The Man and Machine
Robot Orchestra at Logos
Laura Maes,∗† Godfried-Willem
Raes,∗† and Troy Rogers∗∗
∗University College Ghent
音乐系
Hoogpoort 64, 9000 Ghent, 比利时
†Ghent University
Department of Art, 音乐
and Theatre Sciences
Blandijnberg 2, 9000 Ghent, 比利时
laura.maes@hogent.be
godfriedwillem.raes@logosfoundation.org
∗∗University of Virginia
麦金太尔音乐系
112 老卡贝尔厅, P.O. Box 400176
夏洛茨维尔, 弗吉尼亚州 22904-4176 美国
tsr9f@virginia.edu
This article provides an overview of the vari-
ous automata of the Man and Machine robot
orchestra found at the Logos Foundation in Ghent,
比利时 (见图 1). The motivation for their
creation is discussed, as well as the way in which
these automations of existing and new instruments
distinguish themselves from precursors and other
contemporary musical robots. This extensive or-
chestra features over 45 organ-like instruments,
monophonic wind instruments, string instruments,
percussion instruments, and noise generators. 在这个
文章, at least one automaton of each instrument
family is discussed in depth; the design, construc-
的, expressive capabilities, and limitations are
treated; and the various ways in which the automata
are controlled is discussed. Descriptions of six com-
positions that demonstrate the wide usability of the
automata are included. 最后, this article provides
a glance behind the scenes and unveils future plans
for the ensemble. [Editor’s note: video examples
appear in the DVD accompanying this issue.]
the construction of Autosax, an automated acoustic
saxophone, marked a shift towards a new era: 这
design and development of music robots. 超过 45
robots have been realized. Together they form an
impressive orchestra.
The motivation for Logos’s interest and in-
volvement in robotics stems from the view that
loudspeakers as sound sources (a necessity for all
electronically generated sound) are virtualizations
of an acoustic reality. 所以, they tend to under-
mine the raison d’ ˆetre of concerts as social rituals.
The dissociation between musicians’ gestures and
sonic results makes the rhetoric so typical of—if not
essential to—live performance nearly impossible.
With automated acoustic instruments, virtualiza-
tion is eschewed in exchange for rich acoustic sound
sources under precise computer control; the cou-
pling between gestures and produced sounds is thus
inherent.
Precursors
The Orchestra’s Origin
The Logos Foundation started in 1968 as a collective
of experimental composers and musicians. 在里面
first two decades of its existence, Logos’s main focus
was on the design and use of analog, digital, 和
hybrid electronic sound generation devices. 在 1990,
电脑音乐杂志, 35:4, PP. 28–48, 冬天 2011
C(西德:2) 2011 麻省理工学院.
The idea of automating musical instruments is
in no way novel. With increased frequency since
around the second half of the 18th century, 这
pursuit of automated musical instruments has
fascinated both instrument builders and musicians.
Until the middle of the 20th century, 几乎全部
musical automata were either purely mechanical or
pneumatic (Kapur 2005). The mechanics used were
离散的: sounds could be programmed to go on or
off at fairly precise timings, but nuances, dynamics,
28
电脑音乐杂志
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
数字 1. The Man and
Machine orchestra at the
Logos Tetrahedron.
and timbral possibilities—and thus the expressive
musical potential of these instruments—were
extremely limited. The advent of electromechanics
and their electronic control possibilities greatly
extended the versatility of automated musical
仪器. Many of the early attempts achieved
only flat approximations of music performed by
人类, but contemporary computer-controlled
instruments can be designed to offer finer control
over musical parameters (例如, 沥青, 等级, 音色,
定时) than humans could ever hope to achieve.
These instruments demand the creation of new
music written specifically to take advantage of their
unique capabilities. The Logos orchestra is situated
within this territory.
The Contemporary Field of Musical Robotics
Contemporary developments in the growing field of
musical robotics fall into several overlapping cate-
gories. Perhaps most familiar to the general public
are industrial anthropomorphic robots, developed as
human companions and service providers that play
music as a way of demonstrating their dexterity and
技术进步. The trumpet-playing
Toyota partner robot is an example (Toyota Motor
公司 2003). 下一个, there are a number of
robots produced specifically as musical automata.
They are also anthropomorphic to varying degrees,
and seek either to replicate the mechanics of hu-
man performance (Solis et al. 2006; Petersen et al.
2009) or to serve as interactive physical agents for
the exploration of human–machine interaction in
improvisational musical contexts (Weinberg and
德里斯科尔 2006). 最后, there are growing num-
bers of automated acoustic instruments created by
composers and sound artists seeking to exploit the
unique capabilities of these machines. The Logos
Man and Machine Ensemble, one of the oldest
robotic orchestras, falls squarely in this category.
Various other artists and collectives are also
active in the same field. Logos’s Player Piano
I builds further on Trimpin’s, with the playing
mechanism similarly placed directly onto the
keyboard, in contrast to the B ¨osendorfer SE and
Yamaha Disklavier where the playing mechanism is
integrated inside the piano (Coenen 1992). Trimpin
originally designed a player piano to salvage the
player-piano music of Conlon Nancarrow, as it is
difficult to maintain mechanical player pianos, 和
Nancarrow’s cardboard piano rolls have a limited
Maes, Raes, and Rogers
29
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
lifespan. Whereas Nancarrow specified only seven
gradations of velocity control (applied to musical
characteristics such as crescendo or intensity) 为了
each half of the keyboard (bass and treble), 在
Trimpin’s player piano each key can be controlled
separately (Raes 1994). In Raes’s version, the exact
height of each solenoid above the piano key can be
adjusted. This adaptation makes it easier to precisely
control the velocity sensitivity.
Trimpin’s work inspired not only Raes’s Player
Piano I: Similar circuits were used in other instru-
ments of the Man and Machine robot orchestra,
such as Harma, QT, Troms, Tubi, Vibi, Simba, Xy,
Rotomoton, and Toypi.
Trimpin and Raes both focus on acoustically pro-
duced sounds and avoid amplified and synthesized
声音 (Louie 2002). Whereas Trimpin’s designs lean
more towards sound art and are often presented in
exhibition environments, Raes’s Man and Machine
ensemble more frequently will be found on the stage
of a concert hall. This is perfectly illustrated by the
fact that both creators have made MIDI-controlled
water valves. Trimpin integrated 100 of these valves
in his installation Liquid Percussion (Trimpin 2011),
in which water drops fall on hand-blown glass ves-
sels. Raes created Dripper, an automaton that can
control not only the frequency, but also the size of
water drops. Raes used this instrument to realize an
act of his music-theatre production TechnoFaustus.
Just like Raes, Trimpin made an automated toy
piano. His sound-work Klavier Nonette groups nine
toy pianos that can play 41 original compositions.
To hear and see them play, the spectator drops a
quarter in a jukebox and dials in the number of
the composition he or she wants to hear (张
2003). Whereas Trimpin makes use of the original
toy piano soundboard, Raes created a new free-
swinging soundboard constructed out of hardened
brass. Both use wooden hammers, but Raes replaced
the keyboard and action with a tubular solenoid
集会. On the outside, Trimpin’s player pianos
look exactly like non-automated player pianos, 和
the polycarbonate plate and visible electronics give
Raes’s Toypi a futuristic look.
Trimpin gave advice for the construction of
a percussion robot and a marimba/bell robot.
Together with a drum robot they form the Karmetik
Machine Orchestra (Karmetik 2010). This collective
of engineers, visual artists, and musicians does not
confine themselves to acoustically produced sounds.
Loudspeakers were integrated in the drum robot to
create an effect like a rotating Leslie speaker, 和
in performance settings the sounds produced by
the robots are amplified. On stage, musicians use
custom-built musical interfaces to interact with
the automata. In contrast to the Man and Machine
orchestra, most of these interfaces take the form of
a musical instrument equipped with sensors.
Jacques R ´emus’s Concertomatique n˚2 is a collec-
tion of eleven mechanic automata and comprises,
除其他外, two organs, percussion instruments,
a string quartet, and machines with ringed pipes
(R ´emus 2011b). Besides Concertomatique n˚2,
R ´emus has also created Carillon n˚3, which consists
的 40 automated tubular bells (R ´emus 2011a) and Les
Pic Verts, a collection of six automated woodblocks
(R ´emus 2011c). In contrast to Raes’s robots, R ´emus’s
carillon and woodblocks are mainly presented as
an installation, whereby the various elements are
spread throughout the space. It is not the performer,
as is the case in the Man and Machine orchestra,
but a visitor who interacts with the automata. 这
performed melodies can be chosen through various
interfaces, ranging from a keyboard or microphone
to R ´emus’s own cam ´era musicale, an interface he
developed that detects the position and movements
of hands and translates those to MIDI commands
(R ´emus 2006).
Christof Schl ¨ager’s Electric Motion Orchestra
does not focus on the automation of existing
musical instruments, but on the creation of new
仪器. Schl ¨ager is inspired by the sound world
of machines and searches for rhythms and timbres
not found in traditional instruments. The orchestra
包含 26 automata that all use elements that
were originally designed for purposes other than
the creation of music, such as doorbells, magnets
from weaving machines, sewing machine motors,
radiator valves, electric staplers, signal horns,
ventilation valves, servomotors, and record player
电机 (Schl ¨ager 2010). Small instruments, 例如
Toypi, are not found in Schl ¨ager’s orchestra; all his
instruments have monumental shapes. Both Raes’s
and Schl ¨ager’s orchestras are MIDI-controlled, 但
30
电脑音乐杂志
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
the precision of control in Schl ¨ager’s Electric Motion
Orchestra is less fine.
ensemble, the musicians’ actions have no influence
on the output of the automata.
在 2000 Eric Singer founded the League of Elec-
tronic Musical Urban Robots (LEMUR). This group
of musicians, robotics experts, artists, 和设计-
ers creates MIDI-controlled musical automata,
including a xylophone, shakers, Tibetan singing
bowls, goat-hoof rattles, gamelan, and guitars. 最多
of the automata are acoustic, but some, 例如
the Guitarbot, are electrified. Like the Man and
Machine automata, LEMUR’s robots aim to aug-
ment the capabilities of human performers, not to
replace them. LEMUR’s robots also utilize periph-
eral interface controllers (PICs), microcontrollers
used to receive MIDI commands and to control
the steering of the electromechanical components
(Singer et al. 2004).
Singer has also built instruments for other people,
例如, Pat Metheny has recently travelled the
world with the Orchestrion. On stage, Metheny is
accompanied by over 40 automated instruments,
mostly percussion instruments and automated
guitars. Metheny uses a guitar interface, a keyboard,
or software programs running on his computer
(Chinen 2010) to send MIDI commands to the
various automata.
Universities are a breeding ground for new robotic
instrument builders. Not only do Ajay Kapur’s stu-
dents at the California Institute of the Arts expand
the Karmetic Machine Orchestra with modified
instruments and new robots, new organizations are
also being formed. 在 2007, Troy Rogers, Scott Bar-
吨, and Steven Kemper, three PhD students at the
弗吉尼亚大学, founded Expressive Machines
Musical Instruments (EMMI). They have built two
percussion robots and one monochord robot (EMMI
2011), and they aspire to create a huge orchestra (麦克-
Neill 2008). 在 2010, Troy Rogers worked at the Logos
基础.
Founded by MIT alumnae Christine Southworth
and Leila Hasan, the Ensemble Robot unites artists
和工程师. The ensemble comprises five musical
automata, all utilizing acoustic sources such as
whirlies, pipes, and strings (Southworth 2010). 作为
with the Man and Machine ensemble, the automata
of Ensemble Robot frequently play together with
musicians, but in contrast to the Man and Machine
The underground pop world is also not immune
to robotic charms. Jason Vance, the driving force,
guitarist, and singer of Captured! by Robots, 是
accompanied on stage by a guitar robot, pneumatic
horns, and various percussion robots (Captured! 经过
Robots 2011). The garage rock band The Trons go
one step further: Only robots populate the stage
(The Trons 2011).
设计
This section illustrates the design principles of
various instruments in the Logos Man and Ma-
chine orchestra. The electronics and actuators are
discussed, as well as the frames that hold them.
Principles
The durability, usability, acoustic quality, capabili-
领带, and “readability” of the automata are addressed
in the following paragraphs.
Durability
A well-made acoustic instrument is expected to hold
up to decades or even centuries of regular usage.
In the tradition of quality acoustic instruments,
the instruments of the Man and Machine orchestra
are designed with longevity in mind. Welded steel
frames, over-specified electronic and electrical
成分, and high-performance actuators are
utilized to ensure maximal lifetime and minimal
维护.
Usability
The instruments are designed with the intention
that any composer who possesses a basic knowledge
of sequencing, notation, or other MIDI software,
and who is familiar with the specifics of controlling
the automata (Raes 2010a), will be able to write for
他们.
All of the automata are permanently set up in
Logos’s tetrahedron-shaped concert hall. 虽然
Maes, Raes, and Rogers
31
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
the instruments are sometimes presented at other
venues, they always return to the Logos concert
hall, where they stand set up and ready to be used
with the simple flip of a power switch.
Acoustic Quality
The orchestra is completely acoustic, 因此
joins a long tradition in the construction of musical
automata. Unlike some elements in automated
dance organs (orchestrions), where certain elements
only have a visual function, the Logos automata have
no non-functioning components and no electrical
amplification.
Capabilities
Raes’s point of departure is that his machines
can outperform humans. His intention is not to
replace human performers, but to expand musical
可能性. Most automata can play faster, 和
produce more simultaneous notes, than a human
performer could ever achieve, each with precisely
controlled dynamics. Most of the orchestra’s robots
are tuned to twelve-tone equal temperament. Four
仪器 (Qt, Tubi, Xy, and Puff) are tuned to
equal-tempered quarter tones. Sire, as well as all of
the monophonic wind instruments, can be tuned
with sub-cent precision and can thus be used with
nearly any tuning system.
Readability
The machines are “readable,” meaning that the
audience can visually comprehend them because
they feature as many visible components as possi-
布莱. 此外, extensive design and construction
信息, and even the programming and elec-
tronic schemes of the instruments, are published
with an open-source license on the Logos Web site.
Frames
to weld and shape, is durable, rust-free, 和非-
magnetic, and it is a poor transmitter of acoustic
vibrations (which is important for preventing
unwanted resonances). As the automata are heavy
(up to more than 250 kg for Qt) and regularly travel,
most of the instruments are equipped with sturdy
wheels.
Electronics
PIC microcontrollers are used to control all of
the automata. Several varieties of custom printed
circuit boards (PCBs) have been developed for various
aspects of machine control.
Custom PCBs
On the instruments that utilize solenoids to drive
percussive beaters, depress piano or organ keys, 或者
operate valves or tone holes, custom “pulse/hold”
circuit boards are used. For instruments (例如
pitched and nonpitched percussion instruments)
that require a single pulse to drive the solenoid and
strike percussively, the over-voltage pulse portion
of the board is utilized. The 16-bit timers of the
PIC microcontrollers allow for 27-microsecond
resolution of the pulse durations for each of the
16 solenoids that are “steered” from a single
chip. Lookup tables programmed into the PICs via
MIDI system-exclusive commands ensure that the
received note velocities (from 1–127) will produce
linear gradations of striking forces, from the softest
to the loudest possible for the given instrument
and striking mechanism. For instruments that do
not require velocity control, but instead require
that a note-on activates the solenoid and that a
note-off releases it (such as for organs without
velocity control), the hold circuitry is utilized. 为了
instruments requiring both velocity and duration
控制 (such as the player piano and velocity-
sensitive organs), both the pulse and hold circuitry
are used in combination.
Instruments requiring audio signal generation
All Logos automated instruments are supported by
sturdy welded steel frames. AISI304 stainless steel is
used for its numerous desirable properties. It is easy
for mechanical activation, such as the mono-
phonic winds and the electromagnetically bowed
string instruments, utilize custom boards based on
32
电脑音乐杂志
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
Microchip Technology’s dsPIC microcontroller to
generate the requisite waveforms. All instruments
are equipped with a custom MIDI hub board to
buffer the input and distribute MIDI messages to the
various actuators and lights.
Actuators
A range of solenoid types is used in the orchestra,
carefully chosen according to performance and
longevity characteristics. Tubular push and pull,
dual-coil push–pull, rotary, and pivoting anchor
types are all used, in sizes ranging from the tiny
Lucas Ledex push solenoids used in Toypi to the
large bi-directional slider action August Laukhuff
actuators (capable of 6.3-kg pull force) used in Klung
and So.
There is a strong preference for three-phase
brushless servos whenever speed or position control
is required. These high-performance motors are
precisely controllable and have the desirable charac-
teristics of silent operation and extended life cycle.
Three-phase alternating current motors, operated
with commercial motor controllers, are used to
supply wind to the organs. Large stepper motors are
used to control the pitch of Rotomoton (automated
rototoms), while smaller steppers are used, for in-
姿态, to raise and lower the swells and to open
and close the wind valve on Harmo (an automated
440 赫兹, six-octave harmonium). 小的, brushed
direct current (直流) 电机, typically high-
performance types that have been extracted from
tape recorders, are also used in some automata.
Voice coils remain the audio-rate actuators of
choice for Logos automata. The Sousaphone’s (So’s)
silicone “lips” are actuated at audio and sub-audio
rates by a modified loudspeaker. Compression
drivers are outfitted with appropriate acoustic
impedance converters to drive the other monophonic
wind instruments.
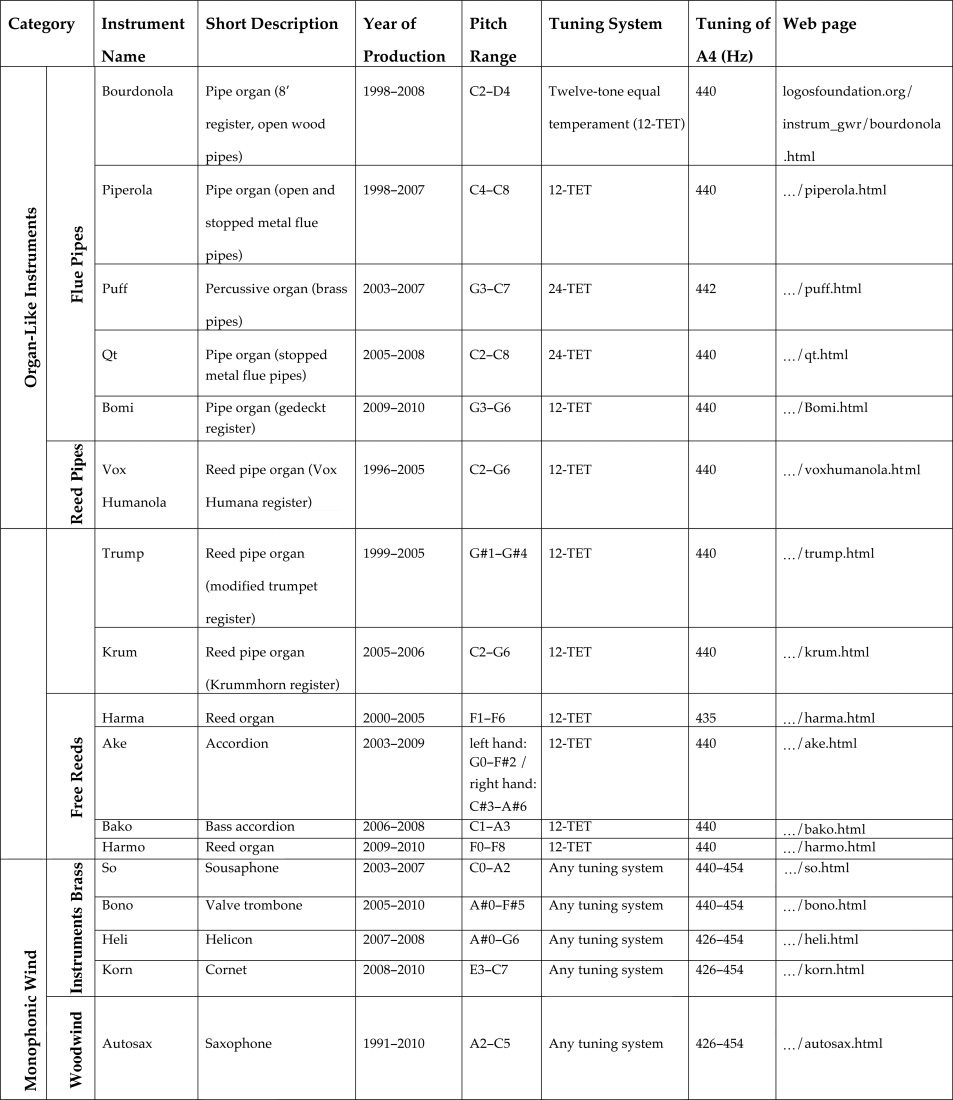
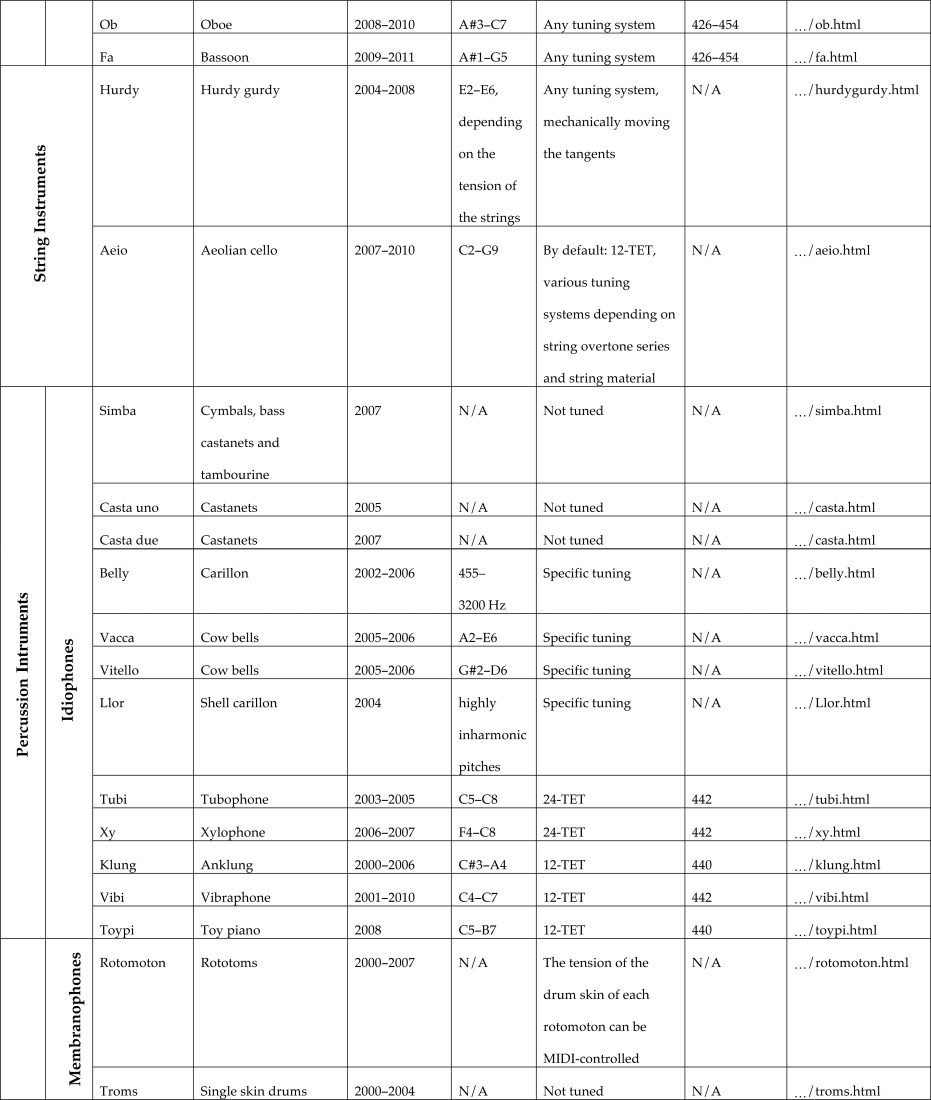
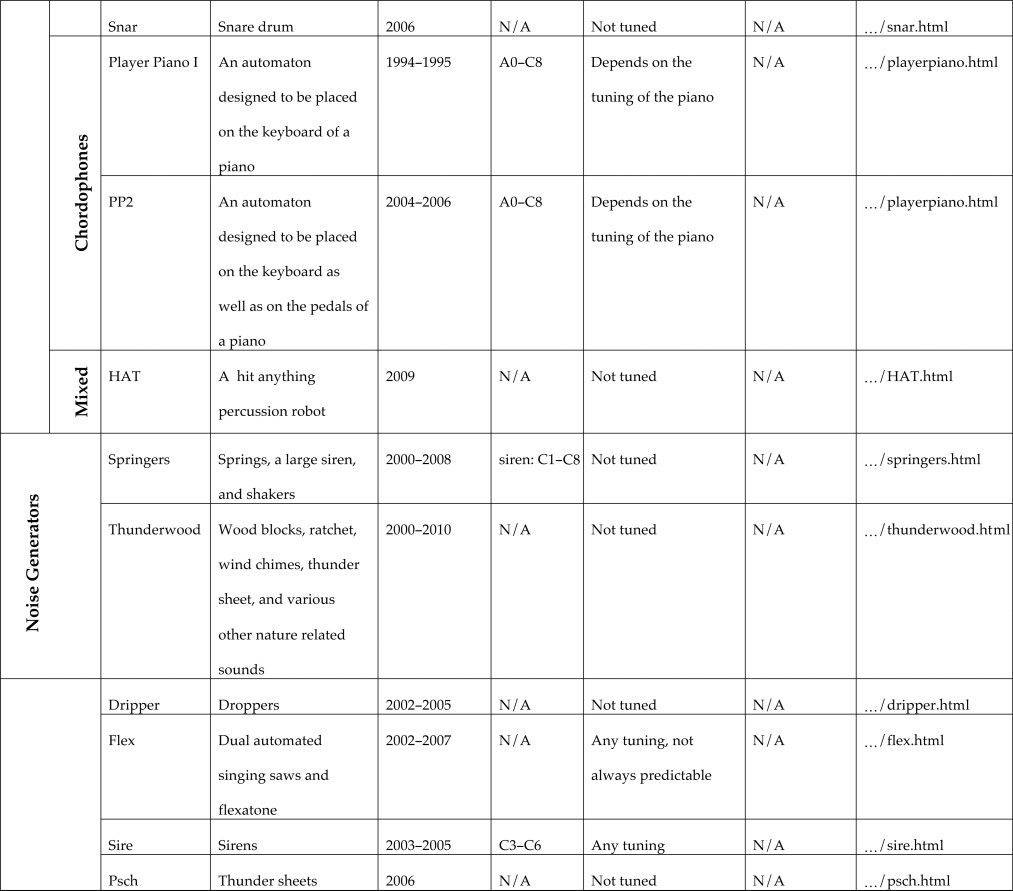
Families
The orchestra is composed of different acous-
tic instrument families: organ-like instruments,
monophonic wind instruments, string instruments,
percussion instruments, and noise generators (看
桌子 1). Although most of these robots are au-
tomations of existing instruments, many of them
offer broader musical possibilities than their manual
equivalents. The following sections provides an
overview of the various robots of the orchestra. 为了
at least one robot from each musical family, 这
设计, 建造, expressive capabilities, 和
limitations will be discussed in detail.
Organ-Like Instruments
The Logos orchestra includes various automated
pipe organs that are equipped with flue and reed
pipes as well as several free reeds. The ambitus of
the flue pipe organs ranges from bass (Bourdonola) 到
soprano (Piperola). Qt, a quarter tone organ, expands
the tuning possibilities of the flue pipe section.
An automated organ with reed pipes (克鲁姆), 一个
automated organ trumpet (Trump), a Vox Humana
(Vox humanola), and a percussive quarter tone organ
(Puff) provide a range of timbral possibilities. 控制
of the wind pressure envelope of each closed wooden
flue pipe is being implemented in the brand-new
automaton Bomi. Two automated accordions—Ake
and Bako (a bass accordion)—and two reed organs—
Harma and his big brother Harmo—constitute the
free reed section.
Puff, A Quarter Tone Percussive Organ
The mechanism of the Puff organ has no equiva-
lent in existing musical instruments. Each of the
84 closed brass pipes of this percussive organ is
articulated by an individual solenoid-driven piston
with a Pyrex glass housing (见图 2). On each
stroke of the solenoid, a precisely controllable puff
of wind is produced. Because of this approach, a fully
polyphonic touch sensitivity is realized.
Because of Puff(西德:3)s extended range in the high treble
and its quarter-tone tuning, it is particularly well
suited for music using spectral harmony. If enough
energy is sent to the solenoids, it is possible to
over-blow the pipes (because closed brass pipes are
用过的, the duodecimo will sound).
Maes, Raes, and Rogers
33
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
桌子 1. Automated Instruments of the Man and Machine Orchestra
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
34
电脑音乐杂志
桌子 1. Continued.
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
Maes, Raes, and Rogers
35
桌子 1. Continued.
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
Although steady notes are impossible by design,
flutter-tonguing is possible but can be dangerous
if the repetition rate is higher than the mechanics
allow.
Harmo, an Automated Harmonium
Harmo is a computer-controlled, six-octave reed
organ with touch control, swells, and nine registers
(见图 3). Harmo’s point of departure
was an old Emile Kerkhoff (1887–1956) suc-
tion reed organ. 这 305 reeds and the key
springs were kept from the original instru-
蒙特. The bellows was replaced by an elec-
tric compressor. The organ was also equipped
with two swells and a reflective tremulant
机制.
36
电脑音乐杂志
数字 2. Piston with Pyrex
glass housing, detail of
Puff.
数字 3. The registers and
the reflective tremulant
mechanism of Harmo.
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
数字 2.
数字 3.
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
Maes, Raes, and Rogers
37
数字 4. Ob.
As this robot is tuned to 440 赫兹, 而不是
435 Hz as in Harma, it is more suitable for integra-
tion into the robot orchestra. Tubular solenoids with
a diameter of 20 mm were used to activate the keys.
They serve as levers to reduce the required force
to push the pallets down. Because the magnets are
wider than the distance between the keys (13.5 毫米),
they were mounted in alternating rows.
Experiments showed that the gradual opening
of the dynamic shutters led to interesting sonic
结果. To achieve this, linear stepper motors with
a threaded shaft were used. Although this approach
makes a smooth movement possible, some extra
noise is caused by the audible stepping frequency.
The main advantage of this mechanism is that it
draws no current to hold its position. The whole
弹道, from closed to fully open, takes about 500
毫秒, a sufficient rate for swell effects. For faster
wind pressure changes, a stepper motor-driven wind
valve is used.
Various possibilities were explored for the design
of the tremulant. The operation of the original
tremulant is based on the acoustic reflection of
sound on the large cardboard blades of a rotator. 这
approach makes use of the Doppler effect to create
a subtle, but real, 颤音. Because autonomous
control over the modulation frequency was desired,
the original mechanism had to be redesigned and
a reflector mechanism, driven by a variable-speed
motor, was built. A low-power, low-noise DC motor
from an old cassette recorder is used to drive the
reflector.
Because full 73-note polyphony would have
required the use of a 45-amp, 12-V DC power supply,
and because the compressor would never supply
enough wind to make all the reeds sound, 这
polyphony of Harmo is limited to 32 笔记.
In contrast to Harma (the first automated reed
器官), Harmo retains its original keyboard. 作为
a consequence, it became possible to play the
organ in the traditional way, either combined with
automated playing or without. 然而, no manual
alternatives for registration and expression control
已计划.
The velocity control is less effective than, 为了
例子, on Bomi, as the speed by which the valves
open in a reed organ is generally much faster than
the rather slow build-up of a sound from the reeds.
Monophonic Wind Instruments
Autosax, an automated saxophone developed in
1989, was the first member of the robot orches-
tra. Various other monophonic wind instruments
followed: 所以, an automated sousaphone; Bono, 一个
automated valve trombone; Heli, an automated
Helicon; Korn, an automated cornet, Ob, an auto-
mated oboe, and Fa, an automated bassoon.
Previous attempts at Logos and elsewhere have,
with varying levels of success, created artificial reeds
and lips to act as computer-controlled pressure-
regulated valves driving air column resonance
(Toyota Motor Corporation 2003; Solis et al. 2006;
Petersen et al. 2009; 沃尔夫 2011). After many exper-
瞬间, all of Logos’s monophonic winds except the
Sousaphone (所以) were outfitted with compression
drivers and acoustic impedance converters that feed
the drive signal to the instrument via a capillary, 作为
suggested by Benade (1990) 和别的.
Ob, an Automated Oboe
A concert instrument made by the Belgian instru-
ment builder F. Debert, probably dating from the
first half of the 20th century, is the basis for Ob
(见图 4). The general concept is to realistically
automate an existing, unmodified instrument.
During the automation of Ob, the main concern
was the silent operation of the electromechanical
38
电脑音乐杂志
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
control of the levers. The fingerings were simplified
in order to use as few solenoids as possible: six
were used to close the open holes and seven were
used for the essential levers. This simplification
was possible because, although some levers are
essential for performers, they are far less important
in an automated version, as the attack of the tone is
guaranteed by the nature of the sound mechanism.
In the case of some levers, it was decided to automate
the closing pad directly, instead of implementing a
solenoid to activate them in the same manner as
human fingers would. Special fingering tables for
quarter-tone and other microtonal applications were
发达, as were alternative fingerings to achieve
different sound colors.
Several experiments were conducted to activate
the double reed. Double reeds made of piezoelectric
material glued to brass plates did not live up to
expectations, as the sound pressure obtained was
very low, even when driving the piezo-material
well above its rated maximum voltage (35 V).
For a second experiment, a double-faced piece of
piezoceramic was bonded to a central brass plate
and placed just touching an absolutely flat, thick
brass plate with a 4.2-mm diameter orifice. 这
approach delivered a strong buzz, but with the sound
quality dependent on the frequency as well as on
the applied air pressure. A small, DC motor–driven
vacuum-cleaner type of compressor produced the
required pressure of about 15 到 30 mBar, 但它是
very noisy. Because this did not provide the desired
结果, a third experiment was conducted. A tweeter
motor driver, made for driving an exponential horn,
was coupled to an acoustic impedance converter
modeled after a real reed in a human mouth cavity.
The 12-mm-long cylindrical part fits inside the
outlet of the RCA pressure driver, without touching
the titanium dome inside. The other side fits nicely
into the oboe, replacing the reed. The realism of the
produced sound becomes highly dependent on the
waveform applied to the driver. A trapezoidal wave
shape, in combination with the proper articulation
(frequency modulation of at least the first two
partials above the fundamental as well as some
调幅), delivers the most realistic
结果.
The entire automated oboe construction was
suspended in a cradle so that the instrument is
free to move in different inclinations and, 在这个
方式, mimic the behavior of a human oboist. 成为
able to control and, if desired, to hold a specific
inclination, the axis of suspension is provided with
a dented wheel driven by a chain and a DC motor
with reduction gears. Movement is limited to an
angle of about 90˚. Multiphonics are not currently
implemented in the firmware, although experiments
have proven that they can be created via amplitude
modulation of the driver signal.
String Instruments
At present only two string instruments have been
发达: Hurdy, a two stringed automated bass
hurdy gurdy and Aeio, an Aeolian cello.
Aeio, an Automated Aeolian Cello
The problems encountered during the construction
of Hurdy led to many new ideas and experiments
regarding acoustic sound production from bowed
strings. In contrast to Hurdy, where the string is
bowed, the strings on Aeio are activated through a
magnetic drive (见图 5). 所以, 它不是
necessary to send complex commands to specify
envelopes for bow pressure, bowing speed, finger
pressure, and bowing angle to determine the pitch,
dynamics, and timbre of the notes.
Aeio has twelve hardened spring steel strings
with a diameter of 1.5 毫米. The strings are arranged
chromatically and each can be individually “bowed”
via the electromagnetic system. The soundboard
was made from hardened brass mounted in a steel
frame.
The strings are tuned from MIDI note 36 到 47,
and each string is equipped with a felt-covered,
solenoid-driven damper to enhance the expression
可能性. Each string can sound the fundamental,
as well as the entire series of slightly inharmonic
部分. 所以, the range covers at least the
ambitus of a classical cello, from MIDI notes 36
到 127. Aeio utilizes the same principle as an
Ebow, but here the strings are brought to vibrate by
Maes, Raes, and Rogers
39
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
数字 5. Aeio.
Percussion Instruments
The orchestra holds a wide range of non-pitched
percussion instruments. The Rotomoton consists of
five automatically tunable and playable rototoms
of various sizes. Troms has a collection of seven
single-skin drums from 7 到 70 cm in diameter.
Each drum has different beaters. Hat is the most
recent percussion instrument, and also the only
robot that was commissioned for another artist,
Aphex Twin. Various objects can be clamped onto
this “hit-anything” robot, which will hit whatever
is placed on it. Simba consists of a bronze bell
cymbal, a couple of bass castanets, and a bell-rim
tambourine without drum skin. One of the smallest
automata, Snar, has a snare drum automated with
13 beaters from the inside and two drum sticks
from the outside. One of the percussion instruments
is integrated in another automaton: Casta Uno,
consisting of 15 automated castanets, can be found
on top of Vox Humanola. A separate automated
castanet was built a few years later, Casta Due, as it
was impractical to take Casta Uno in and out of Vox
Humanola for specific setups.
Automated bells form the largest chunk of the
pitched percussion family. 例如: Belly,
consisting of 34 automated brass bells; Vacca,
consisting of 48 automated cow bells and its smaller
brother Vitello, consisting of 36 automated cow
bells; and Llor, the automatization of 11 stainless
steel shells of various diameters and a single
antique bronze bell of similar shape. This family
also houses two quarter-tone instruments, Tubi,
an automated quarter-tone tubophone, and Xy,
an automated quarter-tone xylophone, 也
Klung, an automated brass angklung, and Vibi, 一个
automated vibraphone.
Two player pianos, as well as a player toy piano,
complete the pitched percussion section of the
orchestra. The first player piano, Player Piano I, 曾是
发展于 1994. It is one of the oldest musical
robots of the orchestra. As described previously, 它是
design was based on the player piano of Trimpin
(Perkis 1999) but whose the sturdiness and reliability
were improved. 在 2004 a new type of player piano,
PP2, was designed. Like its predecessor, the PP2 is
a mechanism that is placed on top of the keyboard
two electromagnets, driven by a two-phase signal
on opposite sides of the string. The Ebow is an
electronic device that generates an electromagnetic
场地, commonly used to move a string, such as on
an electric guitar (Raes 2010d).
All the strings, or any combination of them, 能
play simultaneously. Vibrato and glissandi, 虽然
common on bowed instruments, are impossible on
Aeio. It is also impossible to play fast staccatos
or pizzicatos, as stronger electromagnets would
be necessary and the operation depends on the
excitation speed of the string, which always takes a
certain amount of time.
40
电脑音乐杂志
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
数字 6. Toypi.
of a regular piano. It uses look-up tables to access a
variety of velocity scales found in different brands
of grand pianos. Different tables can be uploaded
to the instrument. As the velocity sensitivity of a
piano depends on its brand and condition, variable
look-up tables allow PP2 to adapt to a specific brand
of piano. With this instrument, the repetition rate,
and the continuous control of the sustain pedal,
exceed the capabilities of a conventional piano. 这
满的 88 polyphony surpasses other player pianos such
as Yamaha’s Disklavier, whose polyphony is limited
到 32 笔记 (Yamaha Corporation 2011).
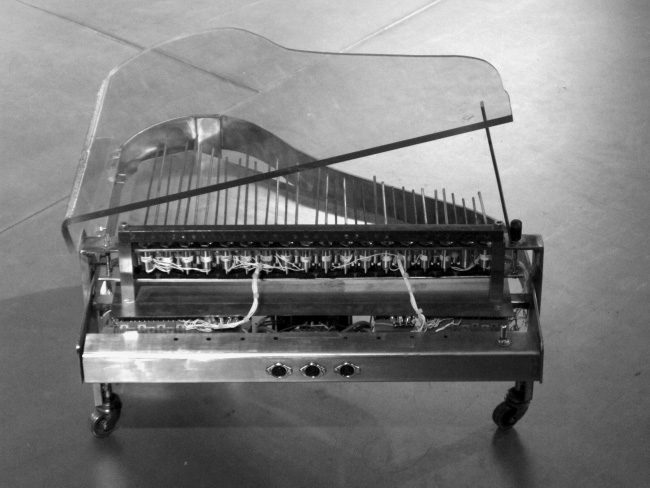
设计. The keyboard and action were replaced by a
tubular solenoid assembly. The general shape of the
instrument’s stainless steel chassis closely follows
the typical shape of a normal grand piano. 这
automaton enables very precise velocity control
and extremely fast repetition speeds, opening up
new sonic worlds. The maximum sound volume
is limited due to the nature of the instrument. 作为
sound volume is inherently connected to the size
of the rod assembly, louder sound would dictate
thicker as well as longer rods.
Toypi, an Automated Chromatic Toy Piano
Vibi, an Automated Vibraphone
Toypi, an automated chromatic toy piano, keeps the
idea of the original instrument while doing away
with the mechanics (见图 6). Toypi was created
from a 35-note chromatic toy piano produced by
Antonelli in Italy. Once the cover had been lifted,
the clamped rods that were mounted on a cast iron
bar were carefully removed. A new brass soundboard
was created to replace the original plastic one.
To preserve the typical sound, the original small
wooden hammers were integrated into the new
Much similar work of instrument builders preceded
Logos’s Vibi (Darge and Soetaert 1994), and automa-
tions of vibraphones, xylophones, or glockenspiel
can even be found in the large dance organs (或者-
chestrions) from the interbellum. Vibi makes an
appeal to these prior experiments and improves
them by adding computer control, touch control,
and individual dampers for each bar. At least one
builder, Tim O’Keefe, has based his automatization
of the vibraphone on Logos’s Vibi (奥基夫 2009).
Maes, Raes, and Rogers
41
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
数字 7. Several Lukas
Ledex solenoids that drive
the beaters of Vibi.
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
The construction of Vibi departed from a small-
model Yamaha vibraphone (type YV-600B, serial
数字 1977) of which only the tuned aluminum
bars and resonators were kept (37 笔记, from C4
to C7). A new electric circuit was designed for
the vibrato mechanism, as the original was too
noisy and could not easily be computer controlled.
The beaters are driven by Lukas Ledex solenoids
mounted under the extremities of the sound bars
(见图 7). The dampers were made with the
same type of solenoids, but rubber and felt pads
were mounted on the anchors as dampers. 因为
the anchors fall back on the felt-covered steel bars
by gravity, there is no need to use springs.
Vibi enhances the musical possibilities of a
vibraphone. As each individual beater has complete
autonomy, the polyphony far exceeds that of a
human performer, in which the number of notes
that can be played equals the number of sticks. 每个
bar features individual velocity control and dampers.
A new element, damper-hold mode, whereby the felt
covered dampers can be pushed against the bars with
a continuously variable force, was implemented for
the first time in Vibi. This mode allows the bars to
be struck while being damped to varying degrees.
Each row of resonators has its own rotating
shaft. Two stepping motors were provided in order
to control the rotational speed of the upper row
(corresponding to the black keys of a piano) 和
lower row (the white keys of a piano) independently
over a wide range.
The ability to change sticks, as musicians are
often required to do in contemporary music, 曾是
not implemented. This would have required at least
another row of solenoids with softer beaters, 和
there was not enough space under the bars to allow
for such an undertaking. Placing the solenoids above
the bars would eliminate the possibility of manually
playing the instrument in conjunction with the
automated player.
42
电脑音乐杂志
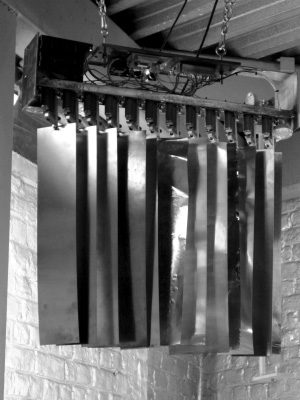
数字 8. Psch suspended
from the ceiling of the
Logos Tetrahedron.
The design consists of twelve driving solenoids
with individual metal sheets of various thicknesses
and sizes. Experiments showed that Martensitic
stainless steel produced the most desirable sound.
Hasberg and Lamifold stainless steel sheets were
used in the final construction of the automaton.
The maximum sound level is a function of the size
of the sheets or foils used. The noise characteristics
are merely a function of the material’s thickness and
stiffness, and the shaking speed is limited by the
mechanical properties of the solenoids.
Psch can produce a steady noise by shaking the
sheets at speeds exceeding the mechanical and very
low resonant frequency of the pendulum system
formed by the combination of sheet and solenoid
anchor. Single strokes at high activation forces
produce noise shots. 然而, when one strokes
a thicker sheet, flexatone-like sounds with clear,
sliding pitch content can occur.
Compositions
In addition to performances at external venues, 这
Man and Machine robot orchestra puts on a new
thematic program at the Logos Tetrahedron every
月. These concerts contain orchestrations of
existing compositions and new pieces from Logos
members or composers worldwide. A mix of se-
quenced, algorithmic, and interactive compositions
is featured. Nearly all algorithmic pieces written for
the orchestra are conceived for live performance,
where the course of the piece can be adjusted in
real time. Experimental dance is almost always an
integral part of the performance.
The Man and Machine robot orchestra is designed
with the idea of motivating other composers to write
for the orchestra. MIDI templates are available to
make composing for the orchestra more accessible.
Logos has premiered interactive, algorithmic, 和
MIDI-file-based pieces from national and interna-
tional composers (见表 2).
User Feedback
What makes the Logos orchestra unique is that
a group of composers intensively and regularly
Maes, Raes, and Rogers
43
Noise Generators
The orchestra has a large section of noise generators,
many of which are newly designed instruments.
The automaton Springers has a selection of shakers,
springs, and one siren. Thunderwood automates,
除其他事项外, various nature sounds such
as rain thunder, 风, and woodpeckers. Twelve
small automated thunder sheets form Psch. 各种各样的
singing saw or flexatone-like sounds can be produced
by Flex, which can be considered a realization of
Luigi Russolo’s fifth category of ”intonarumori”:
sounds obtained by percussion on materials such
as metal, 木头, skin, and stone. Another noise
机器, described earlier, is Dripper, a MIDI-
controlled rain machine that can precisely control
the size and frequency of each drip. Sire is composed
的 24 motor-driven sirens. The three-octave range of
each siren is controllable with a resolution of 14 bits,
which provides many possibilities for microtonal
音乐.
Psch, an Electromechanical Noise Generator
Psch has a variety of small thunder sheets of
graduated thicknesses that can be precisely shaken
and can create a ”reversed cymbal” sound and
similar explosive noises, as are typically found in
various types of contemporary music (见图 8).
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
桌子 2. Compositions Written for the Man and Machine Orchestra
Composer
Mark Applebaum
Clarence Barlow
Scott Barton
Rainer Boesch
Joachim Brackx
Sebastian Bradt
Barbara Buchowiec
Warren Burt
Peter Castine
Claude Coppens
Moniek Darge
Kris De Baerdemacker
Joris De Laet
Hanne Deneire
Ellen Denolf
Giacomo Di Tollo
Moritz Eggert
Hiroshi Fukumara
Joe Futrelle
Frans Geysen
Piotr Groen-Korab
Carlos Guedes
Bernd Haerpfer
Martin Herraiz
Dick Higgins
Aurie Hsu
Lukas Huisman
Jonas Jurkunas
Steven Kemper
Jonathon Kirk
Siegfried Koepf
Juan Sebasti ´an Lach Lau
Kristof Lauwers
Roeland Luyten
Michael Manion
David Maranha
Rytis Mazulis
Jelle Meander
Rene Mogensen
Fred Momotenko
Kostas Moschos
Knut M ¨uller
Phill Niblock
Frank Nuyts
Abraham Ortiz
Number of
Pieces
Interactive and/or Algorithmic
(IA) or MIDI file (中号)
1
3
2
1
1
53
31
4
1
1
3
24
2
1
1
2
4
10
1
1
1
1
1
1
1
1
6
2
1
1
1
1
52
2
2
3
1
4
1
5
1
1
1
1
1
中号
IA
中号
中号
中号
中号
中号
IA
中号
中号
中号
中号
IA
中号
IA
中号
中号
中号
中号
中号
中号
IA
中号
中号
中号
中号
中号
中号
中号
中号
中号
中号
IA
中号
中号
中号
中号
中号
中号
中号
IA
中号
中号
中号
中号
44
电脑音乐杂志
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
桌子 2. Continued.
Composer
Daniel Pastene
Adrian Pertout
Godfried-Willem Raes
Jaime Reis
Jacques R ´emus
Hans Roels
Troy Rogers
Jeremiah Runnels
Stephan Schleiermacher
Stefaan Smagghe
Thomas Smetryns
Ricardo Spiritini
Bruno Spoerri
Yvan Vander Sanden
Celio Vasconcellos
Jasna Velickovic
Francesca Verbauwhede
Xavier Verhelst
Maya Verlaak
Dirk Veulemans
Brent Wetters
Caroline Wilkins
Number of
Pieces
Interactive and/or Algorithmic
(IA) or MIDI file (中号)
2
1
61
3
3
7
1
1
9
1
3
1
1
11
2
1
1
1
1
3
2
1
中号
中号
IA
IA
中号
中号
IA
IA
中号
中号
中号
中号
IA
IA
中号
中号
中号
中号
IA
中号
中号
中号
works with the orchestra, providing the builder
with immediate feedback on how to improve the
automata.
Sometimes adaptations of the hardware are
necessary to fulfill the composers’ requests. 为了
例子, the motor of Vibi, in its original design,
stopped in an arbitrary position, but the final
placement of the valves had an influence on the
volume of the sounds produced. Position sensors
were added to the rotating vibrato mechanism in
order to always stop the motor in a position where
the resonators are fully opened.
At other times, extra hardware is added. On a
composers’ request, squeakers were mounted on
Thunderwood to create a larger variety of non-
musical sounds, and audio inputs were added to
the brass instruments in order to generate vocal
instrumental sounds and multiphonics.
在某些情况下, adaptations of the software are
sufficient. 最初, the woodwind instruments
had a new fingering for each note. In the case of
repeated notes, the fingering was released after each
note and replaced for the following note. 这些
unnecessary movements caused unwanted noises
that could easily be avoided. Composer feedback
led to an adaptation of the fingering, which is now
maintained after each note until a new pitch is
played. Not only did this adaptation remove the
unwanted noises, but it also greatly improved the
resonance.
Sometimes the adaptations increase user-
friendliness. Instead of requiring the user to in-
put the wind modulation separately for each note,
Bomi’s tremulant speed is now automatically re-
peated across notes, and the user only has to
determine the modulation frequency as well as
the range of pitches to which it applies. A sim-
ilar adaptation is currently being implemented
in the percussion instruments to facilitate drum
rolls.
Maes, Raes, and Rogers
45
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
In the following paragraphs we will discuss six
compositions demonstrating various ways that the
automata can be controlled.
Kristof Lauwers’s Burden Birds was composed as
a soundtrack to a film by Lieve Vanderschaeve in
which two birds fly through a mountain landscape,
with light and weather conditions in constant flux.
The light changes are musically reflected in the
shifting overtone structure of the organs Piperola
and Bourdonola, obtained by varying the wind
pressure of each. The flapping of the birds’ wings
is translated into arpeggiated patterns with varying
dynamics on Vibi, Puff, and Psch in a manner that
emphasizes the essence of each instrument.
Like Burden Birds, Sebastian Bradt’s Intron
Wenn explores the novel capabilities of the instru-
评论. At times, Bradt uses extended techniques
to produce timbres uncharacteristic of individual
仪器. At other moments, Bradt combines
these uncommon timbres to create otherworldly
composite textures. Intron Wenn takes advantage of
the instruments’ fixed positions to construct spatial
gestures.
Xavier Verhelst has created many inventive or-
chestrations that highlight the unique sound colors
of the robot orchestra. La Romanesca (从 1575
Dublin Virginal Book) was a very popular song in the
late Renaissance. Verhelst illuminates the different
melodic or rhythmic ideas of each section of La
Romanesca by using different groups of automata.
In Yvan Vander Sandens’s Hyperfolly, an AKAI
Ableton Performance Controller (APC-40), com-
bined with his custom written software PIMP
(Pike’s Interactive Music Programme), is used to
steer the automata. His aim was to use the APC as
an integral part of the performance. Each button of
the APC is mapped to a specific automaton. The per-
former’s actions resemble those of an action-gamer,
leading to a ritualistic performance wherein the
audience tries to grasp the meaning of the performed
gestures and their relation to the audible result.
Kristof Lauwers has worked together with Moniek
Darge on a series of pieces in which audio signals
and gesture data determine the resulting sound.
As the title suggests, Horizon for Three features
three performers on stage: Moniek Darge, Marian
De Schryver, and Zam Ebele. Audio signals from
Darge’s electric violin and gestures of all three
performers were mapped in the software program
Pure Data to control the automata in various
方法. The pitches played on the violin are mapped
to pitches on the organ, piano, and vibraphone.
Movements by the performers determine the wind
pressure in the organs and the rhythms of the
percussive instruments.
Raes’s Schroeder’s Second Dream highlights the
advanced capabilities of Toypi in an interactive
语境. The extremely high repetition speeds of
Toypi are thoroughly explored. The viola mimics the
perceived pitches, which are not always equivalent
to the scored notes owing to the high inharmonic-
ity typical of toy pianos. The performers’ gestures
are captured by the Invisible Instrument, an array
of radar/sonar sensing devices developed at Logos
(Raes 1993, 2010乙, 2010C). The captured gestures
are mapped to various wind sounds produced by
Thunderwood. As with all of Raes’s compositions,
Schroeder’s Second Dream was realized with the
real-time composition programming language Gen-
eral MultiTasker, which was developed at Logos.
结论
Because of its reliability, its usability, 和它的
“readability,” we feel that the Man and Machine
robot orchestra lies at the forefront of the devel-
opment of musical robotics. The orchestra will
further expand through the development of more
monophonic wind and string instruments, 也
the development of instruments that use ribbons to
replace strings, making acoustic, string-like instru-
ments possible without an amplifying soundboard.
Along with the addition of new automata, new de-
vices in the field of gesture sensing and recognition
will be developed. In this way the orchestra’s tone
color will be extended and the control possibilities
will reach even further.
致谢
The Logos foundation is funded by the Flem-
ish government, the city of Ghent, 和
46
电脑音乐杂志
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
Province of East Flanders. The authors wish
to thank the various people working at Logos
for their input. Troy Rogers’s involvement was
made possible by a 2009–2010 Fulbright Research
授予.
design of the lip, tonguing, fingers and air pump mech-
anisms.” Proceedings of the 2009 IEEE International
Conference on Robotics and Automation, PP. 847–
852.
Raes, G.-W. 1993. Een onzichtbaar muziekinstrument.
PhD Thesis, Faculty of Arts and Philosophy, Ghent
大学.
Raes, G.-W. 1994. Spoken conversation with Trimpin. 24
参考
十月.
Benade, A. H. 1990. Fundamentals of Musical Acoustics.
Mineola, 纽约: Courier Dover.
Captured! By Robots. 2011 “Captured! By Robots.” Avail-
able on-line at www.capturedbyrobots.com/index.htm.
Accessed March 2011.
张, 是. 2003. “(Toy) Piano Man Makes a Big
Sound from Tiny Keys.” Available on-line at
community.seattletimes.nwsource.com/archive/?日期
=20030331 &slug=toypiano310. Accessed March 2011.
Chinen, 氮. 2010. “One-man band—Pat Metheny up-
grades a 19th century concept.” Available on-line at
www.nytimes.com/2010/01/31/arts/music/31metheny
.html. Accessed March 2011.
Coenen, A. 1992. “Computer-Controlled Player Pianos.”
电脑音乐杂志 16(4):104–111.
Darge, M。, 和H. Soetaert. 1994. “Automatic Music.”
Logos-blad 16(8):5–10.
EMMI. 2011. Instruments. Available on-line at
www.expressivemachines.org. Accessed March 2011.
Kapur, A. 2005. “A History of Robotic Musical Instru-
ments.” Proceedings of the International Computer
Music Conference, PP. 21–28.
Karmetik. 2010. “Robotics.” Available on-line at
www.karmetik.com/labs/robotics. Accessed March
2011.
Louie, G. 2002. “Trimpin: Computers and Music—
Meeting Held February 12, 2002.” Available on-line at
www.aes.org/sections/pnw/pnwrecaps/2002/trimpin.
Accessed March 2011.
McNeill, 乙. 2008. “Instrument Beginning of
‘Huge Robot Orchestra’.” Available on-line
at www2.dailyprogress.com/news/cdp-news
-local/2008/jan/24/instrument beginning of huge robot
orchestra 01 2-ar-66848. Accessed March 2011.
奥基夫, 时间. 2009. “Marv Web site.” Available on-line
at www.robovibes.com/physical. Accessed March
2011.
Perkis, 时间. 1999. “Taming the Elements with MIDI.”
Electronic Musician 15(12):110–113.
彼得森, K. J。, 等人. 2009. “Development of the an-
thropomorphic saxophonist robot WAS-1: 机械的
Raes, G.-W. 2010A. “A Composers Guide to the
Logos Robot Orchestra.” Available on-line at
www.logosfoundation.org/instrum gwr/manual.html.
Accessed March 2011.
Raes, G.-W. 2010乙. “Expression Control in Automated
Musical Instruments. 调查 (1987–2010).” Available
on-line at www.logosfoundation.org/g texts/expression
-control.html. Accessed March 2011.
Raes, G.-W. 2010C. “Namuda: Gesture Recogni-
tion for Musical Practice.” Available on-line
at www.logosfoundation.org/ii/Namuda 123.pdf.
Accessed March 2011.
Raes, G.-W. 2010d. “4047 Ebow.” Available on-line at
www.logosfoundation.org/kursus/4047.html. Accessed
六月 2011.
R ´emus, J. 2006. “Non Haptic Control of Music by Video
Analysis of Hand Movements: 14 Years of Experience
with the ‘Camera Musicale’.” Proceedings of the
2006 International Conference on New Interfaces for
Musical Expression, PP. 250–253.
R ´emus, J. 2011A. “Carillon n˚3.” Available on-line at
jacques-remus.fr/carillon-3.htm. Accessed March 2011.
R ´emus, J. 2011乙. “Concertomatique n˚2.” Available
on-line at jacques-remus.fr/concertomatique-2.htm.
Accessed March 2011.
R ´emus, J. 2011C. “Les Pic Verts.” Available on-line at
jacques-remus.fr/pic-verts.htm. Accessed March 2011.
Schl ¨ager, C. 2010. “Electric Motion Orchesters.” Available
on-line at www.christofschlaeger.de/instrumente.htm.
Accessed March 2011.
歌手, E., 等人. 2004. “LEMUR’s Musical Robots.”
诉讼程序 2004 Conference on New Interfaces
for Musical Expression, PP. 181–184.
Solis, J。, 等人. 2006. “The Waseda Flutist Robot WF-4RII
in Comparison with a Professional Flutist.” Computer
音乐杂志 30(4):12–27.
Southworth, C. 2010. “Robots.” Available on-line at
www.ensemblerobot.org/robots.shtml. Accessed March
2011.
The Trons. 2011. “The Trons.” Available on-line
at www.myspace.com/thtrons. Accessed March
2011.
Maes, Raes, and Rogers
47
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
Toyota Motor Corporation. 2003. “Toyota Partner Robot.”
Available on-line at www.toyota.co.jp/en/special/robot.
Accessed March 2011.
沃尔夫, J. 2011 “NICTA-UNSW Robot Clarinet.”
Available on-line at www.phys.unsw.edu.au/jw/
clarinetrobot.html. Accessed March 2011.
Trimpin. 2011. “Liquid Percussion.” Available on-line
at www.trimpinmovie.com/#/selectedworks. Accessed
行进 2011.
Weinberg, G。, 和S. 德里斯科尔. 2006. “Toward Robotic
Musicianship.” Computer Music Journal 30(4):28–45.
Yamaha Corporation. 2011. “DC2M4 PE.”Available
on-line at usa.yamaha.com/products/musical
-instruments/keyboards/disklaviers/grand pianos/
dc2mm4 pe/?mode=model#psort=hightolow. Accessed
行进 2011.
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
e
d
你
/
C
哦
米
j
/
我
A
r
t
我
C
e
–
p
d
F
/
/
/
/
3
5
4
2
8
1
8
5
6
5
3
7
/
C
哦
米
_
A
_
0
0
0
8
9
p
d
.
j
F
乙
y
G
你
e
s
t
t
哦
n
0
7
S
e
p
e
米
乙
e
r
2
0
2
3
48
电脑音乐杂志