A Systematic Literature Review of the
Successors of “NeuroEvolution
of Augmenting Topologies”
Evgenia Papavasileiou
Department of Electronics and Informatics (ETRO), Vrije Universiteit Brussel,
布鲁塞尔, B-1050, 比利时
imec, Leuven, B-3001, 比利时
epapavas@etrovub.be
Jan Cornelis
Department of Electronics and Informatics (ETRO), Vrije Universiteit Brussel,
布鲁塞尔, B-1050, 比利时
jpcornel@etrovub.be
Bart Jansen
Department of Electronics and Informatics (ETRO), Vrije Universiteit Brussel,
布鲁塞尔, B-1050, 比利时
imec, Leuven, B-3001, 比利时
bjansen@etrovub.be
https://doi.org/10.1162/evco_a_00282
抽象的
NeuroEvolution (NE) refers to a family of methods for optimizing Artificial Neural Net-
作品 (人工神经网络) using Evolutionary Computation (EC) 算法. NeuroEvolution of
Augmenting Topologies (整洁的) is considered one of the most influential algorithms in
the field. Eighteen years after its invention, a plethora of methods have been proposed
that extend NEAT in different aspects. 在本文中, we present a systematic literature
review (SLR) to list and categorize the methods succeeding NEAT. Our review protocol
identified 232 papers by merging the findings of two major electronic databases. 应用程序-
plying criteria that determine the paper’s relevance and assess its quality, 导致
61 methods that are presented in this article. Our review article proposes a new cate-
gorization scheme of NEAT’s successors into three clusters. NEAT-based methods are
categorized based on 1) whether they consider issues specific to the search space or the
fitness landscape, 2) whether they combine principles from NE and another domain, 或者
3) the particular properties of the evolved ANNs. The clustering supports researchers
1) understanding the current state of the art that will enable them, 2) exploring new
research directions or 3) benchmarking their proposed method to the state of the art,
if they are interested in comparing, 和 4) positioning themselves in the domain or
5) selecting a method that is most appropriate for their problem.
关键词
NeuroEvolution, genetic algorithms, artificial neural networks, topology evolution, 在-
编码, systematic literature review.
1
介绍
NeuroEvolution (NE) is a learning method that uses Evolutionary Algorithms (EA) 到
optimize the parameters of Artificial Neural Networks (人工神经网络) (Stanley et al., 2019).
In early neuroevolutionary methods, evolutionary optimization methods (例如, Genetic
稿件收到: 25 行进 2020; 修改: 5 八月 2020 和 23 十月 2020; accepted: 27 十月 2020.
进化计算 29(1): 1–73
© 2020 麻省理工学院
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
Algorithms (GAs)) were used for learning the connection weights of fixed topology
人工神经网络 (Whitley et al., 1990; Montana and Davis, 1989; Gomez and Miikkulainen, 1997;
Moriarty and Miikkulainen, 1996; Gomez and Miikkulainen, 1998). 然而, 自从
definition of a network’s topology has a major effect on its performance, new methods
appeared that optimize both the weights and the topology (Maniezzo, 1994; Liu and
Yao, 1996; Yao and Liu, 1998; Moriarty and Miikkulainen, 1995; Stanley and Miikku-
lainen, 2002乙). These methods are known as Topological and Weight Evolving Artificial
Neural Networks (TWEANNs).
TWEANNs offer significant advantages over fixed topology ANNs, as finding the
optimal topology of an ANN requires time-consuming evaluations of potential archi-
tectures. Especially, in complex problems, the number of neurons and connections that
are required scales with the complexity of the problem (Manning and Walsh, 2012) 和
thus the manual definition of the optimal topology is even more difficult. 而且, 这
topology defines the size of the search space: selecting a fixed topology smaller than
the optimal means that the search is performed in a lower dimensional space and thus
the optimal solution will not be found. 另一方面, selecting a bigger topology
than the optimal one implies that the search is performed in an unnecessarily high di-
mensional space. In TWEANNs the problem of identifying the right ANN topology is
tackled by their ability to automatically discover the optimal architecture.
在 2002, a revolutionary TWEANN method called NeuroEvolution of Augmenting
拓扑结构 (整洁的) was invented by Kenneth Stanley and Risto Miikulainen (斯坦利
and Miikkulainen, 2002乙). The method provides solutions to problems encountered in
NE by facilitating the crossover between individuals of different length, evolving net-
works by adding new structure when necessary, and protecting structural innovations
by organizing them in species.
今天, 18 多年后, the NEAT algorithm is still relevant as the large number of
published papers extending NEAT or applying NEAT-based methods on challenging
problems shows. To our knowledge, no systematic literature review (SLR) of NEAT-
based successors exists. Literature review papers that present an overview of NE meth-
ods in general can be found (Yao, 1993, 1999; Floreano et al., 2008; Ding et al., 2013;
Risi and Togelius, 2015; D’Ambrosio et al., 2014; Stanley et al., 2019). 然而, none
of them uses a systematic review protocol. 反而, they report on the most prominent
and important papers in the field. The reviews (Yao, 1993, 1999; Floreano et al., 2008) 是
very detailed papers that cover the field of NE until 2008. More recent review papers
(例如, Ding et al., 2013; Risi and Togelius, 2015) 存在, but their scope is different than the
current article, as Ding et al. (2013) describe basic theories and methods in NE and Risi
and Togelius (2015) discuss NE’s applications in games. A chapter in Growing Adaptive
Machines by D’Ambrosio et al. (2014) gives an overview of the methods that followed
HyperNEAT within five years. 最后, the most recent paper (Stanley et al., 2019) gives
an overview of different aspects of recent NE techniques and discusses their potential
for application in the field of deep learning.
In the current article, we present a new categorization of the NEAT successors based
on criteria defined in this article. This article can serve as a guidance manual that allows
researchers to propose a new NEAT-based method by starting from the most appropriate
baseline method or the most recent method or to select the method that is more appro-
priate to solve their problem.
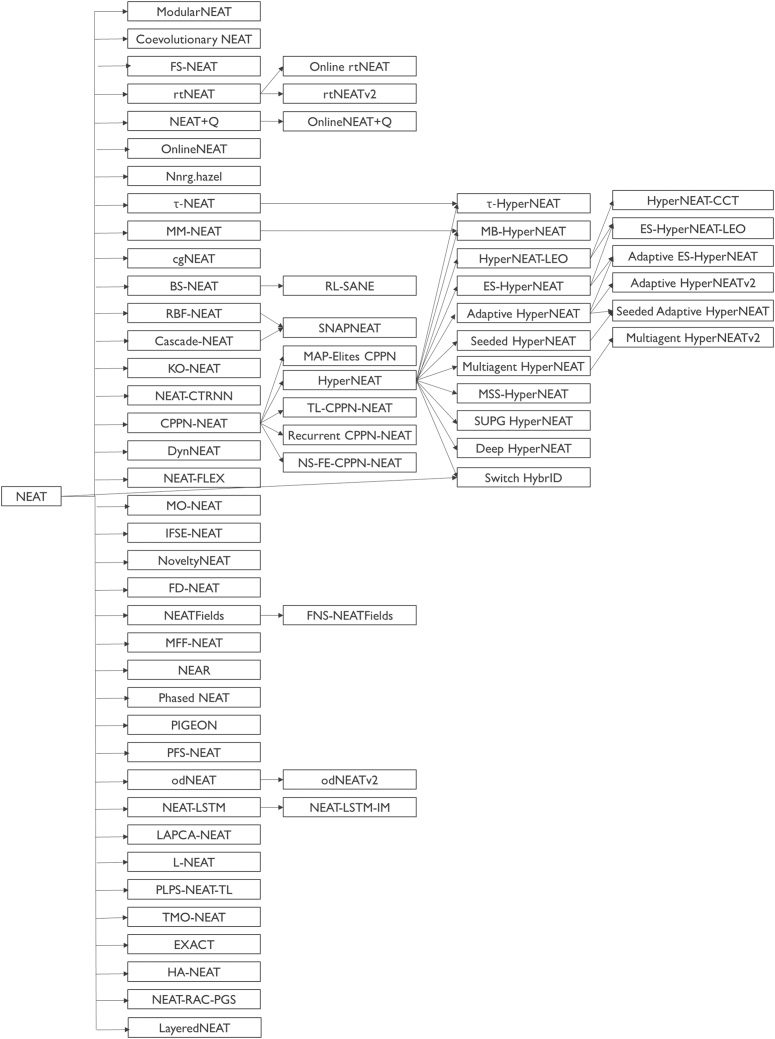
Toward this purpose, detailed tables presenting a fine-grained categorization of the
methods according to three main criteria, as well as an illustration (见图 1 在
p. 13) of the trajectory of the advances in NEAT-based methods are provided. With this
2
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
new categorization scheme researchers can better position their work in the landscape
of existing methods, or select an existing method that fits best the properties of their
problem’s landscape/search space, or that evolves ANNs with particular properties or
that combines principles from different research fields. 而且, researchers who are
interested in benchmarking their method to the state of the art can consult the detailed
tables in the Appendix regarding the employed datasets and performance metrics. 全部
the NEAT successors identified by the review protocol are described in detail in the
Appendix of this article. 最后, we discuss the findings and the shortcomings of exist-
ing approaches, the popularity of NEAT-based algorithms nowadays, and their future
relevance in the era of deep learning.
The remainder of this article is organized as follows. 部分 2 describes the method-
ology engaged for conducting the SLR and Section 3 presents the answers to the main
research questions regarding the NEAT method. An extended list with detailed an-
swers to all the research questions for all the identified methods can be found in the
附录. 部分 4 presents the proposed categorization clusters and detailed tables
with the findings of the review protocol. 最后, Sections 5 和 6 contain the discussion
and conclusion parts of this article.
2 方法
With this review article we want to present an objective historical account of NEAT
successors. Toward this purpose, we raise the following question: “which methods are
based on and succeeded NEAT within a period of 15 年?” A systematic literature re-
view is a type of review that satisfies this objective (Bettany-Saltikov, 2010) as it allows
for the findings to be presented in an objective and independent summary (Hemming-
way and Brereton, 2009). Since a systematic review article is characterized by the devel-
opment and use of a review protocol, we followed published guidelines (Keele, 2007;
Kofod-Petersen, 2012) on “how to conduct a systematic literature review paper.” For
a comprehensive review on modern neuroevolution, not necessarily based on NEAT
方法, but focusing on current trends, readers are advised to read a paper by Stanley
等人. (2019).
Conducting a rigorous and repeatable SLR requires a review protocol (Bettany-
Saltikov, 2010). We followed the guidelines according to Keele (2007) and Kofod-
彼得森 (2012). 第一的, we defined the objective and the research questions that this review
was going to address. 第二, we designed the search strategy toward answering the
research questions by defining the search terms and the inclusion and exclusion criteria for
selecting the relevant literature. After a pilot study we refined both the search terms and
the selection criteria. In the following phase, we created a Quality Assessment check-list
to evaluate the selected literature. 最后, we determined a data extraction form inspired
by the one in Wen et al. (2012) for documenting the main features of each method.
2.1 Research Questions
The objective of this SLR is to summarize, categorize, and clarify NEAT-based NE meth-
消耗臭氧层物质. These methods will be referred to as x-NEAT.1 Toward this objective, we raised the
following Research Questions (RQ):
1. RQ1: What are the main principles and features of each method? (Principles)
1The letter “x” is used to represent the various acronyms used in the names of NEAT’s successors.
Evolutionary Computation Volume 29, 数字 1
3
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
不.
IC1
IC2
桌子 1: Inclusion and exclusion criteria.
Criterion
The study describes an extension of NEAT, (x-NEAT)
The study describes a hybrid model, 例如, based on NEAT and another
evolutionary or machine learning algorithm
EC1
EC2
The study is only an application of an x-NEAT method to a dataset or a new domain
The study describes an EA that is not a successor of NEAT but inspired by the NEAT
原则 (部分 3.1)
EC3
The study compares a not-NEAT-based NE method with NEAT, or existing x-NEAT
methods among each other
EC4
The study is an older/conference version of a relevant journal paper
IC: Inclusion Criterion, EC: Exclusion Criterion.
2. RQ2: How are the ANNs encoded into the genome? (Encoding) The purpose
is to identify the different encoding schemes that are used for representing the
ANNs phenotypes in the GAs’ genome.
3. RQ3: How does the x-NEAT method perform compared to others? Which per-
formance metrics are used to make this comparison? (Performance)
2.2
Search Strategy
Search Terms
2.2.1
In order to identify the relevant papers succeeding NEAT (Stanley and Miikkulainen,
2002乙), we had to define the search terms by identifying the major terms and alternative
spellings and synonyms. We used the Boolean OR to combine synonyms and alternative
spellings and the Boolean AND to link the major terms. The search was performed on
这 18 四月 2018 and we chose to include all the papers published until the end of
2017. After refinement, the resulting search term is the following ((神经的?evolution OR
neuroevolution* OR evolv* neural networks) AND (*neat OR augment* topologies))
AND (EXCLUDE (PUBYEAR, 2018)).
Literature Resources
2.2.2
With the search term, we searched for published journal and conference papers in the
electronic databases of Web of Science (WoS) (all databases) and Scopus. The search
导致 225 publications from all the databases of WoS and 121 publications from
Scopus. We searched each database separately and gathered the papers together. Ex-
cluding the common papers between the two databases resulted in 232 出版物
which had to be evaluated on their relevance and quality.
Study Selection
2.2.3
To select the relevant papers we read all the abstracts and we applied the inclusion (IC)
和排除 (EC) criteria defined in Table 1. Forty papers were selected based on IC1,
25 based on IC2, 和 5 based on both IC1 and IC2. Sixty-two papers were excluded
because of EC1, 7 because of EC2, 42 based on EC3, 39 based on EC4, 1 based on EC1
and EC3, 和 1 based on EC2 and EC3.
Study Quality Assessment
2.2.4
The quality of each relevant paper was evaluated according to the Quality Assessment
Criteria (QAC) defined in the format of questions and presented in Table 2. If a question
4
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
桌子 2: Quality assessment questions with possible answers: “是的,” “Partly,” or “No.”
QA1
QA2
QA3
QA4
QA5
QA6
QA7
QA8
QA9
QA questions concerning the x-NEAT’s principles
Are the aims of the research clearly defined?
Are the main aspects of the proposed method explained in detail?
If the method introduces a new encoding scheme, is it described clearly? If the same
encoding as in previous methods is used, is it understandable from the paper?
QA questions regarding the experimental procedure
Is the experimental procedure clearly described?
Is the method evaluated on sufficient number of datasets? (number of datasets ≥3: 是的,
2: partly, 1: 不)
If the study involves a custom artificial dataset, is its construction method adequately
描述的? If it cannot be described for example, in case of a video game, is the task
clearly explained?
Are the parameters of the NE algorithm clearly described?
Are the metrics used for measuring the algorithm’s performance clearly defined?
Is each experiment run for an adequate number of repetitions? (是的: ≥20, Partly:
[10,20), 不: [0,10))
QA10
Is there a statistical test to test if a statistical difference in the compared performances
存在?
QA11
QA12
Is the proposed method compared to the state of the art of NE methods?
Is the proposed method compared to other machine learning/EC algorithms?
QA questions regarding the reception of the paper from the community
QA13 Does the study have an adequate number of citations per year?2 (是的: ≥1, Partly:
[0.5,1), 不: [0,0.5))
was addressed by the paper, it could take one of the answers: “yes,” “partly,” and “no,”
which received one, one-half, and zero points, 分别. If the question was not ad-
dressed at all by the paper, then it received the answer “non-applicable” excluding it
from the calculation of the final result. 这样, a paper’s final score was calculated
by averaging the score of each question. Nine papers had a score ∈ [0, 0.5] 和他们
were excluded from the study.
2.2.5 Data Extraction
Application of the IC, EC, and the QAC resulted in 61 papers whose acronyms and
obtained scores are presented in Table 4. 从这些, we collected the necessary data to
answer the RQs. To keep the most important information from each paper, we created
cards as shown in Table 3 similar to Wen et al. (2012).
3 NEAT—Answers to the Research Questions
NeuroEvolution of Augmenting Topologies (整洁的) (Stanley and Miikkulainen, 2002乙)
is a TWEANN method that enables the learning of the structure of ANNs at the same
time it optimizes their connectivity weights. When NEAT was proposed in 2002, it pro-
vided solutions to important research questions of that time. The proficiency of the
method is attributed to the three main innovations for which ablation studies showed
2The number of citations per year (the last quality assessment criterion (QA13)) is calculated by
taking the average number of citations of the concerning paper by both the Web of Science and Scopus
and dividing by the number of years after the paper’s publication until 2017.
Evolutionary Computation Volume 29, 数字 1
5
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
桌子 3: Data extraction card.
Data Item
Value
Data extractor’s name and date
Data checker’s name and date
Study ID / Article type
Publication year
Names of the authors of the study
Article title
Name of the x-NEAT method
Characteristics of the version
Encoding scheme
Performance metrics used
that each of the introduced components is crucial to the NEAT’s performance. The three
main features of NEAT are described in Section 3.1.
3.1 Research Question 1: Principles
Historical Markings to Deal with the Competing Conventions Problem. One crucial
issue in NE is the Competing Conventions Problem, also known as the Permutation
Problem (Radcliffe, 1993) that appears when there is more than one way to represent an
ANN and because structures evolve independently in different networks. 尤其,
the problem occurs during the crossover of two genomes that are encoded differently
even though they represent the same solution. 作为结果, the resulting offspring
might suffer from loss of functionality. To overcome this problem, the system should be
able to identify identical structures. NEAT deals with this issue by means of historical
markings, 那是, by assigning an increasing innovation number when a new gene is
added to the genome. A new gene is introduced in the system by structural mutations
that add a new connection or a new node in the network. The historical markings act
as chronological indicators that facilitate crossover by identifying homologous sections
between different networks. The innovation number of each gene is inherited by the
offspring, facilitating the retaining of its historical origin throughout evolution.
Speciation to Protect Innovation. NEAT protects topological innovations through spe-
ciation in order to give time to new structures to optimize. The individuals compete
within their own niche instead of the entire population. 一般来说, when a new con-
nection is added, a random weight is assigned to it. In order to converge to its opti-
mal value, a number of generations is required. Without speciation, the new individual
would have to compete with the entire population. In that case, there is a high proba-
bility that the individual would be replaced before it gets optimized, because of its poor
performance compared with the other already more optimized networks. On the other
手, with speciation, the network competes within its own niche, so it is given time
to optimize its weights before having to compete with the entire population. The net-
works are grouped in species based on their topological similarities. This is defined by
aligning the genomes based on the historical markings and determining the matching,
disjoint and excess genes among the individuals. The nonmatching genes between the
two individuals that are located in the middle of the genomes are called disjoint genes,
while the nonmatching genes in the end of the genomes are called excess genes. 这
6
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
topological similarity is calculated through a measure called compatibility distance, 作为
δ = c1E
氮
+ c2D
氮
+ c3W ,
where E is the number of excess genes, D the number of disjoint genes, W the average
weight differences of matching genes, N the number of genes in the larger genome, 和
c1, c2, c3 the coefficients which define the importance of the three factors. In practice the
division with the number of genes N is omitted and N is set to 1.
Biasing the Search toward Smaller Structures. NEAT starts the evolution with a uni-
form population of minimal structures, 那是, fully connected networks with no hid-
den nodes and it evolves more complex networks (complexification) by introducing new
nodes and connections through structural mutations. These topological innovations are
maintained only if they are found to be useful after fitness evaluation, 那是, if they
can increase the network’s performance. 这样, NEAT tends to evolve smaller
结构.
3.2 Research Question 2: Encoding
NEAT uses direct encoding to encode the phenotypes (人工神经网络) in the genotype. In di-
rect genetic encoding, there is a one-to-one mapping between the networks’ phenotypes
and genotypes. One genome is used for encoding the nodes and a second genome for
encoding the connections. The networks’ nodes are encoded with a set of node genes
while the connections among the nodes are encoded with a set of connection genes. 这
node genes have fields that indicate the type of the node, 那是, whether the node is
an input, an output, or a hidden node, whereas the connection genes indicate the con-
nections established between the nodes in the node genome. Each connection gene con-
sists of 5 fields: the id of the node receiving the connection (in-node), the id of the node
from where the connection begins (out-node), the weight of the connection, an enabled
bit that specifies whether the connection is enabled or not, and an innovation number
which allows finding corresponding genes during mating.
3.3 Research Question 3: 评估
NEAT is tested on the XOR problem and its performance is evaluated with the average
number of generations that are required to solve it. 而且, NEAT is compared to four
other NE systems on the double pole balancing problem (a benchmark Reinforcement
学习 (RL) 任务), in terms of number of generations, their ability to generalize and
the size of the evolved networks. NEAT converges faster, but its ability to generalize is
not statistically different from other systems.
4
Findings and Categorization
在这个部分, we give a summary of the findings of the review protocol. 这 61 meth-
ods that fulfill the inclusion criteria and pass the quality assessment threshold are pre-
sented in Table 4 along with the obtained scores. Detailed answers to the three research
questions for all the methods are presented in the Appendix.
4.1 Categorization Based on the Encoding
首先, 表中 5, we present a categorization of NEAT’s successors based on
the employed encoding scheme, 那是, the way the mapping between GA’s genotype
Evolutionary Computation Volume 29, 数字 1
7
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
.
s
e
我
d
你
t
s
d
e
t
C
e
我
e
s
F
哦
s
e
r
哦
C
s
y
t
我
我
A
你
问
:
4
e
我
乙
A
时间
e
r
哦
C
S
F
e
右
y
d
你
t
S
e
r
哦
C
S
F
e
右
y
d
你
t
S
5
6
.
0
2
9
.
0
1
8
.
0
5
8
.
0
5
8
.
0
8
5
.
0
8
8
.
0
2
6
.
0
8
8
.
0
7
7
.
0
5
8
.
0
9
6
.
0
2
6
.
0
7
7
.
0
5
8
.
0
1
8
.
0
2
9
.
0
2
9
.
0
3
7
.
0
3
7
.
0
3
7
.
0
3
8
.
0
1
8
.
0
9
7
.
0
5
7
.
0
8
5
.
0
3
6
.
0
0
9
.
0
8
8
.
0
8
5
.
0
)
3
1
0
2
,
s
A
k
t
我
中号
d
n
A
你
哦
我
r
t
我
我
米
d
我
z
t
A
H
C
(
)
2
1
0
2
,
n
e
n
我
A
我
你
k
k
我
我
中号
d
n
A
我
H
哦
K
(
)
3
1
0
2
,
.
我
A
t
e
n
á
r
你
D
–
哦
G
e
我
我
A
G
(
)
3
1
0
2
,
y
e
我
n
A
t
S
d
n
A
H
G
你
磷
(
)
3
1
0
2
,
.
我
A
t
e
e
s
r
哦
中号
(
)
2
1
0
2
,
.
我
A
t
e
n
e
d
n
我
(
)
4
1
0
2
,
.
我
A
t
e
A
G
n
我
z
我
你
H
(
)
3
1
0
2
,
.
我
A
t
e
G
n
A
瓦
(
)
3
1
0
2
,
.
我
A
t
e
n
e
d
n
我
(
)
3
1
0
2
,
.
我
A
t
e
n
A
时间
(
2
v
时间
A
乙
氮
r
e
p
y
H
e
v
我
t
p
A
d
A
.
7
3
时间
A
乙
氮
r
e
p
y
H
G
磷
U
S
–
.
5
3
时间
A
乙
氮
r
e
p
y
H
–
S
S
中号
.
6
3
时间
A
乙
氮
–
磷
A
氮
S
.
4
3
s
d
我
e
fi
时间
A
乙
氮
.
3
3
s
d
我
e
我
F
时间
A
乙
氮
–
S
氮
F
.
0
4
时间
A
乙
氮
d
e
r
e
y
A
L
.
9
3
时间
A
乙
氮
d
e
s
A
H
磷
.
1
4
时间
C
C
–
时间
A
乙
氮
r
e
p
y
H
.
2
4
右
A
乙
氮
.
8
3
)
乙
2
1
0
2
,
y
e
我
n
A
t
S
d
n
A
我
s
我
右
(
时间
A
乙
氮
r
e
p
y
H
–
S
乙
e
v
我
t
p
A
d
A
.
2
3
)
5
1
0
2
,
s
s
e
你
G
r
A
H
d
n
A
s
C
我
s
C
n
A
乙
r
e
V
(
)
5
1
0
2
,
.
我
A
t
e
s
我
t
我
n
e
H
t
e
中号
(
–
时间
A
乙
氮
氮
磷
磷
C
–
乙
F
–
S
氮
.
4
4
时间
A
乙
氮
r
e
p
y
H
p
e
e
D
.
5
4
)
4
1
0
2
,
y
e
我
n
A
t
S
d
n
A
我
s
我
右
(
时间
A
乙
氮
r
e
p
y
H
)
e
v
我
t
p
A
d
A
(
d
e
d
e
e
S
.
3
4
)
6
1
0
2
,
n
e
n
我
A
我
你
k
k
我
我
中号
d
n
A
我
A
w
A
右
(
中号
我
–
中号
时间
S
L
–
时间
A
乙
氮
,
中号
时间
S
L
–
时间
A
乙
氮
.
2
5
)
5
1
0
2
,
.
我
A
t
e
哦
z
我
A
C
s
哦
L
(
)
5
1
0
2
,
.
我
A
t
e
n
我
e
t
S
(
)
5
1
0
2
,
.
我
A
t
e
A
v
我
我
S
(
)
6
1
0
2
,
.
我
A
t
e
A
v
我
我
S
(
)
6
1
0
2
,
.
我
A
t
e
哦
ñ
A
米
A
A
C
(
)
6
1
0
2
,
.
我
A
t
e
e
r
哦
p
A
r
A
时间
(
氮
磷
磷
C
s
e
t
我
我
乙
–
磷
A
中号
.
1
5
时间
A
乙
氮
–
S
F
磷
.
7
4
氮
氧
乙
G
我
磷
.
6
4
时间
A
乙
氮
d
哦
.
8
4
2
v
时间
A
乙
氮
d
哦
.
9
4
时间
A
乙
氮
–
t
.
0
5
)
6
1
0
2
,
n
e
n
我
A
我
你
k
k
我
我
中号
d
n
A
米
你
r
H
C
S
(
)
7
1
0
2
,
.
我
A
t
e
H
t
我
米
S
–
k
C
我
w
d
r
A
H
(
)
7
1
0
2
,
.
我
A
t
e
哦
我
我
你
z
r
A
中号
(
)
6
1
0
2
,
.
我
A
t
e
米
你
r
H
C
S
(
)
7
1
0
2
,
n
r
哦
D
d
n
A
我
C
s
我
r
G
(
)
7
1
0
2
,
.
我
A
t
e
A
v
我
我
S
(
)
A
7
1
0
2
,
我
我
e
s
e
D
(
)
7
1
0
2
,
.
我
A
t
e
G
G
A
H
(
)
7
1
0
2
,
.
我
A
t
e
G
n
e
磷
(
时间
A
乙
氮
r
e
p
y
H
–
乙
中号
.
4
5
L
时间
–
时间
A
乙
氮
–
S
磷
L
磷
.
5
5
时间
A
乙
氮
r
e
p
y
H
–
t
.
7
5
时间
A
乙
氮
氧
中号
时间
–
.
6
5
时间
A
乙
氮
中号
中号
–
.
3
5
S
G
磷
–
C
A
右
–
时间
A
乙
氮
.
0
6
X
乙
L
F
–
时间
A
乙
氮
.
1
6
时间
A
乙
氮
A
H
–
.
9
5
时间
C
A
X
乙
.
8
5
2
9
.
0
1
8
.
0
1
8
.
0
1
7
.
0
3
7
.
0
8
5
.
0
1
8
.
0
5
6
.
0
4
5
.
0
5
6
.
0
2
6
.
0
9
6
.
0
5
8
.
0
9
6
.
0
2
9
.
0
4
5
.
0
2
6
.
0
1
8
.
0
1
8
.
0
3
7
.
0
3
7
.
0
5
8
.
0
5
8
.
0
7
7
.
0
5
8
.
0
7
5
.
0
8
8
.
0
5
8
.
0
2
6
.
0
2
9
.
0
3
7
.
0
)
4
0
0
2
,
n
e
n
我
A
我
你
k
k
我
我
中号
d
n
A
y
e
我
n
A
t
S
(
时间
A
乙
氮
y
r
A
n
哦
我
t
你
我
哦
v
e
哦
C
)
A
6
0
0
2
,
e
n
哦
t
S
d
n
A
n
哦
s
e
t
我
H
瓦
(
)
6
0
0
2
,
.
我
A
t
e
y
哦
r
n
哦
中号
(
)
6
0
0
2
,
n
哦
哦
k
A
H
A
我
A
d
n
A
n
e
H
C
(
)
7
0
0
2
,
.
我
A
t
e
r
e
G
n
我
s
我
e
右
(
)
8
0
0
2
,
.
我
A
t
e
我
e
你
G
我
中号
(
)
9
0
0
2
,
.
我
A
t
e
y
e
我
n
A
t
S
(
)
7
0
0
2
,
.
我
A
t
e
哦
A
H
Z
(
)
4
0
0
2
,
.
我
A
t
e
r
e
G
n
我
s
我
e
右
(
)
5
0
0
2
,
.
我
A
t
e
n
哦
s
e
t
我
H
瓦
(
)
5
0
0
2
,
.
我
A
t
e
y
e
我
n
A
t
S
(
)
5
0
0
2
,
.
我
A
t
e
A
v
我
我
S
’
D
(
)
6
0
0
2
,
y
e
我
n
A
t
S
(
)
8
0
0
2
,
n
e
n
我
A
我
你
k
k
我
我
中号
d
n
A
我
C
e
ç
H
A
乙
(
)
8
0
0
2
,
y
e
我
n
A
t
S
d
n
A
哦
我
s
哦
r
乙
米
A
D
’
(
)
9
0
0
2
,
.
我
A
t
e
s
G
n
我
t
s
A
H
(
)
9
0
0
2
,
我
我
我
e
米
e
G
d
n
A
t
H
G
我
r
瓦
(
)
9
0
0
2
,
.
我
A
t
e
n
A
时间
(
问
+
时间
A
乙
氮
)
–
e
n
我
我
n
氧
(
–
时间
A
乙
氮
A
C
磷
A
L
时间
A
乙
氮
氮
磷
磷
C
–
时间
A
乙
氮
–
L
时间
A
乙
氮
r
A
我
你
d
哦
中号
时间
A
乙
氮
–
S
F
时间
A
乙
氮
t
r
2
v
时间
A
乙
氮
t
r
.
1
.
2
.
3
.
4
.
5
.
6
.
7
.
8
.
9
时间
A
乙
氮
r
e
p
y
H
t
n
e
G
A
我
t
我
你
中号
.
5
1
氮
氮
右
时间
C
–
时间
A
乙
氮
.
2
1
时间
A
乙
氮
r
e
p
y
H
.
3
1
–
时间
A
乙
氮
氮
磷
磷
C
–
L
时间
.
4
1
我
e
z
A
H
G
r
n
n
.
.
0
1
时间
A
乙
氮
氧
K
–
.
1
1
乙
氮
A
S
–
L
右
.
7
1
时间
A
乙
氮
D
F
–
.
8
1
时间
A
乙
氮
G
C
.
6
1
)
9
0
0
2
,
n
e
n
我
A
我
你
k
k
我
我
中号
d
n
A
我
H
哦
K
(
时间
A
乙
氮
–
e
d
A
C
s
A
C
/
F
乙
右
.
9
1
)
1
1
0
2
,
d
r
A
G
n
哦
乙
d
n
A
H
C
A
乙
r
e
你
A
(
时间
A
乙
氮
氮
磷
磷
C
–
t
n
e
r
r
你
C
e
右
.
3
2
)
9
0
0
2
,
你
H
C
d
n
A
t
t
e
G
G
A
H
(
)
0
1
0
2
,
.
我
A
t
e
e
n
哦
米
A
d
r
A
C
(
)
0
1
0
2
,
y
e
我
n
A
t
S
d
n
A
我
s
我
右
(
时间
A
乙
氮
r
e
p
y
H
e
v
我
t
p
A
d
A
.
1
2
时间
A
乙
氮
)
–
t
r
(
e
n
我
我
n
氧
.
2
2
时间
A
乙
氮
氧
中号
–
.
0
2
)
1
1
0
2
,
.
我
A
t
e
哦
我
s
哦
r
乙
米
A
D
’
(
2
v
时间
A
乙
氮
r
e
p
y
H
t
n
e
G
A
我
t
我
你
中号
.
4
2
)
1
1
0
2
,
y
e
我
n
A
t
S
d
n
A
s
C
我
s
C
n
A
乙
r
e
V
(
氧
乙
L
–
时间
A
乙
氮
r
e
p
y
H
.
5
2
)
A
1
1
0
2
,
y
e
我
n
A
t
S
d
n
A
n
A
米
H
e
L
(
)
2
1
0
2
,
H
s
我
A
瓦
d
n
A
G
n
我
n
n
A
中号
(
)
1
1
0
2
,
.
我
A
t
e
e
n
你
C
我
(
)
2
1
0
2
,
.
我
A
t
e
t
H
G
我
r
瓦
(
时间
A
乙
氮
y
t
我
e
v
哦
氮
.
7
2
D
我
r
乙
y
H
H
C
t
我
w
S
.
8
2
时间
A
乙
氮
–
F
F
中号
.
9
2
时间
A
乙
氮
–
乙
S
F
我
.
6
2
)
A
2
1
0
2
,
y
e
我
n
A
t
S
d
n
A
我
s
我
右
(
)
氧
乙
L
–
(
时间
A
乙
氮
r
e
p
y
H
–
S
乙
.
0
3
)
2
1
0
2
,
H
A
ˇc
r
K
(
时间
A
乙
氮
n
y
D
.
1
3
8
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
桌子 5: Encoding used by each method.
Direct Encoding
(Stanley and Miikkulainen, 2002乙, 2004; Reisinger et al., 2004; Whiteson
等人。, 2005; Stanley et al., 2005; D’Silva et al., 2005; 斯坦利, 2006;
Whiteson and Stone, 2006A; Monroy et al., 2006; Chen and Alahakoon,
2006; Reisinger et al., 2007; 赵等人。, 2007; Miguel et al., 2008; Bahçeci
and Miikkulainen, 2008; Hastings et al., 2009; Wright and Gemelli, 2009;
Tan et al., 2009; Kohl and Miikkulainen, 2009; Haggett and Chu, 2009;
Cardamone et al., 2010; Auerbach and Bongard, 2011; Wright et al., 2012;
Lehman and Stanley, 2011A; Manning and Walsh, 2012; Krˇcah, 2012; Kohl
and Miikkulainen, 2012; Chatzidimitriou and Mitkas, 2013; 王等人。,
2013; Inden et al., 2013; Tan et al., 2013; Methenitis et al., 2015; Stein et al.,
2015; Loscalzo et al., 2015; Silva et al., 2015, 2016; Caamaño et al., 2016;
Rawal and Miikkulainen, 2016; Schrum and Miikkulainen, 2016;
Hardwick-Smith et al., 2017; Marzullo et al., 2017; Desell, 2017A; Hagg
等人。, 2017; 彭等人。, 2017; Grisci and Dorn, 2017)
(Stanley et al., 2009; D’Ambrosio and Stanley, 2008; Risi and Stanley, 2010;
Auerbach and Bongard, 2011; D’Ambrosio et al., 2011; Verbancsics and
斯坦利, 2011; Risi and Stanley, 2012A, 2012乙; Inden et al., 2012; Morse
等人。, 2013; Pugh and Stanley, 2013; Gallego-Durán et al., 2013; 惠津加
等人。, 2014; Risi and Stanley, 2014; Verbancsics and Harguess, 2015;
Tarapore et al., 2016; Schrum et al., 2016; Silva et al., 2017)
Indirect Encoding
Hybrid
(Clune et al., 2011)
and ANN’s phenotype happens. We identify three types of encoding: direct, 间接,
and hybrid.
Direct encoding refers to a one-to-one mapping between the genotype and the phe-
notype, such as NEAT’s node and connection genes described in Section 3.2. 上
另一方面, in indirect encoding a set of rules is used to map the genotype to the
表型. Compositional Pattern Producing Networks (CPPN) (斯坦利, 2007), 的-
tails presented in the Appendix, are an example of indirect encoding (Stanley et al.,
2019). CPPN, which behave as ANNs, can be evolved by NEAT to output a spatial
pattern in the hyperspace which corresponds to a connectivity pattern in a substrate of
节点. Hybrid encoding refers to an alternation between direct and indirect encoding.
Analyzing how the ANNs are encoded in the genotype, we found that approxi-
mately two-thirds of the methods use direct encoding, while one method proposes a hy-
brid encoding. Most of the methods with direct encoding use NEAT’s encoding without
modifications. 然而, there are methods that modify it by adding new fields accord-
ing to the characteristics of the proposed method. The methods using indirect encoding
either propose a new type of encoding or use HyperNEAT’s encoding. When necessary,
modifications on HyperNEAT’s encoding are made to meet the requirements of the pro-
posed method, 例如, by changing the initial topology of the CPPNs to include
more input, 输出, or hidden nodes.
4.2
Proposed Categorization Scheme
Although NE methods can be traditionally categorized based on the encoding used
for mapping the genotype to the phenotype, as presented in Section 4.1, in this ar-
ticle we perform a more fine-grained classification. Based on three criteria presented
下一个, the NE methods are classified into three clusters, each of which consists of a
Evolutionary Computation Volume 29, 数字 1
9
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
number of subclusters that result in 18 subclusters in total. We started the categorization
from subclusters that considered research questions we wanted to address and then we
regrouped them in a higher level of clusters to increase the readability and get a more
structured cluster description.
• Cluster 1: methods that consider issues relevant to the search space or the fitness
景观. This cluster is about properties of the search space and the fitness
landscape and not about descriptive features of a certain method.
• Cluster 2: hybrid methods, 那是, methods that employ principles from NE and
another field of EC or Machine Learning (机器学习).
• Cluster 3: methods that evolve ANNs with particular properties.
4.2.1 Cluster 1: Issues Specific to the Search Space and the Landscape
NE methods are classified into the following subclusters based on which search
space/landscape issues they solve, which include:
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
• a problem/search space with multiple objectives. A multiobjective optimization
task is a domain where the simultaneous optimization of multiple conflicting
objectives is required (Branke et al., 2008).
• a search space characterized by many irrelevant or redundant features. A feature
is a measurable property or characteristic that is used to describe a task (Bishop,
2006). 这样, the instances of a problem are represented as multidimen-
sional points in an n-dimensional space (where n is the number of features
describing the problem), which is difficult to search.
• a deceptive landscape. A landscape is deceptive when the population of the GA
is misguided away from the objective (Horn and Goldberg, 1995). 在这种情况下,
a fitness function deceives the search by pointing the wrong way.
• a landscape characterized by uncertainty. An uncertain landscape is one where
the fitness functions’ optimum changes rapidly between generations (Krˇcah,
2012).
• a search space of an open-ended problem, i.e. a problem whose final solu-
tion is not finite (Stanley and Miikkulainen, 2004) and for which more com-
丛 (Maley, 1999) 和小说 (Standish, 2003) solutions are continuously
生成的.
• a space where evolution takes place online or in real time. In online evolution
an ANN is evolved spontaneously without having prior information of the
whole environment or task. This is in contrast with offline evolution when all
the information is available from the beginning and the ANN is evolved before
its final application to the target task. In real-time evolution, a constraint of the
time for generating a solution exists. According to Cardamone et al. (2010),
online evolution focuses on maximizing an agent’s performance during the
whole learning process, whereas real-time evolution aims to find a group of
agents that perform well as fast as possible.
10
Evolutionary Computation Volume 29, 数字 1
A Systematic Review of NEAT’s Successors
4.2.2 Cluster 2: Hybrid NE Methods
These methods combine NE principles with methods from the following fields:
• Evolutionary Computation (EC)
• Backpropagation (血压)
• Reinforcement Learning (RL)
• Unsupervised Learning (UL)
4.2.3 Cluster 3: Evolving ANNs with Particular Properties
NE methods that can evolve ANNs with particular characteristics belong to this cluster.
These properties include:
• modularity. A network is modular if it contains “highly connected clusters of
nodes that are sparsely connected to nodes in other clusters” (Clune et al.,
2013). A modular network consists of independent functional structures that
can be separately optimized (Kashtan and Alon, 2005), can operate on separate
inputs to perform a sub-task and are organized by an intermediary to produce
the network’s output (Azam, 2000).
• plasticity. An ANN is plastic when its connections’ weights do not remain static
during their lifetime but can change in response to the changing activation
levels in the neurons they connect (Risi and Stanley, 2010).
• transfer learning ability, 那是, transferring knowledge that is learned on one
task to another one (Bahçeci and Miikkulainen, 2008).
• automatic ANN substrate configuration. This refers to methods that evolve not
only the weights of a large scale ANN substrate, but also its topography, 那
是, the density and placement of neurons (Risi and Stanley, 2012A). Substrate is
a specific terminology introduced in HyperNEAT (Stanley et al., 2009). 为一个
detailed description please see Section A.13 in the Appendix.
• different types of nodes, 那是, ANNs with nodes that are different than the
sigmoid neuron units.
• large scale topologies, evolving large ANNs that define a high-dimensional
search space. In this category we also include ANNs with a large number of in-
put and output nodes to solve problems with high-dimensional input/output
空间.
• deep architectures. We refer to methods optimizing parameters of deep ANNs
(DNNs).
• memory capacity. Augmenting an ANN with memory is essential for sequential
problems requiring long-term memory.
4.3
The x-NEAT Methods
The classification of the x-NEAT methods found by the review protocol is presented in
桌子 6; only two methods, TMO-NEAT (Marzullo et al., 2017) and Cascade-NEAT (Kohl
Evolutionary Computation Volume 29, 数字 1
11
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
.
s
d
哦
H
t
e
米
时间
A
乙
氮
–
X
e
H
t
F
哦
n
哦
我
t
A
z
我
r
哦
G
e
t
A
C
d
e
s
哦
p
哦
r
磷
:
6
e
我
乙
A
时间
12
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
数字 1: The trajectory of evolution of x-NEAT methods.
and Miikkulainen, 2009), could not be categorized into any of the proposed clusters. 它
should be noted that this table is not an exhaustive list of all the methods in the field,
just the ones that are returned by the inclusion and selection criteria of the protocol.
The table is preferably read column-wise: a single tick in a column does not at all mean
Evolutionary Computation Volume 29, 数字 1
13
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
that the indicated paper is the only paper addressing the category. In the Appendix,
we present detailed answers of the three RQs (原则, encoding, 和评价) 为了
each method. 数字 1 presents the trajectory of the x-NEAT methods’ evolution. 这
is a graphical illustration of how x-NEAT methods emerged from the original NEAT
方法, 那是, which method is being extended by another.
4.4 Reference Tables for Benchmarking
Tables 8, 9, 和 10 in the Appendix present the domains/datasets/tasks on which the x-
NEAT methods of this review article are tested and the used performance metrics. 每个
dataset has one or more references that correspond to the x-NEAT method that employs
它. 在某些情况下, the original source of the dataset was available and this is included as
the last citation in the list of provided citations. These tables can help researchers to pick
up the method that is most suitable for their problem and find its detailed description
in the Appendix. 还, it facilitates comparing and benchmarking new or existing NE
methods by choosing the dataset and the performance metric used in the state of the
艺术.
5 讨论, Open Issues, and Future Perspectives
5.1 Why NEAT Inspired the Different Extensions
After the invention of NEAT, many methods have appeared that extend its function-
ality in various ways. We believe that the reason for this expansion is because NEAT
is an easily understandable algorithm that works well on difficult problems and many
researchers made its implementation publicly available. 而且, we attribute this ex-
pansion to the fundamental importance of the NEAT principles, detailed in Section 3.
NEAT incorporates specific biological principles (Stanley and Miikkulainen, 2002乙) 那
have contributed to its success. The evolutionary process in NEAT resembles the pro-
cess of natural evolution, as the evolved networks become more complex during their
优化. As in NEAT, the genome in nature does not have a fixed length, but new
genes have been added during evolution through a process known as gene amplifi-
阳离子 (Darnell and Doolittle, 1986; 沃森, 2004). 而且, the solution that NEAT
provides to the competing conventions problem is also inspired by natural evolution
and in particular by the synapsis process, 那是, the process of lining up homologous
genes before crossover (Radding, 1982; Sigal and Alberts, 1972). 相似地, the specia-
tion mechanism is inspired from nature’s speciation mechanism that groups together
individuals that share a common characteristic and implicitly protects innovation since
the different species compete within their own niche (Stanley and Miikkulainen, 2002乙).
Although speciation as a notion was known in GAs, it was NEAT which introduced it in
the TWEANNs, since NEAT offered a solution to the competing conventions problem
with the use of historical markings. Before this solution, the definition of a compati-
bility metric, necessary for assigning individuals into species, was difficult to define.
As far as the notion of evolving minimal architectures is concerned, before NEAT there
were already attempts to control the size of the evolved topologies by including penal-
ties in the fitness function. 然而, these attempts had the disadvantages of having
to predefine the penalty and risking to have a different performance from the original
non-penalized fitness function (Stanley and Miikkulainen, 2002乙). By keeping the
topologies minimal throughout evolution, NEAT tends to minimize the search space
and to speed up the learning process (Stanley and Miikkulainen, 2002乙). Before NEAT,
starting with a uniform minimal population was not possible. 反而, TWEANNs
14
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
started the evolution with topologically diversified networks because without speci-
ation topological innovations could not survive (Stanley and Miikkulainen, 2002乙). 在
另一方面, speciation in NEAT enabled the evolution to start minimally and di-
versify along evolution, since topological innovations would be protected. In conclu-
锡安, NEAT tackled problems known in the community in a unified and fundamentally
strong manner.
A clear indication of how fundamentally important and globally applicable the
NEAT principles are, can be found in the existence of a large number of papers whose
method is inspired by the NEAT principles in, 例如, NE with ontogeny (Inden,
2008), Genetic Programming (Drchal and Šnorek, 2013; Drchal and Snorek, 2012; Tru-
jillo et al., 2016), and molecular programming (Dinh et al., 2014). Neat-GP (Trujillo et al.,
2016) is an example of a method that adopts NEAT’s principles (minimal topology ini-
tialization, speciation with fitness sharing and crossover by identifying the matching
topologies) for evolving programs in Genetic Programming (GP) for regression and
classification tasks. Neat-GP was able to achieve or improve the test fitness performance
of standard GP while evolving smaller programs and reducing the computational cost
and it shows that NEAT principles are fundamental and can be extended beyond neural
网络.
5.2
Findings of the Review and Recommendations
From the tables provided in the Appendix of this review article as well as from Table
7, we can conclude that comparing the performance of different x-NEAT methods is
difficult, as even methods belonging to the same subcluster are not all evaluated on the
same datasets and do not employ the same performance metrics.
Different Performance Metrics. The majority of the methods report on the algorithm’s
performance using the obtained fitness value. Similar metrics include the accuracy, 这
average error and the absolute error. Most of the methods obtain the mean value of
these metrics calculated over the different algorithmic runs. Another metric is the ratio
of runs when the algorithm was successful in solving the problem. 还, 大多数
of the methods report metrics to describe the algorithm’s efficiency such as the number
of generations and the computational time. Metrics describing the size of the evolved
networks are also very common, 例如, the number of evolved nodes and con-
连接. Some methods are evaluated based on qualitative metrics, i.e. based on the
user’s interpretation of the evolved patterns and the agents’ evolved behavior or mor-
phology. Other papers evaluate the generalization ability of the proposed algorithm by
testing the best ANN on a different task with different initial conditions. 最后, 指标
to evaluate a specific characteristic of a method are proposed, such as the ratio between
relevant and irrelevant features or the sum of absolute weights for methods performing
feature selection, the number of agents that are dominated for coevolutionary methods
和别的.
Performance Comparisons. Even though a newly proposed method that brings new
insights in the field has a great value in its own, we observed that many research papers
also compare their methods to other ones using a wide set of datasets and performance
指标. We believe that in order to facilitate comparisons, a good practice would be
to report performance on a minimal set of universal performance metrics. Regarding
the algorithms’ performance, the accuracy, precision, 记起, and confusion matrix for
classification tasks and the accumulated reward for identical reinforcement learning
Evolutionary Computation Volume 29, 数字 1
15
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
桌子 7: Table summarizing an x-NEAT method’s categorization to clusters, the method
it extends, and its comparisons to the state of the art (either to an existing x-NEAT al-
gorithm or to an algorithm from the fields of ML/NE/EC).
Cluster
Extends
x-NEAT
ML/NE/EC
Compared to
方法
RBF-NEAT
Different node types
整洁的
整洁的
SNAP-NEAT
Different node types
RBF-NEAT
Cascade-NEAT
NoveltyNEAT
Deceptive landscape NEAT
Open ended
整洁的
RBF-NEAT
Cascade-NEAT
整洁的
NEAT-CTRNN
DynNEAT
Fitness uncertainty
整洁的
整洁的
NEAT-LSTM-IM
Deceptive landscape NEAT-LSTM
UL
Different node types
Memory Capacity
NEAT-LSTM
NEAT-RNN
Coevolutionary NEAT Open ended
整洁的
Fixed Topology
Coevolutionary NEAT
Simplifying
Coevolutionary NEAT
NEAT-HOF
LAPCA-NEAT
Open ended
Open ended
Multiple objectives
Plastic NNs
Multiple objectives
Modular NNs
整洁的
整洁的
整洁的
整洁的
nnrg.hazel
MO-NEAT
MM-NEAT
FS-NEAT
FD-NEAT
Irrelevant features
整洁的
整洁的
Irrelevant features
整洁的
IFSE-NEAT
Irrelevant features
整洁的
Layered NEAT
Irrelevant features
整洁的
PFS-NEAT
Irrelevant features
整洁的
Phased NEAT
Irrelevant features
整洁的
整洁的
FS-NEAT
整洁的
FS-NEAT
整洁的
FD-NEAT
整洁的
FS-NEAT
FD-NEAT
SAFS-NEAT
整洁的
FD-NEAT
√
√
√
√
√
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
rtNEAT
rtNEATv2
Online NEAT+Q
Online/Real time
整洁的
Online/Real time
rtNEAT
rtNEAT
NEAT+Q
Online/Real time
EC
血压
RL
整洁的
NEAT+Q
softmax NEAT+Q
softmax NEAT
16
Evolutionary Computation Volume 29, 数字 1
A Systematic Review of NEAT’s Successors
方法
KO-NEAT
桌子 7: Continued.
Cluster
Extends
x-NEAT
ML/NE/EC
Compared to
Online/Real time
EC
RL
整洁的
整洁的
cgNEAT
Online/Real time
Online NEAT
Online rtNEAT
Online/Real time
RL
NNs with Transfer Learning
Online/Real time
RL
NNs with Transfer Learning
整洁的
整洁的
rtNEAT
整洁的
rtNEAT
Online rtNEAT
整洁的
rtNEAT
Online NEAT
odNEAT
Online/Real time
整洁的
rtNEAT
odNEATv2
Online/Real time
odNEAT
odNEAT
HyperNEAT
Large Topologies
CPPN-NEAT
PNEAT
Switch HybrID
Large Topologies
NEAT+Q
NEAR
FNS-NEATFields
NS-FE-CPPN-NEAT
EC
血压
RL
EC
RL
Different node types
NNs with memory
Deceptive landscape
EC
Large Topologies
Deceptive landscape
EC
Different node types
PIGEON
L-NEAT
EC
血压
DeepHyperNEAT
血压
Deep NNs
EXACT
RL-SANE
NEAT-RAC-PGS
NEAT-FLEX
ES-HyperNEAT
血压
Different node types
Deep NNs
RL
RL
UL
Automatic Substrate
Configuration
Large Topologies
FT-NEAT
HyperNEAT
FT-NEAT
HyperNEAT
整洁的
整洁的
整洁的
整洁的
NEATFields
NEATFields
CPPN-NEAT NS-CPPN-NEAT
CPPN-NEAT
整洁的
PSO
整洁的
整洁的
整洁的
HyperNEAT HyperNEAT
整洁的
EXACTv1
BS-NEAT
RL-SANE
整洁的
整洁的
整洁的
HyperNEAT HyperNEAT
√
√
√
√
√
√
√
√
√
√
Evolutionary Computation Volume 29, 数字 1
17
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
方法
Cluster
Extends
x-NEAT
ML/NE/EC
桌子 7: Continued.
Compared to
ES-HyperNEAT-LEO
Adaptive
ES-HyperNEAT
MSS-HyperNEAT
Modular NEAT
HyperNEAT-LEO
Automatic Substrate
Configuration
Large Topologies
Modular NNs
Automatic Substrate
Configuration
Large Topologies
Plastic NNs
Automatic Substrate
Configuration
Large Topologies
Modular NNs
Large Topologies
Modular NNs
Large Topologies
HyperNEAT-LEO
ES-HyperNEAT
HyperNEAT-
LEO
Adaptive HyperNEAT
ES-HyperNEAT
ES-HyperNEAT
HyperNEAT
HyperNEAT
整洁的
整洁的
HyperNEAT
HyperNEAT
MFF-NEAT
Modular NNs
整洁的
整洁的
HyperNEAT-CCT
MB-HyperNEAT
Modular NNs
Large Topologies
HyperNEAT-LEO
Modular NNs
Large Topologies
HyperNEAT
MM-NEAT
NEAT-CTRNN
τ -NEAT
τ -HyperNEAT
NEAT-LSTM
TL-CPPN-NEAT
NNs with memory
Different node types
整洁的
NNs with memory
整洁的
NNs with memory
Large topologies
τ -NEAT
HyperNEAT
NNs with memory
Different node types
整洁的
NEAT-RNN
NEAT-LSTM-IM
NNs with
Transfer Learning
Different node types
CPPN-NEAT
CPPN-NEAT
PLPS-NEAT-TL
NNs with
Transfer Learning
整洁的
Phased NEAT
GPS-NEAT
BS-NEAT
Adaptive HyperNEAT
Plastic NNs
Large Topologies
HyperNEAT
Adaptive HyperNEATv2 Plastic NNs
Adaptive HyperNEAT Adaptive
Large Topologies
Seeded Adaptive
HyperNEAT
Plastic NNs
Large Topologies
Adaptive HyperNEAT
Seeded HyperNEAT
HyperNEAT
Seeded
HyperNEAT
HyperNEAT
CPPN-NEAT
Different node types NEAT
Recurrent CPPN-NEAT
Different node types CPPN-NEAT
CPPN-NEAT
HyperNEAT
HyperNEAT-GS
Multiagent
HyperNEATv2
HyperNEAT
整洁的
整洁的
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
√
√
√
18
Evolutionary Computation Volume 29, 数字 1
A Systematic Review of NEAT’s Successors
方法
HA-NEAT
SUPG-HyperNEAT
MAP-Elites CPPN
桌子 7: Continued.
Compared to
Cluster
Extends
x-NEAT
ML/NE/EC
Different node types NEAT
整洁的
Different node types
Large Topologies
Deceptive landscape
Different node types
EC
HyperNEAT
HyperNEAT
CPPN-NEAT
direct encoding
MAP-Elites
Multiagent HyperNEAT
Large Topologies
HyperNEAT
HyperNEAT
Multiagent
HyperNEATv2
Large Topologies
Multiagent
HyperNEAT
Multiagent
HyperNEAT
NEATFields
Large Topologies
HyperNEAT
HyperNEAT
Seeded HyperNEAT
Large Topologies
HyperNEAT
Seeded Adaptive
HyperNEAT
HyperNEAT
√
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
tasks should be reported and be accompanied by statistical tests to indicate whether
differences in performance are significant or not. In the papers reviewed in this study,
a statistical hypothesis test had been conducted in around 60% of the cases. 而且,
although it is a computationally demanding task, another good practice would be to
evaluate the generalization ability of an algorithm on an independent test, either by
performing k-fold cross validation in supervised learning tasks or testing on different
versions of a reinforcement learning task and/or with different initial conditions. 关于-
porting on the values of a fitness function might be valuable in specific cases but it
is not necessarily useful in all scenarios, since different definitions of fitness functions
can result in different outcomes. Regarding the efficiency of a method, 的数量
generations until convergence or until the best solution is found (maximal or mini-
mal fitness value) should be reported as well. Reporting on the computational time
can be informative but depends on the computational power of a computing machine
as well as on the employed processing schemes and it does not allow for direct com-
parisons among different methods. x-NEAT methods that evolve the topology of an
神经网络, like the ones extending NEAT and the ones that automatically configure the sub-
strate of the HyperNEAT-based methods should be additionally evaluated on the size
of evolved networks, 那是, the number of connections and hidden nodes. Agreeing
on a set of performance metrics does not exclude the use of other extra metrics if neces-
sary for characterizing the performance of a specific property of an algorithm. 虽然
we stress the importance of comparisons and benchmarking, this does not mean that
this is always the most important aspect of an algorithm (斯坦利, 2018). Papers that
propose new research directions or provide insights are of great value as well. As it
is stated in Stanley (2018), “While a good algorithm is sometimes one that performs
出色地, sometimes a good algorithm is instead one that leads to other algorithms and new
frontiers.”
数据集. Although some datasets are commonly used among x-NEAT methods of
the same or of different subclusters such as the XOR, the pole balancing, the retina
Evolutionary Computation Volume 29, 数字 1
19
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
classification problems, ETC。, in general x-NEAT methods belonging to the same clus-
ter are compared on different problems. Combined with the different employed perfor-
mance metrics as illustrated above, it is evident that direct comparisons among different
methods become very difficult. More standardization and the use of benchmark prob-
lems is required. This article provides an overview of the datasets used in the methods
included in the review but an analysis of the datasets and the proposal of a minimal set
that is suitable for benchmarking should be addressed in future work.
Parameter Configuration. All x-NEAT methods depend on a large number of parame-
特尔斯. The majority of the methods presented in this review article report on the employed
参数, while the rest of the papers either include a small portion (例如, the size of
the population or the allowed number of generations) or do not report them at all. 如何-
曾经, these parameters are usually configured by trial and error or by reusing previously
defined default parameter settings and not by systematically searching the parameter
space using intelligent optimization methods. Another issue concerns how parameters
should be configured when a method is compared to the state of the art. Optimizing the
parameters for the proposed method and then comparing to the old method may cause
a bias toward favoring the new method. Optimizing the parameters of the old method
and using these on the new method may cause less bias. 另一方面, optimiz-
ing the parameters of the two methods separately and comparing the methods on their
best performance seems to be the right option. 然而, it is not very often observed
in literature.
Comparison to the State of the Art. During the evaluation process of each paper, 我们
observed that only one-quarter of the methods perform a (部分的) comparison of the
proposed NEAT-based method to another algorithm from EC or an algorithm from an-
other field of computer science, such as ML. This is evident from Table 7. It clearly shows
the trend that most of the papers follow: omitting the performance comparison of the
proposed algorithm to other methods that may exist in other fields. 此外, 什么时候
a method is proposed to solve a problem from a specific domain or a specific dataset,
it should be compared to existing algorithms even though they belong to another cat-
egory of methods, 例如, to a classifier from ML or a GA from EC. 而且,
although a method is proposed to solve a specific task, it would be interesting to see
how the method performs on other datasets. One of the main questions is how to select
the appropriate baseline methods for comparison. The clustering proposed in this ar-
ticle might give an answer. Future studies that propose a new x-NEAT method should
therefore use Figure 2 和表 6 to position their new method in an existing subcluster
and compare against the state-of-the-art methods of that subcluster. If a new x-NEAT
method does not belong to an existing cluster, 一个新的 (子)-cluster should be created. 这是
evident from Table 7 that until now many methods are proposed to deal with a problem
that is tackled by another x-NEAT algorithm of the same subcluster, but no exhaustive
comparisons are performed against the rest of the methods of this subcluster, only to
NEAT or to the NEAT-based algorithm that is extended. This shows how important it is
to be aware of the state of the art and of the clustering approach tackled by our article.
5.3 Current Perspectives
The main advantage of a systematic review is that it is performed based on a proto-
col that is reproducible. 而且, deciding which papers should be included is based
20
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
数字 2: Histogram of the number of papers per year in WoS and Scopus.
on clearly defined criteria and evaluation scores and not on the authors’ opinions.
然而, one limitation is that the decision of whether a paper should be excluded is
based on its abstract. 所以, papers whose abstracts or keywords did not include a
reference to NEAT or even the fact that they are extending NEAT, are not included in this
review. 而且, some other methods can exist in databases other than the Web of Sci-
ence or Scopus, although most of the high-quality papers are included in these two. 我们
should therefore note that Table 6 does not include an exhaustive list of all the methods
that belong to each cluster. Other methods may exist that can either be based on NEAT
or employ algorithms independent of NEAT, but they are not included because they do
not fulfill the criteria raised by the protocol. Additional methods have been published
after the day we last searched the databases on 18 四月 2018 and these are not included
in this review article. A search performed in Web of Science and Scopus on the 18 七月
2019 for papers published after January 2018, resulted into 35 出版物. Applying
only the inclusion/exclusion criteria and not the evaluation criteria resulted in 17 rele-
vant papers. These concern x-NEAT methods belonging to the three clusters defined in
the paper, 例如, multiobjective optimization (Ihara and Kato, 2017; Künzel and
Meyer-Nieberg, 2018; Chidambaran et al., 2018), evolving ANNs for sequential tasks
with memory requirements (Merrild et al., 2018; ElSaid et al., 2019), hybrid NE meth-
消耗臭氧层物质 (Nadkarni and Neves, 2018; 彭等人。, 2018; McDonnell et al., 2018), optimizing
ANNs with different types of nodes (Papavasileiou and Jansen, 2017; Sboev et al., 2018),
optimizing deep learning structures (Desell, 2018), ETC.
In the graph of Figure 2 we present the number of published papers in WoS and
Scopus following NEAT in 2002. We chose to show not only the number of meth-
ods proposed to extend NEAT in the ways we present in this article and in the Ap-
pendix, but also the number of papers that are applications of an x-NEAT method to a
Evolutionary Computation Volume 29, 数字 1
21
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
challenging problem. Eighteen years after NEAT we can still see its relevance as the
number of published papers extending or applying x-NEAT methods seems to increase.
5.4
Future Perspectives
We believe that especially nowadays in the era of deep learning, NEAT-based algo-
rithms can contribute significantly to the configuration of the DNN. This potential is al-
ready evident in literature as hybrid methods of deep learning and NE have emerged.
The papers (Schrum, 2018; Miikkulainen et al., 2019; Costa et al., 2019) are examples
of x-NEAT methods for evolving DNNs. Especially, DeepNEAT and CoDeepNEAT
(Miikkulainen et al., 2019) are two very promising x-NEAT methods (305 citations in
Google Scholar) for optimizing the structure of DNNs. DeepNEAT follows the prin-
ciples of standard NEAT, 那是, an initial population of chromosomes, 代表
by graphs is complexified during evolution by gradually adding structure (edges and
节点) through mutation operators. Crossover is facilitated by historical markings and
speciation is applied to protect innovation. The differences between NEAT and deep-
NEAT are: each gene in the chromosome represents a layer of a DNN, with a table de-
scribing its hyperparameters, instead of representing a node of an ANN. 而且, 这
edges in the chromosome do not include weights but only indications of the layers’
连接性. During fitness evaluation the chromosome is decoded into a DNN that is
trained for a fixed number of epochs. Coevolution DeepNEAT (CoDeepNEAT) is an al-
gorithm optimizing the structure of DNNs inspired by principles of SANE (Moriarty,
1997), ESP (Gomez and Miikkulainen, 1999), and CoSyNE (Gomez et al., 2008). CoDeep-
NEAT generates repetitive modular structure by evolving two populations of modules
and blueprints with coevolution. Each blueprint is a pointer to a module representing
a small DNN. These DNNs are combined to create a larger network. We have the opin-
ion that coevolution of two populations or within the individuals of one population is
a powerful technique that NEAT-based successors should consider in the future, 埃斯佩-
cially when aiming into reaching open-ended evolution (Stanley et al., 2017).
Quality Diversity (QD) algorithms also have potential applications to open-ended
问题 (Pugh et al., 2016; 王等人。, 2019). QD algorithms search a behavioral space
to find a large set of solutions that are simultaneously diverse and high-performing
(Cully and Demiris, 2017). We believe that novelty search with local competition (NSLC)
(Lehman and Stanley, 2011乙) and multidimensional archive of phenotype elites (MAP-
Elites) (Mouret and Clune, 2015) are two QD algorithms that constitute another inter-
esting research area where NEAT-based successors could focus on in the future.
NEAT is a complex method coming from intertwining three principles. Ablation
studies showed that each component of NEAT is crucial to its performance (斯坦利
and Miikkulainen, 2002乙). 然而, since then, research has provided many power-
ful works such as quality diversity methods (Lehman and Stanley, 2011乙; Mouret and
克鲁恩, 2015), age fitness Pareto optimization (Schmidt and Lipson, 2011), and others that
might raise the question of revisiting these ablation studies and investigating whether
each component is really necessary when NEAT is applied in these types of cases. 为了
例子, in Mouret and Doncieux (2012), a NE algorithm that employs only the encod-
ing part of NEAT, NEAT’s structural mutation operations (no crossover) and NSGA-II
(Deb et al., 2002) with an objective rewarding exploration, performs better.
6 结论
Eighteen years after NEAT’s invention, a plethora of successors have appeared. 我们的
review protocol identified 60 methods that met the inclusion criteria and passed the
22
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
quality assessment threshold. These methods allow us to identify relevant features,
perform real time and/or online evolution, optimize multiple objectives, accelerate the
computational performance, increase the interpretability of the evolved networks, 和
allow applications on search spaces with issues including high dimensionality and
deceptive landscapes. NEAT is extended by modifications that include: introducing
new mutation operators, evolving different types of neural nodes, adding new fields
in NEAT’s direct encoding, introducing new types of encoding (例如, 发展性的),
applying different selection strategies, changing the way by which the population is
进化的 (例如, evolving subnets, coevolving two populations), ETC. As supplementary
材料, readers can find a graphical tool on our website3 that uses the 18 subclusters
defined in this article to guide them in choosing a method that satisfies their needs.
This article and the graphical tool can be therefore used as an index to the Appendix of
this article where readers can find the description of the method and its reference to the
original paper.
To facilitate benchmarking and comparisons, we believe that methods belonging
to the same subcluster should be evaluated on the same tasks and should report on
the same performance metrics. As a future work, it would be relevant to categorize
the datasets/tasks of each subcluster to propose a set of benchmark tasks. 组合
with the outcome of this article, researchers will then have all the relevant information
to benchmark and compare a new method using the same state-of-the-art benchmark
test sets and the same performance metrics. 最后, we hope that with this article we
can stimulate similar review papers in other areas of EC, 例如, in multiobjective
optimization for NSGA-II (Deb et al., 2002) or in Evolutionary Strategy for CMA-ES
(Hansen and Ostermeier, 2001).
Acknowledgment
Evgenia Papavasileiou was funded by a PhD grant from the Research Foundation Flan-
德斯 (FWO) (scholarship numbers 1S34016N, 1S34018N).
参考
奥尔巴赫, J. E., and Bongard, J. C. (2010). Dynamic resolution in the co-evolution of morphol-
ogy and control. In Artificial Life XII: Proceedings of the Twelfth International Conference on the
Synthesis and Simulation of Living Systems, PP. 451–458.
奥尔巴赫, J. E., and Bongard, J. C. (2011). Evolving complete robots with cppn-NEAT: The utility
of recurrent connections. In Proceedings of the 13th Annual Conference on Genetic and Evolution-
ary Computation, PP. 1475–1482.
Azam, F. (2000). Biologically inspired modular neural networks. 博士论文, Virginia Tech.
Bahçeci, E., and Miikkulainen, 右. (2008). Transfer of evolved pattern-based heuristics in games.
在 2008 IEEE Symposium on Computational Intelligence and Games, PP. 220–227.
Bettany-Saltikov, J. (2010). Learning how to undertake a systematic review: 部分 1. Nursing Stan-
dard, 24(50):47–55.
Bishop, C. 中号. (2006). Pattern recognition and machine learning. 柏林: 施普林格.
3www.neatreview.online
Evolutionary Computation Volume 29, 数字 1
23
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
Box, G. E., Jenkins, G. M。, Reinsel, G. C。, and Ljung, G. 中号. (2015). Time series analysis: Forecasting
and control. 霍博肯, 新泽西州: 约翰·威利 & Sons.
Boyan, J. A。, and Moore, A. 瓦. (1995). Generalization in reinforcement learning: Safely approxi-
mating the value function. In Advances in neural information processing systems, PP. 369–376.
剑桥, 嘛: 与新闻界.
Branke, J。, Branke, J。, 德布, K., Miettinen, K., and Slowi ´nski, 右. (2008). Multiobjective optimiza-
的: Interactive and evolutionary approaches, 卷. 5252. 柏林: Springer Science & 商业
媒体.
Caamaño, P。, Salgado, R。, Bellas, F。, and Duro, 右. J. (2016). Introducing synaptic delays in
the NEAT algorithm to improve modelling in cognitive robotics. Neural Processing Letters,
43(2):479–504.
Cardamone, L。, Loiacono, D ., and Lanzi, 磷. L. (2009). On-line neuroevolution applied to the
open racing car simulator. 在 2009 IEEE Congress on Evolutionary Computation, PP. 2622–
2629.
Cardamone, L。, Loiacono, D ., and Lanzi, 磷. L. (2010). Learning to drive in the open racing car
simulator using online neuroevolution. IEEE Transactions on Computational Intelligence and
AI in Games, 2(3):176–190.
Chatzidimitriou, K. C。, and Mitkas, 磷. A. (2013). Adaptive reservoir computing through evolution
和学习. Neurocomputing, 103:198–209.
陈, L。, and Alahakoon, D. (2006). Neuroevolution of augmenting topologies with learning
for data classification. In International Conference on Information and Automation, PP. 367–
371.
Chidambaran, S。, Behjat, A。, and Chowdhury, S. (2018). Multi-criteria evolution of neural net-
work topologies: Balancing experience and performance in autonomous systems. In ASME
2018 International Design Engineering Technical Conferences & Computers and Information in En-
gineering Conference. American Society of Mechanical Engineers Digital Collection.
克鲁恩, J。, 贝克曼, 乙. E., 不自由, C。, and Pennock, 右. 时间. (2009). Evolving coordinated quadruped
gaits with the HyperNEAT generative encoding. 在 2009 IEEE Congress on Evolutionary Com-
putation, PP. 2764–2771.
克鲁恩, J。, 贝克曼, 乙. E., 彭诺克, 右. T。, and Ofria, C. (2009). Hybrid: A hybridization of indirect
and direct encodings for evolutionary computation. In European Conference on Artificial Life,
PP. 134–141.
克鲁恩, J。, 穆雷, J.-B。, and Lipson, H. (2013). 模块化的进化起源. In Proceed-
ings of the Royal Society B: Biological Sciences, 280(1755):20122863.
克鲁恩, J。, 斯坦利, K. 奥。, 彭诺克, 右. T。, and Ofria, C. (2011). On the performance of indirect encod-
ing across the continuum of regularity. IEEE 进化计算汇刊, 15(3):
346.
Costa, 五、, Lourenço, N。, Correia, J。, and Machado, 磷. (2019). Coegan: Evaluating the coevolution
effect in generative adversarial networks. In Proceedings of the Genetic and Evolutionary Com-
putation Conference, PP. 374–382.
库利, A。, 克鲁恩, J。, 塔拉波雷, D ., and Mouret, J.-B. (2015). 可以像动物一样适应的机器人.
自然, 521(7553):503–507.
库利, A。, and Demiris, 是. (2017). Quality and diversity optimization: A unifying modular frame-
工作. IEEE 进化计算汇刊, 22(2):245–259.
D’Ambrosio, D. B., 高奇, J。, and Stanley, K. 氧. (2014). HyperNEAT: The first five years. In Growing
adaptive machines, PP. 159–185. 柏林: 施普林格.
24
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
D’Ambrosio, D. B., 雷曼, J。, 创新, S。, and Stanley, K. 氧. (2011). Task switching in multirobot
learning through indirect encoding. 在 2011 IEEE/RSJ International Conference on Intelligent
Robots and Systems, PP. 2802–2809.
D’Ambrosio, D. B., and Stanley, K. 氧. (2008). Generative encoding for multiagent learning. 在
Proceedings of the 10th Annual Conference on Genetic and Evolutionary Computation, PP. 819–
826.
Darnell, J. E., and Doolittle, 瓦. (1986). Speculations on the early course of evolution. In Proceedings
of the National Academy of Sciences, 83(5):1271–1275.
de Jong, 乙. D. (2004). Towards a bounded Pareto-coevolution archive. In Congress on Evolutionary
计算, 卷. 2, PP. 2341–2348.
德布, K., 普拉塔普, A。, 阿加瓦尔, S。, and Meyarivan, 时间. (2002). A fast and elitist multiobjective genetic
algorithm: NSGA-II. IEEE 进化计算汇刊, 6(2):182–197.
Desell, 时间. (2017A). Developing a volunteer computing project to evolve convolutional neural net-
works and their hyperparameters. In International Conference on e-Science (e-Science), PP. 19–
28.
Desell, 时间. (2017乙). Large scale evolution of convolutional neural networks using volunteer com-
puting. Retrieved from arXiv:1703.05422.
Desell, 时间. (2018). Accelerating the evolution of convolutional neural networks with node-level
mutations and epigenetic weight initialization. In Proceedings of the Genetic and Evolutionary
Computation Conference Companion, PP. 157–158.
Ding, S。, 李, H。, Su, C。, 于, J。, and Jin, F. (2013). Evolutionary artificial neural networks: A review.
Artificial Intelligence Review, PP. 1–10.
Dinh, H. Q., Aubert, N。, Noman, N。, Fujii, T。, Rondelez, Y。, and Iba, H. (2014). An effective method
for evolving reaction networks in synthetic biochemical systems. IEEE Transactions on Evo-
lutionary Computation, 19(3):374–386.
Drchal, J。, and Snorek, 中号. (2012). Distance measures for hyperGP with fitness sharing. In Pro-
ceedings of the 14th Annual Conference on Genetic and Evolutionary Computation, PP. 545–
552.
Drchal, J。, and Šnorek, 中号. (2013). Genetic programming of augmenting topologies for hypercube-
based indirect encoding of artificial neural networks. In Soft computing models in industrial
and environmental applications, PP. 63–72. 柏林: 施普林格.
D’Silva, T。, Janik, R。, Chrien, M。, 斯坦利, K. 奥。, and Miikkulainen, 右. (2005). Retaining learned
behavior during real-time neuroevolution. In AIIDE, PP. 39–44.
ElSaid, A。, 本森, S。, Patwardhan, S。, Stadem, D ., and Desell, 时间. (2019). Evolving recurrent neural
networks for time series data prediction of coal plant parameters. In International Conference
on the Applications of Evolutionary Computation (Part of EvoStar), PP. 488–503.
弗洛雷亚诺, D ., Dürr, P。, and Mattiussi, C. (2008). Neuroevolution: From architectures to learning.
Evolutionary Intelligence, 1(1):47–62.
Gallego-Durán, F. J。, Molina-Carmona, R。, and Llorens-Largo, F. (2013). Experiments on neu-
roevolution and online weight adaptation in complex environments. In Conference of the
Spanish Association for Artificial Intelligence, PP. 131–138.
Games, 乙. (2010). Galactic arms race. Retrieved from http://gar.eecs.ucf.edu
高奇, J。, and Stanley, K. (2007). Generating large-scale neural networks through discovering ge-
ometric regularities. In Proceedings of the 9th Annual Conference on Genetic and Evolutionary
计算, PP. 997–1004.
Evolutionary Computation Volume 29, 数字 1
25
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
Genesereth, M。, Love, N。, and Pell, 乙. (2005). General game playing: Overview of the AAAI com-
请愿. AI Magazine, 26(2): 62.
Gomez, F。, and Miikkulainen, 右. (1997). Incremental evolution of complex general behavior. Adap-
tive Behavior, 5(3–4):317–342.
Gomez, F。, and Miikkulainen, 右. (1998). 2-d pole balancing with recurrent evolutionary networks.
In International Conference on Artificial Neural Networks, PP. 425–430.
Gomez, F。, 施米德胡贝尔, J。, and Miikkulainen, 右. (2008). Accelerated neural evolution through
cooperatively coevolved synapses. Journal of Machine Learning Research, 9(可能):937–
965.
Gomez, F. J。, and Miikkulainen, 右. (1999). Solving non-Markovian control tasks with neuroevo-
溶液. In IJCAI, 卷. 99, PP. 1356–1361.
绿色的, C. (2004). Phased searching with NEAT: Alternating between complexification and sim-
plification. Unpublished manuscript.
Grisci, B., and Dorn, 中号. (2017). NEAT-flex: Predicting the conformational flexibility of amino acids
using neuroevolution of augmenting topologies. Journal of Bioinformatics and Computational
生物学, 1750009.
Haasdijk, E., 红豆杉树, A。, and Karafotias, G. (2010). On-line evolution of robot controllers by an
encapsulated evolution strategy. In Congress on Evolutionary Computation, PP. 1–7.
Hagg, A。, Mensing, M。, and Asteroth, A. (2017). Evolving parsimonious networks by mixing
activation functions. In Proceedings of the Genetic and Evolutionary Computation Conference
(GECCO), PP. 425–432.
Haggett, S. J。, and Chu, D. F. (2009). Evolving novelty detectors for specific applications. Neuro-
计算, 72(10):2392–2405.
汉森, N。, and Ostermeier, A. (2001). Completely derandomized self-adaptation in evolution
策略. 进化计算, 9(2):159–195.
Hardwick-Smith, W., 彭, Y。, 陈, G。, Mei, Y。, and Zhang, 中号. (2017). Evolving transferable ar-
tificial neural networks for gameplay tasks via NEAT with phased searching. In Australasian
Joint Conference on Artificial Intelligence, PP. 39–51.
Hastings, 乙. J。, Guha, 右. K., and Stanley, K. 氧. (2009). Automatic content generation in the galac-
tic arms race video game. IEEE Transactions on Computational Intelligence and AI in Games,
1(4):245–263.
Hemmingway, P。, and Brereton, 氮. (2009). What is a systematic review? Hayward Medical Com-
通讯, 4.
Horn, J。, and Goldberg, D. 乙. (1995). Genetic algorithm difficulty and the modality of fit-
ness landscapes. In Foundations of genetic algorithms, 卷. 3, PP. 243–269. 阿姆斯特丹:
爱思唯尔.
霍恩比, G. S。, 利普森, H。, and Pollack, J. 乙. (2003). Generative representations for the automated
design of modular physical robots. IEEE 机器人与自动化汇刊, 19(4):703–
719.
Hosoya, T。, Baccus, S. A。, and Meister, 中号. (2005). Dynamic predictive coding by the retina. 自然,
436(7047): 71.
惠津加, J。, 克鲁恩, J。, and Mouret, J.-B. (2014). Evolving neural networks that are both
技术. In Proceed-
modular and regular: HyperNEAT plus the connection cost
ings of the 2014 Annual Conference on Genetic and Evolutionary Computation, PP. 697–
704.
26
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
Ihara, K., and Kato, S. (2017). Neuro-evolutionary approach to multi-objective optimization in
one-player mahjong. In International Conference on Network-Based Information Systems, PP.
492–503.
Inden, 乙. (2008). Neuroevolution and complexifying genetic architectures for memory and control
任务. Theory in Biosciences, 127(2):187–194.
Inden, B., Jin, Y。, Haschke, R。, and Ritter, H. (2012). Evolving neural fields for problems with large
input and output spaces. Neural Networks, 28:24–39.
Inden, B., Jin, Y。, Haschke, R。, 里特尔, H。, and Sendhoff, 乙. (2013). An examination of different
fitness and novelty based selection methods for the evolution of neural networks. Soft Com-
puting, 17(5):753–767.
James, D ., and Tucker, 磷. (2004). A comparative analysis of simplification and complexification in
the evolution of neural network topologies. In Proceedings of Genetic and Evolutionary Com-
putation Conference.
Kalyanakrishnan, S。, 刘, Y。, and Stone, 磷. (2006). Half field offense in robocup soccer: A mul-
tiagent reinforcement learning case study. In Robot Soccer World Cup, PP. 72–85. 柏林:
施普林格.
Karakovskiy, S。, and Togelius, J. (2012). The Mario AI benchmark and competitions. IEEE Trans-
actions on Computational Intelligence and AI in Games, 4(1):55–67.
板栗, N。, and Alon, U. (2005). 模块化和网络主题的自发演化. 在
美国国家科学院院刊, 102(39):13773–13778.
Keele, S. (2007). Guidelines for performing systematic literature reviews in software engineering. 科技-
nical Report Version 2.3. EBSE.
Kofod-Petersen, A. (2012). How to do a structured literature review in computer science. Version
0.1.
Kohl, N。, and Miikkulainen, 右. (2009). Evolving neural networks for strategic decision-making
问题. Neural Networks, 22(3):326–337.
Kohl, N。, and Miikkulainen, 右. (2012). An integrated neuroevolutionary approach to reactive
control and high-level strategy. IEEE 进化计算汇刊, 16(4):472–
488.
Kohl, 氮. F. (2009). Learning in fractured problems with constructive neural network algorithms.
博士论文, Department of Computer Sciences, University of Texas at Austin.
Krˇcah, 磷. (2012). Effects of speciation on evolution of neural networks in highly dynamic envi-
罗蒙兹. In International Conference on Learning and Intelligent Optimization, PP. 425–430.
Künzel, S。, and Meyer-Nieberg, S. (2018). Evolving artificial neural networks for multi-objective
任务. In International Conference on the Applications of Evolutionary Computation, PP. 671–
686.
Le Borgne, Y.-A., Santini, S。, and Bontempi, G. (2007). Adaptive model selection for time series
prediction in wireless sensor networks. Signal Processing, 87(12):3010–3020.
乐存, Y。, 波图, L。, 本吉奥, Y。, and Haffner, 磷. (1998). Gradient-based learning applied to doc-
ument recognition. In Proceedings of the IEEE, 86(11):2278–2324.
乐存, Y。, 科尔特斯, C。, and Burges, C. J. (1998). The MNIST database of handwritten digits, 1998.
Retrieved from http://yann.lecun.com/exdb/mnist
雷曼, J。, and Stanley, K. 氧. (2011A). 放弃目标: Evolution through the search for
novelty alone. 进化计算, 19(2):189–223.
Evolutionary Computation Volume 29, 数字 1
27
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
雷曼, J。, and Stanley, K. 氧. (2011乙). Evolving a diversity of virtual creatures through novelty
search and local competition. In Proceedings of the 13th Annual Conference on Genetic and Evo-
lutionary Computation, PP. 211–218.
刘, Y。, and Yao, X. (1996). A population-based learning algorithm which learns both architectures
and weights of neural networks. Chinese Journal of Advanced Software Research, 3:54–65.
Loscalzo, S。, 赖特, R。, Acunto, K., and Yu, L. (2012). Sample aware embedded feature selec-
tion for reinforcement learning. In Proceedings of the 14th Annual Conference on Genetic and
进化计算, PP. 887–894.
Loscalzo, S。, 赖特, R。, and Yu, L. (2015). Predictive feature selection for genetic policy search.
Autonomous Agents and Multi-Agent Systems, 29(5):754–786.
Maley, C. C. (1999). Four steps toward open-ended evolution. In Proceedings of the Genetic and
进化计算会议 (GECCO), 卷. 2, PP. 1336–1343.
Mangasarian, 氧. L。, and Wolberg, 瓦. H. (1990). Cancer diagnosis via linear programming. Technical
报告. University of Wisconsin–Madison Department of Computer Sciences.
Maniezzo, V. (1994). Genetic evolution of the topology and weight distribution of neural net-
作品. IEEE Transactions on Neural Networks, 5(1):39–53.
曼宁, T。, and Walsh, 磷. (2012). Automatic task decomposition for the neuroevolution of aug-
menting topologies (整洁的) algorithm. In European Conference on Evolutionary Computation,
Machine Learning and Data Mining in Bioinformatics, PP. 1–12.
Marzullo, A。, Stamile, C。, Terracina, G。, Calimeri, F。, and Van Huffel, S. (2017). A tensor-based
mutation operator for neuroevolution of augmenting topologies (整洁的). In Congress on Evo-
lutionary Computation, PP. 681–687.
McDonnell, T。, Andoni, S。, Bonab, E., Cheng, S。, Choi, J.-H., Goode, J。, 摩尔, K., Sellers, G。, 和
Schrum, J. (2018). Divide and conquer: Neuroevolution for multiclass classification. In Pro-
ceedings of the Genetic and Evolutionary Computation Conference, PP. 474–481.
Merrild, J。, 拉斯穆森, 中号. A。, and Risi, S. (2018). HyperNTM: Evolving scalable neural turing
machines through HyperNEAT. In International Conference on the Applications of Evolutionary
计算, PP. 750–766.
Methenitis, G。, Hennes, D ., Izzo, D ., and Visser, A. (2015). Novelty search for soft robotic space
勘探. 在诉讼程序中 2015 Annual Conference on Genetic and Evolutionary Compu-
站, PP. 193–200.
Miguel, C. G。, da Silva, C. F。, and Netto, 中号. L. (2008). Structural and parametric evolution of
continuous-time recurrent neural networks. In Tenth Brazilian Symposium on Neural Networks,
PP. 177–182.
米库莱宁, R。, 梁, J。, 迈耶森, E., Rawal, A。, Fink, D ., Francon, 奥。, Raju, B., Shahrzad,
H。, Navruzyan, A。, Duffy, N。, 等人. (2019). Evolving deep neural networks. In Artifi-
cial intelligence in the age of neural networks and brain computing, PP. 293–312. 阿姆斯特丹:
爱思唯尔.
Monroy, G. A。, 斯坦利, K. 奥。, and Miikkulainen, 右. (2006). Coevolution of neural networks using
a layered Pareto archive. In Proceedings of the 8th Annual Conference on Genetic and Evolutionary
计算, PP. 329–336.
Montana, D. J。, and Davis, L. (1989). Training feedforward neural networks using genetic algo-
rithms. In Proceedings of the 11th International Joint Conference on Artificial Intelligence, 卷. 1,
PP. 762–767.
Moriarty, D. 乙. (1997). Symbiotic evolution of neural networks in sequential decision tasks. 博士
论文, University of Texas at Austin.
28
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
Moriarty, D. E., and Miikkulainen, 右. (1995). Discovering complex Othello strategies through
evolutionary neural networks. 连接科学, 7(3-1):195–210.
Moriarty, D. E., and Miikkulainen, 右. (1996). Efficient reinforcement learning through symbiotic
evolution. Machine Learning, 22(1-3):11–32.
Morse, G。, 创新, S。, 斯奈德, C. R。, and Stanley, K. 氧. (2013). Single-unit pattern generators for
quadruped locomotion. In Proceedings of the 15th Annual Conference on Genetic and Evolution-
ary Computation, PP. 719–726.
穆雷, J.-B。, and Clune, J. (2015). 通过映射精英来照亮搜索空间. arXiv:1504.04909.
穆雷, J.-B。, and Doncieux, S. (2012). Encouraging behavioral diversity in evolutionary robotics:
An empirical study. 进化计算, 20(1):91–133.
Nadkarni, J。, and Neves, 右. F. (2018). Combining neuroevolution and principal component
analysis to trade in the financial markets. Expert Systems with Applications, 103:184–
195.
Nelder, J. A。, and Mead, 右. (1965). A simplex method for function minimization. The Computer
杂志, 7(4):308–313.
纽曼, 中号. 乙. (2006). 网络中的模块化和社区结构. 在诉讼程序中
美国国家科学院, 103(23):8577–8582.
Papavasileiou, E., and Jansen, 乙. (2017). The importance of the activation function in neuroevo-
lution with FS-NEAT and FD-NEAT. 在 2017 IEEE Symposium Series on Computational Intelli-
根杰斯, PP. 1–7.
彭, Y。, 陈, G。, 辛格, H。, and Zhang, 中号. (2018). Neat for large-scale reinforcement learning
through evolutionary feature learning and policy gradient search. In Proceedings of the Genetic
和进化计算会议, PP. 490–497.
彭, Y。, 陈, G。, 张, M。, and Mei, 是. (2017). Effective policy gradient search for reinforce-
ment learning through NEAT based feature extraction. In Asia-Pacific Conference on Simulated
Evolution and Learning, PP. 473–485.
Potter, 中号. A。, and Jong, K. A. D. (2000). Cooperative coevolution: An architecture for evolving
coadapted subcomponents. 进化计算, 8(1):1–29.
Prechelt, L. P。, and Informatik, F. F. (1994). A set of neural network benchmark problems and bench-
marking rules. 技术报告. Freie Universität, 柏林.
皮尤, J. K., 索罗斯, L. B., and Stanley, K. 氧. (2016). 品质多元化: A new frontier for evolution-
ary computation. 机器人和人工智能前沿, 3:40.
皮尤, J. K., 索罗斯, L. B., Szerlip, 磷. A。, and Stanley, K. 氧. (2015). Confronting the challenge of qual-
ity diversity. 在诉讼程序中 2015 Annual Conference on Genetic and Evolutionary Compu-
站, PP. 967–974.
皮尤, J. K., and Stanley, K. 氧. (2013). Evolving multimodal controllers with HyperNEAT. 在
Proceedings of the 15th Annual Conference on Genetic and Evolutionary Computation, PP. 735–
742.
Purdie, N。, Lucas, E., and Talley, 中号. (1992). Direct measure of total cholesterol and its distribution
among major serum lipoproteins. Clinical Chemistry, 38(9):1645–1647.
Radcliffe, 氮. J. (1993). Genetic set recombination and its application to neural network topology
optimisation. Neural Computing & 应用领域, 1(1):67–90.
Radding, C. 中号. (1982). Homologous pairing and strand exchange in genetic recombination. 一个-
nual Review of Genetics, 16(1):405–437.
Evolutionary Computation Volume 29, 数字 1
29
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
Rainey, K., and Stastny, J. (2011). Object recognition in ocean imagery using feature selection and
compressive sensing. 在 2011 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), PP.
1–6.
Rawal, A。, and Miikkulainen, 右. (2016). Evolving deep LSTM-based memory networks using an
information maximization objective. In Proceedings of the Genetic and Evolutionary Computa-
tion Conference, PP. 501–508.
Reeder, J。, Miguez, R。, Sparks, J。, Georgiopoulos, M。, and Anagnostopoulos, G. (2008). Interac-
tively evolved modular neural networks for game agent control. 在 2008 IEEE Symposium on
Computational Intelligence and Games, PP. 167–174.
Reisinger, J。, Bahceci, E., Karpov, 我。, and Miikkulainen, 右. (2007). Coevolving strategies for gen-
eral game playing. 在 2007 IEEE Symposium on Computational Intelligence and Games, PP. 320–
327.
Reisinger, J。, 斯坦利, K. 奥。, and Miikkulainen, 右. (2004). Evolving reusable neural modules. 在
Genetic and Evolutionary Computation Conference, PP. 69–81.
创新, S。, and Stanley, K. 氧. (2010). Indirectly encoding neural plasticity as a pattern of local rules.
In International Conference on Simulation of Adaptive Behavior, PP. 533–543.
创新, S。, and Stanley, K. 氧. (2012A). An enhanced hypercube-based encoding for evolving the place-
蒙特, density, and connectivity of neurons. 人工生命, 18(4):331–363.
创新, S。, and Stanley, K. 氧. (2012乙). A unified approach to evolving plasticity and neural geometry.
在 2012 国际神经网络联合会议, PP. 1–8.
创新, S。, and Stanley, K. 氧. (2014). Guided self-organization in indirectly encoded and evolving
topographic maps. 在诉讼程序中 2014 Annual Conference on Genetic and Evolutionary
计算, PP. 713–720.
创新, S。, and Togelius, J. (2015). Neuroevolution in games: State of the art and open chal-
伦格斯. IEEE Transactions on Computational Intelligence and AI in Games. Retrieved from
arXiv:1410.7326.
Rosin, C. D ., and Belew, 右. K. (1997). Coevolutionary search among adversaries. 博士论文, Cite-
seer.
Sboev, A。, Serenko, A。, Rybka, R。, Vlasov, D ., and Filchenkov, A. (2018). Estimation of the influ-
ence of spiking neural network parameters on classification accuracy using a genetic algo-
rithm. Procedia Computer Science, 145:488–494.
施密特, M。, and Lipson, H. (2011). Age-fitness Pareto optimization. In Genetic programming theory
and practice VIII, PP. 129–146. 柏林: 施普林格.
Schrum, J. (2018). Evolving indirectly encoded convolutional neural networks to play tetris with
low-level features. In Proceedings of the Genetic and Evolutionary Computation Conference, PP.
205–212.
Schrum, J。, 雷曼, J。, and Risi, S. (2016). Using indirect encoding of multiple brains to produce
multimodal behavior. Retrieved from arXiv:1604.07806.
Schrum, J。, and Miikkulainen, 右. (2016). Solving multiple isolated, interleaved, and blended tasks
through modular neuroevolution. 进化计算, 24(3):459–490.
Sigal, N。, and Alberts, 乙. (1972). Genetic recombination: The nature of a crossed strand-exchange
between two homologous dna molecules. Journal of Molecular Biology, 71(3):789–793.
席尔瓦, F。, Correia, L。, and Christensen, A. L. (2016). Leveraging online racing and population
cloning in evolutionary multirobot systems. In European Conference on the Applications of Evo-
lutionary Computation, PP. 165–180.
30
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
席尔瓦, F。, Urbano, P。, Correia, L。, and Christensen, A. L. (2015). odNEAT: An algorithm for
decentralised online evolution of robotic controllers. 进化计算, 23(3):421–
449.
席尔瓦, 奥。, Sigel, P。, and Escobar, 中号. J. (2017). Time delays in a HyperNEAT network to improve
gait learning for legged robots. 在 2017 国际神经网络联合会议, PP.
4222–4228.
辛格, S. P。, and Sutton, 右. S. (1996). Reinforcement learning with replacing eligibility traces. Ma-
chine Learning, 22(1–3):123–158.
史密斯, 右. (2001). Open dynamics engine (ODE) physics simulator. Retrieved from http://万维网.
ode.org
Sohn, H。, Worder, K., and Farrar, C. 右. (2001). Novelty detection under changing environmental con-
版本. 技术报告, Los Alamos National Lab, NM.
Standish, 右. K. (2003). Open-ended artificial evolution. International Journal of Computational Intel-
ligence and Applications, 3(02):167–175.
斯坦利, K. 氧. (2006). Exploiting regularity without development. In Proceedings of the AAAI Fall
Symposium on Developmental Systems, p. 37.
斯坦利, K. 氧. (2007). 构成模式生成网络: A novel abstraction of devel-
选项. 遗传编程和进化机器, 8(2):131–162.
斯坦利, K. 氧. (2018). 人工科学中的艺术. 列奥纳多, 51(2):165–172.
斯坦利, K. 奥。, Bryant, 乙. D ., and Miikkulainen, 右. (2005). Real-time neuroevolution in the NERO
video game. IEEE 进化计算汇刊, 9(6):653–668.
斯坦利, K. 奥。, 克鲁恩, J。, 雷曼, J。, and Miikkulainen, 右. (2019). Designing neural networks
through neuroevolution. Nature Machine Intelligence, 1(1):24–35.
斯坦利, K. 奥。, D’Ambrosio, D. B., and Gauci, J. (2009). 基于超立方体的进化编码
大规模神经网络. 人工生命, 15(2):185–212.
斯坦利, K. 奥。, Karpov, 我。, 米库莱宁, R。, and Gold, A. (2006). The NERO video game. In AIIDE,
PP. 151–152.
斯坦利, K. 奥。, 雷曼, J。, and Soros, L. (2016). The open racing car simulator. Retrieved from
http://torcs.sourceforge.net
斯坦利, K. 奥。, 雷曼, J。, and Soros, L. (2017). Open-endedness: The last grand challenge
you’ve never heard of. Retrieved from https://www.oreilly.com/radar/open-endedness-
the-last-grand-challenge-youve-never-heard-of/
斯坦利, K. 奥。, and Miikkulainen, 右. (2002A). The dominance tournament method of monitor-
ing progress in coevolution. In Proceedings of Genetic and Evolutionary Computation Conference
(GECCO), PP. 242–248.
斯坦利, K. 奥。, and Miikkulainen, 右. (2002乙). Evolving neural networks through augmenting
topologies. 进化计算, 10(2):99–127.
斯坦利, K. 奥。, and Miikkulainen, 右. (2004). Competitive coevolution through evolutionary com-
plexification. Journal of Artificial Intelligence Research, 21:63–100.
斯坦因, G。, and Gonzalez, A. J. (2010). Building high-performing human-like tactical agents through
observation and experience. IEEE Transactions on Systems, 男人, and Cybernetics, Part B (Cy-
bernetics), 41(3):792–804.
斯坦因, G。, 冈萨雷斯, A. J。, and Barham, C. (2015). Combining NEAT and PSO for learning tactical
human behavior. Neural Computing and Applications, 26(4):747–764.
Evolutionary Computation Volume 29, 数字 1
31
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
Stone, P。, Kuhlmann, G。, 泰勒, 中号. E., 和刘, 是. (2005). Keepaway soccer: From machine learn-
ing testbed to benchmark. In Robot Soccer World Cup, PP. 93–105. 柏林: 施普林格.
Sutton, 右. S。, and Barto, A. G. (1998). Reinforcement learning: An introduction, 卷. 1. 剑桥,
嘛: 与新闻界.
Tan, M。, Deklerck, R。, Cornelis, J。, and Jansen, 乙. (2013). Phased searching with NEAT in a time-
scaled framework: Experiments on a computer-aided detection system for lung nodules.
Artificial Intelligence in Medicine, 59(3):157–167.
Tan, M。, Hartley, M。, Bister, M。, and Deklerck, 右. (2009). Automated feature selection in neuroevo-
溶液. Evolutionary Intelligence, 1(4):271–292.
Tan, M。, Pu, J。, and Zheng, 乙. (2014). Optimization of network topology in computer-aided detec-
tion schemes using phased searching with NEAT in a time-scaled framework. Cancer Infor-
数学, 13:CIN–S13885.
塔拉波雷, D ., 克鲁恩, J。, 库利, A。, and Mouret, J.-B. (2016). How do different encodings influence
the performance of the map-elites algorithm? In Proceedings of the Genetic and Evolutionary
计算会议, PP. 173–180.
泰勒, 中号. E., Whiteson, S。, and Stone, 磷. (2006). Comparing evolutionary and temporal difference
methods in a reinforcement learning domain. In Proceedings of the 8th Annual Conference on
Genetic and Evolutionary Computation, PP. 1321–1328.
Téllez, 右. A。, Angulo, C。, and Pardo, D. 乙. (2006). Evolving the walking behaviour of a 12 dof
quadruped using a distributed neural architecture. In International Workshop on Biologically
Inspired Approaches to Advanced Information Technology, PP. 5–19. 柏林: 施普林格.
Thierens, D. (2005). An adaptive pursuit strategy for allocating operator probabilities. In Pro-
ceedings of the 7th Annual Conference on Genetic and Evolutionary Computation, PP. 1539–
1546.
Thoning, K. W., Tans, 磷. P。, and Komhyr, 瓦. D. (1989). Atmospheric carbon dioxide at Mauna
Loa Observatory: 2. Analysis of the NOAA GMCC data, 1974–1985. Journal of Geophysical
研究: Atmospheres, 94(D6):8549–8565.
Thrun, S. B., Bala, J。, Bloedorn, E., Bratko, 我。, Cestnik, B., Cheng, J。, 德容, K., Dzeroski, S。,
Fahlman, S. E., Fisher, D ., 等人. (1991). The monk’s problems—A performance comparison of dif-
ferent learning algorithms. 技术报告, CMU-CS-91-197. Computer Science Department,
卡内基梅隆大学.
Timin, 中号. 乙. (1995). The robot auto racing simulator. Retrieved from http://rars.sourceforge.net
Trujillo, L。, Muñoz, L。, Galván-López, E., and Silva, S. (2016). NEAT genetic programming: 骗局-
trolling bloat naturally. 信息科学, 333:21–43.
Verbancsics, P。, and Harguess, J. (2015). Image classification using generative neuro evolution
for deep learning. In IEEE Winter Conference on Applications of Computer Vision, PP. 488–
493.
Verbancsics, P。, and Stanley, K. 氧. (2011). Constraining connectivity to encourage modularity in
HyperNEAT. In Proceedings of the 13th Annual Conference on Genetic and Evolutionary Compu-
站, PP. 1483–1490.
Walsh, 瓦. E., Tesauro, G。, Kephart, J. 奥。, and Das, 右. (2004). Utility functions in autonomic sys-
特姆斯. In Proceedings of the International Conference on Autonomic Computing, PP. 70–77.
王, G。, Cheng, G。, and Carr, 时间. 右. (2013). The application of improved neuroevolution of aug-
menting topologies neural network in Marcellus Shale lithofacies prediction. 电脑 &
Geosciences, 54:50–65.
32
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
王, R。, 雷曼, J。, 克鲁恩, J。, and Stanley, K. 氧. (2019). Poet: Open-ended coevolution of envi-
ronments and their optimized solutions. In Proceedings of the Genetic and Evolutionary Com-
putation Conference, PP. 142–151.
沃森, J. D. (2004). Molecular biology of the gene. 新德里: Pearson Education India.
Wen, J。, 李, S。, 林, Z。, 胡, Y。, and Huang, C. (2012). Systematic literature review of machine learn-
ing based software development effort estimation models. Information and Software Technol-
奥吉, 54(1):41–59.
Whiteson, S。, and Stone, 磷. (2006A). Evolutionary function approximation for reinforcement learn-
英. Journal of Machine Learning Research, 7(可能):877–917.
Whiteson, S。, and Stone, 磷. (2006乙). On-line evolutionary computation for reinforcement learning
in stochastic domains. In Proceedings of the 8th Annual Conference on Genetic and Evolutionary
计算, PP. 1577–1584.
Whiteson, S。, Stone, P。, 斯坦利, K. 奥。, 米库莱宁, R。, and Kohl, 氮. (2005). Automatic feature
selection in neuroevolution. In Proceedings of the 7th Annual Conference on Genetic and Evolu-
tionary Computation, PP. 1225–1232.
Whitley, D ., Starkweather, T。, and Bogart, C. (1990). Genetic algorithms and neural networks:
Optimizing connections and connectivity. Parallel Computing, 14(3):347–361.
冬天, D. (2005). Magnavox Odyssey: First home video game console. Retrieved from http://
www.pong-story.com/odyssey.htm
赖特, R。, and Gemelli, 氮. (2009). Adaptive state space abstraction using neuroevolution. 在
International Conference on Agents and Artificial Intelligence, PP. 84–96.
赖特, R。, Loscalzo, S。, and Yu, L. (2012). Embedded incremental feature selection for reinforcement
学习. 技术报告. Air Force Research Lab, 罗马, 纽约.
徐, L。, 严, P。, and Chang, 时间. (1988). Best first strategy for feature selection. In Ninth International
Conference on Pattern Recognition, PP. 706–708.
Yao, X. (1993). Evolutionary artificial neural networks. International Journal of Neural Systems,
4(03):203–222.
Yao, X. (1999). Evolving artificial neural networks. In Proceedings of the IEEE, 87(9):1423–1447.
Yao, X。, 和刘, 是. (1998). Towards designing artificial neural networks by evolution. Applied
Mathematics and Computation, 91(1):83–90.
赵, Y。, Cai, H。, 陈, Q., and Hu, 瓦. (2007). Kernel-based online NEAT for keepaway soccer.
In International Conference on Life System Modeling and Simulation, PP. 100–107.
Appendix A Detailed Answers to the Research Questions
A.1 Coevolutionary NEAT ∗4 (2004)
Principles. Coevolutionary NEAT (Stanley and Miikkulainen, 2004) is applicable to
open-ended problems where the final solution is not known and more sophisticated
4The “*” symbol will be used next to a method’s title if the paper did not provide an acronym for the
proposed method. In these cases the abbreviations with this symbol are names provided by us.
Evolutionary Computation Volume 29, 数字 1
33
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
strategies can be continuously generated using coevolution. A coevolutionary algo-
rithm is an EA in which an individual’s fitness cannot be evaluated based on an objective
措施, but instead based on interactions with the other individuals of the population.
It modifies the NEAT algorithm to evolve two separate populations that are evaluated
互相对抗. Each population is evaluated against a sample of the opponent popu-
lation consisting of the champions of the best four species and eight champion solutions
of the past generations that are archived into a so-called “Hall of Fame.” In this way, 它
is guaranteed that the opponent sample consists of good and diverse solutions and that
the current solutions are competitive against older solutions. NEAT’s complexification
ability is leveraged to allow continual coevolution, 那是, finding new solutions while
maintaining existing capabilities, by elaborating on existing strategies. To achieve a se-
quence of increasingly more sophisticated strategies, a dominance tournament method
is defined (Stanley and Miikkulainen, 2002A) so that champion strategies in every gen-
eration are evaluated against previous dominant strategies.
Encoding. NEAT’s encoding is used.
评估. The evolved strategies are evaluated on their complexity, 那是, the num-
ber of nodes and connections that exist in the dominant network averaged over the
different runs. A dominance tournament method (Stanley and Miikkulainen, 2002A) 是
defined to evaluate the progress of evolving more sophisticated strategies. The winner
strategy of a generation is considered dominant if it defeats all the previous dominant
策略. Coevolutionary NEAT is evaluated against fixed topology coevolution and
simplifying coevolutionary NEAT, by direct applications in a simulated robot duel. A
simplifying coevolutionary algorithm works in a way opposite a complexifying one,
那是, the evolution starts with a complex network and structure is gradually removed.
The algorithms are compared using the highest achieved dominance level and the gen-
eration when dominance occurred. 而且, the champion strategy of the simplify-
ing and fixed-topology coevolutionary algorithms is evaluated relative to the perfor-
mance of coevolutionary NEAT by comparisons against its entire dominance ranking.
This metric is calculated by taking the dominance level of the highest strategy of co-
evolutionary NEAT that is defeated by a strategy from the champion of the other co-
evolutionary algorithm and dividing by the total number of dominance levels. 最后,
the equivalent generation in which the latter happens is also considered a metric. 这是
concluded that coevolutionary NEAT with complexification finds more sophisticated
strategies than fixed topology coevolution and simplifying coevolutionary NEAT.
A.2 Modular NEAT (2004)
Principles. Modular NEAT (Reisinger et al., 2004) is a TWEANN coevolutionary algo-
rithm that enables the simultaneous evolution and modularization of network topolo-
吉斯. It breaks the problem into subproblems by evolving neural substructures (从
one neuron to whole networks) that can be reused and combined together into more
complex structures. The algorithm is suitable for high-dimensional search spaces.
Modular NEAT consists of two types of populations: a population of modules (整洁的
网络) and a population of blueprints. Each module is a set of links connecting ab-
stract input, 输出, and hidden nodes. The set of blueprints defines how the mod-
ules can be combined. Each blueprint consists of a fixed-size list of pairs of modules
and mappings from the abstract nodes to the nodes of the solution, a process called
binding. Both populations are evolved together symbiotically, such as in the SANE
34
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
方法 (Moriarty, 1997). Symbiotic evolution is defined in Moriarty (1997) as “a type
of coevolution where individuals explicitly cooperate with each other and rely on the
presence of other individuals for survival.” The populations of modules and blueprints
can evolve in different time scales and in two sequential phases, each of which include
procedures of selection, crossover, mutation, and fitness evaluation.
Encoding. The module population is encoded as in NEAT, while historical markings
are also assigned on the blueprint population.
评估. Modular NEAT is tested in an artificial board game with two functionally
different regions and varying input/output dimensionality. Its ability to produce mod-
ular networks is measured by the percentage of crosslinks that connect an input from
the one half of the board game to the output of its other half. Modular NEAT is com-
pared to NEAT and it can obtain better networks with higher average accuracy achieved
in less generations and with less crosslinks.
A.3 FS-NEAT (2005)
Principles. Feature Selective NEAT (FS-NEAT) (Whiteson et al., 2005) extends NEAT
by performing feature selection in addition to the learning of the network’s topology
and weights. In FS-NEAT, evolution starts even more minimally than in NEAT, 和
networks with one random input connected to one random output. As evolution pro-
gresses, new inputs, connections and hidden nodes can be added as in NEAT. FS-NEAT
performs implicit feature selection by maintaining those connections that initiate from
the inputs which enhance the network’s performance, 那是, the relevant inputs.
Encoding. NEAT’s encoding is used.
评估. FS-NEAT is evaluated on a RL task of racing robot cars and it is compared
to NEAT in terms of fitness performance, number of generations, and size of the evolved
网络. It is found that FS-NEAT can learn better networks than NEAT in less gener-
ations especially when redundant or irrelevant inputs are present in the input dataset.
A.4 rtNEAT (2005)
Principles. Real-Time NEAT (rtNEAT) (Stanley et al., 2005) allows evolving video
games’ agents in real time. Each agent is represented by a NEAT-evolved ANN. 在这个
way the agents can develop increasingly complex behavior which can be changed and
be improved throughout the game, guided by the player itself. The main difference
with NEAT lies in the reproduction cycle; in NEAT the whole population is replaced by
a new population at each generation. 但, if this would happen in a real-time environ-
蒙特, such as in a video game, all the agents would instantly change their behavior. 在
order to avoid this, rtNEAT replaces only one of the worst individuals of the popula-
tion with the offspring of two of the best parents. This replacement occurs continuously
and becomes unnoticeable by the player. To achieve speciation in real time, NEAT’s re-
production cycle is changed and a new agent is introduced into the population every
n ticks of the clock, to remove the agent with the worst adjusted fitness, given he has
been alive for a minimum time.
Encoding. NEAT’s encoding is used.
Evolutionary Computation Volume 29, 数字 1
35
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
评估. rtNEAT’s abilities are illustrated on a military combat game called NERO
in which the user can train robots to develop skills suitable for battle. 所以, its per-
formance is subject to the user’s perception of when the trainable agents have reached
the desired skills.
A.5 rtNEATv2∗ (2005)
Principles. rtNEATv2 (D’Silva et al., 2005) extends rtNEAT (Stanley et al., 2005) to train
agents that should show different behaviors and perform multiple tasks. Milestoning
refers to keeping a pool of old individuals, drawn from the population of agents at a
specific time, that know how to perform a given task. With a specific probability and
tournament selection, an individual, which at the point of the pool’s creation had high
fitness, is selected from the pool. Another individual is selected from the current pop-
ulation and the two are mated in order to produce a hybrid offspring. The generated
offspring has the ability to perform both tasks, as it contains genes that come from both
its ancestor and its modern parent.
Encoding. NEAT’s encoding is used.
评估. rtNEATv2 with different parameter settings regarding the size of the pool
and the probability of creating a hybrid offspring are evaluated on the NERO task and
compared against rtNEAT (Stanley et al., 2005) (Section A.4). The agents are trained
on two tasks in two subsequent phases and they are tested on a third phase to evaluate
whether they remember the first task or not. To evaluate their performance, the distance
remaining from the target, as well as on the portion of agents from the population that
solved each of the two tasks successfully are used.
A.6 CPPN-NEAT (2006)
Principles. CPPN-NEAT (斯坦利, 2006) is a method using NEAT to evolve Composi-
tional Pattern Producing Networks (CPPN). CPPNs are proposed as a new abstraction
of encoding natural development by simulating it through compositions of functions
based on observed gradient patterns in natural embryos. CPPNs are connected graphs
of functions, therefore they resemble ANNs with nodes of different activation functions
(Gaussian, sigmoid, and periodic). Because CPPNs look like ANNs, NEAT can be used
to complexify them by evolution. In CPPN-NEAT, evolution is interactive, 那是, dur-
ing the selection step the parent population is selected by the user. In contrast to NEAT,
the population of CPPNs is initialized with one hidden layer of one or two hidden nodes
and speciation’s similarity metric is changed to take into account the different activation
功能.
Encoding. CPPN-NEAT modifies NEAT’s encoding by adding a field in the node genes
to specify the nodes’ activation functions.
评估. CPPN-NEAT’s performance is not evaluated based on a metric, but based
on visual interpretation of the evolved patterns.
A.7 NEAT+Q / Online NEAT+Q (2006)
Principles. NEAT+Q (Whiteson and Stone, 2006A) is an evolutionary function approxi-
mation algorithm, 那是, a hybrid method using NEAT to configure the ideal ANN that
can learn to represent the value estimates provided by Q-learning, a Time Difference
36
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
(TD) 方法. During NEAT’s fitness evaluation, which is repeated for e episodes, 这
ANNs’ weights are updated by backpropagation, with each episode starting with the
weights of the last episode. Two approaches that enable the synergy between evolution
and learning are applied: Lamarckian and Darwinian. With the former, any changes
made during a generation are written back to the genome and inherited by the off-
springs, while with the latter these changes are discarded.
NEAT+Q is further extended to online NEAT+Q for online scenarios where an agent
aims at learning a good policy quickly while maximizing its reward (exploration and
开发). For this purpose, two action selection mechanisms that can balance these
two objectives are used: (西德:4)-greedy and softmax. These selection mechanisms are applied
at the level of policies evaluation, aiming at maximizing the reward of the best policy
and increasing the average reward, 分别.
Encoding. NEAT’s encoding is employed.
评估. The performance of NEAT+Q and online NEAT+Q is evaluated using
the uniform moving average score per episode averaged over the different algorith-
mic runs. It was found that NEAT+Q outperforms TD methods, while online NEAT+Q
improves EC’s online performance.
A.8 LAPCA-NEAT (2006)
Principles. Layered Pareto Coevolution Archive NEAT (LAPCA-NEAT) (Monroy
等人。, 2006) is a Pareto coevolutionary algorithm that uses NEAT to evolve a popula-
tion of individuals that competes against itself. Pareto coevolution is treated as a mul-
tiobjective optimization problem whose candidate solutions are known as learners and
the individuals on which they are tested as testers or evaluators. In Pareto coevolu-
的, the learners are compared in terms of Pareto dominance to a set of testers that are
viewed as the objectives being optimized. LAPCA-NEAT’s coevolutionary memory is
a LAPCA (de Jong, 2004) that consists of nondominated learners organized in layers
from past generations drawn from the species’ champions set and testers that are able
to discriminate between layers. This enables users to keep the number of evaluations
that are required to establish a Pareto dominance low.
Encoding. NEAT’s encoding is used.
评估. LAPCA-NEAT is tested against other types of memories, 例如, A
Hall of Fame (HOF) as coevolutionary memory on the pong game. Two sets of com-
parisons are performed: the best of run and the best of generation to evaluate which
coevolutionary memory evolves better players and which one results in better coevolu-
tionary progress, 分别. The performance of a player is determined by the number
of players it dominates, whereas the coevolutionary progress is evaluated based on the
average number of wins, ties and losses. 最后, the two memories are compared based
on the size of the archive they maintain. It is found that LAPCA uses less memory but
it does not outperform a Hall of Fame memory in terms of the players’ performance.
A.9 L-NEAT (2007)
Principles. Learning-NEAT (L-NEAT) (Chen and Alahakoon, 2006) is a hybrid learn-
ing algorithm applied to classification problems. It combines NEAT with backprop-
agation to benefit from global and local search, 分别. L-NEAT (Chen and
Evolutionary Computation Volume 29, 数字 1
37
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
Alahakoon, 2006) employs a divide-and-conquer approach to divide each network
of the population into fully connected subnetworks with only one output node cor-
responding to different subtasks. The final solution is generated by assembling the
networks that perform best in each subtask. 通过这种方法, the computational ex-
pensive problem of each individual’s fitness evaluation is addressed. 而且, NEAT’s
purpose is changed from searching the optimal solution to searching for networks that
will correspond well to backpropagation, called feasible points. 在这种情况下, backprop-
agation takes place every few generations only on the NEAT-evolved networks with
high fitness values.
Encoding. Since NEAT is employed during the global search, the same encoding as in
NEAT is used.
评估. The classification accuracy averaged over twenty runs is engaged for the
evaluation of L-NEAT’s (Chen and Alahakoon, 2006) 表现. L-NEAT outper-
forms both NEAT and NEAT enhanced with a divide-and-conquer method.
A.10 Nnrg.hazel (2007)
Principles. Nnrg.hazel (Reisinger et al., 2007) is a coevolutionary algorithm based on
NEAT for evolving strategies for General Game Playing (GGP). In GGP, agents can play
a variety of unknown games described in first order logic. With coevolution the space of
policies and multiple opponent strategies can be searched with little a priori knowledge.
In nnrg.hazel, the ANNs that are evolved by NEAT are used as heuristic evaluators in
a minimax partial game tree search. As in Stanley and Miikkulainen (2004), two pop-
ulations of strategies are evolved and the fitness of an individual is evaluated against
a group of opponents. To ensure that more sophisticated strategies will be discovered
and avoid recycling behavior, the Covering Competitive Algorithm (CCA) (Rosin and
Belew, 1997) is employed. 这种技术, similar to the dominance tournament algo-
rithm in Stanley and Miikkulainen (2004), guarantees that monotonic progress toward
some Pareto optimal solution will be made. During evolution, the individuals of the
two populations are competing against a random set of opponents of the current gen-
eration but also against previous strategies. This is achieved through maintaining a set
of previous dominating strategies called teachers. In each generation, each individual
of a dominated population, 那是, a population whose strategies are beaten by the op-
ponent’s teachers, is evaluated against the teachers of the other population in order to
determine which population will dominate which.
Encoding. NEAT’s encoding is used.
评估. Nnrg.hazel is tested on a set of games from the GGP using only 1-ply
search and it is compared against random search (also 1-ply). The performance metrics
used include the average size of the teachers’ set (representing the best fitness achieved)
and the average match score plotted against the teacher’s rank. To evaluate scalability
of the 1-ply evolved heuristics to a deeper n-ply search, the evolved heuristics are used
as n-ply evaluators (n ∈ [1, 4]) and their performance is measured by the average game
分数. 最后, the average amount of generations that each teacher with a specific role is
not dominated is computed, to give an estimation of disengagement, 那是, “when one
population outperforms the other to the point that there is no longer a clear gradient
that selection can flow” (Reisinger et al., 2007). It is found that nnrg.hazel outperforms
38
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
random search but cannot scale in deeper search depths and it shows some degree of
脱离接触.
A.11 KO-NEAT (2007)
Principles. Kernel-based Online NEAT (KO-NEAT) (赵等人。, 2007) is a hybrid NE
algorithm for improving NEAT’s online performance. It borrows an action selection
mechanism from TD algorithms called Interval Estimation (Taylor et al., 2006) 采取
advantage of the fitness information gained in earlier generations so that more promis-
ing individuals will be assigned more episode evaluations. 而且, KO-NEAT em-
ploys μ + λ evolutionary strategy to create the next generation’s population from the
combined μ parents and λ children based on their fitness. 最后, the offsprings’ initial
fitness is calculated using kernel function approximation.
Encoding. NEAT’s encoding is used.
评估. KO-NEAT (赵等人。, 2007) is compared to NEAT on the keepaway soc-
cer game (Stone et al., 2005) using the maximum fitness acquired by the best individ-
ual as performance metric. KO-NEAT was able to plateau sooner, accumulate more
rewards during the same episodic evaluations and learn a better policy than NEAT. 在
结论, KO-NEAT improves NEAT’s online performance and accelerates learning
efficiency and speed.
A.12 NEAT-CTRNN (2008)
Principles. NEAT-CTRNN (Miguel et al., 2008) uses NEAT to evolve Continuous Time
Recurrent Neural Networks (CTRNN). CTRNNs are a type of ANN with recurrent con-
nections and nodes equipped with an internal time constant τ and whose response in
the incoming neuron spike is based on differential equations. These types of nodes be-
long to a class of dynamic neuron models which are considered to be more realistic
models of biological neurons.
Encoding. NEAT’s encoding is used.
评估. The algorithm is evaluated based on its generalization ability and the
number of fitness evaluations. At the end of each generation, the best network is tested
on a separate test with different initial conditions. The generalization score is defined
as the fraction of times the network was able to solve the task. It is found that NEAT-
CTRNN evolves smaller networks and requires fewer evaluations compared with other
NE methods that evolve traditional ANNs.
A.13 HyperNEAT (2008)
Principles. HyperNEAT (Stanley et al., 2009) extends CPPN-NEAT (Section A.6) 为了
designing large-scale ANNs of fixed topologies. It evolves the connectivity of ANNs by
exploiting information of the geometry of the application domain. This can be achieved
by defining the ANNs as substrates with input and output nodes placed in a way that
is representative of their original positions. 这样, substrates with various topolo-
gies suitable for solving different problems can be defined, such as a (2D/3D) grid, A
sandwich or a circular substrate.
Evolutionary Computation Volume 29, 数字 1
39
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
Encoding. HyperNEAT uses developmental (间接) encoding to map the regulari-
ties of the task’s geometry onto the ANN’s topology. Developmental encoding allows
the reuse of the same genes for developing multiple structures. It is inspired by the bi-
ological encoding between the genome and the phenotype. NEAT is used to evolve the
topology, 重量, and activation functions of CPPNs which output a spatial pattern
in the hyperspace. This pattern corresponds to a connectivity pattern in the substrate,
那是, the CPPNs output the weight of the connection of the queried points of the
substrate.
评估. HyperNEAT’s performance is compared to a modification of NEAT called
Perceptron NEAT (PNEAT) (IE。, NEAT for evolving perceptrons) on a task of object
recognition in a 2D space. As a metric, the average distance between the champion’s
output and the real position of the target at each generation, across all trials and runs is
用过的. It is found that HyperNEAT is able to find better solutions and has better gener-
alization ability than PNEAT. 而且, HyperNEAT, in contrast to PNEAT, is able to
scale to higher resolutions without the need of further evolution.
A.14 TL-CPPN-NEAT∗2 (2008)
Principles. Transfer Learning CPPN-NEAT (TL-CPPN-NEAT) (Bahçeci and Miikku-
lainen, 2008) is a hybrid method that proposes evolving patterns as game heuristics for
GGP tasks and transferring the learned patterns on other tasks. With transfer learning,
the heuristics learned on a source task can be transferred to a similar, slightly more diffi-
cult target task. In TL-CPPN-NEAT, patterns are evolved by CPPN-NEAT (Section A.6)
and transfer learning is achieved by using the final population evolved on a source task
to initialize the population to be evolved on a target task. In contrast to CPPN-NEAT, 这
CPPN nodes include only sigmoid and Gaussian activation functions and a new muta-
tion operator is introduced to change the activation function from Gaussian to sigmoid
(or from sigmoid to Gaussian) without changing the innovation number of the node.
This allows improving individuals that are near the optimal solution, but one of their
nodes has the wrong activation function.
Encoding. The method is an extension of CPPN-NEAT, therefore it uses NEAT to
evolve CPPNs and NEAT’s direct encoding to encode the genome.
评估. The method is tested on a single-player board game with one version serv-
ing as the source task and a more complex version as the target task. TL-CPPN-NEAT
is evaluated against CPPN-NEAT (Section A.6) without transfer learning. The metrics
used include the player’s performance on the game, given by the ratio of successful
checks and the total learning time, given by the number of generations. It is found that
transfer learning is beneficial, improving the performance and the learning time.
A.15 Multiagent HyperNEAT (2008)
Principles. Multiagent HyperNEAT (D’Ambrosio and Stanley, 2008) extends Hyper-
NEAT for applications in multiagent domains, where the agents specialize in specific
tasks and therefore are characterized by separate policies. 然而, policies can also
share common characteristics and be complementary. Multiagent HyperNEAT enables
the automatic discovery of policies, as a pattern with common characteristics and vari-
ations. With multiagent HyperNEAT, there is no need to separately define each agent’s
policy nor rediscover the common features. This pattern of policies is produced as
40
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
a function of the agents’ position in the field through a single genome described in
the following paragraph. Multiagent HyperNEAT is further modified by seeding the
evolution with prior knowledge in the form of adding a good genome in the initial
人口.
Encoding. Multiagent HyperNEAT uses a modified version of CPPNs as indirect en-
编码, where two substrates need to be defined; the first one is an ANN substrate
describing the geometry of the sensors of each agent while the second one describes
the position of the agents in the field. 这样, the second substrate consists of a set
of substrates whose connection weights are calculated as a function of their location
within each network and within the larger substrate. Using a single genome, a hetero-
geneous team of agents, each represented by the same ANN substrate, can be evolved.
As in HyperNEAT, a population of CPPNs is evolved that takes as inputs the positions
希, yi of each i agent. 然而, the CPPNs initial topologies are altered to include a
hidden node r (X) after the input node of the xi coordinate. With this modification, 这
x coordinate frame is repeated for each agent in order to mark positions of each agent.
到底, a single CPPN can encode the outputs of the agents as patterns that share
characteristics but also show variation.
评估. Multiagent HyperNEAT with and without seeding that evolves heteroge-
neous groups of agents is evaluated against multiagent HyperNEAT that evolves homo-
geneous groups of agents (i.e. against HyperNEAT), with and without seeding. 这些
algorithms are evaluated on a predator–prey task with a varying number of preys and
a variety of topological prey formations repeated several times. The time remaining
after the agents have captured all the preys is used as a performance metric, finding
multiagent HyperNEAT with seeding to perform the best among the tested algorithms.
A.16 cgNEAT (2009)
Principles. Content-generating NEAT (cgNEAT) (Hastings et al., 2009) is an interac-
tive EC method that uses a modified version of NEAT to evolve CPPNs for automatic
content generation in video games, as they are played, based on each player’s behavior.
cgNEAT is based on NEAT but it differs in some points. 首先, 人口
size is not a developer-defined parameter but it depends on the number of players in
the game. 而且, the selection of the “bad” behaving networks is done implicitly by
the players’ actions and when an offspring is created it is not placed immediately in the
population but it stays in a temporary state from which the player can decide whether
it will be added in the population or not. 最后, no speciation exists and diversity is
maintained based on the player’s preferences.
Encoding. The generated content includes weapons which are evolved through par-
ticle systems used in computer graphics for producing non-solid or fuzzy phenomena
such as fire, smoke, 水, explosions, ETC. These particle systems are encoded by CPPNs
and evolved with NEAT.
评估. cgNEAT is evaluated on the Galactic Arms Race (GAR) multiplayer video
game using statistics generated by the players and the evolved content. cgNEAT is able
to evolve a variety of unique and tactically diverse weapons, but it is not compared with
the state of the art.
Evolutionary Computation Volume 29, 数字 1
41
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
A.17 RL-SANE (2009)
Principles. Reinforcement Learning using State Aggregation via NeuroEvolution (RL-
SANE) (Wright and Gemelli, 2009) is a hybrid method combining NEAT and Sarsa(λ)
(Sutton and Barto, 1998). It combines ANNs’ advantage of being good function approx-
imators, able to abstract knowledge and RL’s ability to explore and exploit this knowl-
边缘. 尤其, RL-SANE uses the custom ANNs, evolved by a NEAT version that
allows random pruning [Blended Searching (BS-NEAT) (James and Tucker, 2004)] 作为一个
means to reduce the state space, by aggregating state information into a more compact
表示, so that Sarsa(λ) can be applied to problems with large state space. 这
generated ANNs map inputs from a raw multidimensional space to a one-dimensional
continuum consisting of different discrete states. The ANNs output the state identifier
which is provided to Sarsa(λ) as an index to its Q-table which keeps track of the values
of different actions taken in specific states.
Encoding. RL-SANE uses NEAT’s encoding.
评估. RL-SANE is compared to BS-NEAT (NEAT with structure pruning) (James
and Tucker, 2004) based on the average number of time steps the most fit members of
the population were able to solve two state-of-the-art RL problems. It is found that RL-
SANE performs better than NEAT in both domains and evolves less complex networks.
然而, this is anticipated since in RL-SANE, NEAT evolves ANNs which perform
only state aggregation whereas NEAT’s ANNs perform both state abstraction and pol-
icy iteration which is a much more complicated task. These findings suggest that RL-
SANE can scale to more complicated domains.
A.18 FD-NEAT (2009)
Principles. Feature De-selective NEAT (FD-NEAT) (Tan et al., 2009) extends NEAT
in terms of performing feature selection simultaneously with optimizing the topology
and the weights of ANNs. FD-NEAT differs from FS-NEAT (Section A.3) in the way fea-
ture selection is performed. FD-NEAT starts with the same minimal topology as NEAT,
i.e. with all the input nodes connected to the output nodes. In order to perform feature
选择, a new mutation operator is introduced that is able to drop connections initiat-
ing from the input layer. Implicit feature selection is therefore performed as the GA can
drop connections from irrelevant or redundant inputs that decrease the performance
and keep the relevant ones that increase it.
Encoding. NEAT’s encoding is used.
评估. FD-NEAT is compared to NEAT and FS-NEAT based on the maximum
fitness achieved by the best network, the number of generations required to obtain this
score and the number of evolved connections averaged over the different algorithmic
runs. To assess the feature selection ability two metrics are used: the frequency with
which the population selects the relevant inputs and the sum of the absolute values of
the connections’ weights that originate from each input in the population’s best net-
工作. It is found that FD-NEAT achieves the maximum fitness score in less time than
FS-NEAT and it offers the best compromise between the size of the evolved networks
and their performance.
42
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
A.19 RBF-NEAT and Cascade-NEAT (2009)
Principles. Radial Basis Function NEAT (RBF-NEAT) and Cascade-NEAT (Kohl and
米库莱宁, 2009) are two algorithms extending NEAT, proposed to deal with frac-
tured search spaces, where an agent’s actions change discontinously among states, 经过
capturing the problem’s local features.
RBF-NEAT (Kohl and Miikkulainen, 2009) is proposed as a method that allows local
adjustments to policies, therefore it is suitable for discovering solutions that are discon-
tinuous and can change dramatically. RBF-NEAT extends NEAT by allowing two types
of activation functions in the evolved ANNs: sigmoid and radial basis functions. 要做的事
that a new mutation operator called “add RBF node” is introduced which enables the
introduction of nodes with Gaussian activation functions. The parameters of the Gaus-
sian function are controlled together with all the other parameters by the GA of NEAT.
The new algorithm enables exploration of the space through the normal NEAT muta-
tion operators and in addition it introduces a bias toward local-processing structures
through the RBF node mutations.
Cascade-NEAT (Kohl and Miikkulainen, 2009) constrains the evolved topologies
into regular, cascade structures that can make local refinements, by adding a new mu-
tation operator called “add cascade node.” When such a node is introduced, it receives
connections from all the inputs and the existing hidden nodes and is connected to all
the outputs while it freezes all the preexisting connections to allow mutating only those
connections that concern the recently added hidden node.
Encoding. NEAT’s encoding is used.
评估. The two proposed algorithms are compared against each other, 反对
NEAT and a NEAT version that does not allow structural mutations on problems with
variation. Variation is proposed (Kohl, 2009) as a means to estimate how fractured a
problem is, by treating a solution as a function and calculating its variation. On a prob-
lem of generating solutions with maximal variations, Cascade-NEAT is able to produce
significantly higher variation, while RBF-NEAT is more effective when the number of
inputs is low. The algorithms are also compared on other benchmark supervised and
RL problems in terms of fitness. It is observed that Cascade-NEAT and RBF-NEAT have
significantly higher performance than NEAT; 然而, their scores decrease as the vari-
ation of the problem increases.
A.20 MO-NEAT (2009)
Principles. Multiobjective NEAT (MO-NEAT) (Haggett and Chu, 2009) is a NEAT ver-
sion for dealing with problems with many conflicting objectives. MO-NEAT differs from
NEAT as the fitness function assigns one value for each objective and fitness sharing is
calculated for each objective. 而且, it uses the NSGA-II algorithm (Deb et al., 2002)
as the parent selection mechanism for reproducing, while the offsprings are assigned to
species according to the value of the shared fitness of two objectives. MO-NEAT evolves
ANNs to act as novelty detectors. Any significant deviation in the system’s behavior is
defined as novelty. The evolved ANNs adopt principles from Dynamic Predictive Cod-
英 (DPC) (Hosoya et al., 2005), to allow online learning by continuously updating the
networks’ weights. The hidden and output nodes can have two types of connections:
connections with fixed weights determined by evolution and modifiable connections
whose weights are modified by an anti-Hebbian rule determined by DPC parameters
Evolutionary Computation Volume 29, 数字 1
43
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
that are also subject to evolution and determined by a new mutation operator called
“mutate Parameters.”
Encoding. NEAT’s encoding is altered by adding a new field “connectionType” to the
connections’ genes that determines whether a connection is modifiable or not.
评估. MO-NEAT as a novelty detector is tested on two tasks which are success-
fully solved, while it outperforms the results in Le Borgne et al. (2007) and Sohn et al.
(2001) based on metrics specific to the used datasets and on the percentage of true pos-
itives and false positives.
A.21 Adaptive HyperNEAT (2010)
Principles. Adaptive HyperNEAT (Risi and Stanley, 2010) extends HyperNEAT (秒-
tion A.13) to concurrently evolve patterns of connectivity and learning rules as a function
of geometry, allowing the evolution of plastic ANNs. 这样, the synaptic weights
of the ANNs’ connections do not remain static during the networks’ lifetime but they
have the ability to change in response to the changing activation levels in the neurons
they connect. The advantage of this method is that the rules are derived from the net-
work as a function of geometry and they do not have to be explicitly defined.
Encoding. Adaptive HyperNEAT encodes the connectivity patterns and the learning
rules with indirect encoding using three modified versions of CPPNs. In the first case,
known as iterated model, three additional inputs are introduced in the input layer of
the CPPN that represent the current connection weight wij between two nodes i and
j , the presynaptic activity of node i, oi, and the postsynaptic activity of node j , oj . 在
the second case, known as Hebbian ABC model, the CPPN’s output layer is augmented
with four additional outputs in order to output not only the connection weight but
also the learning rate η and three parameters A, 乙, C for defining the learning rule as
(西德:2)wij = η
[Aoioj + Boi + Coj ]. In the final case, only one additional output representing
the learning rate η is placed on the CPPN’s output layer and the rule of plasticity is
给出的 (西德:2)Wij = η ˙oioj .
˙
评估. The performance of Adaptive HyperNEAT is evaluated on two naviga-
tion scenarios that require the agent to adapt in order to find the position of a reward.
The employed evaluation metrics include the number of generations required to find
a solution as well as the maximum fitness eventually reached. No comparisons exist
between Adaptive HyperNEAT and other NE methods.
A.22 Online NEAT∗2, Online rtNEAT∗2 (2010)
Principles. Online NEAT (Whiteson and Stone, 2006乙) and online rtNEAT (Reeder
等人。, 2008) are two methods for online evolution extending NEAT and rtNEAT, 关于-
spectively. In contrast to offline evolution where agents are trained for once and then
applied on a computer game, online evolution enables the evolution of agents with the
ability to adapt. 而且, online evolution focuses on maximizing the performance of
an agent during the whole learning process in contrast to real-time evolution which fo-
cuses on quickly finding a group of agents that perform well. In onlineNEAT (Whiteson
and Stone, 2006乙) and online rtNEAT (Reeder et al., 2008), the fitness is evaluated on a
number of episodes and it is assigned to each individual according to their performance
so that better individuals are evaluated for more episodes. Toward this goal, 不同的
44
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
selection strategies from the RL domain are adopted including (西德:4)-greedy search, softmax
and interval-based techniques. The authors of Cardamone et al. (2010) modify these al-
gorithms by including an additional evaluation strategy called (西德:4)-greedy improved (Car-
damone et al., 2009), that changes the fitness evaluation by averaging the fitness values
over the different episodes and assigning small time slots to evaluations corresponding
to only a portion of the problem instance. 而且, in Cardamone et al. (2010), the in-
fluence of transfer learning by seeding the evolution with the best individuals evolved
at different tracks of the game, is investigated.
Encoding. NEAT’s encoding is used.
评估. Online NEAT and online rtNEAT with different selection strategies are
compared against each other, against offline NEAT and rtNEAT (Section A.4) on differ-
ent tracks of a car simulator. Their evaluation is based on the average lap time of the
best individuals at the end of evolution or the average lap time during the first and
last laps. The champions are then tested on different tracks of two laps in total and
their performance on the second lap is measured. While online rtNEAT seems to per-
form better than online NEAT in the beginning of evolution, at the end they do not
differ statistically and onlineNEAT can generalize better. 而且, seeding the popu-
lation with good individuals accelerates the learning process and improves the overall
表现.
A.23 Multiagent HyperNEATv2∗2 (2011)
Principles. Multiagent HyperNEATv2 (D’Ambrosio et al., 2011) extends Multiagent
HyperNEAT (D’Ambrosio and Stanley, 2008) so that agents in a multiagent environ-
ment can learn multiple policies as a function of their position (Policy Geometry, PG)
and their current state (Situational Policy Geometry, SPG).
Encoding. Multiagent HyperNEATv2 uses CPPNs as indirect encoding with two dif-
ferent substrates; one ANN describing the individual agents and one describing the
team of the agents. As in original multiagent HyperNEAT, the team substrate contains
the individual substrates but now these are stacked in z dimension reflecting the posi-
tion of the agent within the team (PG). 而且, the team substrate is enhanced with
another dimension S to model the different team policies (SPG). 所以, the substrate
consists of multiple stacks of agents, one for each policy. CPPNs’ topologies are also
changed to include two more input nodes: a node z describing the position of an agent
within the team and a node S describing whether the agent should perform another
task or not. By incorporating this node in the CPPN, the pattern that is generated is a
function of the position of the agent within the team, its current state and its individual
参数.
评估. Multiagent HyperNEATv2 is compared against its previous version (mul-
tiagent HyperNEAT) that evolves policies based on their policy geometry, on a difficult
patrol and return task using both simulation and real robots. The performance of the
two algorithms is evaluated in terms of whether the robots successfully fulfilled the
task and the number of generations. It is found that Multiagent HyperNEATv2 was
more consistent in finding solutions and robust enough to be transferred to real world
scenarios.
Evolutionary Computation Volume 29, 数字 1
45
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
A.24 Recurrent CPPN-NEAT∗ (2011)
Principles. Recurrent CPPN-NEAT (Auerbach and Bongard, 2011) is a NE method
for designing the morphology of robots and the networks that control their policies.
It extends CPPN-NEAT (Section A.6) by allowing recurrent connections in the evolved
CPPN, instead of only feedforward connections. 而且, the method extends a pre-
vious CPPN-NEAT version (Auerbach and Bongard, 2010) that allows evolution to
differentially optimize the size and the quantity of evolved robots’ components. 这
CPPNs have outputs that determine the morphology of the components evolved (例如,
the radius of a spherical component and the presence of joints), the placement of sensors
as well as the embedded closed loop ANNs (CTRNNs) that control the robot’s motion
and policies.
Encoding. NEAT’s direct encoding is used to evolve the CPPNs that determine the
robots’ morphological components. 然而, the CPPNs are also used as generative
encoding that output parameter values of the CTRNNs.
评估. Recurrent CPPN-NEAT is compared to CPPN-NEAT without recurrency
and it evolves more successful robots. The performance metrics used are the fitness
function, the size of the evolved CPPNs (number of nodes, 连接, forward con-
连接, number of hidden nodes with a specific activation function), as well as several
metrics and statistics concerning the evolved morphology (number of spheres, joints,
distant sensors, touch sensors, ETC).
A.25 HyperNEAT-LEO (2011)
Principles. HyperNEAT with Link Expression Output (HyperNEAT-LEO) (Verbanc-
sics and Stanley, 2011) extends HyperNEAT to evolve large-scale ANNs that are char-
acterized by modularity, on top of regularity and hierarchy, as a function of geometry.
Encoding. HyperNEAT-LEO uses CPPNs as indirect encoding, modified to have two
outputs, one that delivers the weight pattern and one that determines whether the con-
nection is expressed (LEO output). With this output, an expression pattern is generated
independently of the weight patterns, separating network connectivity from weight
图案. 而且, modularity can be supported by seeding the CPPNs’ initial topolo-
gies with a hidden node of a Gaussian function that receives the difference of coordi-
nates so that substrate connections close to each other can be encouraged.
评估. HyperNEAT-LEO with and without seeded topology is tested against Hy-
perNEAT with restricted connectivity. To achieve this, two types of thresholds are ap-
plied. When a uniform threshold is applied, a connection is expressed and assigned
the weight given by the CPPN’s output if the output’s magnitude is higher than a
predefined threshold. 另一方面, a dynamic threshold can be used. 这是
updated every time a connection is queried, based on the distance between the con-
nection’s corresponding nodes, encouraging locality (as remote connections should not
be expressed). HyperNEAT and HyperNEAT-LEO are tested on a difficult classification
problem requiring modularity and their performance is evaluated in terms of accuracy
and ratio of successful algorithmic runs. It is found that HyperNEAT-LEO with and
without seeded topologies outperforms HyperNEAT while it has the ability to evolve
ANNs that show modularity. This is determined by visually inspecting the generated
46
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
connectivity patterns of the ANNs and identifying that there are no interconnections
between the different evolved modules.
A.26 IFSE-NEAT (2011)
Principles.
Incremental Feature Selection Embedded in NEAT (IFSE-NEAT) (赖特
等人。, 2012) is a NEAT-based embedded feature selection method. In contrast to FS-NEAT,
which searches the features’ space randomly, IFSE-NEAT performs Sequential Forward
搜索, by adding relevant features to an ANN called backbone. Sequentially, 每一个
the available features is connected to the backbone, which in the beginning has only
output nodes, by zero weight direct connections to the outputs. 然后, a population of
ANNs with the same topology as the backbone, but with different weights, is evolved
by NEAT for a specified number of generations. The champions generated for each of
the available features are compared and the best one becomes the new backbone to
which the remaining features will be sequentially added and NEAT will run again to
evaluate their performance.
Encoding. NEAT’s encoding is used.
评估.
ISFE-NEAT is evaluated on its ability to select a good policy, in terms of
fitness function and its ability to select relevant features calculated as the ratio of the
relevant features among the selected ones. It is compared against NEAT and FS-NEAT
(Section A.3) on a RL problem with a higher ratio of irrelevant features. It is found that
IFSE-NEAT converges to a higher fitness in fewer generations and includes a feature set
with more relevant features than both NEAT and FS-NEAT. 尽管如此, IFSE-NEAT is
computationally more expensive and no statistical test is performed to indicate whether
the difference is significant.
A.27 NoveltyNEAT∗ (2011)
Principles. Novelty search-based NEAT (NoveltyNEAT) (Lehman and Stanley, 2011A)
is an altered version of NEAT guiding the search by rewarding novel behavior, 反而
of better performance by means of fitness optimization. Difficult problems can be char-
acterized by deceptive fitness landscapes, so modeling the fitness function to reward
the intermediate stepping stones required to reach the objective can be difficult. 上
另一方面, search based on novelty is immune to deception and local optima, as it com-
pletely ignores the objective. NoveltyNEAT rewards a behavior whose functionality is
significantly different from what has already been discovered. For this purpose, 十一月-
eltyNEAT keeps an archive of previous novel individuals to which new behaviors will
be compared, driving novelty by coevolution.
A novel behavior is measured by the sparseness of a point in the behavior space
defined as the average distance of that point to its k nearest neighbors. Individuals from
sparse regions receive higher novelty scores. 最后, NEAT’s complexification ability
enables a principled search for novel behaviors and not a random walk.
Encoding. NEAT’s encoding is used.
评估. NoveltyNEAT performs statistically better compared to NEAT with
fitness-based search and to NEAT with random selection. The performances of the al-
gorithms are compared in terms of the average number of evaluations required to find
a solution as well as the number of evolved connections at the end of the evolution.
Evolutionary Computation Volume 29, 数字 1
47
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
A.28 Switch HybrID (2011)
Principles. HybrID (Clune et al., 2011) is a term used to describe a hybridization of indi-
rect and direct encodings proposed to solve problems with different levels of regularity.
Regularity is defined as the “compressibility of the information describing a structure”
(Clune et al., 2011), which can involve symmetries and repeating modules or motifs
(Hornby et al., 2003).
Encoding. Switch HybrID (克鲁恩, 贝克曼, 彭诺克, and Ofria, 2009) is a case
of a HybrID encoding that runs HyperNEAT as indirect encoding that captures the
problem’s regularities and FT-NEAT as direct encoding that captures the irregularities.
FT-NEAT is a simplified version of NEAT that evolves only the weights of ANNs. Hy-
perNEAT runs for a number of generations and evolves regular ANNs which are con-
verted to FT-NEAT’s genome to be further evolved. Both HyperNEAT and FT-NEAT
evolve the weights of fixed topologies ANNs, known as substrates.
评估. Switch-HybrID is compared to HyperNEAT (Section A.13), FT-NEAT and
NEAT on three problems characterized by different levels of regularity and irregularity.
Depending on which datasets are used, different performance metrics are employed,
例如, the average error, the fitness achieved by the champion network or the
distance traveled by a quadruped robot. It is found that HyperNEAT performs better
than the direct encodings on regular problems but not very well when the problem’s
irregularity increases. 另一方面, Switch-HybrID outperforms HyperNEAT
on problems characterized by irregularities but matches its performance on regular
问题.
A.29 MFF-NEAT (2012)
Principles. Modular Feed Forward (MFF) 整洁的 (MFF-NEAT) (Manning and Walsh,
2012) is a coevolutionary NEAT-based algorithm that evolves MFF Networks (MFFNs).
MFFNs decompose a problem into subtasks to be solved by specialized subnetworks
known as expert networks. 然后, an intermediary called a gating network is used to com-
bine the expert networks’ outputs into MFFN-NEAT system’s output. NEAT evolves a
population of MFF-NEAT systems and a population of expert networks that are added
to the MFF-NEAT systems over time. It keeps an archive of the existing expert species
with a record of their fitness values, called “coverage vector,” so that extinct species
can be reevaluated and introduced again in the evolutionary process. New expert net-
works are integrated to MFF-NEAT systems by a novel disassortative evolutionary op-
erator with which selection of parents with dissimilar phenotypic traits is done more
frequently than would be expected in a random selection, to decrease genetic similari-
ties within families.
Encoding. NEAT’s encoding is used.
评估. MFF-NEAT is tested on three classification tasks and it is compared to
NEAT in terms of the best run’s mean absolute error and the generation when the high-
est accuracy is achieved.
A.30 ES-HyperNEAT and ES-HyperNEAT-LEO (2012)
Principles. HyperNEAT (Stanley et al., 2009) determines the weights of an ANN
substrate whose topology is user defined. The user not only places the input and
48
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
output nodes to match the problem’s geometry but also has to determine the num-
ber and location of hidden nodes. Evolvable Substrate HyperNEAT (ES-HyperNEAT)
(Risi and Stanley, 2012A) is proposed to solve this issue by inferring the topography
of the substrate, 那是, the density and the placement of the nodes, by exploiting
information stored in the connectivity pattern evolved in HyperNEAT’s hypercube.
ES-HyperNEAT exploits the fact that every 4D-point in the hypercube represents the
weight of the connection between two 2D points on the substrate. 所以, by taking 2D
cross sections of the hypercube and determining the connectivity of input and out-
put nodes, ES-HyperNEAT can determine the placement of nodes. To choose which
connections will be expressed and therefore which nodes will be included in the sub-
strate, ES-HyperNEAT employs the quadtree algorithm based on the nodes’ weights’
方差. Regions of uniform weight encode little information, but areas with high vari-
ance contain more information and thus more connections should be expressed. 这
variance of the areas is determined by a quadtree decomposition of the weight-space
that reaches higher resolution when the variance is higher. To determine the hidden
节点, ES-HyperNEAT determines the inputs’ outgoing connections and outputs’ in-
going connections. When all the hidden nodes are determined, only the nodes with
connections to both inputs and outputs are kept and the rest are discarded.
Extending ES-HyperNEAT to ES-HyperNEAT-LEO is proposed to evolve large
scale modular ANNs, by modifications in the CPPN encoding. Further extensions
describe the possibility of seeding the initial topology of ES-HyperNEAT and ES-
HyperNEAT-LEO with an initial good structure so that the algorithms would be less
prone to local optima.
Encoding. ES-HyperNEAT’s encoding is the same as HyperNEAT’s. Concerning ES-
HyperNEAT-LEO, CPPNs are augmented with an extra output that determines whether
the CPPN’s output will be expressed, as in HyperNEAT-LEO.
评估. ES-HyperNEAT and its extensions are tested on a task where the agent has
to switch behavior between tasks, a deceptive maze navigation problem and a problem
that requires modularity. The algorithms are evaluated against HyperNEAT (部分
A.13) and HyperNEAT-LEO (Section A.25) with fixed substrates of different topologies.
As performance metrics the average fitness of the champion individual, the fraction of
successful runs, the number of generations required to the solution as well as average
number of evolved hidden nodes and connections are used. ES-HyperNEAT performs
significantly better than both HyperNEAT and HyperNEAT-LEO and HyperNEAT-
LEO performs better than HyperNEAT. 最后, on the difficult modular problem, ES-
HyperNEAT-LEO with geometry seeding performs better than ES-HyperNEAT-LEO
which outperforms ES-HyperNEAT.
A.31 DynNEAT (2012)
Principles. NEAT for Dynamic Fitness Functions (DynNEAT) (Krˇcah, 2012) is an ex-
tension of NEAT proposed for environments of high uncertainty, where the fitness
functions’ optimum is changing rapidly between generations. In NEAT the size of the
species in the next generation depends on the average fitness of the individuals of the
species in the current generation. 然而, DynNEAT takes into account the history
of the species, by choosing the size of the species to be proportional of the maximum
average fitness value of the individuals of the species obtained in the last t generations.
Evolutionary Computation Volume 29, 数字 1
49
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
Encoding. NEAT’s encoding is used.
评估. DynNEAT is evaluated against NEAT, and nonspeciated GA with histor-
ical markings on three function approximation tasks of increasing uncertainty, 使用
the maximum fitness achieved, the portion of successful runs as well as the number
of species evolved as performance metrics. On the problems with static and slowly
moving optimum, DynNEAT shows similar performance to NEAT; 然而, 在
problems where the optimum is moving rapidly DynNEAT outperforms the two other
算法.
A.32 Adaptive ES-HyperNEAT (2012)
Principles. Adaptive ES-HyperNEAT (Risi and Stanley, 2012乙) combines and extends
Adaptive HyperNEAT (Section A.21) and ES-HyperNEAT (Section A.30). It evolves
ANNs substrates whose connectivity is a function of geometry (as in HyperNEAT),
whose topography (nodes’ location and density) is derived by the variance of the con-
nectivity pattern itself (as in ES-HyperNEAT) and whose connections show plasticity,
i.e. adaptation during their lifetime (as in Adaptive HyperNEAT). 总结, Adaptive
ES-HyperNEAT evolves ANNs with some properties resembling those of the natural
脑: 规律性, topography, heterogeneous plasticity and neuromodulation.
Encoding. As in Adaptive HyperNEAT and ES-HyperNEAT, Adaptive ES-
HyperNEAT uses CPPNs as indirect encoding of the ANNs substrates. The CPPN
output layer is augmented with five additional outputs in order to output a modularity
output M, as well as the learning rate η and the parameters A, 乙, C describing the rule
of plasticity, (西德:2)wij = η
[Aoioj + Boi + Coj ]; 那是, the model used is the Hebbian ABC
model that was mentioned in Section A.21.
˙
评估. Adaptive ES-HyperNEAT is evaluated on a navigation task that requires
adaptation and its performance is evaluated by taking the fitness averaged over dif-
ferent runs and the ratio of runs where a solution is found. It is shown that Adaptive
ES-HyperNEAT has a better performance than ES-HyperNEAT. 然而, no compar-
isons to Adaptive HyperNEAT are performed.
A.33 NEATfields (2012)
Principles. NEATfields (Inden et al., 2012) is a multilevel NE method designed for
problems with large input and output spaces, that evolves large ANNs by feeding evo-
lution with externally specified design patterns. NEATfields evolves networks that have
a three level architecture. In the highest level, a NEATfields network is NEAT-like net-
work of fields that are connected as individual nodes are connected in a NEAT network.
The intermediate level consists of fields which are grids of the basic field element and
the lowest level consists of the basic field elements, 那是, a 2D NEAT-evolved Recur-
rent Neural Network (RNN). Three types of connections can be established: local within
a field element, lateral between field elements of the same field, and global between two
fields.
Encoding. NEATfields uses indirect encoding to map the genome to the evolved
NEATfield networks. The genotype consists of global chromosomes for describing the
global connections, as well as chromosomes describing a field element’s nodes and con-
连接. The first gene in a chromosome contains information regarding the 2D size of
50
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
the field and it is followed by genes describing a field element’s nodes and connections.
Every gene is characterized by a global reference number, as the innovation number in
整洁的. The connection genes contain information of the connected nodes, the connec-
tions’ weights, the reference numbers of the source and target nodes, a flag indicating
whether the connection is active, a flag indicating whether a lateral connection is on or
off, and a flag mapping to a specific design pattern.
评估. NEATfields performance is evaluated on three high-dimensional pattern
recognition problems in terms of the ratio of successful runs and the average number of
evaluations in the successful runs. Different NEATfields versions with different design
patterns including dehomogenization, lateral connections, and local feature identifica-
tion are evaluated against each other. 最后, NEATFields, compared to HyperNEAT
on two control tasks, performs better.
A.34 SNAP-NEAT (2012)
Principles. SNAP-NEAT (Kohl and Miikkulainen, 2012) is a method extending NEAT,
RBF-NEAT and Cascade-NEAT (Kohl and Miikkulainen, 2009) (Section A.19) by inte-
grating their different structural mutations. Based on adaptive operator selection, SNAP-
NEAT allows evolution to choose whether it will use NEAT’s structural mutations
(“add-node” and “add connection”), RBF-NEAT’s (“add RBF-node”) or Cascade-
NEAT’s (“add cascade-node”). SNAP-NEAT modifies the Adaptive Pursuit Algorithm
(APA) (Thierens, 2005), which is designed to define the probabilities of selecting an op-
erator so that the probability of the operator with the maximal estimated reward is in-
creased and other probabilities are decreased. In SNAP-NEAT, APA is modified to allow
continuous updates on the values of the operators. This means that each time an indi-
vidual is updated, regardless of whether it underwent a mutation or not, a reward signal
for the operator that contributed last to the individual is generated, allowing to leverage
a larger percentage of information. 而且, since APA is sensitive to the initial condi-
tions of the probabilities of each oi operator (P oi), another modification is proposed so
that the probabilities P oi are not updated in the beginning of evolution but they remain
fixed and uniform. After this evaluation time passes, the information gained is used
to estimate the values of each operator Qoi which is then used to finally compute the
initial operator probabilities P oi.
Encoding. NEAT’s encoding is used.
评估. SNAP-NEAT is tested on problems that are highly fractured and require
high-level strategies as well as on simpler problems that require reactive control. 它是
performance is compared to RBF-NEAT, Cascade-NEAT, NEAT and other state-of-the-
art NE algorithms such as SANE (Moriarty, 1997), ESP (Gomez and Miikkulainen, 1997),
CMA-ES (Hansen and Ostermeier, 2001), 和别的, in terms of the score metric of
each problem. SNAP-NEAT’s performance is comparable to the best algorithm on each
domain, but it has the advantage of automatically selecting which structural mutations
are best suited for each problem.
A.35 SUPG-HyperNEAT∗ (2013)
Principles. Single Unit Pattern Generator (SUPG)-HyperNEAT (Morse et al., 2013) 是
proposed to control the gaits of quadruped robots with long legs. It extends Hyper-
NEAT in terms of evolving substrates of ANNs with a new type of neuron (SUPG). 这
Evolutionary Computation Volume 29, 数字 1
51
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
outputs an activation pattern as a function of geometry and time that can be generated
repetitively and produce oscillations. 而且, the SUPG node consists of a timer that
when triggered by an external event, resets the SUPG activation pattern so that gait im-
perfections in timing can be corrected. Two versions of the SUPG-HyperNEAT method
are proposed depending on whether the evolution is driven by novelty search or by
fitness objectives.
Encoding. SUPG uses indirect encoding of CPPNs that control the output of the SUPG
node by providing the activation pattern, the connection weights, and an offset that is
used in the beginning of the evolution to allow evolving a wide range of gaits. CPPN
also output parameters of the substrate’s nodes, 例如, the bias and receive as
输入, the location of the nodes in the substrate, and the time when the current cycle
began.
评估. SUPG-HyperNEAT is compared to two HyperNEAT-evolved substrates: A
sine wave architecture and a CTRNN architecture, inspired by Clune, 贝克曼, 不自由
等人. (2009) and Téllez et al. (2006) that can evolve oscillatory gaits. The performance
metrics used include the maximum distance traveled by the robot and the complexity of
the evolved CPPNs (number of hidden nodes and connections). Even though all meth-
ods can evolve successful robot gaits, SUPG-HyperNEAT evolves more robust gaits that
allow the robot to move for a longer period.
A.36 MSS-HyperNEAT (2013)
Principles. Multi-Spatial Substrate (MSS) HyperNEAT (Pugh and Stanley, 2013) 是
extending HyperNEAT (Section A.13) by determining the right configuration of the
substrate via placing different input and output modalities on their own geometrically
independent planes. When no geometric relationship between two groups of neurons
存在, the neurons are placed into separate planes, whereas the logically related neu-
rons are grouped together.
Encoding. MSS-HyperNEAT uses HyperNEAT’s indirect endoding. 然而, 这
structure of the CPPNs is altered to include more outputs that express the connectivity
among the different planes. 尤其, the new CPPNs will consist of M + N out-
puts where M is the number of planes with non-input neurons and N is the number of
unique pairs between connected spaces.
评估. MSS-HyperNEAT is evaluated on a maze exploration and group coordi-
nation task of multiple agents. Two MSS substrates on which the input and outputs
are organized in different planes according to their functionality are compared against
HyperNEAT with regular fixed substrates, called crowded substrates. The two meth-
ods are compared based on the average best fitness across different maze environments
and across different runs as well as the proportion of runs that gave a good result. 这是
found that MSS-HyperNEAT outperforms crowded substrate HyperNEAT.
A.37 Adaptive HyperNEATv2∗ (2013)
Principles. Adaptive HyperNEATv2 (Gallego-Durán et al., 2013) extends Adaptive
HyperNEAT (Section A.21) by defining a rule of plasticity that takes into account the
presynaptic and post synaptic activities of n previous time steps.
52
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
Encoding. Adaptive HyperNEATv2 uses indirect encoding and especially in the for-
mat of the iterated CPPN model that was used in Adaptive HyperNEAT, but its archi-
tecture is modified in order to include new outputs that correspond to coefficients of
the new plastic rule.
评估. Adaptive HyperNEATv2 is compared to the three models used by Adap-
tive HyperNEAT: iterated, Hebbian ABC, and plain Hebbian. The algorithms are eval-
uated on a complex environment of simulated racing in terms of the race score and
the number of CPU cycles on the same processor. Adaptive HyperNEATv2 is compu-
tationally less expensive than Adaptive HyperNEAT’s iterated model, but it does not
outperform it.
A.38 NEAR (2013)
Principles. Echo State Networks (ESNs) are a type of Recurrent Neural Networks
(RNNs) from the field of Reservoir Computing. 起初, ESNs constituted a ran-
domly generated reservoir of sparsely connected neurons. The connections among the
inputs and the reservoir as well as the connections of the neurons of the reservoir are
assigned once and remain fixed. The only trainable weights are the output weights
which connect the reservoir to the output nodes. These can be determined through
supervised learning (例如, linear regression), RL (例如, Sarsa temporal differences), 或者
policy search (例如, 进化计算). 然而, the random generation of the
reservoir is considered insufficient whereas the design of a specific reservoir for a spe-
cific task seems more appropriate. Toward this purpose, Neuroevolution of Augment-
ing Reservoirs (NEAR) (Chatzidimitriou and Mitkas, 2013) was developed as a hybrid
evolutionary-learning method which uses NEAT to evolve the reservoir of the ESNs
and learning to learn the output layer. It is expected that the synergy between evolu-
tion and learning can yield better results since evolutionary computation can be used
to locate a wider area wherein the global minimum is situated and local search can be
used to refine the search and locate it.
NEAR is different from NEAT in terms of evolving ESNs instead of standard ANNs,
starting the evolution with one neuron in the reservoir, having direct connections
among the input and output nodes and performing speciation based on macroscopic
features of the reservoirs instead of structural similarities. The networks are grouped
in species based on a threshold on the value δ = cα|ρ−ρr |
, where r
corresponds to the representative of the species, ρ is the reservoir’s spectral radius, 氮
is the number of neurons in the reservoir, D is the reservoir’s density, and cα, cβ , cγ
predefined parameters.
+ cβ |D−Dr |
博士
+ cγ |N−Nr |
Nr
ρr
At each generation, the genomes are converted to ESNs and they pass to the eval-
uation phase for a number of episodes. Then the output weights are adapted by using
either TD learning or standard weight mutation, followed by evolution by NEAT. 两个都
Lamarckian and Darwinian evolution are enabled. In Lamarckian evolution, the learned
output weights are transferred back to the genome for further evolution whereas in
Darwinian evolution the output weights are reinitialized at the beginning of each
一代.
Encoding. NEAR uses direct encoding of a genome including the weights of the input
连接, the output weights, the weights of the reservoir, as well as reservoir pa-
rameters such as the density and the spectral radius ρ used for the normalization of the
reservoir weights.
Evolutionary Computation Volume 29, 数字 1
53
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
评估. NEAR is evaluated on time series and RL domains. On the time series
数据, two versions of NEAR, NEAR+LS and NEAR+MUT, are compared to standard
ESNs with a fixed number of reservoir nodes and to a state-of-the-art algorithm for
optimization of the reservoir’s structure. NEAR+LS uses least squares for the learning
of output weights whereas NEAT+MUT uses mutations. The performance comparisons
are based on the NRMSE value on an unseen validation data. In the RL tasks, 三
versions of NEAR, NEAR+TD-L (TD learning and Lamarckian evolution), NEAR+TD-
D (TD learning and Darwinian evolution), and NEAR+PS (policy search) are compared
to ESN+TD (ESNs with TD learning) and NEAT. It is not clear from the paper whether
NEAR+PS and NEAR+MUT refer to the same method since they both use mutation
operators to adapt the output weights. As performance metrics, the average accrued
reward over episodes by the champion network as well as the number of evaluations
before a solution is found are used. The champion network is also evaluated on another
set of episodes so that the generalization performance of the champion network can
also be reported. 一般来说, NEAR through learning and evolution was able to find
ESNs that solved the problems, which is not always the case with ESNs with random
generated reservoirs.
A.39 Layered NEAT (2013)
Principles. Layered NEAT (王等人。, 2013) is a new algorithm that accelerates the
computational time of NEAT by a) sorting of the evolved topology in layers, 乙) identi-
fication of recurrent connections, and c) increasing the size of the population over the
course of generations. By sorting the nodes in layers, Layered NEAT introduces an ef-
ficient way of calculating the output of an ANN by first calculating the outputs of the
节点 (“activating the nodes”) placed in earlier layers. The identification of recurrent
cycles also facilitates the aforementioned calculation as it allows for only an additional
activation of the nodes that belong to the specific cycle. 而且, Layered NEAT starts
the evolution with a small population of networks whose size increases with the course
of generations following a sigmoid-like function and a specified rate. 最后, Layered
NEAT allows feature selection by starting the evolution with initial topologies of min-
imally connected inputs (in a specific dataset the number of initially connected inputs
varied from 1 到 8) and allowing evolution to select the relevant inputs, which is similar
to FS-NEAT (Section A.3).
Encoding. Layered NEAT changes NEAT’s encoding by introducing two new fields
in the node genes and one new field in the connection genes. In the node genes, 这
first field contains the location of a node that is updated as new nodes and connections
are inserted, while the second field marks whether a node belongs to a recurrent circle.
相似地, the new field in the connection genes is used to indicate whether a connection
that is added creates a cycle or not.
评估. Layered NEAT is compared to NEAT on the well-known XOR problem by
comparing the computational time required by the two algorithms on the same CPU.
The comparison shows that when recurrent connections are allowed, Layered NEAT
is four times faster than NEAT. 此外, the average fitness value and the num-
ber of evolved connections and nodes are used as performance metrics on a multiclass
classification problem, but no comparisons to NEAT are made.
54
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
A.40 FNS-NEATFields∗ (2013)
Principles.
In Fitness- and Novelty-based Selection mechanisms-NEATfields (FNS-
NEATFields) (Inden et al., 2013) the influence of different selection mechanisms on
NEATfields (Section A.33) is investigated. These include tournament selection, selec-
tion mechanisms based on genotypic or behavioral similarities, and hybrid methods of
both types of selection mechanisms.
Encoding. NEATfields encoding is used.
评估. The different selection mechanisms are applied on benchmark problems
and their performance is evaluated using the ratio of achieved fitness divided by the
number of generations required to reach the fitness. Although a particular selection
mechanism that outperforms all others is not found, 一般来说, hybrid methods perform
better than pure novelty-based or fitness-based methods.
A.41 Phased NEAT (2013)
Principles. Phased Searching with NEAT in a Time Scaled Framework (Phased NEAT)
(Tan et al., 2013) extends NEAT by allowing both structure complexification and sim-
plification during evolution. Phased Searching NEAT alternates between complexifi-
阳离子 (adding structure) and simplification (removing structure) that occur in every
predefined number of generations. 这样, feature selection/deselection is also per-
formed since input connections can be added and removed.
Encoding. NEAT’s encoding is used.
评估. Phased Searching NEAT is compared to NEAT and FD-NEAT (部分
A.18) using the metrics of sensitivity and the size of the evolved networks (number of
连接), both on the champion network and on the whole population at the end
of the evolution. Phased searching NEAT does not perform significantly different than
整洁的, but it can evolve significantly smaller and less complex networks.
A.42 HyperNEAT-CCT (2014)
Principles. HyperNEAT with Connection Cost Technique (HyperNEAT-CCT)
(Huizinga et al., 2014) is extending HyperNEAT-LEO (Verbancsics and Stanley,
2011) (Section A.25) in order to produce ANNs that are modular and regular. 甚至
though HyperNEAT-LEO can evolve modular ANNs, the authors argue that seeding
the topology with the Gaussian function (HyperNEAT-GS) may not be beneficial in the
长期, as it does not improve the fitness in the short term; 所以, the seed may
be removed during the course of evolution. Thererefore, an extension of HyperNEAT-
LEO is proposed to treat the problem as a multiobjective optimization problem. Three
objectives need to be optimized; maximizing the networks’ performance on a test
问题, maximizing the behavioral diversity and minimizing the connectivity costs.
The connection cost is calculated as the sum of the connections’ squared lengths in
the phenotype, a technique adopted from Clune et al. (2013). NEAT is altered to not
perform crossover when evolving the CPPNs that encode the genome. 而且, A
speciation mechanism that encourages behavioral instead of genotypic diversity is
用过的. To calculate the behavioral diversity of a network, the output for every possible
Evolutionary Computation Volume 29, 数字 1
55
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
input is stored in a binary vector and the average Hamming distance to the vectors of
all the other networks is calculated.
Encoding. HyperNEAT-CCT uses indirect encoding by NEAT-evolved CPPNs, as de-
scribed in Section A.25, without Gaussian seeding. The CPPNs output the weights and
the biases of the ANN substrate as well as the pattern of connectivity expression by the
LEO output whose activation function is changed to a hyperbolic tangent.
评估. HyperNEAT-CCT is evaluated against HyperNEAT (Section A.13),
HyperNEAT-GS, and Direct-CCT (Clune et al., 2013), 在 1 到 3 problems with modu-
larity and regularity challenges. Their ability to evolve structurally modular networks
is evaluated in terms of the Q-score (纽曼, 2006). To assess functional modular-
ity two metrics are used (Clune et al., 2013): modular decomposition and number of
solved subproblems. To calculate the former, the network is split up in as many splits
as the maximum number of subproblems, and then whether inputs of different sub-
problems correspond to different modules is tested. To calculate the latter, it is tested
whether for every subproblem a node exists that linearly separates its positive and neg-
ative classes. The weights and biases of the networks are encoded into an ASCII string
and compressed using the Lempel–Ziv–Welch algorithm. Regularity is evaluated by the
compression rate, and we evaluate it by how much fraction the string is compressed.
HyperNEAT-CCT performs better than both HyperNEAT and HyperNEAT-GS and pro-
duces networks that are both modular and regular. Although Direct-CCT performs bet-
ter than HyperNEAT-CCT, it lacks the ability to produce regular ANNS, which is an
intrinsic property of HyperNEAT and therefore of HyperNEAT-CCT.
A.43 Seeded (Adaptive) HyperNEAT (2014)
Principles. Seeded HyperNEAT and Seeded Adaptive HyperNEAT (Risi and Stanley,
2014) are extending HyperNEAT (Stanley et al., 2009) (Section A.13) and Adaptive Hy-
perNEAT (Risi and Stanley, 2010) (Section A.21) to evolve ANNs whose weights can be
self-organized to form topographic maps of the input stimuli. The resulting ANNs ex-
hibit the natural brain’s feature of topographic maps, 那是, neurons that are spatially
organized to map the sensory input.
Encoding. Both algorithms use CPPNs as indirect encoding. CPPNs can be seeded
with hidden nodes that output SOM connectivity and can be further evolved. CPPN
with seed can be queried to output the static weight of connections within the output
substrate. CPPNs are also queried to output the weight of a connection between the
input and output substrate together with its learning rate.
评估. Seeded HyperNEAT and Seeded Adaptive HyperNEAT are evaluated
互相对抗, against other seeded methods that set the weights between the input
and output substrate in different ways and against unseeded HyperNEAT. The meth-
ods are tested on a line orientation task and the performance metrics used include the
fitness function, the number of generations required to reach the best result, and a gen-
eralization metric testing the ratio of successfully finding the target weights within a
predefined margin. It is found that the seeded methods perform better, accelerating the
self-organization process and biasing it to a desired configuration. 而且, seeded
HyperNEAT performs better than seeded Adaptive HyperNEAT indicating the diffi-
culty of learning simultaneously both the learning rate and the weight patterns.
56
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
A.44 NS-FE-CPPN-NEAT∗ (2015)
Principles.
In Methenitis et al. (2015), two extensions of CPPN-NEAT (Section A.6) 是
proposed to evolve the morphology and the locomotion of soft robots for space explo-
配给. Novelty-Search CPPN-NEAT (NS-CPPN-NEAT) guides the search by rewarding
novel behaviors, while NS-FE-CPPN-NEAT combines Fitness-based Elitism (FE) 和
Novelty Search (NS). 在这种情况下, the best individual in terms of fitness is copied to the
next generation and novel behaviors are sought.
Encoding. NS-FE-CPPN-NEAT is an extension of CPPN-NEAT, so it uses NEAT’s di-
rect encoding to evolve the CPPNs which are queried for the coordinates of each voxel
of a 3D lattice describing a particular material type used to evolve the soft robots.
评估. NS-FE-CPPN-NEAT is compared with CPPN-NEAT with fitness defined
目标, pure novelty search CPPN-NEAT, random search CPPN-NEAT, and a classic
遗传算法, using as metric the normalized displacement of a robot from its initial position. 它
is found that novelty search improves the performance and the diversity in the fitness
space while contributing in a larger variety of morphologies.
A.45 Deep HyperNEAT∗ (2015)
Principles.
In Verbancsics and Harguess (2015), two extensions of HyperNEAT
(Section A.13) for application in deep classification problems are proposed. 第一的, Hy-
perNEAT evolves CPPNs of a feed forward ANN substrate. The difference with Hyper-
NEAT is that in this case the outputs of the CPPNs play the role of the learned features
that can be provided as inputs to a machine learning method (例如, ANNs and KNNs)
that will perform the final classification based on backward propagation. In the sec-
ond case, HyperNEAT evolves CPPNs to learn Convolutional Neural Networks (CNNs)
(Deep HyperNEAT) that have the topology of the LeNET5 network (LeCun et al., 1998)
and will act as the deep learning classifier.
Encoding. HyperNEAT’s encoding is used.
评估. The method is tested on two image classification problems. Four versions
of HyperNEAT are compared, HyperNEAT as a classifier that learns either ANNs or
CNNs and HyperNEAT as a feature extractor using both ANNs and CNNs. 为了
comparisons on the MNIST dataset, the fitness function and the fraction of correct clas-
sifications are used. Moreover on the BCCT200 dataset (Rainey and Stastny, 2011) Hy-
perNEAT as a feature extractor with CNN architecture is compared to other machine
learning methods. It is found that the combination of NE with other machine learning
methods is better compared to applying only NE or only machine learning algorithms.
A.46 PIGEON (2015)
Principles. Particle swarm Intelligence and Genetic algorithms for the Evolution and
Optimization of Neural networks (PIGEON) (Stein et al., 2015) is a hybrid algorithm
based on NEAT and Particle Swarm Optimization (PSO) for evolving agents that show
tactical behavior, 那是, behavior that resembles the humans’ behavior when facing
the same situation. In PIGEON, NEAT evolves the structure of the ANNs and PSO op-
timizes the connection weights based on the weights of the best individual in the species
and the weights the individual had in its previous best performance. PSO is combined
with NEAT in two ways: PIGEON-Chain and PIGEON-Alternate. In PIGEON-Chain,
Evolutionary Computation Volume 29, 数字 1
57
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
NEAT runs for a predefined number of generations evolving the structure and (subopti-
马尔) weights that are later optimized by PSO. 另一方面, in PIGEON-Alternate,
NEAT and PSO are applied in turns.
Encoding. The structure and the weights of the ANNs are encoded with NEAT encod-
英, while the weights optimized by PSO are represented in each particle of the PSO
population by a list of real-valued numbers.
评估. PIGEON is tested on two learning schemes used for developing tactical be-
行为: an observational and an experiential learning approach on three datasets. Dur-
ing observational learning, a human controls the way an entity performs a task. 期间
this phase, data are collected so that they can be used to train the agent to mimic the
human behavior. A similarity factor is calculated to evaluate how well the agent ap-
proximates the human behavior. Experiential learning resembles RL, where the agent
learns how to behave based on which actions yielded higher performance.
PIGEON-Chain and PIGEON-Alternate are compared against each other and
against NEAT and PSO. The similarity factor and the fitness value are used as per-
formance metrics in observational and experiential learning, 分别. 一般来说,
PSO outperforms all the other algorithms in all the experiments of observational learn-
英. 另一方面, NEAT and PIGEON-Alternate perform better than the other
algorithms in the experiential learning tests. 虽然, a general conclusion cannot be
drawn for all the domains; in complex domains PIGEON-Alternate performs better,
faster and evolves smaller networks.
A.47 PFS-NEAT (2015)
Principles. Predictive Feature Selection NEAT (PFS-NEAT) (Loscalzo et al., 2015) 是
an embedded feature selection method for RL that uses NEAT as the genetic policy algo-
rithm. The algorithm starts with a population of fully connected networks and identifies
the relevant features by alternating NEAT-based evolution with feature selection. Fea-
ture selection is performed using the Best First subset search (徐等人。, 1988), 这是一个
variant of Sequential Forward Search. This method is able to identify feature interaction
and it is beneficial in cases where a feature is relevant only in combination with other
特征.
The algorithm gathers samples (states and actions) that are incorporated into a
dataset D during the fitness evaluation of the whole population. The rewards obtained
for each of the states are used as the class labels of these samples. Feature selection based
on features scoring is then applied on the dataset D to identify the best features. 这
selected features are integrated in the topology of the best network through connec-
tions to all the outputs. These connections are assigned zero weights, so that the best
identified policy will not degrade. The features are also integrated with the rest of the
population through connections to the output nodes of random weights. 然后, 整洁的
evolution follows for a number of generations until stagnation, 那是, until the fitness
of the best network does not improve above a threshold for a specified number of gen-
erations and then feature selection is applied again. The whole process repeats until a
termination criterion is met.
Encoding. PFS-NEAT uses NEAT as a genetic policy search algorithm, so NEAT’s en-
coding is used.
58
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
评估. PFS-NEAT is significantly better than NEAT (Stanley and Miikkulainen,
2002乙), FS-NEAT (Whiteson et al., 2005) (Section A.3), FD-NEAT (Tan et al., 2009) (秒-
tion A.18), and SAFS-NEAT (Loscalzo et al., 2012) in terms of the accumulated fitness
价值, the number of selected features and the ratio between relevant and irrelevant
那些.
A.48 odNEAT (2015)
Principles. Online Distributed NEAT (odNEAT) (Silva et al., 2015) is a decentralized
(分散式) NE algorithm for the online evolution of robots that can learn and self-
adapt in long term. In online evolution the robots continuously optimize their behavior
by executing the evolutionary algorithm during the execution of the task. In odNEAT
two types of reproduction exist; inter-robot and intra-robot reproduction. During inter-
robot reproduction, the robots can exchange candidate solutions by broadcasting a copy
of their active genome of a competitive fitness score to their neighboring robots. When a
robot receives the copy, it checks whether the genome already exists in a local list (“tabu”
列表), which contains the recently failed genomes. If the received genome is topologically
similar to one of the genomes in this list, it does not get incorporated into the robot’s
internal population. If the received genome already exists in the population, then it is
used for recalculating the average fitness, thus providing a more accurate estimate of
the fitness. If the robot’s internal population is complete, the received copy will replace a
poorly performing genome. During the intra-robot reproduction, a top species is selected
for traditional NEAT-based reproduction. In contrast to NEAT, this type of reproduction
takes place only when a robot performs poorly, which is indicated by the robot’s perfor-
mance measure, called “virtual energy.” Then, two parents selected from a top species
are used to crossover and their offspring is mutated to generate the new genome. 这
new genome is assigned a maturation period of time which means that the new con-
troller is given time to exhibit its performance in the deployed environment that may
be characterized by different environmental conditions.
Encoding. odNEAT uses NEAT’s encoding replacing the innovation markers with
time stamps that function as chronological parameters, assigned to the genome when a
new connection or a new node is introduced.
评估. odNEAT is compared to modified versions of rtNEAT (Stanley et al., 2005)
(Section A.4) and IM-(μ + 1) (Haasdijk et al., 2010). 一方面, rtNEAT is a cen-
tralized method for online evolution of robotic controllers, whereas IM-(μ + 1) is a de-
centralized method not based on NEAT but following some of the NEAT principles
such as speciation, complexification, and innovation markers. rtNEAT and IM-(μ + 1)
are modified to generate an offspring only when their energy level reaches a predefined
minimum threshold, and IM-(μ + 1)’s random assignments of innovation markers are
replaced with odNEAT’s timestamps.
The performances of odNEAT, rtNEAT, and IM-(μ + 1) are evaluated in four as-
pects: the number of evaluations, the fitness score, the total number of evolved connec-
系统蒸发散, and nodes, which indicates the complexity of the solutions and the generalization
能力. To measure the generalization ability, each task is restarted 100 times per run
with different initial robots. The robotic controller is not allowed any further evolution
and it is considered to generalize well if its virtual energy does not decrease to zero. 在
the majority of the tasks, it was found that odNEAT statistically outperforms rtNEAT
Evolutionary Computation Volume 29, 数字 1
59
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
and IM-(μ + 1) in most of the metrics, or performs as good as the other algorithms but
resulting in less complex networks.
A.49 odNEATv2∗ (2016)
Principles. odNEAT with online racing and population cloning abilities (odNEATv2)
(Silva et al., 2016) is proposed as an extension to odNEAT (Silva et al., 2015) (部分
A.48) to accelerate online evolution in multirobot systems. Racing is proposed to re-
duce the time dedicated for evaluating poorly performing controllers. The evaluation
time refers to the period of time assigned to a controller between its generation and its
再生产. With racing, controllers are evaluated in parallel so that the ones whose
fitness is significantly lower than a dynamic threshold, known as minimal criterion,
are discarded. Cloning is proposed to take advantage of the genetic information gath-
ered by multiple robots by transferring a set of good performing individuals to nearby
robots. When two robots approach, their internal population is compared based on the
minimal criterion which represents the performance of the population. The “winner”
robot transfers individuals with fitness greater than the minimal criterion to the “loser”
robot. In another version of the cloning algorithm, the “loser” robot should “kill” those
individuals whose fitness is lower than the minimal criterion.
Encoding. odNEATv2 is built on top of odNEAT, therefore odNEAT’s encoding is
用过的.
评估. Different cases of odNEATv2 are evaluated against each other: odNEAT
with racing, odNEAT with racing and cloning without individual extinction, odNEAT
with racing and cloning with individual extinction, and original odNEAT on three mul-
tirobots tasks, using the mean fitness of the group of controllers in the end of evolution
as well as the operational time of the controllers compared to the simulation time of the
实验. It is found that odNEATv2 (combining racing and population cloning) 关于-
sults in highly performing agents, with consistent group-wise performance as well as
faster evolution.
A.50 τ -NEAT (2016)
Principles. τ -NEAT (Caamaño et al., 2016) is an extension of NEAT for modeling com-
丛, 颞, dynamic systems. Even though NEAT enables the modeling of dynamic
systems by recurrent connections, τ -NEAT extends this ability to model more complex
time series by introducing a time delay in every connection of the evolved networks.
This delay is implemented through a First In First Out (FIFO) buffer of size τ . The size
of a buffer corresponds to the time of the delay imposed on the input of that connection
and is mutable through a new mutation operator called τ -mutation. 而且, τ -NEAT
modifies NEAT’s weight mutation operation, now called Non-Uniform mutation to de-
crease the mutation step as evolution progresses, allowing more refined search.
Encoding.
sponds to the synaptic delay, i.e. the size of the buffer τ .
τ -NEAT introduces a new field in the NEAT’s chromosomes that corre-
评估. The performance of τ -NEAT is compared to NEAT’s using the Mean
Square Error (均方误差) and the Mean Absolute Percentage Error (MAPE). When τ -NEAT is
applied on time series/temporal data, it performs better than NEAT achieving smaller
error and predicting the complex time series with more precision. When it is applied
60
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
to problems of cognitive behavior modeling, it is found that the delays introduced by
τ -NEAT outperform the recurrent connections introduced by NEAT. 然而, no sta-
tistical hypothesis tests are performed and no standard deviations are reported.
A.51 MAP-Elites CPPN (2016)
Principles.
In Tarapore et al. (2016), the authors investigate using CPPNs as the en-
coding for MAP-Elites. MAP-Elites is described as an illumination (Mouret and Clune,
2015) or quality diversity (Pugh et al., 2015) algorithm. 在本文中, MAP-Elites acts
as the EA of the “Intelligent Trial & Error algorithm” (Cully et al., 2015) that allows
robots to learn creative behaviors in order to adapt to unexpected situations such as
damage. MAP-Elites maps high performing solutions, called the elites, to the points of
a behavioral space. It has a large number of niches that represent different types of so-
lutions and returns the highest performing solution of each (Tarapore et al., 2016). 在
MAP-Elites there is a pressure for both novelty and performance. Tarapore et al. 使用
CPPNs to evolve Central Pattern Generators (CPG), 人工神经网络 (as a simpler version of Hy-
perNEAT), SUPG, and constrained SUGP and they use three behavioral descriptors of
6 dimensions each.
Encoding.
ing activation functions: sine, Gaussian, sigmoid and linear.
Indirect encoding of CPPNs is used. CPPNs are allowed to have the follow-
评估. The different encodings are compared among each other and against di-
rect encoding on a legged locomotion task in simulation and real robots using quality
指标 (Mouret and Clune, 2015) appropriate for the behavioral space: global fitness,
覆盖范围, global reliability, 和精度. It is found that direct encoding outperforms
the indirect encoding.
A.52 NEAT-LSTM (2016)
Principles. NEAT-LSTM (Rawal and Miikkulainen, 2016) is a hybrid method evolving
Long Short Term Memory (LSTM) units for problems that require memory. 一个典型的
LSTM unit consists of a memory cell and three control gates: a write gate that controls
the input that is directed to the memory, a forget gate that regulates how much of the
stored memory should be transferred to the next time step, and the output gate that
controls the output of the unit. 还, peep-hole connections exist that allow access to the
values of the memory cell. NEAT evolves the number of LSTM units and the connections
from the external logic (写, forget, 并阅读) to the control gates and the weights of
the peep-hole connections.
NEAT-LSTM is further extended to NEAT-LSTM with Information Maximiza-
的 (NEAT-LSTM-IM) for application to deceptive optimization problems that re-
quire deeper memory. Instead of treating the problem as a multiobjective problem, A
pre-training step of unsupervised learning is introduced. 这样, NEAT-LSTM is
evolved in two steps: an unsupervised and a RL step. During the first phase, NEAT is
used to evolve LSTM units that are able to capture highly informative and independent
features by maximizing the information that is stored inside the memory cells. 要做的事
这, the features are partitioned into their histogram and they are compared using the
values of entropy and mutual information. Highly informative, independent features
are the ones with high individual entropy and low mutual information. In a second
phase, the write, forget, and input logic gates are frozen and NEAT uses the already
Evolutionary Computation Volume 29, 数字 1
61
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
learned features to evolve the read logic and add more hidden layers on top of the ex-
isting LSTM network.
Encoding. NEAT is used to evolve a different type of network (IE。, LSTM networks),
so we assume that there is no change in the encoding of NEAT.
评估. NEAT-LSTM is compared to original NEAT that evolves RNNs (整洁的-
RNN) and to NEAT-LSTM-IM. As a performance metric, the average success rate is
用过的, 那是, the ratio of trials that give a solution with a maximum fitness. In a sim-
ple sequential classification task, NEAT-LSTM significantly outperforms NEAT-RNN
and in a sequence recall task, NEAT-LSTM-IM outperforms both NEAT-LSTM and
NEAT-RNN.
A.53 MM-NEAT (2016)
Principles. Modular Multiobjective NEAT (MM-NEAT) (Schrum and Miikkulainen,
2016) extends NEAT to evolve agents for the Ms Pac Man video game that requires
different behaviors on different tasks. The problem is treated as a multiobjective opti-
mization problem and NSGA-II algorithm (Deb et al., 2002) is used. MM-NEAT evolves
modular ANNs that consist of multiple output modules corresponding to different poli-
化学系. To determine which module should be activated preference neurons are used in each
module. 这样, a module is activated if its preference neuron’s output has the high-
est value with respect to others. MM-NEAT can start the evolution with networks of one
output module and add new output modules through a new mutation operator called
Module Mutation. Different versions of the module mutation operator exist, 基于
how a new module is connected to a network’s existing topology.
Encoding. NEAT’s encoding is used.
评估. MM-NEAT that evolves modular networks whose number of modules
is predefined is evaluated against MM-NEAT with Modular Mutations and multitask
学习 (human-specified modularity). Their performance is evaluated in terms of the
champion’s average fitness value over the independent runs, a post-learning score com-
puted by further evaluating each run’s champion in additional evaluations, and the per-
centage of time that this champion employs its most used module. 一般来说, preference
neurons in MM-NEAT with modular mutations or fixed number of modules perform
better than multitask learning.
A.54 MB-HyperNEAT (2016)
Principles. Multi-Brain HyperNEAT (MB-HyperNEAT) (Schrum et al., 2016) is a term
used to describe a set of algorithms for evolving agents that exhibit complex multimodal
行为. MB-HyperNEAT evolves agents with multiple “brains” (ANN substrates),
each of which applies a different policy. In contrast to multiagent HyperNEATv2, 这
evolved policies do not depend on the agents’ geometric relationships and the task divi-
sion is not human defined. MB-HyperNEAT combines HyperNEAT’s and MM-NEAT’s
benefits of indirect encoding and ability to evolve multimodal behaviors.
Three algorithms belong to the MB-HyperNEAT family: multitask CPPNs, substrate
brains with preference neurons, and CPPNs with module mutation. In the first case, CPPN
have a predefined set of multiple output modules, like in multitask learning, 每一个
which corresponds to a different brain. In the second case, the CPPNs’ output modules
62
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
and the substrate include a preference neuron that determines when a module should
be activated. The number of modules can be predefined by the user or evolved by MM-
NEAT’s Module Mutation operator, which results in the third algorithm.
Encoding. HyperNEAT’s encoding is used.
评估. The different versions of MB-HyperNEAT (MultiTask CPPNs, CPPN
with preference neurons, and CPPNs with preference neurons and module muta-
tion operators) are compared against each other, against multiagent HyperNEATv2
(D’Ambrosio et al., 2011) (Section A.23) and HyperNEAT with one module (斯坦利
等人。, 2009) (Section A.13) on different RL problems that require multimodal behavior.
The fitness of the champion network at the end of evolution averaged over the different
runs is used as a performance metric. In all cases, multimodal networks outperform the
standard HyperNEAT that uses one module. 一般来说, it is observed that multitask
CPPNs perform better than both multiagent HyperNEATv2 and CPPNs with prefer-
ence neurons.
A.55 PLPS-NEAT-TL (2017)
Principles. Power-Law ranking probability-based Phased Searching NEAT for Trans-
fer Learning (PLPS-NEAT-TL) (Hardwick-Smith et al., 2017) is an algorithm extending
NEAT by proposing phased searching, 那是, alternating between complexification and
simplification. The goal is to produce effective and simple ANNs on a source task that
can be transferred to a target task. The algorithm consists of two phases: a source task
learning phase and a target task learning phase. During the first phase, PLPS-NEAT
learns an ANN by alternating between complexification and simplification, by defin-
ing a probability of removing connections and hidden nodes. The difference with re-
spect to other phased searching NEAT-based algorithms, 例如, Tan et al. (2013),
is that selecting structure (connections and hidden nodes) to be removed is not done
randomly, but based on a ranking, so that structure that is not important to the network
is removed. This ranking is performed, for the connections according to the absolute
value of their weights and for the nodes based on the number of connections that are
linked to them. At the end of the source task learning phase, transfer learning takes
place by initializing a second learning phase with the best evolved ANN from the pre-
vious phase. In the target task learning, traditional NEAT (without phased searching)
is used to learn a target task.
Encoding. NEAT’s encoding is used.
评估. PLPS-NEAT-TL is tested against other phased searching NE methods i.e.
Phased NEAT (Tan et al., 2013, 2014), Green’s Phased Searching (GPS-NEAT) (绿色的,
2004), and NEAT with Blended Searching (BS-NEAT) (James and Tucker, 2004) to evalu-
ate the size of the evolved networks (number of connections and nodes) after the source
task learning phase. 而且, the transferability of learning is evaluated based on the
fitness achieved by the best ANN at the end of the target task learning. PLPS-NEAT-TL
shows competitive performance against other evaluated algorithms and it is capable of
controlling the complexity while providing good performance, signifying the impor-
tance of controlling structure’s removal during the simplification phase.
Evolutionary Computation Volume 29, 数字 1
63
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
A.56 TMO-NEAT∗ 2017
Principles. Tensor-based Mutation Operator NEAT (TMO-NEAT) (Marzullo et al.,
2017) is a NEAT-based algorithm that uses tensor-based analysis to adaptively compute
the mutation rates for weight mutation in order for a better offspring to be created. 这是
based on the ability of an ANN to be represented as a graph whose vertices and edges
correspond to the network’s nodes connections respectively. The graph is represented
by an adjacency matrix whose elements aij should be equal to 1 if the nodes i, j are
connected through an edge, 或者 0 否则. Such a multidimensional array constitutes
a tensor which is used to represent a population of chromosomes. NEAT is altered in
such a way that every η generations a third order tensor T representing the best p% of
the population is created. The tensor T has to be factorized into its basic factors; 那是,
T = α ◦ β ◦ γ . The values for rate of future mutations of the connections’ weights are
given by the basic frame F = α ◦ β.
Encoding. Tensor-based analysis is used for adaptive calculation of the mutation rates,
while NEAT’s direct encoding of node genes and connection genes is applied for the
reproduction step of the genetic algorithm.
评估. TMO-NEAT is compared to original NEAT using the values of fitness,
number of generations to reach the best value of the fitness and execution time. 关于-
garding execution time, it is found that the adaptive method demands more time than
NEAT but it finds the solution in less generations. 全面的, statistical tests confirm that
TMO-NEAT reaches higher fitness in less generations than NEAT.
A.57 τ -HyperNEAT (2017)
Principles. τ -HyperNEAT (Silva et al., 2017) extends HyperNEAT (Stanley et al., 2009)
(Section A.13) by incorporating the notion of connection delay introduced by τ -NEAT
(Caamaño et al., 2016) (Section A.50). τ -HyperNEAT outputs not only the weight of
the connection between the substrate’s nodes but also the delay τ of this connection.
Similarly to τ -NEAT the delay is implemented through a buffer.
Encoding. The encoding is not described.
评估. τ -HyperNEAT is compared to HyperNEAT (Stanley et al., 2009) (部分
A.13) in terms of quantitative and qualitative measures. Based on the mean and stan-
dard deviation of the fitness function and the distribution of the connection weights,
the two methods do not differ. 然而, τ -HyperNEAT generates more natural and
harmonic gaits.
A.58 EXACT (2017)
Principles. Evolutionary Exploration of Augmenting Convolutional Topologies (EX-
ACT) (Desell, 2017A) evolves the structure of Convolutional Neural Networks (CNNs).
EXACT is a hybrid algorithm which uses GAs to evolve the structure of the CNNs
(in terms of filters’ connectivity and size) and traditional backpropagation to learn the
重量. Using Asynchronous Evolution Strategy, scalability to multiple hosts is en-
abled. 这样, worker hosts communicate with a master process to request genomes
for evaluation (训练) and return them together with their fitness value. 然后, 这
master host puts them back in the population and evolves them.
64
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
EXACT introduces three new mutation operators for changing the size of a node,
那是, the size of the filter, in both x and y dimensions, only in x or only in y dimen-
锡安. 此外, a new “add Node” mutation operator is introduced for inserting a
new node at a random depth together with 1 到 5 edges to previous and subsequent
节点, while its size is set equal to the average of the maximum input node size and
minimum output node size. In contrast to NEAT, EXACT does not perform speciation
and it allows “epigenetic weight initialization” as the weights obtained after the eval-
uation of the initial population can be transferred to their first offsprings to facilitate
training through backpropagation. 最后, EXACT performs coevolution of the hyper-
parameters of the CNNs using the Nelder–Mead method of Simplex Hyperparameter
Optimization (SHO) (Nelder and Mead, 1965).
Encoding. The encoding scheme of EXACT differs from NEAT’s in terms of assigning
an extra innovation marker to the node genes and a field with depth information.
评估. EXACT is compared to its previous version (Desell, 2017乙), which in-
cluded comparison studies against three CNNs with predefined structure; a single and
two layers CNN and a modified LeNET 5 (LeCun et al., 1998). The algorithms are com-
pared based on the training and generalizing and testing errors on the best, worst and
average genomes. The CNNs with structure evolved by EXACT seem to achieve better
training and testing predictions, but no statistical tests were performed. 还, the size of
the evolved CNNs is taken into account, finding that the latest version evolves smaller
CNNs in fewer epochs and with better prediction abilities.
A.59 HA-NEAT (2017)
Principles. Heterogeneous Activation-NEAT (HA-NEAT) (Hagg et al., 2017) extends
NEAT to evolve ANNs with mixed activation functions. It is shown that in order to
approximate a function, more nodes of the same activation function are required com-
pared to nodes using different activation functions. 因此, evolved heterogeneous
networks are expected to be smaller and learn less parameters. In HA-NEAT the “add-
node” mutation operator is altered to introduce a new node in the genome with a ran-
dom activation function from a predefined list including the step, Rectifier Linear Unit
(RELU), sigmoid, and Gaussian functions. 而且, a new mutation operator, 被称为
“mutate activation function,” is introduced to change the activation function of ran-
domly selected node.
Encoding. NEAT’s encoding is altered to include a new field in the node genes indi-
cating the type of nodes’ activation function.
评估. HA-NEAT is compared to NEAT based on the median MSE values (和
他们的 25% 和 75% quantiles), the number of evolved nodes and connections, 和
convergence speed. It is found that HA-NEAT performs as well as the best homoge-
neous NEAT in terms of MSE and convergence speed but it evolves smaller networks.
尽管如此, no statistical test was performed to indicate whether the difference is sig-
nificant or not.
A.60 NEAT-RAC-PGS (2017)
Principles. NEAT with Regular Actor Critic (RAC) for Policy Gradient Search (PGS)
(NEAT-RAC-PGS) (彭等人。, 2017) is a hybrid method for extracting features from
Evolutionary Computation Volume 29, 数字 1
65
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
states in a RL environment and finding good policies that solve the problem effectively.
NEAT-RAC-PGS consists of a population of agents, each consisting of an ANN that
acts as a feature extractor and a RAC model that optimizes the learning of policies us-
ing PGS. The ANN takes as inputs the environmental states, and outputs the features
that are used to compute the value function of each agent optimized by TD. The RAC
algorithm is then used to evaluate the fitness function of each individual. The algorithm
has the advantages of using a population of diverse agents and automatically extract-
ing features while optimizing the policy search process. These features are found to be
reusable in other similar domains.
Encoding. NEAT’s encoding is used.
评估. NEAT-RAC-PGS is evaluated on two RL tasks against NEAT. 使用
features extracted on one task, the RAC algorithm is evaluated against another feature
extraction method with RAC on a similar problem. In both cases, the average number
of steps required to solve the problem are used as performance metrics. NEAT-RAC-
PGS is found successful in automatically extracting reusable features while solving the
problems with better policies.
A.61 NEAT-FLEX (2017)
Principles. NEAT-FLEX (Grisci and Dorn, 2017) is a hybrid method developed for pre-
dicting the conformational flexibility of amino acids. It consists of two independent
脚步: a step of clustering and a step of classification. Hierarchical clustering that does
not require a priori the knowledge of the number of clusters, is used to group protein
data into groups (例如, regular or irregular secondary structure). 然后, NEAT evolves
ANNs that learn to classify the amino acids of a segment and its secondary structure
into the cluster it belongs.
Encoding. NEAT’s encoding is used to represent the weights and the topology of the
ANNs into the genome. To represent the output of the ANNs, one-hot encoding is used.
这意味着, 例如, k classes exist, the output has the format of a k length
string that consists of zeros except for the c position corresponding to class c.
评估. NEAT-FLEX is compared to Multi-layer perceptrons of fixed structure con-
sisting of one hidden layer and five hidden nodes trained with error backpropagation.
The algorithms are compared on the best network resulting of multiple independent
runs in terms of the size of the evolved network and the classification performance.
NEAT finds similar classification rates as MLPs with smaller networks. 此外,
NEAT and MLPs are compared on the angles’ intervals and NEAT is found to deliver
more precise angles than MLPs. 然而, no statistical test is performed to indicate
whether the difference is significant or not.
66
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
Appendix B Datasets and Performance Metrics for Benchmarking
桌子 8: Datasets and performance metrics of x-NEAT methods belonging to cluster 1.
数据集
Performance metrics
Deceptive Landscape
(NoveltyNEAT, FNS-NEATFields, NS-FE-CPPN-NEAT, MAP-Elites CPPN, NEAT-LSTM-IM)
Maze navigation (Lehman and Stanley, 2011A; Inden
Ratio of successful runs (Rawal and Miikkulainen,
等人。, 2013)
2016)
Locomotion of a 3D biped robot (Lehman and
Average number of evaluations (Lehman and
斯坦利, 2011A)
斯坦利, 2011A)
The pole balancing (Inden et al., 2013)
Distinction of 4 visual patterns (Inden et al., 2013)
Distinction of 2 visual patterns with variable
位置 (Inden et al., 2013)
Robot locomotion (Tarapore et al., 2016)
Evolving the morphology and the locomotion of
soft robots (Methenitis et al., 2015)
Sequence classification and recall in T-maze (Rawal
and Miikkulainen, 2016)
Size of networks (Lehman and Stanley, 2011A)
Achieved fitness divided by the number of
几代人 (Inden et al., 2013)
Global Fitness (Tarapore et al., 2016)
Coverage (Tarapore et al., 2016)
Global reliability (Tarapore et al., 2016)
Precision (Tarapore et al., 2016)
Fitness value (Methenitis et al., 2015)
Function approximation problems (Krˇcah, 2012)
Fitness value (Krˇcah, 2012)
Ratio of successful runs (Krˇcah, 2012)
Number of evolved species (Krˇcah, 2012)
Uncertain Landscape (DynNEAT)
Open-Ended Problems
(Coevolutionary NEAT, LAPCA-NEAT, nnrg.hazel, NoveltyNEAT)
Robots’ duel (Stanley and Miikkulainen, 2004)
Pong game (Monroy et al., 2006; 冬天, 2005)
General Game Playing (Reisinger et al., 2007;
Dominance metrics (Stanley and Miikkulainen,
2004; Monroy et al., 2006; Reisinger et al., 2007)
Generation of achieved dominance (Stanley and
Genesereth et al., 2005):
米库莱宁, 2004)
我. connect four
二. chinese checkers
三、. crisscross
四号. blocker
v. two-board tic-tac-toe
2D maze navigation task (Lehman and Stanley,
2011A)
Locomotion of a 3D biped robot (Lehman and
斯坦利, 2011A)
Size of networks (Stanley and Miikkulainen, 2004;
Lehman and Stanley, 2011A)
Average number of wins/ties/losses (Monroy et al.,
2006)
Game’s score (Reisinger et al., 2007)
Memory’s size (Monroy et al., 2006)
Number of generations for which a set of dominated
strategies is undominated (Reisinger et al., 2007)
Average number of evaluations (Lehman and
斯坦利, 2011A)
Multiple Objectives
(MO-NEAT, MM-NEAT)
Communication’s optimization between a sensor
node and a base station (Haggett and Chu, 2009)
Anomaly detection in time series data (Haggett and
Chu, 2009)
Fitness Value (Schrum and Miikkulainen, 2016)
Percentage of True Positives and False Positives
(Haggett and Chu, 2009)
Post-learning score (Schrum and Miikkulainen,
Ms Pac Man (Schrum and Miikkulainen, 2016)
2016)
Percentage of time of mostly used module (Schrum
and Miikkulainen, 2016)
Data specific metrics (Haggett and Chu, 2009):
-Percentage of transmitted packets
Evolutionary Computation Volume 29, 数字 1
67
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
桌子 8: Continued.
数据集
Performance metrics
Irrelevant or Redundant Features
(FS-NEAT, FD-NEAT, IFSE-NEAT, Layered NEAT, Phased NEAT, PFS-NEAT)
Robot Auto Racing Simulator (RARS) (Whiteson et al.,
2005; Tan et al., 2009; Loscalzo et al., 2015; Timin,
1995; Wright et al., 2012)
(2/5) XOR (Tan et al., 2009; 王等人。, 2013)
The concentric spirals (Tan et al., 2009; Potter and Jong,
2000)
The surface plots (Tan et al., 2009)
Marcellus Shale lithofacies prediction (王等人。,
2013)
Lung Nodule classification (Tan et al., 2013)
Double pole balancing (Loscalzo et al., 2015)
Fitness value (Whiteson et al., 2005; Tan et al., 2009;
Wright et al., 2012; 王等人。, 2013; Tan et al., 2013;
Loscalzo et al., 2015)
Number of generations (Whiteson et al., 2005; Tan et al.,
2009)
Computational time (王等人。, 2013)
Size of networks (Whiteson et al., 2005; Tan et al., 2009;
王等人。, 2013; Tan et al., 2013)
Feature selection metrics:
-Frequency of selecting relevant inputs (Tan et al., 2009)
-Sum of absolute weights of input connections (Tan
等人。, 2009)
-Ratio of relevant–irrelevant features (Wright et al.,
2012; Loscalzo et al., 2015)
-Number of selected features (Loscalzo et al., 2015)
Online Evolution (Online NEAT+Q, KO-NEAT, Online NEAT, Online rtNEAT, odNEAT, odNEATv2)
Real Time Evolution (rtNEAT, rtNEATv2, cgNEAT, Online rtNEAT)
The mountain car task (Whiteson and Stone, 2006A;
Uniform Moving Average Score (Whiteson and Stone,
Boyan and Moore, 1995)
2006A)
Server Job Scheduling (Whiteson and Stone, 2006A)
Keepaway Soccer (赵等人。, 2007; Stone et al., 2005)
NERO video game (Stanley et al., 2005; D’Silva et al.,
2005; Stanley et al., 2006)
Galactic Arms Race (Hastings et al., 2009; Games, 2010)
The Open Racing Car Simulator (TORCS) (Whiteson
and Stone, 2006乙; Reeder et al., 2008; Cardamone
等人。, 2010; Stanley et al., 2016)
Multiagent aggregation task (Silva et al., 2015)
Multiagent integrated navigation & obstacle avoidance
(Silva et al., 2015)
Foraging tasks (Silva et al., 2016)
Multiagent Phototaxis task (Silva et al., 2015, 2016)
Utility function (Whiteson and Stone, 2006A; Walsh
等人。, 2004)
Fitness Value (赵等人。, 2007; Silva et al., 2015, 2016)
Number of evaluations (赵等人。, 2007; Silva et al.,
2015)
Size of networks (Silva et al., 2015)
Data specific metrics:
-Subjective metric of user’s perception (Stanley et al.,
2005)
-Users’ statistics (Hastings et al., 2009)
-Remaining distance to the target (D’Silva et al., 2005)
-Portion of successful agents (D’Silva et al., 2005)
-Evolved content (Hastings et al., 2009)
-Average lap time in a car simulator (Cardamone et al.,
2010)
Controllers’ operation time (Silva et al., 2016)
桌子 9: Datasets and performance metrics of x-NEAT methods belonging to cluster 2.
数据集
Performance metrics
Hybrid NE & 血压
(NEAT+Q, Online NEAT+Q, L-NEAT, EXACT, Deep HyperNEAT)
The mountain car task (Whiteson and Stone, 2006A;
Uniform Moving Average Score (Whiteson and Stone,
Boyan and Moore, 1995)
2006A)
Server Job Scheduling (Whiteson and Stone, 2006A)
IRIS flowers classification (Chen and Alahakoon, 2006)
Scale Balance Classification (Chen and Alahakoon,
Utility function (Whiteson and Stone, 2006A; Walsh
等人。, 2004)
Accuracy (Chen and Alahakoon, 2006; Verbancsics and
2006)
Harguess, 2015)
MNIST handwritten digits (Verbancsics and Harguess,
2015; Desell, 2017A; 乐存, 科尔特斯, 等人。, 1998)
BCCT200 ship recognition dataset (Verbancsics and
Harguess, 2015; Rainey and Stastny, 2011)
Fitness Value (Verbancsics and Harguess, 2015)
Error Value (Desell, 2017A)
Number of epochs (Desell, 2017A)
Size of networks (Desell, 2017A)
68
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
桌子 9: Continued.
数据集
Performance metrics
Hybrid NE & EC
(NEAT+Q, Online NEAT+Q, KO-NEAT, NEAR, PIGEON, FNS-NEATFields, NS-FE-CPPN-NEAT,
MAP-Elites CPPN)
Chaser task simulation (Stein et al., 2015)
Sheep task simulation (Stein et al., 2015)
Car task simulation (Stein et al., 2015)
The Mackey–Glass time series (Chatzidimitriou and
Similarity factor (Stein and Gonzalez, 2010; Stein et al.,
2015)
Uniform Moving Average Score (Whiteson and Stone,
2006A)
Mitkas, 2013)
Utility function (Whiteson and Stone, 2006A; Walsh
The multiple superimposed oscillator (MSO)
等人。, 2004)
(Chatzidimitriou and Mitkas, 2013)
Fitness Value (Stein et al., 2015; Methenitis et al., 2015;
The Lorentz attractor time series (Chatzidimitriou and
赵等人。, 2007)
Mitkas, 2013)
Achieved fitness divided by the number of generations
The mountain car task (Chatzidimitriou and Mitkas,
2013; Singh and Sutton, 1996; Whiteson and Stone,
2006A; Boyan and Moore, 1995)
(Inden et al., 2013)
Accumulated reward (Chatzidimitriou and Mitkas,
2013)
The pole balancing (Chatzidimitriou and Mitkas, 2013;
Number of evaluations (Chatzidimitriou and Mitkas,
Inden et al., 2013)
Server Job Scheduling (Chatzidimitriou and Mitkas,
2013; Whiteson and Stone, 2006A)
Keepaway Soccer (赵等人。, 2007; Stone et al., 2005)
Evolving the morphology and the locomotion of soft
robots (Methenitis et al., 2015)
Maze navigation (Inden et al., 2013)
Distinction of 4 visual patterns (Inden et al., 2013)
Distinction of 2 visual patterns with variable position
(Inden et al., 2013)
Robot locomotion (Tarapore et al., 2016)
2013; 赵等人。, 2007)
Error value (Chatzidimitriou and Mitkas, 2013)
Global Fitness (Tarapore et al., 2016)
Coverage (Tarapore et al., 2016)
Global reliability (Tarapore et al., 2016)
Precision (Tarapore et al., 2016)
Hybrid NE & RL
(NEAT+Q, Online NEAT+Q, KO-NEAT, RL-SANE, Online NEAT, Online rtNEAT, NEAR, NEAT-RAC-PGS)
Uniform Moving Average Score (Whiteson and Stone,
The mountain car task (Whiteson and Stone, 2006A;
Wright and Gemelli, 2009; Chatzidimitriou and
Mitkas, 2013; 彭等人。, 2017; Boyan and Moore,
1995)
2006A)
Utility function (Whiteson and Stone, 2006A; Walsh
等人。, 2004)
Server Job Scheduling (Whiteson and Stone, 2006A;
Chatzidimitriou and Mitkas, 2013)
Double inverted pendulum (Wright and Gemelli, 2009;
Fitness value (赵等人。, 2007)
Error value (Chatzidimitriou and Mitkas, 2013)
Number of (时间) 脚步 (Wright and Gemelli, 2009;
Gomez and Miikkulainen, 1999)
彭等人。, 2017)
The Open Racing Car Simulator (TORCS) (斯坦利
Number of Evaluations (Chatzidimitriou and Mitkas,
等人。, 2016; Whiteson and Stone, 2006乙; Reeder et al.,
2008; Cardamone et al., 2010)
Keepaway Soccer (赵等人。, 2007; Stone et al., 2005)
The Mackey–Glass time series (Chatzidimitriou and
Mitkas, 2013)
2013; 赵等人。, 2007)
Accumulated reward (Chatzidimitriou and Mitkas,
2013)
Data specific metrics:
-Average lap time in a car simulator (Cardamone et al.,
The multiple superimposed oscillator (MSO)
2010)
(Chatzidimitriou and Mitkas, 2013)
The Lorentz attractor time series (Chatzidimitriou and
Mitkas, 2013)
The pole balancing (Chatzidimitriou and Mitkas, 2013;
彭等人。, 2017)
Hybrid NE & UL
(NEAT-LSTM-IM, NEAT-FLEX)
Sequence classification and recall in T-maze (Rawal and
米库莱宁, 2016)
Protein Data Bank (Grisci and Dorn, 2017)
Ratio of successful runs (Rawal and Miikkulainen, 2016)
Accuracy (Grisci and Dorn, 2017)
Size of networks (Grisci and Dorn, 2017)
Task-specific metrics (Grisci and Dorn, 2017)
Evolutionary Computation Volume 29, 数字 1
69
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
桌子 10: Datasets and performance metrics of x-NEAT methods belonging to cluster 3.
数据集
Performance metrics
ANNs with different types of nodes
(CPPN-NEAT, NEAT-CTRNN, TL-CPPN-NEAT, RBF-NEAT, Recurrent CPPN-NEAT, EXACT,
SNAP-NEAT, SUPG-HyperNEAT, MAP-Elites CPPN, NEAT-LSTM, NEAT-LSTM-IM, NEAR,
NS-FE-CPPN-NEAT, HA-NEAT)
Pattern generation (斯坦利, 2006)
Pole balancing (Miguel et al., 2008; Kohl and
米库莱宁, 2012; Chatzidimitriou and Mitkas,
2013)
Board game (Bahçeci and Miikkulainen, 2008)
Artificial data with maximal variations (Kohl and
米库莱宁, 2009)
Approximation of the sin(αx) function (Kohl and
米库莱宁, 2009)
Fitness value (Auerbach and Bongard, 2011; Methenitis
等人。, 2015)
Accumulated reward (Chatzidimitriou and Mitkas,
2013)
Number of fitness evaluations (Miguel et al., 2008)
Generalization score (Miguel et al., 2008)
Error value (Hagg et al., 2017)
Generalization metric:
-Ratio of successful runs with different initial
The concentric spirals (Kohl and Miikkulainen, 2009,
状况 (Miguel et al., 2008)
2012; Potter and Jong, 2000)
The multiplexer (Kohl and Miikkulainen, 2009, 2012)
N-Point classification task (Kohl and Miikkulainen,
2012)
Ratio of successful runs (Rawal and Miikkulainen, 2016)
Size of networks (Miguel et al., 2008; Auerbach and
邦加德, 2011; Desell, 2017A; Morse et al., 2013; Hagg
等人。, 2017)
Communication’s optimization between evolution of
robots’ morphology (Auerbach and Bongard, 2011)
Game’s score (Bahçeci and Miikkulainen, 2008)
Number of generations (Bahçeci and Miikkulainen,
MNIST handwritten digits (Desell, 2017A; 乐存,
2008)
科尔特斯, 等人。, 1998)
Number of evaluations (Chatzidimitriou and Mitkas,
Half-field Soccer (Kohl and Miikkulainen, 2012;
2013)
Kalyanakrishnan et al., 2006)
Metric of fracture: variation (Kohl and Miikkulainen,
Quadruped Robot Gait control (Auerbach and
2009)
邦加德, 2011; 史密斯, 2001)
Error Value (Kohl and Miikkulainen, 2009; Desell,
Sequence classification and recall in T-maze (Rawal and
2017A; Chatzidimitriou and Mitkas, 2013)
米库莱宁, 2016)
Server Job Scheduling (Whiteson and Stone, 2006A)
The mountain car task (Chatzidimitriou and Mitkas,
2013; Singh and Sutton, 1996)
Number of epochs (Desell, 2017A)
Data specific metrics:
-Subjective metric of user’s perception (斯坦利, 2006)
-Statistics of the evolved morphologies (Auerbach and
The Mackey–Glass time series (Chatzidimitriou and
邦加德, 2011)
-Data specific scores (Kohl and Miikkulainen, 2012)
-Distance traveled by the robot (Morse et al., 2013;
Methenitis et al., 2015)
Global Fitness (Tarapore et al., 2016)
Coverage (Tarapore et al., 2016)
Global reliability (Tarapore et al., 2016)
Precision (Tarapore et al., 2016)
Mitkas, 2013)
The multiple superimposed oscillator (MSO)
(Chatzidimitriou and Mitkas, 2013)
The Lorentz attractor time series (Chatzidimitriou and
Mitkas, 2013)
Evolving the morphology and the locomotion of soft
robots (Methenitis et al., 2015)
Cholesterol Level Indicators (Hagg et al., 2017; Purdie
等人。, 1992)
Engine Torque and Emissions (Hagg et al., 2017;
Gomez and Miikkulainen, 1998)
Wisconsin Breast Cancer Diagnosis Problem (Hagg
等人。, 2017; Mangasarian and Wolberg, 1990)
Robot locomotion (Tarapore et al., 2016)
ANNs by Automatic Substrate Configuration
(ES-HyperNEAT, ES-HyperNEAT-LEO, Adaptive ES-HyperNEAT, MSS-HyperNEAT)
Retina classification problem (Risi and Stanley, 2012A;
Fitness Value (Risi and Stanley, 2012A, 2012乙; Pugh and
Kashtan and Alon, 2005)
斯坦利, 2013)
Dual Task (navigation and food gathering) (Risi and
Ratio of successful runs (Risi and Stanley, 2012A, 2012乙;
斯坦利, 2012A)
Pugh and Stanley, 2013)
Maze navigation (Risi and Stanley, 2012A, 2012乙)
Multiagent maze exploration and group coordination
Number of generations (Risi and Stanley, 2012A)
Size of networks (Risi and Stanley, 2012A)
任务 (Pugh and Stanley, 2013)
70
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
桌子 10: Continued.
数据集
Performance metrics
Modular ANNs
(Modular NEAT, HyperNEAT-LEO, MFF-NEAT, ES-HyperNEAT-LEO, MM-NEAT, HyperNEAT-CCT,
MB-HyperNEAT)
Artificial board game (Reisinger et al., 2004)
Retina classification problem (Verbancsics and Stanley,
2011; Risi and Stanley, 2012A; Huizinga et al., 2014;
Kashtan and Alon, 2005)
Modularity metric: number of crosslinks (Reisinger
等人。, 2004)
Accuracy (Reisinger et al., 2004; Verbancsics and
斯坦利, 2011)
The Monks problem (Manning and Walsh, 2012; Thrun
Fitness Value (Risi and Stanley, 2012A; Schrum and
等人。, 1991)
Heart disease classification (Manning and Walsh, 2012;
Prechelt and Informatik, 1994)
Mass spectral classification (Manning and Walsh, 2012)
5 independent XOR problems (Huizinga et al., 2014)
2 Hierachically nested XOR problems (Huizinga et al.,
2014)
Ms Pac Man (Schrum and Miikkulainen, 2016)
Team patrol (Schrum et al., 2016)
Lone patrol (Schrum et al., 2016)
Dual Task (Schrum et al., 2016)
Two rooms task (Schrum et al., 2016)
米库莱宁, 2016; Schrum et al., 2016)
Average Error (Manning and Walsh, 2012)
Post-learning score (Schrum and Miikkulainen, 2016)
Number of generations (Reisinger et al., 2004; Risi and
斯坦利, 2012A; Manning and Walsh, 2012)
Percentage of time of mostly used module (Schrum and
米库莱宁, 2016)
Ratio of successful runs (Verbancsics and Stanley, 2011;
Risi and Stanley, 2012A)
Visual interpretation of crosslinks (Verbancsics and
斯坦利, 2011)
Size of networks (Risi and Stanley, 2012A)
Q-score (Huizinga et al., 2014; 纽曼, 2006)
Modularity metrics (Huizinga et al., 2014):
– Modular decomposition
-Number of solved subproblems
Regularity metric (Huizinga et al., 2014)
DNNs
(Deep HyperNEAT, EXACT)
MNIST handwritten digits (Verbancsics and Harguess,
2015; Desell, 2017A; 乐存, 科尔特斯, 等人。, 1998)
BCCT200 ship recognition dataset (Verbancsics and
Harguess, 2015; Rainey and Stastny, 2011)
Accuracy (Verbancsics and Harguess, 2015)
Fitness value (Verbancsics and Harguess, 2015)
Error Value (Desell, 2017A)
Number of epochs (Desell, 2017A)
Size of networks (Desell, 2017A)
Communication’s optimization between a sensor node
and a base station (Haggett and Chu, 2009)
ANNs with Plasticity
(MO-NEAT, Adaptive (ES) HyperNEAT, Adaptive HyperNEATv2, Seeded Adaptive HyperNEAT)
Fitness Value (Risi and Stanley, 2010, 2012乙, 2014)
Game’s score (Gallego-Durán et al., 2013)
Number of generations (Risi and Stanley, 2010, 2014)
Computational time (Gallego-Durán et al., 2013)
Percentage of True Positives and False Positives
Anomaly detection in time series data (Haggett and
Chu, 2009)
T-maze navigation (Risi and Stanley, 2010)
Maze navigation (Risi and Stanley, 2012乙)
The Open Racing Car Simulator (TORCS)
(Gallego-Durán et al., 2013; Stanley et al., 2016)
Line orientation task (Risi and Stanley, 2014)
(Haggett and Chu, 2009)
Ratio of successful runs (Risi and Stanley, 2012乙)
Data specific metrics:
-Percentage of transmitted packets (Haggett and Chu,
2009)
ANNs with Transfer Learning
(TL-CPPN-NEAT, online NEAT, online rtNEAT, PLPS-NEAT-TL)
Board game (Bahçeci and Miikkulainen, 2008)
The Open Racing Car Simulator (TORCS) (Cardamone
等人。, 2010; Stanley et al., 2016)
Fitness value (Hardwick-Smith et al., 2017)
Game’s score (Bahçeci and Miikkulainen, 2008)
Number of generations (Bahçeci and Miikkulainen,
The Mario benchmark (Hardwick-Smith et al., 2017;
2008)
Karakovskiy and Togelius, 2012)
Size of networks (Hardwick-Smith et al., 2017)
Data specific metrics:
-Average lap time in a car simulator (Cardamone et al.,
2010)
Evolutionary Computation Volume 29, 数字 1
71
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
乙. Papavasileiou, J. Cornelis, 和乙. Jansen
桌子 10: Continued.
数据集
Performance metrics
Large ANNs
(Modular NEAT, HyperNEAT, HyperNEAT-LEO, Multiagent HyperNEAT, Adaptive HyperNEAT,
ES-HyperNEAT(-LEO), Adaptive ES-HyperNEAT, Multiagent HyperNEATv2, Switch HybrID,
NEATFields, SUPG-HyperNEAT, MSS-HyperNEAT, FNS-NEATFields, HyperNEAT-CCT,
Seeded (Adaptive) HyperNEAT, MB-HyperNEAT, τ -HyperNEAT, Adaptive HyperNEATv2)
Artificial board game (Reisinger et al., 2004)
Visual Discrimination (Stanley et al., 2009)
Retina classification problem (Verbancsics and
斯坦利, 2011; Huizinga et al., 2014; Risi and
斯坦利, 2012A; Kashtan and Alon, 2005)
Accuracy (Reisinger et al., 2004; Verbancsics and
斯坦利, 2011)
Fitness Value (Risi and Stanley, 2010, 2012A, 2012乙;
Clune et al., 2011; Pugh and Stanley, 2013; Risi and
斯坦利, 2014; Schrum et al., 2016; Silva et al., 2017)
Multiagent predator-prey task (D’Ambrosio and
Achieved fitness divided by the number of
斯坦利, 2008)
T-maze navigation (Risi and Stanley, 2010)
Maze navigation (Risi and Stanley, 2012A, 2012乙;
Inden et al., 2013)
Multiagent patrolling task (D’Ambrosio et al., 2011)
Target weights problem (Clune et al., 2011)
The Bit Mirroring Problem (Clune et al., 2011)
Quadruped Controller (Clune et al., 2011)
Finding the large square (Inden et al., 2012; 高奇
and Stanley, 2007)
Multiagent maze exploration and group
coordination task (Pugh and Stanley, 2013)
几代人 (Inden et al., 2013)
Error Value (Stanley et al., 2009)
Game’s score (Gallego-Durán et al., 2013)
Number of generations (Reisinger et al., 2004; 创新
and Stanley, 2010; Risi and Stanley, 2012A;
D’Ambrosio et al., 2011; Risi and Stanley, 2014)
Number of evaluations (Inden et al., 2012)
Computational Time (Gallego-Durán et al., 2013)
Ratio of successful runs (Verbancsics and Stanley,
2011; Risi and Stanley, 2012乙; Risi and Stanley,
2012A; Inden et al., 2012; Pugh and Stanley, 2013)
Visual interpretation of crosslinks (Verbancsics and
Distinguishing orientations of shapes and textures
斯坦利, 2011)
(Inden et al., 2012)
Distinguishing orientations of area borders in gray
Success of a task (D’Ambrosio et al., 2011)
Networks’ size (Risi and Stanley, 2012A; Morse et al.,
scale images (Inden et al., 2012)
2013)
Evolving coordinated reaching movements for
segmented arms (Inden et al., 2012)
Quadruped Robot Gait control (Morse et al., 2013;
Inden et al., 2013; Silva et al., 2017)
Generalization ability (Inden et al., 2012)
Data specific metric:
-time remaining after the agents have captured all
the preys (D’Ambrosio and Stanley, 2008)
The Open Car Racing Simulator (Gallego-Durán
-distance traveled by robot (Clune et al., 2011; Morse
等人。, 2013; Stanley et al., 2016)
等人。, 2013)
Distinction of 4 visual patterns (Inden et al., 2013)
Distinction of 2 visual patterns with variable
位置 (Inden et al., 2013)
Pole balancing (Inden et al., 2013)
5 independent XOR problems (Huizinga et al., 2014)
2 Hierachically nested XOR problems (惠津加
Generated gaits (Silva et al., 2017)
Q-score (Huizinga et al., 2014; 纽曼, 2006)
Modularity metrics:
-Modular decomposition (Huizinga et al., 2014)
-number of crosslinks (Reisingeret al., 2004)
-Number of solved subproblems (Huizinga et al.,
等人。, 2014)
2014)
Line orientation task (Risi and Stanley, 2014)
Team/Lone patrol (Schrum et al., 2016)
Dual Task (Risi and Stanley, 2012A; Schrum et al.,
2016)
Two rooms task (Schrum et al., 2016)
Regularity metric (Huizinga et al., 2014)
72
Evolutionary Computation Volume 29, 数字 1
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
A Systematic Review of NEAT’s Successors
桌子 10: Continued.
数据集
Performance metrics
ANNs with Memory Capacity
(NEAT-CTRNN, NEAR, NEAT-LSTM, NEAT-LSTM-IM, τ -NEAT, τ -HyperNEAT)
Pole balancing (Miguel et al., 2008; Chatzidimitriou
and Mitkas, 2013)
Fitness value (Silva et al., 2017)
Accumulated reward (Chatzidimitriou and Mitkas,
Sequence classification and recall in T-maze (Rawal
2013)
and Miikkulainen, 2016)
Error value (Chatzidimitriou and Mitkas, 2013;
The Mackey–Glass time series (Chatzidimitriou and
Caamaño et al., 2016)
Mitkas, 2013; Caamaño et al., 2016)
Number of fitness evaluations (Miguel et al., 2008;
The multiple superimposed oscillator (MSO)
Chatzidimitriou and Mitkas, 2013)
(Chatzidimitriou and Mitkas, 2013)
The Lorentz attractor time series (Chatzidimitriou
and Mitkas, 2013)
Generalization score (Miguel et al., 2008):
Generalization metric:
-Ratio of successful runs with different initial
The mountain car task (Chatzidimitriou and
状况 (Miguel et al., 2008)
Mitkas, 2013; Singh and Sutton, 1996)
Ratio of successful runs (Rawal and Miikkulainen,
Server Job Scheduling (Chatzidimitriou and Mitkas,
2016)
2013)
Monthly CO2 concentrations (Caamaño et al., 2016;
Thoning et al., 1989)
Monthly number of international airline passengers
(Caamaño et al., 2016; Box et al., 2015)
Safe Crossing robot task (Caamaño et al., 2016)
Mimicking motion robot task (Caamaño et al., 2016)
Quadruped Gait control (Silva et al., 2017)
Size of networks (Miguel et al., 2008)
Generated gaits (Silva et al., 2017)
我
D
哦
w
n
哦
A
d
e
d
F
r
哦
米
H
t
t
p
:
/
/
d
我
r
e
C
t
.
米
我
t
.
/
/
e
d
你
e
v
C
哦
A
r
t
我
C
e
–
p
d
我
F
/
/
/
/
/
2
9
1
1
1
8
8
8
4
8
6
e
v
C
哦
_
A
_
0
0
2
8
2
p
d
.
F
乙
y
G
你
e
s
t
t
哦
n
0
8
S
e
p
e
米
乙
e
r
2
0
2
3
Evolutionary Computation Volume 29, 数字 1
73