Ryuya Sato*
Department of Modern Mechanical
Engineering
Graduate School of Creative
Science and Engineering
Waseda University, Tokyo, Japan
Mitsuhiro Kamezaki
Research Institute for Science and
Engineering
Waseda University, Tokyo, Japan
Shigeki Sugano
Department of Modern Mechanical
Engineering
School of Creative Science and
Engineering
Waseda University, Tokyo, Japan
Hiroyasu Iwata
Department of Modern Mechanical
Engineering
School of Creative Science and
Engineering
Waseda University, Tokyo, Japan
Presence, Vol. 27, No. 3, Estate 2018, 309–332
https://doi.org/10.1162/PRES_a_00333
A Basic Framework of View
Systems Allowing Teleoperators
to Pre-Acquire Spatial Knowledge
from Survey and Route
Perspectives
Astratto
One of the most important problems in teleoperation of heavy machinery is that the
work efficiency of teleoperation is lower than half that of a typical boarding operation.
This difference is primarily caused by operators’ difficulty in creating mental repre-
sentations (cioè., cognitive maps) of work sites. Operators have two opportunities to
acquire information, namely before work and during work, because the introduction
of teleoperation requires about one week. Therefore, we have developed a view sys-
tem to be used before work to provide environmental information concerning work
sites on the basis of human spatial cognition. Cognitive maps can be built by acquiring
knowledge from two perspectives—the survey perspective and the route perspective.
We display an external view from any viewpoint to acquire knowledge from a survey
perspective and a view from an operator’s viewpoint, which can be modified by the
operator’s intention to acquire knowledge from the route perspective. Experimental
results using a simulator suggested that a proposed view system could help opera-
tors acquire cognitive maps, which may lead to a decrease in task time, the number of
stops, and the moving distance and an increase in speed during grasping.
1
introduzione
Japan has experienced many natural disasters, such as the eruption of
Unzen-Fugendake in 1991 (Nakada & Fujii, 1993) and the Great East-Japan
Earthquake in 2011 (Lay & Kanamori, 2011). After such disasters, teleop-
eration of heavy machinery such as construction equipment has been intro-
duced since secondary disasters such as landslides may occur (Hiramatsu, Aono,
& Nishino, 2002; Kawatsuma, Fukushima, & Okada, 2012; Chayama et al.,
2014). Operators can maneuver heavy machinery in a safe and distant area by
watching several views from cameras in disaster sites. One of the most crucial
problems affecting teleoperation is degradation of work performance. IL
work efficiency of teleoperation is lower than half that of a typical boarding
operation (Moteki, Akihiko, Yuta, Mishima, & Fujino, 2016). This degradation
primarily arises because operators have difficulty creating mental representa-
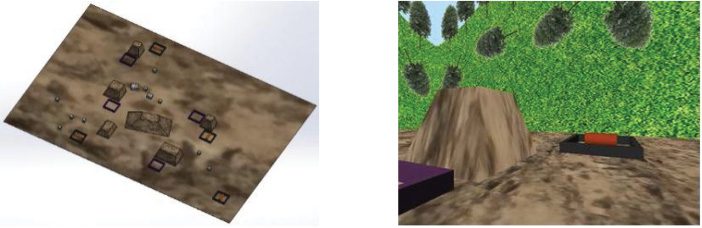
tions of work sites in their mind because of the current view system, come mostrato
in Figure 1 (Asama & Ueki, 2013; Fong, Thorpe, & Baur, 2003). Operators
© 2020 by the Massachusetts Institute of Technology
*Correspondence to ryuya-sato@iwata.mech.waseda.ac.jp.
Sato et al. 309
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
/
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
310 PRESENCE: VOLUME 27, NUMBER 3
Figura 1. Difficulties in creating mental representations of work sites.
need two types of information to create mental repre-
sentations of work sites (Asama & Ueki, 2013). IL
first one is environmental, Per esempio, the locations of
things such as debris or clods (Guarda la figura 1(B), a picture
of a disaster site in the 2016 Kumamoto earthquake).
The second one is the heavy machinery itself, for ex-
ample, the posture of the arms and the orientation of
the equipment during work. In questo articolo, we focus on
mental representations of environment because environ-
mental information is essential for teleoperation.
Operators can hardly plan paths and working strate-
gies without mental representations of work sites be-
cause humans judge based on what they recognize (End-
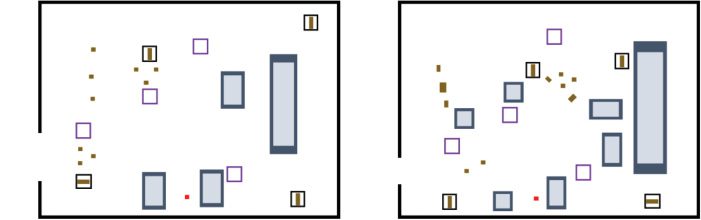
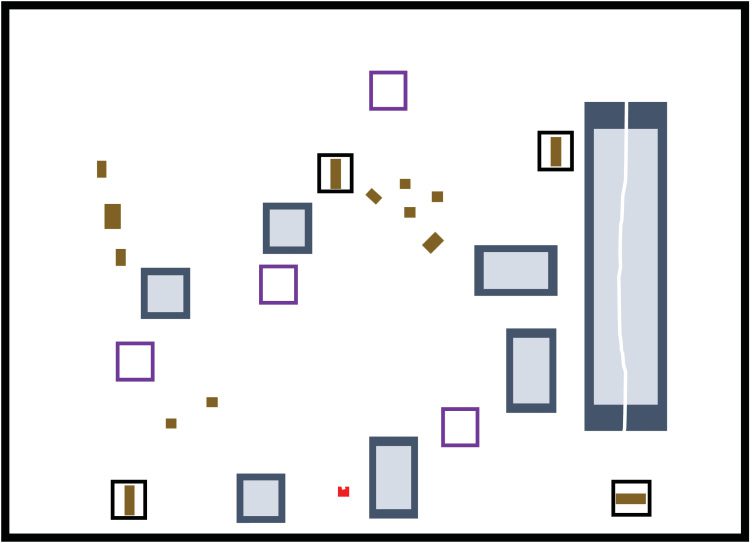
sley, 1995). Per esempio, in the work sites with seven
objects to transport and four obstacles, as illustrated
in Figure 2(UN), operators can choose an oblique path
(black dotted line) without the information concerning
the four diaphanous objects on the right of the figure.
Inoltre, operators may stop to search for objects with-
out their positional information. Inoltre, in the
work site as illustrated Figure 2(B), operators can choose
a roundabout path (black dotted line) without the infor-
mation concerning the distance between the obstacles
(black two-way arrow).
Operators have two opportunities to obtain such in-
formation, namely before work commences (since the
introduction of heavy-machinery teleoperation requires
about a week; Nitta, 2012) and during work. Several
researchers have developed systems to provide such in-
formation during work periods. These include, for ex-
ample, adding displays to increase fields of view (Moteki,
Akihiko, Yuta, Mishima, & Fujino, 2016), providing
an arbitrary view using a drone (Kiribayashi, Yakushi-
gawa, & Nagatani, 2018), and providing views from
various perspectives by automatically changing the ro-
tation and view angle of the cameras (Kamezaki, Yang,
Iwata, & Sugano, 2016). Inoltre, moving map
displays designed to give a sense of robot orientation
(Casner, 2005), gravity-referenced view displays to show
robot attitude (Wang, Lewis, & Hughes, 2004), E
stereoscopic displays to offer depth perception (Draper,
Handel, & Hood, 1991) have been developed outside of
the construction-research field.
Tuttavia, no studies have focused on providing in-
formation before work commences. Lack of environ-
mental information before work causes difficulties in
planning paths and working strategies because opera-
tors tend to do so before work. People can plan only
with information acquired during work (Passini, 1984).
Così, many navigation systems for displaying which
way to go at that moment, including car navigations,
head-up displays (Burnett, 2003), and augmented re-
ality navigation systems (Narzt et al., 2005), have been
sviluppato. Tuttavia, these systems require the answer
paths. Various information including a 3D map at dis-
aster sites, the hardness of the ground, and water con-
tent of the ground is necessary for finding the answer
paths at the disaster sites. Tuttavia, current systems can
hardly acquire all the information, even though some
information such as a 3D map at disaster sites can be
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Sato et al. 311
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
Figura 2. Degradation of work efficiency owing to lack of environmental information.
acquired (Nex & Remondino, 2014). In summary, pre-
vious research including navigation systems can barely
adapt for teleoperation of heavy machinery owing to
difficulties to acquire necessary information for plan-
ning answer paths. Inoltre, planning only with in-
formation acquired during work forces them to plan
and work simultaneously. Humans acquire 70% of their
information from sight (Heilig & Futuro, 1992), E
visual information is the most important among the
five senses for judging and planning (Crundall & E-
derwood, 1998). Therefore, in this study, we develop a
view system to be used in advance of work so as to pro-
vide environmental information; we also analyze the
work-performance and operator-mental-representation
effects of this system. The contribution of the study is
to help operators plan before work by providing prior
environmental information, though previous studies
have focused on providing information during work.
This can increase work efficiency because operators can
focus on operation with enough prior environmental
informazione.
In Section 2, we first introduce human spatial cog-
nition, and then develop a view system based on it and
hypothesize the effects of the proposed system. In Sec-
zione 3, experiments to evaluate the proposed view sys-
tem are conducted, and the results are analyzed in terms
of work efficiency and operator-mental-representation.
In Section 4, we conclude the study and explain future
lavoro.
2 A View System for Providing
Environmental Information Prior to Work
In this section, we develop a view system to pro-
vide environmental information to teleoperators before
work on the basis of human spatial cognition. Primo, we
explain human spatial cognition according to psycholog-
ical knowledge. Prossimo, we assume the effects of acquiring
environmental information for teleoperation. Finalmente, we
develop a view system based on human spatial cognition
and presume the effects of this view system.
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
312 PRESENCE: VOLUME 27, NUMBER 3
Figura 3. Comparison of two perspectives of a cognitive map.
2.1 Human Spatial Cognition
Humans store mental representations known as
cognitive maps (Edoardo, 1948). These maps can be
built by acquiring knowledge from survey and route per-
spectives (Golledge & Stimson, 1997). Humans acquire
survey knowledge from external viewpoints, whereas
route knowledge can be acquired from internal or per-
sonal viewpoints. Così, survey knowledge is usually de-
scribed in absolute coordinates such as east and west,
whereas route knowledge is described in terms of rela-
tive coordinates such as front and back. Inoltre, maps
are usually used to express survey knowledge, whereas
pictures taken from a human viewpoint are usually used
to express route knowledge. Per esempio, the maps illus-
trated in Figure 3(UN) are used for the survey knowledge
and described in terms such as south and north, whereas
the pictures shown in Figure 3(B) come from the route
knowledge and are described in terms of right and left
(Figures 3(UN) E (B) represent the campus of Waseda
Università).
2.2 Assumption of Effects of Acquiring
Cognitive Maps
We assume the effects of acquisition of cognitive
maps upon teleoperation work performance. Operators
can plan general paths with knowledge from the survey
perspective and work strategies in a particular area with
knowledge from the route perspective.
2.2.1 Survey Knowledge. We hypothesize the effects
of acquiring knowledge from the survey perspective in
a work site as illustrated in Figure 2(UN). Operators can
recognize where objects and obstacles are from exter-
nal viewpoints if they acquire knowledge from a survey
perspective. Così, operators can plan and choose the
shortest path such as the green line in Figure 2(UN) E
thus avoid stopping to search.
2.2.2 Route Knowledge. We assume the effects of
acquiring knowledge from route perspective in a work
site as illustrated in Figure 2(B). Operators recognize
the working environment, including distance between
obstacles, as illustrated in Figure 2(B) inside the cab-
ins during a usual boarding operation. Therefore, op-
erators can recognize the distance between obstacles
because route perspective is close to the views opera-
tors watch during a usual boarding operation. Così,
operators can choose the shortest path, such as the green
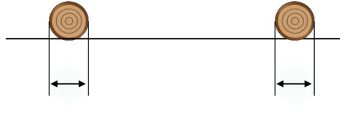
line in Figure 2(B). Inoltre, we hypothesize the ef-
fects in a work site, as illustrated in Figure 4. Operators
must simultaneously work and plan how to grasp the
right and left fallen trees illustrated in Figure 4 without
prior route knowledge. Therefore, the speed of grasping
may be degraded or operators may need to stop to plan
how to grasp the fallen trees. Tuttavia, operators can
finish planning prior to the work if they acquire route
knowledge before work because they recognize envi-
ronments from viewpoints where operators usually are.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
/
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Sato et al. 313
in disaster sites is almost impossible because humans
have a limited memory (Mugnaio, 1956). Così, opera-
tors may prefer to remember important objects, ad esempio
the debris that needs to be transported and the area to
which the debris should be released, to follow planned
paths.
2.3.2 Route Knowledge. This knowledge can be ac-
quired from personal viewpoints. Operators can acquire
it more effectively from active movements which include
modifying views according to their intention, piuttosto che
watching predetermined views (Cadwallader, 1975).
Così, we display a view from an operator’s perspective
that can be modified according to the operators’ in-
tention as shown in Figure 5(B). Cognitive distance,
which is a distance humans recognize, works more effec-
tively in decision making than actual distance (Garling
& Golledge, 1993). Cognitive distance is formed by
various things including human experience (Ankomah,
Crompton, & Baker, 1996). Therefore, we display a
view so that operators can modify this view at the same
speed as heavy machinery moves.
This route-knowledge view can let operators plan
how to work by means of grasping objects. This is be-
cause these views are similar to those that operators
watch when they operate heavy machinery and cab
views during teleoperation. Inoltre, operators prefer
watching cab views from cameras in heavy equipment,
rather than views from cameras around the work site
(Moteki, Fujino, Ohtsuki, & Hashimoto, 2011). Questo
planning can help operators keep working without stops,
speed of the attachment can be faster during grasping,
and moving distance can be decreased as explained in
Subsection 2.2.2.
3
Experiment
We conducted experiments, including grasp-
ing objects and transporting them using a simulator
(Kamezaki, Yang, Iwata, & Sugano, 2014), to evalu-
ate the effects of the proposed view system. The ethics
committee for human research at Waseda University ap-
proved the procedures of the experiments in the study.
Figura 4. Hypothesized effects of acquiring cognitive maps.
Così, operators can maintain a high speed during grasp-
ing and keep working without stopping.
2.3 Development of a View System for
Acquiring Cognitive Maps and
Hypothesis on Effects of a View System
Acquiring cognitive maps can enhance work per-
formance as described in Subsection 2.2. Therefore,
we develop a view system before work to enable opera-
tors to acquire cognitive maps, as illustrated in Figure 5.
Inoltre, we hypothesize the effects of this proposed
view system.
2.3.1 Survey Knowledge. This knowledge can be ac-
quired from external viewpoints. Different viewpoints
that occur before and during work may cause difficulties
in recognizing environments, since mental rotation is
required to match different viewpoints (Levin, Jankovic,
& Palij, 1982). Inoltre, suitable viewpoints differ
between operators (Sato, Kamezaki, Sugano, & Iwata,
2016) and tasks. Così, we display a zoomable view from
an external viewpoint that can be modified by opera-
tors as shown in Figure 5(UN). We display this view in 2D
because teleoperators maneuver by watching 2D views.
This survey-knowledge view can let operators plan
general paths, which allows them to keep working with-
out stops as explained in Subsection 2.2.1. Operators
can remember more objects more accurately from exter-
nal viewpoints, but remembering all positions of objects
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
/
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
314 PRESENCE: VOLUME 27, NUMBER 3
Figura 5. A view system to acquire cognitive maps before work commences.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
3.1 Method
3.1.1 Participants. Sixteen novice operators with no
experience in operating heavy machinery were involved
as participants because there are only about 20 skilled
operators in Japan (Nitta, 2012). Tuttavia, they ac-
quired the skills required to teleoperate heavy machinery
in a simulator through training before the start of the
esperimenti. The participants were all male students,
aged 22 A 25, majoring in mechanical engineering at
Waseda University. The number of participants was de-
termined by using G∗Power (Faul, Erdfelder, Lang,
& Buchner, 2007; Faul, Erdfelder, Buchner, & Lang,
2009). We conducted the pre-experiments, which were
the same procedure as the experiments in this study,
with eight participants who tried the tasks three times.
Four parameters, including the effect size d, α error
prob, power (1-β error prob), and allocation ration
N2/N1, are required to calculate the required sample
size for t-test (statistical test; means: difference between
two independent means (two groups), type of power
analysis; a priori: compute required sample size). Mean
and SD values are required to calculate the effect size d.
The results of mean work time and SD obtained by the
pre-experiments with 24 samples were 282.0 ± 33.2 for
participants watching the proposed prior view systems
E 331.9 ± 65.7 for those watching the conventional
view systems. Così, the effect size d was 0.96. More-
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figura 6. Interface of the developed simulator.
Sopra, we determined α error prob as 0.05, power as 0.8
(Cohen, 1992), and allocation ration N2/N1 as 1 be-
cause of the same sample size. The required total sam-
ple size was 38 based on the calculation. Così, we set
the number of sample size as 48, which means 16 par-
ticipants with three trials, so that it should be over the
required sample size.
3.1.2 Material. Figura 6 shows the interface to con-
trol the heavy machine in the simulator (Kamezaki,
Yang, Iwata, & Sugano, 2014). This simulator
Sato et al. 315
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
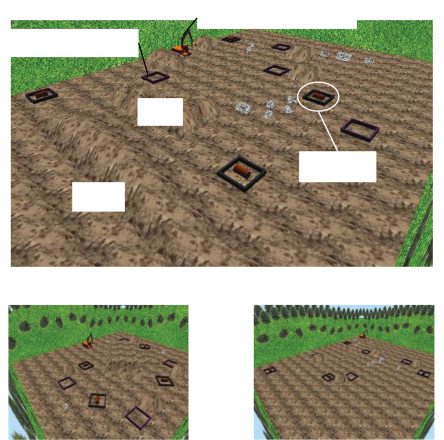
.
Figura 7. Three experimental environments.
calculates physics by ODE and renders by OpenGL.
Details of the simulator are described in a previous paper
(Kamezaki, Yang, Iwata, & Sugano, 2014). We used a
desktop computer (processor: Interl®CoreTMi7-4770
CPU @3.40-GHz, memory: 8.00-GB, OS: Windows
10) for the simulator. We used two joysticks for manipu-
lation (type: S90JBM-YO-21R2G, made by Sakae), E
two levers for crawlers (type: 30JLK-X1-10R1H, made
by Sakae). Participants controlled heavy machinery by
watching a 42-inch monitor. The experimental tasks
included grasping four cylindrical objects and trans-
porting them to release boxes one by one in the three
environments (ambiente 1, ambiente 2, and en-
vironment 3) shown in Figure 7. Figura 8 shows the
drawing of the environment. All environments included
objects, release boxes, clods, stones, and slopes. The par-
ticipants were asked to avoid contacts with clods and
stones.
We displayed the survey-knowledge view by Solid-
Works 2014 because all the participants learned how to
modify the view, including changing the viewpoint and
zoom levels, by using the mouse wheel in the classes.
Participants modified the route-knowledge view by joy-
sticks for crawlers the same as moving the heavy ma-
chine. Così, participants could navigate the environ-
ment as they maneuvered the heavy machine.
We measured cognitive maps using sketch maps in
PowerPoint 2013, which are widely used in the field of
cognitive psychology and geography because they offer
high reliability (Blades, 1990).
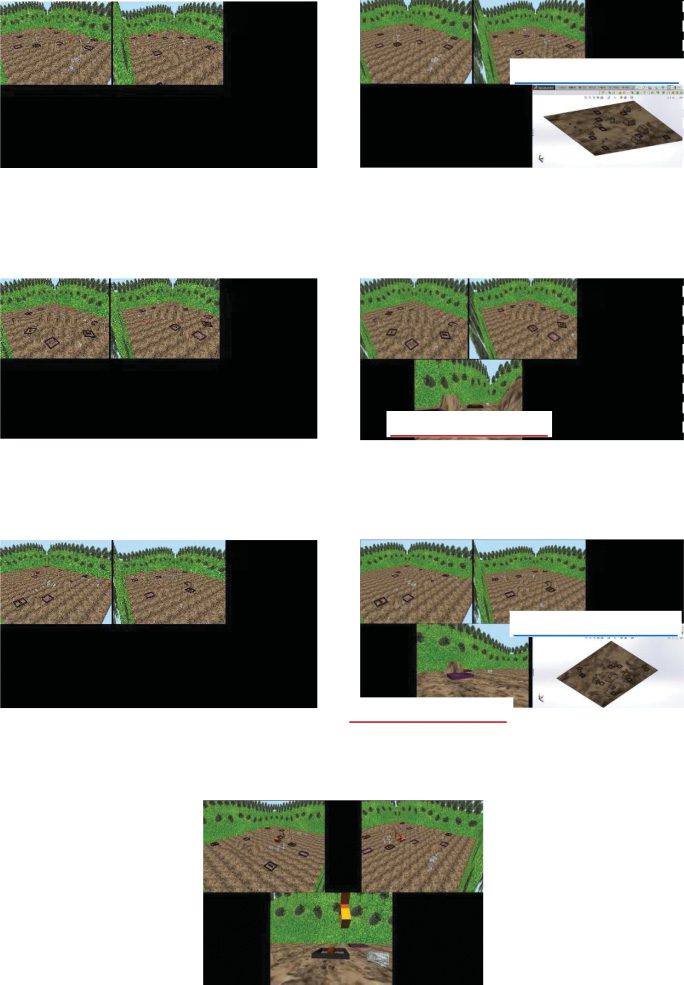
3.1.3 Procedure. Figura 9 shows the experimental
procedure and views displayed before and during tele-
operation work. Primo, all of the participants tried the
training tasks, which includes grasping one object and
transporting it to the designated box, to acquire enough
skills to teleoperate in the environment, as shown in Fig-
ure 10. We used the same conditions as used in previous
research to judge whether participants acquired skills
(Yang, Kamezaki, Sato, Iwata, & Sugano, 2015; Sato
et al., 2019). At first, all the participants tried five tasks.
Then, we decided whether to finish the training tasks.
We first selected the three trials of the last five trials, ex-
cept for the fastest and the slowest ones. Prossimo, we calcu-
lated the percentage of the time difference between the
average work time of the three trials and each work time.
If all the three percentages of time difference were less
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
/
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
316 PRESENCE: VOLUME 27, NUMBER 3
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figura 8. Drawings of three experimental environments.
di 5%, we finished the training tasks. If not, we con-
tinued the training tasks until all the three percentages
were less than 5%.
Prossimo, we divided the sixteen participants into two
groups (Control Group and Knowledge Group) Di
eight participants, such that the average time of training
Sato et al. 317
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
/
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figura 9. Experimental procedure and views displayed before and during work.
318 PRESENCE: VOLUME 27, NUMBER 3
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
/
.
Figura 10. Training task environment.
tasks in each group would be almost the same to eval-
uate the proposed view system. The mean work time
and SD of the selected three trials of Control Group
were 85.7 ± 5.9 S, and those of Knowledge Group were
82.2 ± 14.3 S. No significant differences were observed
between the Control Group and Knowledge Group by
Welch’s t-test t (31) = 1.08, p = .28.
Then, the participants performed three sets of the ex-
perimental tasks with the different view systems before
lavoro. Each experimental task involved watching views
to input environmental information before the start of
teleoperation and then teleoperating heavy machinery.
The participants in the Control Group watched two
fixed external views of all sets before work commenced.
In addition to these external views, the participants in
the Knowledge Group watched a survey-knowledge
view in the first set, a route-knowledge view in the sec-
ond set, and two views to acquire both the survey and
route knowledge in the third set before work. All par-
ticipants teleoperated heavy machinery by watching a
cab view and two fixed external views of all sets dur-
ing work. Each set involved three experimental tasks
for which the participants tried three sets under three
conditions in three different environments. Operators
were asked to prepare for teleoperation by watching
views up to 10 min beforehand. We measured four pa-
rameters during work, questo è, total task time, number
of stops, moving distance, and speed during grasping,
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Sato et al. 319
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
/
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figura 11. Measuring cognitive maps by sketch maps.
and asked the participants to answer interviews as done
in previous research (Lum, Rosen, Lendvay, Sinanan,
& Hannaford, 2009; Korte et al., 2014; Bidwell, Hol-
loway, & Davidoff, 2014.). We define the grasping as the
distance between the root of the end-effector and the
ungrasped target object less than 3 m the same as was
done in previous research (Yang et al., 2015; Kamezaki
et al., 2016).
The participants were asked to sketch maps based on
those in their minds immediately after watching views
before work. The templates for each landmark (objects,
releasing boxes, clods, stones, and slopes) and the frames
of each environment were prepared as shown in Figure
11(UN) (the templates for clods and slopes were the same).
Figura 11(B) shows exemplary sketch maps acquired by
the experiment, and Figure 11(C) shows an example of
an actual map.
We now explain how to analyze the sketch maps. IL
two important aspects of cognitive maps are quantity,
questo è, the number of recognized landmarks, and qual-
ità, questo è, the accuracy of recognized landmarks, be-
cause operators must create mental representations of
work sites, including where things are located. For an-
alytical purposes, we must identify which landmarks in
cognitive maps are recognized and how they correspond
to landmarks in actual maps. Per esempio, we must iden-
tify whether object A in Figure 11(B) is recognized and
which object it corresponds to in Figure 11(C). Some
researchers have analyzed cognitive maps in the fields of
cognitive psychology and geography (Curseu, Schalk, &
Schruijer, 2010; Huynh & Doherty, 2007; Wakabayashi
& Itoh, 1994). Tuttavia, the cognitive maps in these
studies did not include the same landmarks as in this
study because these studies are usually performed in
cities, which have landmarks with specific names, ad esempio
Tokyo Station. Così, no analytical methods can identify
which landmarks in cognitive maps are recognized and
correspond to landmarks in actual maps if maps include
the same landmarks. Therefore, we developed an analyt-
ical method to identify which landmarks are recognized
in cognitive maps and their correspondence with actual
maps.
If the participants draw landmarks randomly, we as-
sume that the probability that they will be drawn close
320 PRESENCE: VOLUME 27, NUMBER 3
Figura 12. Probability that landmarks are drawn in each area in sketch maps.
Figura 13. Histogram of distance between sketch maps and actual maps.
or distant from landmarks on actual maps can be low
and that of being drawn at a middle distance from actual
landmarks can be high because middle area has the most
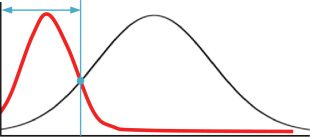
surface area as illustrated in Figure 12. Così, we assume
that the histogram of distance can be Gaussian, like the
black curve shown in Figure 13. D'altra parte, if
the participants recognize landmarks, we assume that
this histogram can obey the red curve shown in Figure
13 because they can draw landmarks close to those in
actual maps. Così, we recognize landmarks in cognitive
maps as actual landmarks if the distance is less than that
of an intersection in a histogram. We calculate the width
of each column of a histogram using the Freedman–
Diaconis rule because this rule is calculated on a quartile
basis. We calculate the distance between the center point
of actual and drawn landmarks. If there are some dupli-
cate landmarks, we need to eliminate them. For exam-
ple, in the case of three stones in the bottom left of Fig-
ure 11(B), we calculate the distances between Stone A
and all the ten stones in the actual maps, and this calcu-
lation is done for Stones B and C as well. If the thresh-
old distance is 3.5, and the distances between stones in
the drawn maps and those in actual maps are as in Ta-
ble 1, then Stones A, B, and C are recognized as both
Tavolo 1. Example of the Results of
Distance
Stone 1
Stone 2
Stone A 2.5
Stone B 1.3
Stone C 2.3
3.4
2.9
3.1
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Stones 1 E 2, which are duplicate landmarks. There-
fore, we need to eliminate those duplicate landmarks to
minimize the total distance. In questo caso, the condition
with Stone B recognized as Stone 1 and Stone C recog-
nized as Stone 2 has the minimum distance. Così, we
recognize Stone B as Stone 1 and Stone C as Stone 2,
and eliminate the others.
3.2 Results and Discussion
In this section, first we explain the results and dis-
cussion for cognitive maps, and after that we explain
them for work efficiency. We verified normal distribu-
tion by the Shapiro–Wilk test for all the analysis using
Welch’s t-test.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
.
/
Sato et al. 321
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figura 14. Results of histogram of the distance between sketch maps and actual maps.
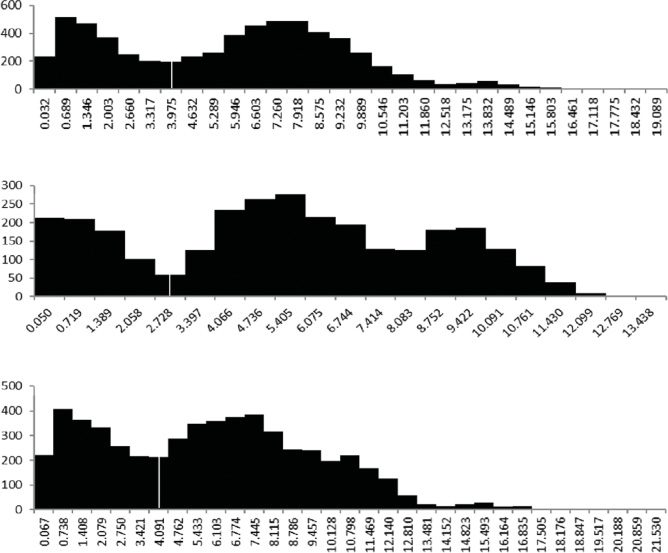
3.2.1 Results on Recognized Landmarks. Figura
14 shows the histogram of distance between all land-
marks in the sketch maps and all the same landmarks in
the actual maps in each set. These histograms have at
least two peaks, and the shape of them is similar to the
one illustrated in Figure 13 that was our hypothesized
histogram. Così, we determined the intersection as the
midpoint of the column of local minimum and set the
distance of the intersection as the threshold.
3.2.2 Effects for Cognitive Maps by Survey Knowl-
edge (First Set). Figura 15 shows the percentage of
recognized landmarks (recognized landmarks/the num-
ber of landmarks in the actual map) and the average er-
ror distance between recognized landmarks and those
in the sketch maps for all same landmarks in the first
set. The Mann–Whitney U test indicates that partic-
ipants in the Control Group recognized more stones
U = 177, p = .02 than those in the Knowledge Group
significantly, and a marginally significant difference is ob-
served between total of each group U = 203.5, p = .08.
Inoltre, Welch’s t-test indicates that participants in
the Knowledge Group recognized release box t (180)
= 2.26, p = .02, slopes t (39) = 2.55, p = .01, and to-
tal t (889) = 2.55, p = .01 more accurately than those
in the Control Group, and a marginally significant dif-
ference is observed between the average distances in
the clods t (204) = 1.89, p = .06 of the Control and
Knowledge Groups. These results suggest that watching
a survey-knowledge view before work can help operators
remember environments accurately, but it cannot input
environmental information in terms of quantity.
We now discuss two points, which are (1) the reason
why percentage of recognized landmarks in the Control
Group was higher than that in the Knowledge Group,
(2) the reason why the average error distance of objects
and stones was not improved significantly.
322 PRESENCE: VOLUME 27, NUMBER 3
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figura 15. Results of sketch maps for the first set (survey knowledge).
Percentage of recognized landmarks in Control Group
was higher than that in Knowledge Group: This could
be caused because participants in the Control Group
tried to remember all the landmarks; even though those
in the Knowledge Group tried to remember impor-
tant landmarks. Stones are not as important as ob-
jects or releasing boxes for path planning because they
are small obstacles. Figura 16 shows the actual map
and the shortest path of all the trials (black line) in the
ambiente 1. Stones 1 E 2 are close to the short-
est path and Stones 3 A 10 are far from the shortest
sentiero. Figura 17 shows the percentage of recognized
Stones 1 E 2, E 3 A 10. The Mann–Whitney U
test indicates that no significant differences are ob-
served between the Knowledge Group and the Con-
trol Group in Stones 1 E 2, U = 263, p = .47, Ma
a significant difference is observed in Stones 3 A 10,
U = 172.5, p = .01. Inoltre, “clod 4” is far from
the shortest path as shown in Figure 16, and the Mann–
Whitney U test indicates that a significant difference
between the recognized percentage of each group,
U = 192, p = .02. Inoltre, participants in the
Knowledge Group recognized almost all of landmarks
close to the shortest path such as objects, release boxes,
and slopes, as shown in Figure 16, though those in
the Control Group recognized unimportant land-
marks including Stones 3 A 10, as shown in Figure
11(UN) E 17. This difference could lead the Knowl-
edge Group to recognize more accurately, as shown in
Figura 11(B).
Average error distance of objects and stones were not
improved significantly: This could be caused by the im-
portance of the landmarks. Objects could be the most
important landmark in this experiment because the task
included grasping objects. All of the participants tried
to remember objects from the interview. On the other
hand, stones are not so important, as explained in this
section. All the participants tried to remember stones
with little effort from the interview. Those results sug-
gest that the average error distance of objects and stones
were not improved significantly because of the impor-
tance of landmarks.
These results suggest that watching a survey-
knowledge view can help operators remember important
Sato et al. 323
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
P
v
UN
R
/
UN
R
T
io
C
e
–
P
D
l
F
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
P
R
e
S
_
UN
_
0
0
3
3
3
P
D
.
/
Figura 16. The actual map and the shortest path of all trials in the environment 1.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figura 17. Percentage of recognized Stones 1 E 2, E 3 A 10.
landmarks accurately because of improvement in accu-
racy, as shown in Figure 11(B) and recognizing only
important landmarks, as shown in Figures 11(UN) E 17.
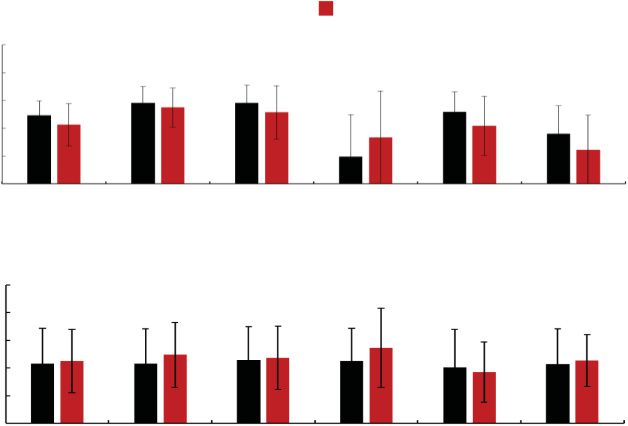
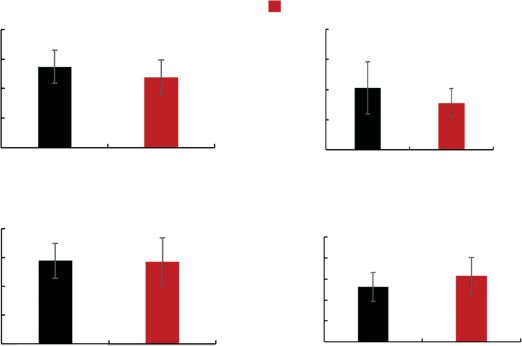
3.2.3 Effects for Cognitive Maps by Route Knowl-
edge (Second Set). Figura 18 shows the percentage
of recognized landmarks and the average error dis-
tance between recognized landmarks and those in the
sketch maps for all same landmarks in the second set.
The Mann–Whitney U test indicates that participants in
the Control Group recognized more stones, U = 202,
p = .07, and total, U = 206, p = .09, than those in the
Knowledge Group, by a marginally significant num-
ber. Welch’s t-test indicates that a marginally signif-
icant difference was observed in objects, T (161) =
1.68, p = .10. These results suggest that watching a
324 PRESENCE: VOLUME 27, NUMBER 3
Figura 18. Results of sketch maps for the second set (route knowledge).
route-knowledge view before work cannot input en-
vironmental information in terms of both quality and
quantity. We will discuss this with results on work effi-
ciency in Subsection 3.2.6.
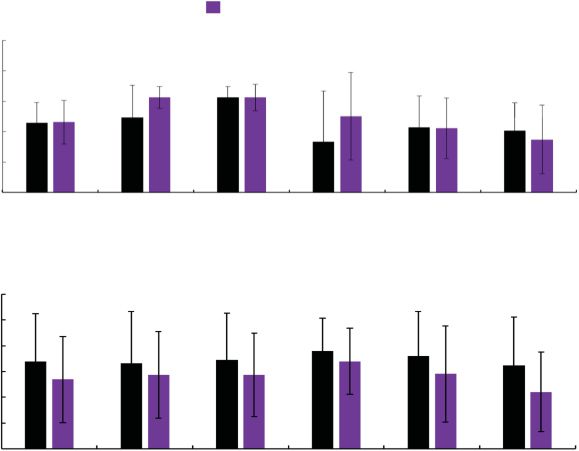
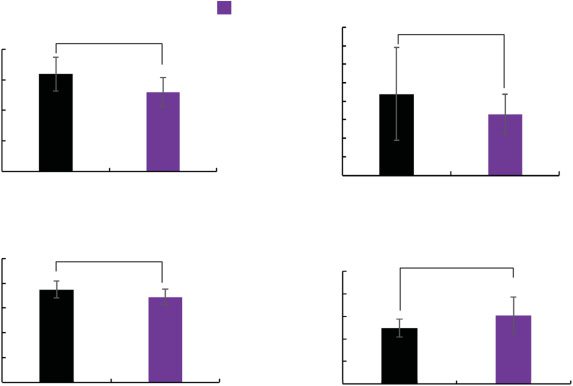
3.2.4 Effects for Cognitive Maps by Survey and
Route Knowledge (Third Set). Figura 19 shows
the percentage of recognized landmarks and the aver-
age distance between recognized and actual landmarks
in the third set. The Mann–Whitney U test indicates
that participants in the Knowledge Group recognized
significantly more objects, U = 201, p = .04, di
those in the Control Group, and a marginally signif-
icant difference was observed in slopes, U = 216,
p = .08. Welch’s t-test indicates that participants in the
Knowledge Group recognized release boxes, T (176) =
2.24, p = .03, clods, T (153) = 2.41, p = .02, stones,
T (269) = 4.99, P < .001, and total, t (793) = 5.65, p <
.001, more accurately than those in the Control Group.
These results suggest that watching a survey-knowledge
view and a route-knowledge view before work can in-
put environmental information in terms of both quality
and quantity. These results are different from results
explained in Subsections 3.3.2 and 3.3.3, and we will
address this further. This difference in results could be
caused because the participants in the Control Group
could not remember environment 3 as well as environ-
ment 1. Environment 1 has 4 objects, 4 release boxes,
1 slope, 6 clods, and 10 stones, and environment 3
has 4 objects, 4 release boxes, 1 slope, 5 clods, and 10
stones. Thus, the only difference is that environment
3 has 1 less clod than environment 1. However, the
participants in the Control Group recognized about
81% in the first set (environment 1), but they recog-
nized about 70% in the third set (environment 3). The
Mann–Whitney U test indicates that this difference is
significant, U = 174.5, p = .02. Moreover, objects are
important landmarks because the task requires partici-
pants to grasp the objects. However, the participants in
the Control Group remembered only 74%. These results
indicate that a view to acquire knowledge from the sur-
vey perspective can help operators recognize important
landmarks stably, even for different environments.
3.2.5 Effects for Work Efficiency by Survey Knowl-
edge (First Set). Figure 20 shows (a) the task time,
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
v
a
r
/
a
r
t
i
c
e
-
p
d
l
f
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
p
r
e
s
_
a
_
0
0
3
3
3
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Sato et al. 325
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
v
a
r
/
a
r
t
i
c
e
-
p
d
l
f
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
p
r
e
s
_
a
_
0
0
3
3
3
p
d
/
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Figure 19. Results of sketch maps for the third set (both knowledge).
Figure 20. Results of the first set (survey knowledge).
326 PRESENCE: VOLUME 27, NUMBER 3
Figure 21. Results of the second set (route knowledge).
(b) the number of stops, (c) the moving distance, and
(d) the speed during grasping for the first set. Welch’s
t-test indicates that the task time t (40) = 3.22, p =
.003, the number of stops t (33) = 2.26, p = .03 and
moving distance t (43) = 210, p = .04 in the Knowl-
edge Group are significantly less than those in the
Control Group and that the speed during grasping
t (44) = 2.23, p = .03 in the Knowledge Group is
significantly faster than that in the Control Group.
These results suggest that watching a survey-knowledge
view before work can decrease the task time the mov-
ing distance, and the number of stops. Moreover, the
Knowledge Group remembered more accurately than
in the Control Group significantly, and the Knowledge
Group focused on remembering only important land-
marks, as explained in Subsection 3.2.1. Thus, those
results suggest that watching a survey-knowledge view
before work can help operators plan short paths and fo-
cus on remembering landmarks close to the short paths.
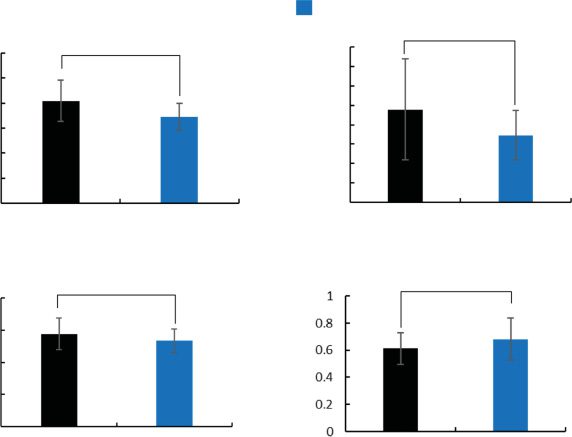
3.2.6 Effects for Work Efficiency by Route Knowl-
edge (Second Set). Figure 21 shows (a) the task time,
(b) the number of stops, (c) the moving distance, and
(d) the speed during grasping for the second set. Welch’s
t-test indicates that the task time t (46) = 2.12, p = .04,
and the number of stops t (36) = 2.50, p = .02, for the
Knowledge Group were significantly less than that in
the Control Group and that the speed during grasping
t (44) = 2.37, p = .02, in the Knowledge Group is sig-
nificantly faster than that in the Control Group These
results suggest that watching a route-knowledge view
can decrease task time and the number of stops and in-
crease speed during grasping.
3.2.7 Effects for Work Efficiency by Survey and
Route Knowledge (Third Set). Figure 22 shows
(a) the task time, (b) the number of stops, (c) the
moving distance, and (d) the speed during grasping
for the third set. Welch’s t-test indicates that the task
time t (45) = 4.04, p < .001, and the moving distance
t (46) = 3.25, p = .002, in the Knowledge Group are
significantly less than those in the Control Group and a
marginally significant difference is observed between the
number of stops t (31) = 1.98, p = .06, in the Knowl-
edge Group and that in the Control Group. More-
over, Welch’s t-test indicates that speed during grasping
t (34) = 3.00, p = .005, in the Knowledge Group is sig-
nificantly faster than that in the Control Group These
results suggest that watching a survey-knowledge view
and route-knowledge view before work can decrease task
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
v
a
r
/
a
r
t
i
c
e
-
p
d
l
f
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
p
r
e
s
_
a
_
0
0
3
3
3
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Sato et al. 327
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
Figure 22. Results of the third set (both knowledge).
Table 2. Summary of the Results from each Knowledge (
√
: p < 0.05, ✗: p (cid:2) 0.05)
Survey knowledge
Route knowledge
Both knowledge
Task time The number of stops Moving distance
√
√
√
√
√
✗
√
√
✗
Speed during grasping
√
√
√
time, moving distance, and the number of stops, and
increase speed during grasping.
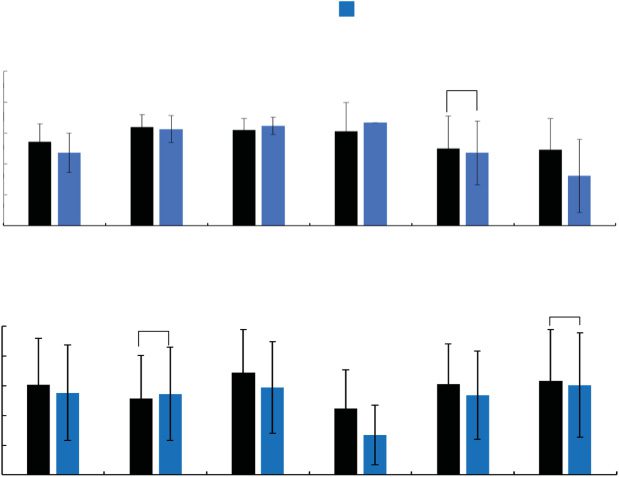
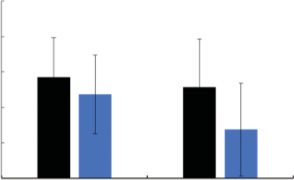
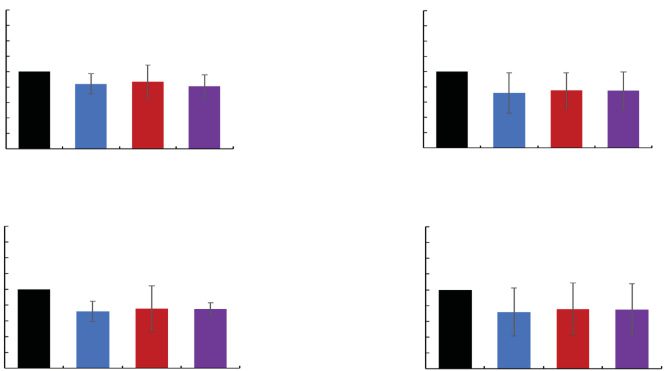
3.2.8 Discussion on Work Efficiency. We summarize
the effects of the proposed view system in Table 2 and
Figure 23. Table 2 shows whether differences between
Contol Group and Knowledge Group are significant.
Figure 23 shows the normalized results of each set. The
standard deviation bars of the Control Group were also
normalized, so each result has three standard deviation
bars because each result and standard deviation ratio
is different from each set. For example, the blue stan-
dard deviation bars of the task time is normalized by
dividing standard deviation of the first set by the average
task time of that set. The task time, the number of stops,
the moving distance, and the speed during grasping can
be improved with survey knowledge Moreover, the task
time, the number of stops, and the speed during grasp-
ing can be improved with route knowledge. The task
time, the moving distance, and the speed during grasp-
ing can be improved with survey and route knowledge.
Thus, we discuss the following four points.
Improvement of speed during grasping with survey
perspective: This could be caused by the positions dur-
ing grasping. Grasping objects from slanting positions,
which means the angle between the object and the heavy
machine θ is small, can increase the number of stops ow-
ing to difficulties in grasping, as illustrated in Figure 24.
Allowable error to grasp the object is (WGsinθ − WO),
when the width of grapples is WG and the width of
the object is WO. Thus, the more parallel to the ob-
ject, the more difficult grasping the objects is, which
can increase the number of stops. Figure 25 shows the
/
e
d
u
p
v
a
r
/
a
r
t
i
c
e
-
p
d
l
f
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
p
r
e
s
_
a
_
0
0
3
3
3
p
d
/
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
328 PRESENCE: VOLUME 27, NUMBER 3
Figure 23. Summary of the normalized results.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
v
a
r
/
a
r
t
i
c
e
-
p
d
l
f
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
p
r
e
s
_
a
_
0
0
3
3
3
p
d
/
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Figure 24. Difficulties in grasping from slanting positions.
results of the number of stops during grasping the cir-
cled object in Figure 7(a). Welch’s t-test indicates that
the number of stops, t (29) = 2.17, p = .04, for the
Knowledge Group is significantly less than that in the
Control Group. Moreover, the number of trials with
θ < 60◦ in the Control Group was 5, but the one in
the Knowledge Group was 0. These results suggest that
watching a survey-knowledge view before work can help
Sato et al. 329
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
Figure 25. Results of the number of stops during grasping the circled object in 7a.
/
e
d
u
p
v
a
r
/
a
r
t
i
c
e
-
p
d
l
f
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
p
r
e
s
_
a
_
0
0
3
3
3
p
d
.
/
Figure 26. Comparison of the shortest path and the path taken by participants.
operators grasp objects from places where θ is large and
prevent workers from stopping, which may cause the
improvement of speed during grasping.
Unimprovement of moving distance with route perspec-
tive: This could be caused because participants could
hardly recognize the relationship between the heavy
machines and distance between obstacles. Figure 26
shows the shortest path (the green line) and the path
participants in the Knowledge Group took (the white
line) in the second set. Participants recognized the
distance between obstacles circled in Figure 26 from
the interview, even though they took the longer path
(the white line). This was because they could not rec-
ognize the relationship between the heavy machines
and the distance between obstacles. That could be the
reason why the moving distance was not decreased
significantly.
Improvement of the task time, the number of stops, and
speed during grasping without improvement of cognitive
maps by watching a route-knowledge view: This could be
caused because participants in the Knowledge Group
tried to remember the working strategies, including
how to grasp objects, rather than remembering the en-
vironment. The shortest path in environment 2 was just
clockwise and there were a few obstacles, so environ-
ment 2 was not so complicated, as shown in Figure 26.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
330 PRESENCE: VOLUME 27, NUMBER 3
Figure 27. Results of the stop time in the third set.
Participants in the Knowledge Group focused on plan-
ning the working strategies from the interview. These re-
sults suggest that participants in the Knowledge Group
could try to focus on planning rather than remember-
ing the environment because the environment was not
so complicated. This could be why watching a route-
knowledge view before work could not input envi-
ronmental information in terms of both quality and
quantity. These results suggest that watching a route-
knowledge view can help operators plan working strate-
gies, which may lead to reducing the task time, the num-
ber of stops, and increasing speed during grasping.
Here, we discuss the effects of a route-knowledge
view for complicated environments. Remembering the
environment from a route-knowledge view can be more
difficult than a survey-knowledge view, especially for
complicated environments. Thus, we assume that opera-
tors can focus on planning rather than remembering the
complicated environment.
Unimprovement of the number of stops with survey and
route perspective: We discuss the point that the number
of stops was improved with each knowledge, but not
improved with knowledge of both. Figure 27 shows the
results of the stop time in the third set. Welch’s t-test
indicates that the stop time in the Knowledge Group
is significantly smaller than that in Control Group,
t (42) = 2.10, p = .04. Thus, the proposed view system
could improve the stop time, though it might not be
able to improve the number of stops. Therefore, these
results suggested that the proposed view system could
improve the stop time.
3.2.9 Discussion on Practical Use. We now discuss
how to apply the proposed view system for practical
use because the system was developed in the simula-
tor. First, we need a 3D map of a disaster site for this
system. This 3D map can be acquired by using drones
(Nex & Remondino, 2014; Spranger, Heinke, Becker,
& Labudde, 2016). Then, both a survey-knowledge
view and a route-knowledge view can be displayed by us-
ing common 3D computer graphic software, including
Blender and Unity.
4
Conclusion
We developed a view system based on human spa-
tial cognition to provide teleoperators with environmen-
tal information prior to commencement of work. We
displayed two views, an external view from any view-
point to show survey knowledge and another from an
operator’s viewpoint, representing the route knowledge,
which could be modified based on the operator’s intent.
We conducted experiments using a simulator to evalu-
ate a proposed view system. The results suggest that this
system can increase work efficiency and help operators
plan paths. The results showed that the task time, mov-
ing distance, and number of stops could be reduced by
watching the survey-knowledge view. Furthermore, the
task time, stops, and speed degradation during grasp-
ing could be prevented by watching a route-knowledge
view. From the analysis of cognitive maps, the survey-
knowledge view was found to help operators remember
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
v
a
r
/
a
r
t
i
c
e
-
p
d
l
f
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
p
r
e
s
_
a
_
0
0
3
3
3
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Sato et al. 331
important landmarks stably, which might lead to reduc-
ing task time, preventing stops, and choosing shorter
paths. Moreover, the route-knowledge view could help
operators plan their work, possibly allowing them to pre-
vent stops and speed degradation during grasping.
We will consider providing the proposed view sys-
tem in 3D because views during work can be 3D in the
future, with an interface to modify the viewpoint. In fu-
ture work, we hope to analyze cognitive maps in terms
of other factors, such as the dimensions and rotation of
landmarks. Moreover, we will examine the effects of a
route-knowledge view for complicated environments.
Furthermore, we will develop systems to provide envi-
ronmental information in case the environment changes,
including head-mounted and other immersive displays.
Acknowledgments
This research was supported by JSPS KAKENHI;
under grant numbers 26870656 and 16K06196, Casio
Science Promotion Foundation, and the Research Insti-
tute for Science and Engineering, Waseda University.
References
Ankomah, P., Crompton, J.& Baker, D. (1996). Influence
of cognitive distance in vacation choice. Annals of Tourism
Research, 23(1), 138–150.
Asama, H., & Ueki, C. (2013). A proposal for unmanned con-
struction. Council on Competitiveness-Nippon. Japanese.
URL Retrieved from http://www.cocn.jp/report
/thema50-L2.pdf , accessed on 10/23/2019
Bidwell, J., Holloway, A., & Davidoff, S. (2014). Measur-
ing operator anticipatory inputs in response to time-delay
for teleoperated human-robot interfaces. Proceedings of the
SIGCHI Conference on Human Factors in Computing Sys-
tems, 1467–1470.
Cadwallader, M. (1975). A behavioral model of consumer
spatial decision making. Journal of Economic Geography,
51(4), 339–349.
Casner, S. (2005). The effect of GPS and moving map displays
on navigational awareness while flying under VFR. Journal
of Applied Aviation Studied, 5(1), 153–165.
Chayama, K., Fujioka, A., Kawashima, K., Yamamoto, H.,
Nitta, Y., et al. (2014). Technology of unmanned construc-
tion system in Japan. Journal of Robotics and Mechatronics,
26(4), 403–417.
Cohen, J. (1992). A power primer. Psychological Bulletin, 112,
155–159.
Crundall, D., & Underwood, G. (1998). Effects of experience
and processing demands on visual information acquisition in
drivers. Ergonomics, 41(4), 448–458.
Curseu, P., Schalk, R., & Schruijer, S. (2010). The use of cog-
nitive mapping in eliciting and evaluation group cognitions.
Journal of Applied Social Psychology, 40(5), 1258–1291.
Draper, J., Handel, S., & Hood, C. (1991). Three experiments
with stereoscopic television: When it works and why. Pro-
ceedings of the IEEE International Conference on Systems,
Man, and Cybernetics, 1047–1052.
Edward, T. (1948). Cognitive maps in rats and men. Psycholog-
ical Review, 55(4), 189–208.
Endsley, M. (1995). Toward a theory of situation awareness in
dynamic systems. Human Factors, 37(1), 32–64.
Faul, F., Erdfelder, E., Buchner, A., & Lang, A.-G. (2009).
Statistical power analyses using G∗Power 3.1: Tests for cor-
relation and regression analyses. Behavior Research Methods,
41, 1149–1160.
Faul, F., Erdfelder, E., Lang, A.-G., & Buchner, A. (2007).
G∗Power 3: A flexible statistical power analysis program
for the social, behavioral, and biomedical sciences. Behavior
Research Methods, 39, 175–191.
Fong, T., Thorpe, C., & Baur, C. (2003). Multi-robot remote
driving with collaborative control. IEEE Transactions on
Industrial Electronics, 50(4), 699–704.
Garling, T., & Golledge, R. (1993). Behavior and environ-
ment: Psychological and geographical approaches. Amsterdam:
North Holland.
Blades, M. (1990). The reliability of data collected from sketch
Golledge, R., & Stimson, R. (1997). Spatial behavior: A geo-
maps. Journal of Environmental Psychology, 10(4), 327–
339.
Burnett, G. (2003). A road-based evaluation of a head-up
display for presenting navigation information. Proceedings of
International Conference on Human–Computer Interaction,
3, 180–184.
graphic perspective. New York: Guilford Press.
Heiling, M., & Futuro, R. (1992) The cinema of the future.
Presence: Teleoperators and Virtual Environments 1(3), 279–
294.
Hiramatsu, Y., Aono, T., & Nishino, M. (2002). Disaster
restoration work for the eruption of Mt Usuzan using an
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
v
a
r
/
a
r
t
i
c
e
-
p
d
l
f
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
p
r
e
s
_
a
_
0
0
3
3
3
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
332 PRESENCE: VOLUME 27, NUMBER 3
unmanned construction system. Advanced Robotics, 16(6),
505–508.
Symposium Automation and Robotics in Construction, 532–
537.
Huynh, N., & Doherty, S. (2007). Digital sketch-map draw-
ing as an instrument to collect data about spatial cogni-
tion.Cartographica, 42(4), 285–296.
Kamezaki, M., Yang, J., Iwata, H., & Sugano, S. (2014). A
basic framework of virtual reality simulator for advancing
disaster response work using tele-operated work machines.
Journal of Robotics and Mechatronics, 26(4), 486–495.
Kamezaki, M., Yang, J., Iwata, H., & Sugano, S. (2016). Visi-
bility enhancement using autonomous multicamera controls
with situational role assignment for teleoperated work ma-
chines. Journal of Field Robotics, 33(6), 802–824.
Kawatsuma, S., Fukushima, M., & Okada, T. (2012). Emer-
gency response by robots to Fukushima-Daiichi accident:
Summary and lessons learned. Industrial Robot, 39(5), 428–
435.
Kiribayashi, S., Yakushigawa, K., & Nagatani, K. (2018). De-
sign and development of tether-powered multirotor micro
unmanned aerial vehicle system for remote-controlled con-
struction machine. Field and Service Robotics, 5, 637–648.
Korte, C., Nair, SS., Nistor, V., Low, TP., Doarn, CR., &
Schaffner, G. (2014). Determining the threshold of time-
delay for teleoperation accuracy and efficiency in relation to
telesurgery.Telemedicine and e-Health, 20(12), 1076–1086.
Lay, T., & Kanamori, H. (2011). Insights from the great 2011
Japan earthquake. Physics Today, 64(12), 33–39.
Levin, M., Jankovic, I., & Palij, M. (1982). Principles of spa-
tial problem solving. Journal of Experimental Psychology:
General, 111(2), 157–175.
Lum, L., Rosen, J., Lendvay, T., Sinanan, M., & Hannaford,
B. (2009). Effect of time delay on telesurgical performance.
IEEE International Conference on Robotics and Automa-
tion, 4246–4252.
Miller, G. (1956). The magical number seven, plus or minus
two: Some limits on our capacity for processing informa-
tion.Psychological Review, 63(2), 81–97.
Moteki, M., Akihiko, N., Yuta, S., Mishima, H., & Fujino,
K. (2016). Research on improving work efficiency of un-
manned construction. Proceedings of the 33rd International
Symposium on Automation and Robotics in Construction,
478–486.
Moteki, M., Fujino, K., Ohtsuki, T., & Hashimoto, T. (2011).
Research on visual point of operator in remote control of
construction machinery. Proceedings of the International
Nakada, S., & Fujii, T. (1993). Preliminary report on the activ-
ity at Unzen Volcano (Japan), November 1990–November
1991: Dacite lava domes and pyroclastic flows. Journal of
Volcanology and Geothermal Research, 54(3–4), 319–333.
Narzt, W., Pomberger, G., Ferscha, A., Kolb, D., Muller, R.,
et al. (2005). Universal Access in the Information Society,
4(3), 177–187.
Nex, F., & Remondino, F. (2014). UAV for 3D mapping ap-
plications: A review. Applied Geomatics, 6(1), 1–15.
Nitta, Y. (2012). Evolution of unmanned construction system
playing important role in the disaster recovery. Civil Engi-
neering, 67(4), 16–23. Japanese.
Passini, R. (1984). Spatial representations, a wayfinding per-
spective. Journal of Environmental Psychology, 4(2), 153–
164.
Sato, R., Kamezaki, M., Sugano, S., & Iwata, H. (2016). Gaze
pattern analysis in multi-display systems for teleoperated
disaster response robots. Proceedings of the IEEE Interna-
tional Conference on Systems, Man, and Cybernetics, 3534–
3539.
Sato, R., Kamezaki, M., Yamada, M., Hashimoto, T., Sug-
ano, S., & Iwata, H. (2019). Experimental investigation
of optimum and allowable range of side views for teleoper-
ated digging and release works by using actual construction
machinery. Proceedings of the IEEE/SICE International Sym-
posium on System Integration, 788–793.
Spranger, M., Heinke, F., Becker, S., & Labudde, D. (2016).
Towards drone-assisted large-scale disaster response and
recovery. Proceedings of International Conference on Ad-
vances in Computation, Communication and Services, 5–
10.
Wakabayashi, Y., & Itoh, S. (1994). Reexamination of the
components of distortions in cognitive maps. Journal of
Geography, 103(3), 221–232.
Wang, J., Lewis, M., & Hughes, S. (2004). Gravity-referenced
attitude display for teleoperation of mobile robots. Pro-
ceedings of the Human Factors and Ergonomics Society 48th
Annual Meeting, 2662–2666.
Yang, J., Kamezaki, M., Sato, R., Iwata, H., Sugano, S.
(2015). Inducement of visual attention using augmented
reality for multi-display systems in advanced tele-operation.
Proceedings of the IEEE/RSJ International Conference on
Intelligent Robots and Systems, 5364–5369.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
v
a
r
/
a
r
t
i
c
e
-
p
d
l
f
/
/
/
/
2
7
3
3
0
9
2
0
0
3
6
7
7
p
r
e
s
_
a
_
0
0
3
3
3
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3