal Processing, New York, NY, 103-106.
Bourlard, H. and Y. Kamp. 1988. Auto-Association by Multilayer Perceptrons
and Singular Value Decomposition. Biological Cybernetics 59, 291-294.
Bourlard, H. and C.J. Wellekens. 1988. Links Between Markov Models and Mul-
tilayer Perceptrons. Technical Report Manuscript M-263, Phillips Research
Laboratory, Brussels, Belgium.
. 1987. Speech Pattern Discrimination and Multilayer Perceptrons. Technical
Report Manuscript M-211, Phillips Research Laboratory, Brussels, Belgium.
Scheduled to appear in the December issue of Computer, Speech and Language.
Bridle, J. 1988. Neural Network Experience at the RSRE Speech Research Unit.
ATR Workshop on Neural Networks and Parallel Distributed Processing,
Osaka, Japan.
Broomhead, D.S. and D. Lowe. 1988. Radial Basis Functions, multi-variable func-
tional interpolation and adaptive networks. Technical Report RSRE Memoran-
dum No. 4148, Royal Speech and Radar Establishment, Malvern, Worcester,
Great Britain.
Buhmann, J. and K. Schulten. 1988. Noise-Driven Temporal Association in
Neural Networks. Europhysics Letters 4, 120.5-1209.
Burr, D.J. 1988a. Experiments on Neural Net Recognition of Spoken and Written
Text. In: IEEE Transactions on Acoustics, Speech and Signal Processing, 36,
1162-1168.
. 1988b. Speech Recognition Experiments with Perceptrons. In: Neural
Information Processing Systems, ed. D. Anderson, 144-1.53. New York:
American Institute of Physics.
Burton, D.K., J.E. Shore, and J.T. Buck. 1985. Isolated-Word Speech Recognition
Using Multisection Vector Quantization Codebooks. In: IEEE Transactions
on Acoustics, Speech and Signal Processing, ASSP-33, 837-849.
Cohen, M. and S. Grossberg. 1987. Masking fields: A Massively Parallel Neural
Architecture for learning, recognizing, and predicting multiple groupings of
patterned data. Applied Optics 26, 1866-1891.
Cohen, M.A., S. Grossberg, and D. Stork. 1987. Recent Developments in a Neu-
ral Model of Real-Time Speech Analysis and Synthesis. In: 1st International
Conference on Neural Networks, IEEE.
Cowan, J.D. and D.H. Sharp. 1988. Neural Nets and Artificial Intelligence.
Daedalus 117, 85-121.
Cybenko, G. 1988. Continuous Valued Neural Networks with Two Hidden Layers are
SufFcient. Technical Report, Department of Computer Science, Tufts Univer-
sity.
Dehaene, S., J. Changeux, and J. Nadal. 1987. Neural Networks that Learn
Temporal Sequences by Selection. Proceedings National Academy Science, USA,
Biophysics 84, 2727-2713.
Deng, Li and C. Daniel Geisler. 1987. A Composite Auditory Model for Process-
ing Speech Sounds. Journal of the Acoustical Society of America 82:6,2001-2012.
Dixon, N.R. and T.B. Martin. 1979. Automatic Speech and Speaker Recognition.
New York IEEE Press.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
34
Richard P. Lippmann
Doddington, G.R. and T.B. Schalk. 1981. Speech Recognition: Turning Theory
into Practice. IEEE Spectrum, 2&32.
Duda, R.O. and P.E. Hart. 1973. Pattern Classification and Scene Analysis. New
York John-Wiley & Sons.
Elman, J.L. 1988. Finding Structure in Time. CRL Technical Report 8801, Univer-
sity of California, San Diego, CA.
Elman, J.L. and J.L. McClelland. 1986. Exploiting Lawful Variability in the
Speech Wave. In: Invariance and Variability in Speech Processes, eds.
J.S. Perkell and D.H. Klatt. New Jersey: Lawrence Erlbaum.
Elman, J.L. and D. Zipser. 1987. Learning the Hidden Structure of Speech. ICS
Report 8701, Institute for Cognitive Science, University of California, San
Diego, La Jolla, CA.
Fallside, F., T.D. Harrison, R.W. Prager, and A.J.R. Robinson. 1988. A Compari-
son of Three Connectionist Models for Phoneme Recognition in Continuous
Speech. ATR Workshop on Neural Networks and Parallel Distributed Pro-
cessing, Osaka, Japan.
Fukunaga, K. 1972. Introduction to Statistical Pattern Recognition. New York:
Academic Press.
Ghitza, 0. 1988. Auditory Neural Feedback as a Basis for Speech Processing. In:
Proceedings IEEE International Conference on Acoustics Speech and Signal
Processing, New York, NY, 91-94.
Gold, 8. 1988. A Neural Network for Isolated Word Recognition. In: Proceed-
ings IEEE International Conference on Acoustics Speech and Signal Process-
ing, New York, NY, 44-47.
Greenberg, S. 1988a. The Ear as a Speech Analyzer. Journal of Phonetics 16,
139-149.
. 1988b. Special Issue on “Representation of Speech in the Auditory
Periphery.” Journal of Phonetics 16.
Grossberg, S. 1988. Nonlinear Neural Networks: Principles, Mechanisms, and
Architectures. Neural Networks 1, 17-61.
Hanson, S.J. and D.J. Burr. 1987. Knowledge Representation in Connectionist Net-
works. Technical Report, Bell Communications Research, Morristown, New
Jersey.
Harrison, T.D. and F. Fallside. 1988. A Connectionist Structure for Phoneme Recog-
nition. Technical Report CUED/F-INFENG/TR.15, Cambridge University
Engineering Department.
Hecht-Nielsen, R. 1987. Nearest Matched Filter Classification of Spatiotemporal
Patterns. Applied Optics 26, 1892-1899.
Hinton, G.E. 1987. Connectionist Learning Procedures. Technical Report CMU-
CS-87-115, Carnegie Mellon University, Computer Science Department.
Homma, T., L.E. Atlas, and R.J. Marks. 1988. An Artificial Neural Network for
Spatio-Temporal Bipolar Patterns: Application to Phoneme Classification.
In: Neural Information Processing Systems, ed. D. Anderson, 31-40. New
York: American Institute of Physics.
Hopfield, J.J. 1982. Neural Networks and Physical Systems with Emergent Col-
lective Computational Abilities. Proceedings of the National Academy of Sci-
ences, U S A 79, 2554-2558.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
35
Huang, W.M. and R.P. Lippmann. 1988. Neural Net and Traditional Classifiers.
In: Neural Information Processing Systems, ed. D. Anderson, 387-396. New
York: American Institute of Physics.
Huang, W.M., R.P. Lippmann, T. Nguyen. 1988. Neural Nets for Speech Recog-
nition. In: Conference of the Acoustical Society of America, Seattle WA.
Hunt, M.J. and C. Lefebvre. 1988. Speaker Dependent and Independent Speech
Recognition Experiments With an Auditory Model. In: Proceedings IEEE
International Conference on Acoustics, Speech and Signal Processing 1, New
York, 215-218.
Irino, T. and H. Kawahara. 1988. A Study on the Speaker Independent Feature
Extraction of Japanese Vowels by Neural Networks. ATR Workshop on
Neural Networks and Parallel Distributed Processing, Osaka, Japan.
Jordan, M.I. 1986. Serial Order: A Parallel Distributed Processing Approach. Insti-
tute for Cognitive Science Report 8604, University of California, San Diego.
Kamm, C., T. Landauer, and S. Singhal. 1988. Training an Adaptive Network
to Spot Demisyllables in Continuous Speech. ATR Workshop on Neural
Networks and Parallel Distributed Processing, Osaka, Japan.
Kammerer, B. and W. Kupper. 1988. Experiments for Isolated-Word Recognition
with Single and Multi-Layer Perceptrons, Abstracts of 1st Annual INNS
Meeting, Boston. Neural Netuiorks 1, 302.
Kirkpatrick, S., C.D. Gelatt, and M.P. Vecchi. 1983. Optimization by Simulated
Annealing. Science 229, 671-679.
Klatt, K.H. 1986. The Problem of Variability In Speech Recognition and Models
of Speech Perception. In: Invariance and Variability in Speech Processes,
eds. J.S. Perkell and D.H. Klatt, 300-324. New Jersey: Lawrence Erlbaum.
Kleinfield, D. 1986. Sequential State Generation by Model Neural Networks.
Proceedings National Academy Science, USA, Biophysics 83, 9469-9473.
Kohonen, T. 1988. An Introduction to Neural Computing. Neural Networks 1,
3-16.
Kohonen, T. 1984. Self-organization and Associative Memory. Berlin: Springer-
Verlag.
Kohonen, T., G. Barna, and R. Chrisley. 1988. Statistical Pattern Recognition
with Neural Networks: Benchmarking Studies. In: IEEE Annual Interna-
tional Conference on Neural Networks, San Diego, July.
Kohonen, T., K. Makisara, and T. Saramaki. 1984. Phonotopic Maps – In-
sightful Representation of Phonological Features for Speech Recognition.
In: IEEE Proceedings of the 7th International Conference on Pattern Recog-
nition.
Lang, K.J. and G.E. Hinton. 1988. The Development of the Time-Delay Neural Net-
work Architecture for Speech Recognition. Technical Report CMU-CS-88-152,
Carnegie-Mellon University.
Lapedes, A. and R. Farber. 1988. How Neural Nets Work. In: Neural Informa-
tion Processing Systems, ed. D. Anderson, 442456. New York: American
Institute of Physics.
Lee, Kai-Fu and Hsiao-Wuen Hon. 1988. Large-Vocabulary Speaker-Indepen-
dent Continuous Speech Recognition Using HMM. In: Proceedings IEEE
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
36
Richard P. Lippmann
International Conference on Acoustics, Speech and Signal Processing 1,123-
126.
Lee, Y.C., G. Doolen, H.H. Chen, G.Z. Sun, T. Maxwell, H.Y. Lee, C.L. Giles.
1986. Machine Learning Using a Higher Order Correlation Network. Physica
D, 276306.
Leung, H.C. and V.W. Zue. 1988. Some Phonetic Recognition Experiments
Using Artificial Neural Nets. In: Proceedings IEEE International Conference
on Acoustics, Speech and Signal Processing 1.
Lippmann, R.P., B. Gold, and M.L. Malpass. 1987. A Comparison of Hamming
and Hopfield Neural Nets for Pattern Classification. Technical Report TR-769,
MIT Lincoln Lab.
Lippmann, R.P. 1987. An Introduction to Computing with Neural Nets. IEEE
A S S P Magazine 42,622.
Lippmann, R.P. and Ben Gold. 1987. Neural Classifiers Useful for Speech
Recognition. In: 1 st International Conference on Neural Networks, IEEE,
IV-417.
Little, W.A. 1974. The Existence of Persistent States in the Brain. Mathematical
Biosciences 19, 101-120.
Lyon, R.F. and C. Mead. 1988. An Analog Electronic Cochlea. IEEE Transactions
on Acoustics, Speech and Signal Processing 36, 1119-1134.
MacKay, D.G. 1987. The Organization of Perception and Action, New York
Springer Verlag.
Mann, J., J. Raffel, R. Lippmann, and B. Berger. 1988. A Self-organizing Neural
Net Chip. Neural Networks for Computing Conference, Snowbird, Utah.
Marslen-Wilson, W.D. 1987. Functional Parallelism in Spoken Word-Recognition.
In: Spoken Word Recognition, eds. U.H. Frauenfelder and L.K. Tyler. Cam-
bridge, MA: MIT Press.
McDermott, E. and S. Katagiri. 1988. Phoneme Recognition Using Kohonen’s
Learning Vector Quantization. ATR Workshop on Neural Networks and
Parallel Distributed Processing, Osaka, Japan.
Moody, J. 1988. Speedy Alternatives to Back Propagation. Neural Networks for
Computing Conference, Snowbird, Utah.
Moody, J. and C. Darken. 1988. Learning with Localized Receptive Fields. Techni-
cal Report YALEU/DCS/RR-649, Yale Computer Science Department, New
Haven, CT.
Naylor, J. and K.P. Li. 1988. Analysis of a Neural Network Algorithm for Vector
Quantization of Speech Parameters, Abstracts of 1st Annual INNS Meeting,
Boston. Neural Networks 1, 310.
Nilsson, Nils J. 1965. Learning Machines. New York McGraw Hill.
Niranjan, M. and F. Fallside. 1988. Neural Networks and Radial Basis Functions
in Classifying Static Speech Patterns. Technical Report CUED/F-INFENG/TR
22, Cambridge University Engineering Department.
Omohundro, S.M. 1987. Efficient Algorithms with Neural Network Behavior.
Complex Systems 1, 273347.
Pallett, D.S. 1986. A PCM/VCR Speech Database Exchange Format. In: Pro-
ceedings IEEE International Conference on Acoustics, Speech and Signal
Processing, Tokyo, Japan, 31 7-320.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Review of Neural Networks for Speech Recognition
37
Parsons, T. 1986. Voice and Speech Processing. New York McGraw-Hill.
Paul, D.B. 1987. A Speaker-Stress Resistant HMM Isolated Word Recognizer.
ICASSP 87, 713-716.
Peeling, S.M. and R.K. Moore. 1987. Experiments in Isolated Digit Recognition
Using the Multi-Layer Perceptron. Technical Report 4073, Royal Speech and
Radar Establishment, Malvern, Worcester, Great Britain.
Peterson, Gordon E. and Harold L. Barney. 1952. Control Methods Used in a
Study of Vowels, The Journal of the Acoustical Society of America 249, 175-84.
Pineda, F.J. 1987. Generalization of Back-Propagation to Recurrent Neural Net-
works. Physical Review Letters 59, 2229-2232.
Poggio, T. and C. Koch. 1987. Synapses that Compute Motion. Scientific Amer-
ican 256, 46-52.
Prager, R.W. and F. Fallside. 1987. A Comparison of the Boltzmann Machine
and the Back Propagation Network as Recognizers of Static Speech Patterns.
Computer Speech and Language 2,179-183.
Prager, R.W., T.D. Harrison, and F. Fallside. 1986. Boltzmann Machines for
Speech Recognition. Computer Speech and Language 1, 2-27.
Price, P., W.M. Fisher, J. Bernstein, D.S. Pallett. 1988. The DARPA 1000-Word
Resource Management Database for Continuous Speech Recognition. In:
Proceedings IEEE International Conference on Acoustics, Speech and Signal
Processing, New York 1, 651454.
Rabiner, L.R. and B.H. Juang. 1986. An Introduction to Hidden Markov Models.
IEEE A S S P Magazine 3:1, 4-16.
Rabiner, Lawrence R. and Ronald W. Schafer. 1978. Digital Processing of Speech.
New Jersey: Prentice-Hall.
Raffel, J., J. Mann, R. Berger, A. Soares, and S. Gilbert. 1987. A Generic Archi-
tecture for Wafer-Scale Neuromorphic Systems. In: 1st International Con-
ference on Neural Networks, IEEE.
Robinson, A.J. and F. Fallside. 1988a. A Dynamic Connectionist Model for
Phoneme Recognition. nEuro ’88, Paris, France.
. 1988b. Static and Dynamic Error Propagation Networks with Appli-
cation to Speech Coding. In: Neural Information Processing Systems, ed.
D. Anderson, 632-641. New York: American Institute of Physics.
Rohwer, R. and B. Forrest. 1987. Training Time-Dependencies in Neural Net-
works. In: 1st International Conference on Neural Networks, IEEE, 11-701.
Rossen, M.L., L.T. Niles, G.N. Tajchman, M.A. Bush, J.A. Anderson, and S.E.
Blumstein. 1988. A Connectionist Model for Consonant-vowel Syllable
Recognition. In: Proceedings IEEE International Conference on Acoustics,
Speech and Signal Processing, New York, NY, 59-66.
Rumelhart, D.E., G.E. Hinton, and R.J. Williams. 1986a. Interactive Processes
in Speech Perception: The TRACE Model. In: Parallel Distributed Process-
ing: Vol. 2, Psychological and Biological Models, eds. D.E. Rumelhart and
J.L. McClelland. Cambridge, MA: MIT Press.
. 1986b. Learning Internal Representations by Error Propagation. In:
Parallel Distributed Processing: Vol. 1, Foundations. Cambridge, MA: MIT
Press.
Sakoe, H. and K. Iso. 1987. Dynamic Neural Network – A New Speech Recognition
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
38
Richard P. Lippmann
Model Based on Dynamic Programming and Neural Network. IEICE Technical
Report 87, NEC Corporation.
Seneff, S. 1988. A Joint Synchrony/Mean-Rate Model of Auditory Speech Pro-
cessing. Journal of Phonetics 16, 55-76.
Servan-Schreiber, D., A. Cleeremans, and J.L. McClellan. 1988. Encoding Sequen-
tial Structure in Simple Recurrent Networks. Technical Report CMU-CS-88-183,
Carnegie Mellon University.
Shamma, S. 1988. The Acoustic Features of Speech Sounds in a Model of Au-
ditory Processing: Vowels and Voiceless Fricatives. Journal of Phonetics 16,
77-91.
Shore, J.E. and D.K. Burton. 1983. Discrete Utterance Speech Recognition With-
out Time Alignment. I E E E Transactions on Information Theory lT-29,473-491.
Sompolinsky, H. and I. Kanter. 1986. Temporal Association in Asymmetrical
Neural Networks. Physical Review Letters 57, 2861-2864.
Stornetta, W.S., T. Hogg, and B.A. Huberman. 1988. A Dynamical Approach to
Temporal Pattern Processing. In: Neural Information Processing Systems,
ed. D. Anderson, 750-759. New York: American Institute of Physics.
Tank, D. and J.J. Hopfield. 1987. Concentrating Information in Time: Analog
Neural Networks with Applications to Speech Recognition Problems. In:
1st International Conference on Neural Networks, IEEE.
Tattersall, G.D., P.W. Linford, and R. Linggard. 1988. Neural Arrays for Speech
Recognition. British Telecommunications Technology Journal 6 , 140-163.
Unnikrishnan, K.P., J.J. Hopfield, and D.W. Tank. 1988. Learning Time-delayed
Connections in a Speech Recognition Circuit. Neural Networks for Com-
puting Conference, Snowbird, Utah.
Waibel, Alex, T. Hanazawa, G. Hinton, K. Shikano, and K. Lang. 1987. Phoneme
Recognition Using Time-Delay Neural Networks. Technical Report TR-1-006,
ATR Interpreting Telephony Research Laboratories, Japan. Scheduled to ap-
l E E E Transactions on Acoustics Speech
pear in March 1989 issue of
and Signal Processing.
Waibel, Alex, H. Sawai, and K. Shikano. 1988. Modularity and Scaling in Large
Phonemic Neural Nets. Technical Report TR-1-0034, ATR Interpreting Tele-
phony Research Laboratories, Japan.
Watrous, R.L. 1988. Speech Recognition Using Connectionist Networks. Ph.D thesis,
University of Pennsylvania.
. 1986. Learning Algorithms for Connectionist Networks: Applied Gradient
Methods of Nonlinear Optimization. Technical Report MS-CIS-87-51, Linc Lab
72, University of Pennsylvania.
Watrous, R.L. and Lokendra Shastri. 1987. Learning Phonetic Features using
Connectionist Networks: An Experiment in Speech Recognition. In: 1st
International Conference on Neural Networks, IEEE, IV-381.
Wong, M.K. and H.W. Chen. 1986. Toward a Massively Parallel System for
Word Recognition. In: Proceedings IEEE International Conference on Acous-
tics Speech and Signal Processing, 37.4.1-37.4.4.
~
Received 10 November; accepted 14 November 1988
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
–
p
d
/
l
f
/
/
/
/
/
1
1
1
8
1
1
8
1
1
n
e
c
o
1
9
8
9
1
1
1
p
d
.
.
.
.
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3