Maintaining Common Ground in Dynamic Environments
Takuma Udagawa1 and Akiko Aizawa1,2
The University of Tokyo, Tokyo, Japan1
National Institute of Informatics, Tokyo, Japan2
{takuma udagawa,aizawa}@nii.ac.jp
Astratto
Common grounding is the process of creat-
ing and maintaining mutual understandings,
which is a critical aspect of sophisticated
human communication. While various task set-
tings have been proposed in existing literature,
they mostly focus on creating common ground
under a static context and ignore the aspect
of maintaining them overtime under dynamic
context. In this work, we propose a novel task
setting to study the ability of both creating
and maintaining common ground in dynamic
environments. Based on our minimal task for-
mulation, we collected a large-scale dataset of
5,617 dialogues to enable fine-grained evalua-
tion and analysis of various dialogue systems.
Through our dataset analyses, we highlight
novel challenges introduced in our setting,
such as the usage of complex spatio-temporal
expressions to create and maintain common
ground. Finalmente, we conduct extensive experi-
ments to assess the capabilities of our baseline
dialogue system and discuss future prospects
of our research.
1
introduzione
Common grounding is the process of creating,
repairing, and updating mutual understandings
(cioè., common ground), which is a critical aspect
of sophisticated human communication (Clark,
1996). Humans can create substantial common
ground by expressing various information in nat-
ural language, which can be clarified or repaired
to resolve misunderstandings at essential levels
of detail. Inoltre, as the situation changes
and relevant information gets outdated, humans
can update their common ground accordingly by
discarding old information and acquiring new
ones. Such ability plays a vital role in sustain-
ing collaborative relationships and adapting to
emerging problems in nonstationary, real-world
environments.
Tuttavia, despite the wide variety of tasks pro-
posed in existing literature (Fang et al., 2015;
995
Zarrieß et al., 2016; De Vries et al., 2017;
Udagawa and Aizawa, 2019; Haber et al., 2019),
they mostly focus on creating common ground
under static (time-invariant) context and ignore
their dynamic aspects. While some recent dia-
logue tasks deal with dynamic information, Essi
often lack suitable evaluation metrics (Pasunuru
and Bansal, 2018), context updates in the course
of the dialogue (Alamri et al., 2019), or diverse
dynamics of the environment itself (De Vries
et al., 2018; Suhr et al., 2019; Narayan-Chen et al.,
2019; Thomason et al., 2019; Moon et al., 2020).
Therefore, it remains unclear how well existing
dialogue systems can adapt to the diversely chang-
ing situations through advanced common ground-
ing (§2).
To address this problem, we propose a novel
dialogue task based on three design choices (§3):
Primo, we formulate a novel sequential collabo-
rative reference task as a temporal generalization
of the collaborative reference task proposed in He
et al. (2017) and Udagawa and Aizawa (2019). In
our formulation, the goal of the agents is gener-
alized to track and select the common entity at
multiple timesteps, while the agents’ observations
change dynamically between each timestep. Questo
setting requires both creation and maintenance of
common ground, while enabling clear evaluation
based on the length of successful timesteps.
Secondly, we focus on synthesizing the entity
movements, as popularized in the recent video un-
derstanding benchmarks (Girdhar and Ramanan,
2020; Yi et al., 2020; Bakhtin et al., 2019). By
leveraging such synthetic dynamics, we can min-
imize undesirable biases, maximize diversity, E
enable fully controlled evaluation and analysis.
Finalmente, we build upon the OneCommon Corpus
(Udagawa and Aizawa, 2019) to introduce natu-
ral difficulty of common grounding with minimal
task complexity. To be specific, we represent en-
tity attributes and their temporal dynamics based
on continuous real values to introduce high am-
biguity and uncertainty. Inoltre, we consider
Operazioni dell'Associazione per la Linguistica Computazionale, vol. 9, pag. 995–1011, 2021. https://doi.org/10.1162/tacl a 00409
Redattore di azioni: Michel Galley. Lotto di invio: 1/2021; Lotto di revisione: 4/2021; Pubblicato 9/2021.
C(cid:2) 2021 Associazione per la Linguistica Computazionale. Distribuito sotto CC-BY 4.0 licenza.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
T
l
UN
C
_
UN
_
0
0
4
0
9
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
T
l
UN
C
_
UN
_
0
0
4
0
9
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figura 1: Example dialogue of our sequential collaborative reference task (§3). Each agent has a partial view of a
2-D plane with synthetic entities (grayscale dots of various sizes). During each turn, the entities move randomly
on the 2-D plane. At the end of each turn, the agents communicate with each other to find and select one of the
same, common entities. After each turn (if the selections match), both agents’ views shift randomly and the next
turn begins. Note that the colored polygons (indicating the referents of the underlined expressions) are shown for
illustration purposes only and not visible to the agents nor provided in the current dataset.
a partially observable setting where each agent
only has a partial view of the environment, Quale
introduces various misunderstandings and partial
understandings that need to be resolved.
Based on this task design, we collected a large-
scale dataset of 5,617 dialogues (including over
65K utterances) through careful crowdsourcing
on Amazon Mechanical Turk (§4).
We show an exemplary dialogue of our task
in Figure 1. Since the environment is dynamic,
humans rely on various spatio-temporal expres-
sions to express entity states at different timesteps
(‘‘started off on the left’’, ‘‘ends to the right’’)
or how they changed dynamically (‘‘moves very
quickly’’, ‘‘come towards the left’’) to create com-
mon ground. Inoltre, in later turns, humans
often leverage their previous common ground
(‘‘still see the same one?’’, ‘‘crosses underneath
our old one’’) to update their common ground
more reliably and efficiently. We conduct detailed
analyses of the dataset to study such strategies
in §5.
In our experiments (§6), we train a neural-based
dialogue system based on Udagawa and Aizawa
(2020). Through our extensive evaluation and
analysis, we assess the current model’s strengths
as well as important limitations and demonstrate
huge room left for further improvement.
Overall, our main contributions are:
• Proposal of a novel dialogue task to study com-
mon grounding in dynamic environments.
• Large-scale dataset of 5,617 dialogues to
develop and test various data-driven models.1
• Detailed dataset analyses that highlight novel
challenges introduced in our setting.
• Extensive evaluation and analysis of a simple
yet strong baseline dialogue system.
1Our code and dataset are publicly available at https://
github.com/Alab-NII/dynamic-onecommon.
996
Dataset
Twitch-FIFA (Pasunuru and Bansal, 2018)
AVSD (Alamri et al., 2019)
SIMMC (Moon et al., 2020)
MutualFriends (He et al., 2017)
GuessWhat?! (De Vries et al., 2017)
Photobook Dataset (Haber et al., 2019)
OneCommon (Udagawa and Aizawa, 2019)
Dynamic-OneCommon (Ours)
Environment (Context Type)
Continuous Partially Observable Dynamic Update
Context Context
Fonte
Evaluation of
Common Grounding
Synthetic
Real
Synthetic+Real
Synthetic
Real
Real
Synthetic
N/A
Indirect
Indirect
Create
Create
Create
Create
Synthetic
Create+Maintain
Tavolo 1: Comparison with the major datasets. Environments are considered dynamic if they involve
ricco, spontaneous dynamics and contexts to be updated if new information is provided in the course of
the dialogue.
2 Related Work
The notion of common ground was originally in-
troduced in Lewis (1969) and Stalnaker (1978)
and theoretically elaborated in fields such as psy-
cholinguistics (Clark and Brennan, 1991; Brennan
et al., 2010). While formal approaches (rule/
logic-based) exist to computationally model the
process of common grounding (Traum, 1994; Van
Ditmarsch et al., 2007; Poesio and Rieser, 2010),
capturing their full complexities in realistic, situ-
ated conversations remains a formidable problem.
From an empirical perspective, various dialogue
tasks have been proposed to develop and evalu-
ate data-driven models of common grounding.
Most of the existing literature focuses on closed
domain, goal-oriented settings to measure the
ability both quantitatively and objectively (Fang
et al., 2015; Zarrieß et al., 2016; De Vries et al.,
2017). Recent works, summarized as the grounded
agreement games in Schlangen (2019), introduce
symmetric speaker roles to encourage more bi-
lateral interaction. Udagawa and Aizawa (2019)
also raise continuous and partially observable
context to be essential for requiring advanced
common grounding (§3.1). Finalmente, Haber et al.
(2019) propose a multi-round image identification
task, where different combinations of images are
provided to each agent at every round. While this
setting is useful for studying subsequent refer-
ences affected by the existing common ground
(Brennan and Clark, 1996; Takmaz et al., 2020),
the observations in each round are static, tem-
porarily independent images. Hence, all of these
tasks focus on creating common ground under
static context and lack evaluation metrics for main-
taining common ground in dynamic environments.
We also note that some recent dialogue tasks re-
quire dealing with dynamic information, although
common grounding usually takes place implicitly
and may be difficult to measure directly. For in-
stance, Alamri et al. (2019) proposed Q&A-based
dialogues grounded in video contexts. Tuttavia,
the information given to each agent remains fixed
throughout the dialogue, requiring creation but
minimal update of common ground. Many recent
works also focus on dialogues grounded in exter-
nal environments (De Vries et al., 2018; Suhr et al.,
2019; Narayan-Chen et al., 2019; Thomason et al.,
2019; Moon et al., 2020). These settings often in-
volve dynamic change of the perspectives, but they
usually assume the environments themselves to be
stationary and do not change spontaneously (con-
out direct intervention). In contrast to these works,
we introduce both context updates in the course
of the dialogue and diverse dynamics of the ex-
ternal environment to require advanced common
grounding.2 We summarize our comparison with
the major existing datasets in Table 1.
Finalmente, our work is relevant to the emerging lit-
erature on spatio-temporal grounding in computer
vision and NLP. This includes video QA (Lei
et al., 2018; Yu et al., 2019; Castro et al., 2020),
video object grounding (Zhou et al., 2018; Chen
et al., 2019; Sadhu et al., 2020), and video cap-
tioning (Krishna et al., 2017UN), all of which are
essential subtasks in our dialogue. Tuttavia, exist-
ing resources often contain exploitable biases and
lack visual/linguistic diversity as well as reliable
evaluation metrics (especially in language gener-
ation) (Aafaq et al., 2019). It is also challenging to
probe model behaviors without the controllabil-
ity of the video contexts (Girdhar and Ramanan,
2While Pasunuru and Bansal (2018) collected live-stream
dialogues grounded in soccer video games, the non-goal-
oriented, unconstrained nature of their setting makes evalua-
tion and analysis of common grounding very challenging.
997
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
T
l
UN
C
_
UN
_
0
0
4
0
9
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
✓
✗
✓
✓
✓
✓
✓
✗
✓
✗
✗
✓
✗
✓
✗
✗
✓
✗
✗
✗
✓
✓
✗
✓
✓
✓
✗
✗
✓
✓
✓
✓
2020). We have addressed such concerns based
on our task design (§3.2) and expect our resource
to be useful for promoting this line of research as
BENE.
3 Task Formulation
In this section, we review the collaborative ref-
erence task from OneCommon Corpus (OCC in
short) and formulate our sequential counterpart as
its temporal generalization.
3.1 Collaborative Reference Task
Based on Udagawa and Aizawa (2019), a collabo-
rative reference task is a multi-agent cooperative
game with entities E = {e1, e2, . . . , em} E
agents A = {a1, a2, . . . , an}. Each agent aj ∈ A
has an observation of entities obsj(E) and can
exchange information with other agents in natural
lingua. At the end of the game, each agent se-
lects one of the observable entities, and the game
is successful if and only if all the agents selected
the same entity.3 This can be considered as a
general framework for evaluating accurate mutual
recognition of a common entity, which is often a
critical step in general common grounding.
One main feature of OCC is that it represented
all entity attributes (colore, size and location on a
2-D plane) based on continuous real values. E-
like discrete/categorical attributes, this introduces
high ambiguity and uncertainty to be expressed in
symbolic natural language. Inoltre, OCC in-
troduced partial-observability, where each agent
only has a partial view of the 2-D plane, Quale
requires collaborative resolution of various misun-
derstandings. We show an example of a successful
dialogue from OCC in Figure 2.
Tuttavia, this current task formulation assumes
each observation to be static and can only evaluate
the ability of creating common ground.
3.2 Sequential Collaborative Reference Task
To address this limitation, we generalize each
observation to be dynamic and collaborative ref-
erence to be sequential. Specifically, each agent
aj ∈ A now receives observation obsj(E, T)
at each timestep t ∈ [t0, ∞), and the agents’
3In contrast to the typical reference tasks (De Vries et al.,
2017), agent roles are symmetric and they can agree upon any
of the common entities (as long as it’s the same).
Figura 2: Example dialogue from OneCommon Cor-
pus (OCC). We can see that the human players are
able to detect misunderstandings and make flexible
clarifications to reduce ambiguity and uncertainty.
is to communicate in natural
lingua
goal
to select the same entity at multiple timesteps
t1, t2, . . . ∈ (t0, ∞).4 At each selection timestep
tk (k ∈ N), aj must select one entity observ-
able at tk but has all previous observations up
to tk, {obsj(E, T)|t ∈ [t0, tk]}. The game ends
when the selections no longer match at timestep
tk(cid:5) (k(cid:5) ∈ N): Therefore, the success at t1 mea-
sures the ability of creating common ground, E
the length of successful timesteps (LST) k(cid:5) − 1
measures the ability of maintaining them. This is
a general framework for evaluating both creation
and maintenance of mutual entity recognition in
dynamic environments.
Based on this task formulation, noi professionisti-
pose a minimal
task setting extending OCC
and incorporate dynamic change of the entity
locations.
We refer to each time range [tk−1, tk] as turn k.
During each turn, we change the location of each
entity ei ∈ E based on a simple parameterized
movement, where the trajectory is determined
4We assume tk−1 < tk for all k ∈ N.
998
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
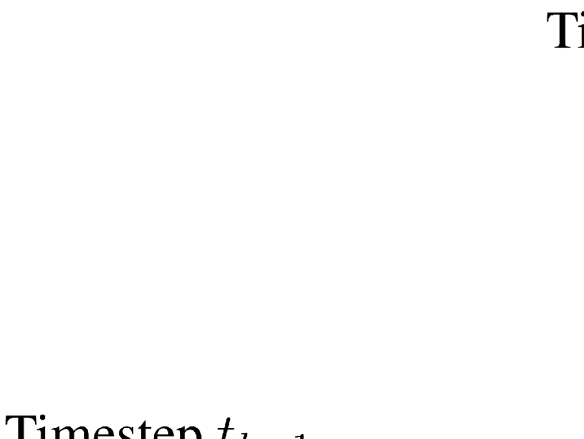
4 Dataset Collection
To collect large-scale, high-quality dialogues, we
conducted careful crowdsourcing on Amazon Me-
chanical Turk. The Web application is based on
the CoCoA framework (He et al., 2017), and we
used Scalable Vector Graphics (SVG) to animate
entity movements and parallel shifts of the agent
perspectives. Before working on our task, crowd
workers were required to take a brief tutorial on the
task setting, dialogue interface, and instructions.
Sample screenshots of our dialogue interface and
tutorial are shown in Figure 4. Note that anima-
tions up to the current turn could be replayed
anytime for the ease of playing the game.7
To ensure worker quality, we required crowd
workers to have more than 500 completed HITs
and acceptance rates higher than 99%. To en-
courage success, we rewarded $0.25 for every successful turn plus additional bonuses for longer LST achieved (up to $0.25 if LST = 5). Finally,
we manually reviewed all submitted works and
excluded dialogues which clearly violated the in-
structions (e.g., relying on premature guessing or
other ineffective strategies8). We did not exclude
dialogues based on task failures (even if LST =
0), as long as they were based on valid strategies.
To solicit linguistic/strategic variety, we gen-
erally used a unique environment for each game.
However, if the task was unsuccessful (i.e., LST =
0), we allowed the environment to be reused in
another game. This way, we can expect to even-
tually collect successful (LST > 0) dialogues for
the relatively difficult environments as well.
Overall, we collected 5,804 dialogues, and after
the reviewing process, we were left with 5,617
qualified dialogues. We refer to this dataset as
Dynamic-OneCommon Corpus (D-OCC). Note
that our dataset is currently in English, ma il
dataset collection procedure is language-agnostic
and can be applied in any other languages.
5 Dataset Analysis
Prossimo, we conduct detailed analyses of the dataset
to study human common grounding strategies un-
der dynamic context. Whenever possible, noi diamo
comparative analyses with OCC to highlight the
effect of dynamic factors introduced in D-OCC.
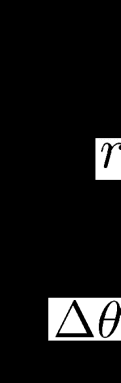
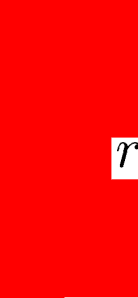
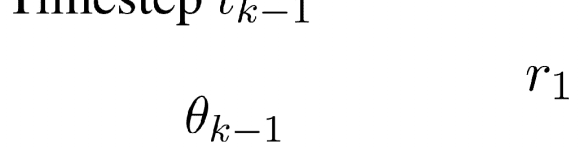
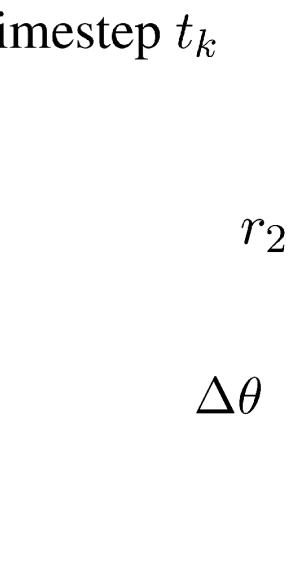
Figura 3: Illustrated movement of each entity in turn k.
by a quadratic B´ezier curve (B´ezier, 1974).5 Vedere
Figura 3 for an illustration, where r1, r2 are pa-
rameters of distance and θk−1, Δθ represent
angles. We sample r1, r2, Δθ from fixed uni-
form distributions each turn and update θk as
θk ← θk−1 + Δθ (θ0 is initialized randomly).
This way, we can generate diverse, unbiased, co-
herent, and fully controllable dynamics of the
ambiente.
To enable fair comparison with OCC, we limit
the number of agents to 2 and set the circular
agent views to have the same diameter as OCC.
At each selection timestep tk, we ensure that
each agent has 7 observable entities with only
4, 5, O 6 of them in common, which is also
identical to OCC. Finalmente, we sample all entity
attributes (colore, size, and initial location) from the
same uniform distributions as OCC with minimal
modifications.6 Therefore, we expect the (distri-
bution of) observations at tk to be similar and
enable mostly fair comparison with OCC (in §5
and §6).
To ensure task difficulty, we also shift the per-
spective of each agent after each successful turn
(Guarda la figura 1) so that the overlapping regions dif-
fer every turn. The same dot is prohibited from
staying in common for over 3 consecutive selec-
tion timesteps, requiring frequent updates of com-
mon ground. Finalmente, we limit
the maximum
number of turns to 5 for practical purposes (hence
the maximum LST is 5 in each game).
5Its speed is proportional to the length of the trajectory.
6To be specific, we set the minimum distance between en-
tities (at tk) and the possible range of entity size to be slightly
different to avoid entity overlapping during movements.
7This also allows us to ignore the disadvantage of im-
perfect human memories in comparison to machines.
8Typical examples include strategies relying solely on
colore, size, and absolute positions in the agent’s view.
999
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
T
l
UN
C
_
UN
_
0
0
4
0
9
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
T
l
UN
C
_
UN
_
0
0
4
0
9
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figura 4: (Top) Our dialogue interface. During the game, animations up to the current turn could be replayed
anytime using the forward/backward buttons. (Bottom) Sample screenshots from our tutorial on the task setting.
5.1 Overall Statistics
Statistics
OCC D-OCC
Primo, we summarize the overall statistics of OCC
and D-OCC in Table 2.
In total, OCC and D-OCC have a compara-
ble number of dialogues. Tuttavia, dialogues
can be much longer in D-OCC, since collabo-
rative reference is repeated multiple times. On
average, utterance lengths are slightly shorter in
D-OCC; this can be mostly attributed to the in-
creased (relative) frequency of short utterances
like acknowledgments and shortened subsequent
responses (per esempio., ‘‘same again?’’ = ‘‘select the
same black dot again?’’).9 Note that long, com-
plex utterances are also common in our dataset,
as seen in Figure 1. Overall, we found 462 unique
workers participated in D-OCC, which indicates
reasonable diversity at the player level as well.
In terms of LST, the overall average was 3.31
with over half (53.5%) of the dialogues suc-
ceeding all 5 turns. This suggests that humans
can solve the task reliably through sophisticated
common grounding. After filtering dialogues with
9Infatti, utterances with fewer than 5 tokens were almost
twice as frequent in D-OCC (33.8%) than OCC (17.6%).
11.7
10.3
5.7
6,760 5,617
Total dialogues
4.8
Uttrances per dialogue
Tokens per utterance
12.4
Duration per dialogue (minutes) 2.1
Unique workers
Avg. LST
Avg. completed turns
Unique tokens
Occupancy of rare tokens (%)
Overlap of all tokens (%)
Overlap w/o rare tokens (%)
3,621 3,895
1.4
3.31
3.77
29.4
53.0
N/A 462
1.0
–
–
Tavolo 2: Statistics of OCC and D-OCC datasets.
poor/careless workers (whose average LST < 2),
we observed a slight improvement up to 3.57. If
we only focus on the top 10 workers (with at least
10 tasks completed), average LST was signifi-
cantly higher reaching 4.24. These results indicate
that (at
least potentially) much higher human
ceiling performance can be achieved. Note that
if we include the last unsuccessful turn in 46.5%
of the dialogues, the average of all completed
turns was slightly longer (3.77) in our dataset.
1000
Examples
Freq.
Cohen’s κ
Reference
Current State
State Change
It’s to the right of where the grey one ended up for me after moving up and left.
Now I have another triangle / Does it land next to two smaller gray dots?
Does it have a lighter one below and to the left when they stop?
Two similar shades close to each other (implicit)
a small dark one traveling southwest / 2 other dots following it
Do you have two dark med-size dots move slowly apart as they drift right?
I have a large pale grey that moves down but starts out curving to the right and
then takes a sharp turn to the south east
Previous State
I still see the larger gray one that was next to it in the previous turn.
I have the smaller dot that started out below it to the left.
Before it moves, is there a lighter gray dot down and to the right of it?
23.8%
0.91
32.7%
0.97
5.5%
0.79
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Table 3: Spatio-temporal expressions. Keywords (such as tense, events, and motion verbs) are underlined.
Finally, we found that both datasets have a
relatively small vocabulary size as well as the
occupancy of rare tokens (used less than 10 times
in the dataset).10 This indicates minimal complex-
ity at the lexical level, as observed in Udagawa
and Aizawa (2019). We also found that the two
datasets have a large vocabulary overlap, which is
expected as D-OCC extends the setting of OCC.
5.2 Spatio-Temporal Expressions
At the utterance level, we observed an extensive
usage of spatio-temporal expressions, which are
characteristic in dynamic environments. To study
the frequency of such expressions, we manually
annotated 100 dialogues in D-OCC with LST ≥ 2
(focusing on the more successful strategies).
Specifically, we detect whether each utterance
contains 3 types of spatio-temporal expressions:11
• Reference to current state describes location
of entities at the end of the current turn (i.e.,
timestep tk if the utterance is in turn k).
• Reference to state change describes temporal
change of entity locations (i.e., movements).
• Reference to previous state describes entity
locations at previous timestep t (where t <
tk).
We show examples and estimated frequencies
of spatio-temporal expressions in Table 3. We also
10Occupancy is computed based on the proportion of total
frequencies (TF), i.e., TF of rare tokens / TF of all tokens.
11Note that a single utterance may contain none or multiple
types of such expressions, and expressions of color, size, or
possession are not considered as spatio-temporal expressions.
computed the agreement of our annotation based
on 50 dialogues with 3 annotators, which we found
to be reliable based on Cohen’s κ (Cohen, 1968).
Based on this result, we found that reference
to state change is the most widely used strategy,
which could be simple as ‘‘moves northwest’’ or
more complex as in Table 3. Reference to previous
state is much less frequent compared to other types
but still observed in many dialogues. Note that
humans distinguish previous and current states
in various ways, including temporal expressions
(‘‘was’’, ‘‘now’’), motion verbs (‘‘started out’’,
‘‘landed’’), and implicit/default reasoning.
We also found that expressions are often nu-
anced and pragmatic, which are characteristic
under continuous and partially observable context
(Udagawa and Aizawa, 2019). Nuances are typi-
cally expressed by the degree modifiers to convey
subtle differences in location, movements, con-
fidence, and so forth. Following Paradis (2008),
we categorize them into 2 main types (and 5 sub-
types): scalar modifiers used for concepts in a
range of scale (diminishers, moderators, boost-
ers) and totality modifiers used for concepts with
definite boundaries (approximators, maximizers).
See Table 4 for examples and the estimated occur-
rences of such modifiers in OCC and D-OCC.12
Based on these results, we can verify that there are
comparable numbers of various degree modifiers
in D-OCC as well, which are used effectively to
cope with complex ambiguity and uncertainty.
12Following the prior analysis in OCC, we manually cu-
rated keyword-based dictionaries of such modifiers (based on
unigrams and bigrams) while removing polysemous words
(such as little, about, too, etc).
1001
Degree Modifiers
Diminishers
Moderators
Boosters
Approximators
Maximizers
Scalar
Totality
OCC
9.2
1.3
9.8
10.2
4.3
D-OCC
8.9
0.9
6.1
6.4
4.2
Examples (# Keywords)
a bit, faintly, slightly (10)
fairly, rather, somewhat (6)
very, really, extraordinary (27)
almost, maybe, probably (34)
exactly, completely, definitely (37)
Usage in D-OCC
slightly curves up
fairly quickly
extremely slowly
almost collides with
perfectly straight
Table 4: Average occurrences of degree modifiers per 100 utterances (estimated based on keywords).
Figure 5: Pragmatic expressions of movements.
In Figure 5, we show examples of pragmatic
expressions that require pragmatic (non-literal)
interpretations (Monroe et al., 2017). For in-
stance, trajectories of the expression ‘‘straight
down’’ may not indicate vertical lines in the lit-
eral sense (e.g., could be curving or leaning to the
left). Similarly, the expression of ‘‘(moving) right
and (then) up’’ may be used for diverse move-
ments ending up in various locations (e.g., even
below the initial location!). While such expres-
sions more or less deviate from literal semantics,
they are pragmatically sufficient to convey the
speaker’s intention (i.e., identify the target among
the distractors) (Grice, 1975); alternatively, the
speaker may need to choose different expressions
for the same movement depending on the context
(distractors).
We also show exemplary expressions of mul-
tiple entity interactions in Figure 6, which de-
monstrate interesting pragmaticality as well. For
instance, ‘‘toward each other’’ may be used for
trajectories moving in orthogonal (rather than
opposite) directions for the most of the time.
Figure 6: Expressions of multiple entity interactions.
5.3 Turn-Level Strategies
Finally, we study and compare human strategies
at different timesteps (in different turns). Table 5
in the
shows detailed statistics of the dataset
initial turn and later turns, where creation and
maintenance of common ground are required, re-
spectively. Note that we also distinguish later turns
based on whether the previous selection (i.e., pre-
vious target) stays in common (✓
) or leaves at
least one agent’s view (✗ ): Former cases can re-
tain the same common ground but the latter cases
require an update of common ground.
First, if we focus on the 1st turn, we can ver-
ify that success rates are consistently higher in
D-OCC than OCC, especially in difficult cases
when the number of shared entities is smaller.
This indicates that humans can create common
ground more accurately by leveraging dynamic
information (e.g., entity movements) unavailable
in OCC.
Overall, our analyses of spatio-temporal expres-
sions reveal advanced language understanding and
generation required in D-OCC, regardless of the
task/lexical simplicity.
In later turns, we found that human performance
is near perfect with shorter dialogues in ✓
cases
(when the previous target stays in common). This
is natural because they can simply retain common
1002
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Dataset
Turn
OCC
D-OCC
1st
1st
≥2st
Previous
Target
#Shared=4
Success Rate (%)
#Shared=5
#Shared=6
Utterances
per Turn
Tokens per
Utterance
–
–
65.8
73.4
95.4
81.7
77.0
82.0
97.0
88.4
87.0
87.6
97.8
91.6
4.8
3.2
2.3
3.5
12.4
11.0
5.9
11.7
Table 5: Turn-level statistics of OCC and D-OCC. ✓ denotes cases where the previous target stays in
common and ✗ denotes it left at least one agent’s view. Note that # shared entities are 4, 5, or 6 at
selection timesteps (§3.2).
Previous Target
Stay (✓
)
Leave (✗ )
Examples
I still see the same dot / I still have all three dots from the line before
Left my screen, but may have come back traveling left to right?
I lost the last one / I lost the light one but still see the darker one that was on its left.
both are gone for me / similar size black dot that barely moves? (implicit)
Freq.
36.8%
63.2%
Table 6: Comparison of utterances when the previous target stays in common (✓
) or not (✗ ).
ground and repeat the same selection. Notably,
human performance is consistently higher than the
1st turn even in ✗ cases (when the previous target is
no longer in common), which verifies that humans
can leverage previous common ground to update
common ground more reliably as well.
We show example utterances of ✓
and ✗ cases
in Table 6. Note that the previous target may tem-
porarily leave the view and come back in ✓
cases,
which occasionally makes even retainment of the
same common ground non-trivial. In ✗ cases, hu-
mans either inform about the lost entities explicitly
or implicitly, for example, by ignoring old entities
and starting to focus on the new ones.
6 Experiments
Finally, we conduct extensive experiments to as-
sess our baseline model’s capability of common
grounding in dynamic environments.
6.1 Evaluation
To study the model’s capability from various as-
pects, we design 3 (sub)tasks based on D-OCC.
First, we evaluate the model’s ability of rec-
ognizing common ground based on the target
selection task, originally proposed for OCC. This
is an important subtask of (sequential) collabo-
rative reference, where the model is given one
player’s observation and the (ground-truth) dia-
logue history to predict which target was selected
by the player. Since there can be multiple selec-
tions in D-OCC, the model makes predictions at
the end of each turn k (at timestep tk). The num-
ber of entities observable at tk is fixed at 7 for
both OCC and D-OCC (§3.2), so this is a simple
classification task evaluated based on accuracy.
Secondly, we estimate the model’s ability of
creating and maintaining common ground based
on the selfplay dialogue task, where each model
plays the full sequential collaborative reference
task against an identical copy of itself. While this
evaluation has the advantage of being scalable
and automatic, succeeding on this setting is only
necessary for human-level common grounding
and not sufficient, since the model may only be
able to coordinate with itself (and not with real
humans).
Thirdly, we conduct human evaluation to test
the model’s ability of playing sequential collab-
orative reference against real human workers on
AMT. Due to the high cost of this evaluation, we
only focus on the top 3 variants of our baseline
ranked by average LST in the selfplay dialogue
task.
6.2 Model Architecture
For a fair comparison with prior work, we im-
plement our baseline model following the OCC
1003
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
✓
✗
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Figure 7: Our baseline model architecture. Information flow in turn k is illustrated. When generating model
utterances (in selfplay dialogue and human evaluation), we sample next tokens with the temperature set to 0.25.
models in Udagawa and Aizawa (2020). The
overall model architecture is shown in Figure 7.
To encode the dialogue tokens throughout the
turns, we use a unidirectional GRU (Cho et al.,
2014). To encode the observation during turn k,
we first split the animation of entity movements
into 10 frames and the agent view shift into 5
frames. Then, we process each observation frame
based on the spatial encoder, followed by the
temporal encoder to integrate these outputs.
The spatial encoder is used to extract spatial
features and meta features from each observation
frame. Spatial features represent the spatial at-
tributes of each entity (color, size, and location
in the frame), which are encoded using an MLP
and a relation network (Santoro et al., 2017). The
relation network is used to represent the spatial
attributes relative to a subset of entities ˜E ⊂ E,
which could be all entities observable in turn k
(Eall) or selectable entities visible at tk (Esel).
Hence, the spatial features of ei are computed as:
(cid:2)
MLP(ei) (cid:9)
MLP(ei − ej)
(1)
ej ∈ ˜E,
j(cid:10)=i
where ei is the vector representation of entity ei
and (cid:9) is the vector concatenation.13
13To be precise, ei is a 4-dimensional vector representing
color, size, and 2-D location. If the entity is not observable in
the frame, we use the default value of (0, 0) for the location.
Meta features are binary information of each
entity representing whether (or not) the entity (i)
is visible in the frame, (ii) is visible at timestep
tk, (iii) was visible at timestep tk−1, and (iv) was
selected in the previous turn (i.e., is the previous
target). Meta features are also encoded using an
MLP, and we take the sum of spatial/meta features
as the (entity-level) output of the spatial encoder.
Finally, we use the temporal encoder based
on a GRU to encode the outputs of the spatial
encoder. The final state of the temporal encoder
is considered as the final representation of each
entity.
Based on the outputs of these encoders, we
use two attention modules (based on MLPs) to
compute attention scores for each entity. The first
attention module is used to weight the final rep-
resentations of all entities Eall conditioned on the
current dialogue state: then, the weighted sum of
Eall is concatenated with the dialogue state to pre-
dict the next dialogue token (Xu et al., 2015). The
second module is used to predict the target entity,
where we simply take the (soft)max of attention
scores for the selectable entities Esel in turn k.
Note that there are only two main differences
between our baseline and the best OCC model
(TSEL-REF-DIAL) from Udagawa and Aizawa
(2020): First, in TSEL-REF-DIAL, the final rep-
resentation of each entity is its spatial features,
that is, the meta features and temporal encoder are
not used (which are only meaningful in D-OCC).
1004
Second, TSEL-REF-DIAL is also trained on the
reference resolution task (using an additional at-
tention module), which is only available in OCC.
Due to this architectural similarity, we can vir-
tually pretrain our model on OCC by initializing
the shared model parameters based on TSEL-
REF-DIAL and then fine-tune the whole model
on D-OCC.14
6.3 Experiment Setup
All modules of our baseline (MLPs and GRUs)
are single-layered with 256 hidden units, except
for the attention modules, which are 2-layered.
Dropout rate of 0.5 is applied at each layer during
training, and we use the Adam optimizer (Kingma
and Ba, 2015) with the initial learning rate set to
0.001. After manual tuning on the validation set,
we weight the losses from next token prediction
and target selection with the ratio of 2:1.
In terms of data splits, we use 500 dialogues
with LST ≥ 2 for testing target selection, another
500 for validation, and the rest for training.15 Note
that we use all unsuccessful turns (where the play-
ers failed to agree upon the same entity) as well,
assuming they are still based on valid strategies.
For selfplay dialogue and human evaluation, we
collect 2,000 and 200 dialogues in unseen environ-
ments, respectively. Each experiment is repeated
5 times with different random seeds (including
data splits), except for human evaluation.
Finally, we conduct extensive ablations to study
the effect of various model architectures, includ-
ing pretraining, spatial attributes (color, size, and
location), and the meta feature (previous target).
In addition, we also ablate the dynamic informa-
tion of the observation by only using the last frame
in each turn as the input for the temporal encoder.
6.4 Results
We show the results for target selection in Table 7.
Human performance is estimated by 3 annotators
based on 50 dialogues with LST ≥ 2.
Based on these results, we can verify that all
ablations hurt the performance of our baseline in
some way. Pretraining on OCC is generally ef-
fective, and all spatial attributes contribute to the
14For pretraining, we retrained TSEL-REF-DIAL with the
shared word embedding for OCC and D-OCC.
Model
Baseline
– pretraining
– color
– size
– location
– previous target
– dynamics
Human
Turn / Previous Target
≥2nd / ✓
≥2nd / ✗
1st / –
76.4±1.7
74.6±2.7
56.3±2.0
58.4±1.3
74.4±1.5
76.1±1.7
75.1±2.3
97.0±1.1
96.6±0.3
96.3±0.7
95.7±0.6
95.7±0.9
96.1±0.9
∗
83.3±1.1
96.7±1.0
∗
98.2±0.5
67.4±0.5
66.9±1.1
50.5±1.4
52.2±0.5
67.3±0.7
∗
67.8±0.6
67.0±0.7
∗
95.8±2.0
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Table 7: Results for the target selection task
(∗ denotes cases where the correct previous targets
were not provided during prediction).
overall performance (especially color and size).
When the meta feature of the correct previous
target is available, all models perform remarkably
well in ✓
cases (previous target stays in common),
which is natural since humans often repeated the
same selection. Finally, dynamic information also
contributes to the baseline performance, despite
the effect being rather marginal.
However, there is huge room left for improve-
ment in the 1st turn and even more so in ✗ cases
(previous target no longer in common). These
results indicate that recognizing the creation of
common ground is still difficult, and recogniz-
ing how they are updated (rather than retained)
remains even more challenging for the current
baseline.
Next, we show the results for selfplay dialogue
and human evaluation in Table 8. We also include
the results of TSEL-REF-DIAL (trained on OCC
without fine-tuning on D-OCC) as a reference.16
In selfplay dialogue, we can verify that the
baseline model performs reasonably well, out-
performing TSEL-REF-DIAL in the 1st turn of
D-OCC (as well as OCC). However, it is worth
noting that TSEL-REF-DIAL may be suffering
from a minor covariate shift in D-OCC (c.f. §3.2),
and without pretraining, our baseline still under-
performs this best OCC model. We also found that
all ablations of spatial attributes hurt performance,
while the locational attributes became more criti-
cal in the full dialogue task. The meta feature of
the previous target (selected by the model) is also
critical, as the models seem to be relying heavily
on this feature to both retain and update the target.
15We ensured no overlaps in terms of the environments
16When testing TSEL-REF-DIAL on D-OCC, we used the
across data splits.
spatial features of the last observation frame as the input.
1005
Model
Dataset Turn
Baseline
D-OCC
– pretraining
D-OCC
– color
D-OCC
– size
D-OCC
– location
D-OCC
– previous target D-OCC
– dynamics
D-OCC
TSEL-REF-DIAL
D-OCC
OCC
1st
≥2nd
1st
≥2nd
1st
≥2nd
1st
≥2nd
1st
≥2nd
1st
≥2nd
1st
≥2nd
1st
1st
1st
Human
D-OCC
≥2nd
Previous
Target
–
–
–
–
–
–
–
–
–
–
Seflplay Dialogue
#Shared=4
46.8±1.8
99.4±0.3
48.5±2.2
39.4±1.0
98.6±2.4
30.3±5.7
36.3±2.0
99.7±0.1
42.1±3.5
41.5±0.8
99.8±0.1
39.6±3.5
45.7±1.9
99.8±0.1
40.8±3.6
49.2±1.3
85.8±2.7
29.2±1.5
49.2±2.2
99.9±0.1
48.3±2.2
41.0±1.2
45.9±1.6
Success Rate (%)
#Shared=5
63.8±1.8
99.7±0.2
64.6±2.8
53.5±0.8
98.8±1.8
42.1±6.3
54.6±2.3
99.7±0.0
56.7±4.2
58.0±0.9
99.7±0.1
55.3±3.6
60.4±1.6
99.7±0.0
54.6±2.5
64.0±1.8
87.5±1.6
41.9±1.9
65.8±1.3
99.9±0.1
63.5±2.8
58.7±1.1
62.7±2.2
#Shared=6
80.2±2.3
99.6±0.2
81.5±1.5
73.7±1.8
99.4±1.0
65.4±4.9
72.9±1.5
99.6±0.1
72.4±4.6
75.2±1.3
99.8±0.2
69.9±1.5
77.7±1.7
99.7±0.1
73.9±4.2
82.2±2.0
91.2±1.3
64.5±1.0
83.3±1.9
99.8±0.1
81.1±2.1
76.0±1.8
79.7±1.0
73.4
95.4
81.7
82.0
97.0
88.4
87.6
97.8
91.6
Avg.
LST
1.94±0.09
Avg.
LST
Human Evaluation
Success
Rate (%)
44.5
81.9
44.4
1.00
1.35±0.09
N/A
N/A
1.50±0.10
N/A
N/A
1.58±0.07
N/A
N/A
1.68±0.09
40.0
91.8
36.3
0.81
1.45±0.05
N/A
N/A
2.02±0.07
–
3.31
37.0
86.8
39.2
N/A
80.5
96.7
86.6
0.79
–
3.31
Table 8: Results for the sequential collaborative reference task (selfplay dialogue and human
evaluation). Human performance is estimated based on the overall average of the crowd workers (c.f.
Table 2 and 5).
However, we found that ablation of dynamic
information does not degrade (actually improves)
performance in selfplay dialogue. This indicates
that the last frame of each turn (current state) is
sufficient for the baseline to coordinate with itself,
and it is unlikely to be leveraging sophisticated
temporal information (state change or previous
state) like the human strategies seen in §5.2.
Also, while the models perform near perfectly
in ✓
cases, the success rates drop or do not im-
prove significantly in ✗ cases (compared with the
1st turn). This shows that current models can re-
tain the same common ground easily but struggle
in updating them using the previous common
ground, unlike the human strategies seen in §5.3.
Finally, in human evaluation, we could verify
that our baseline performs the best of the top
3 models in the selfplay dialogue task, but the
success rates were much lower than observed in
selfplay. This indicates that current models may
not be using natural language in the same way
humans use it (i.e., are not properly grounded
[Bender and Koller, 2020]), although they do
become closer to it when all the features are
available.17
To summarize, our results in sequential collab-
orative reference show that the current baseline
can leverage all spatial features and retain the
same common ground, especially when provided
explicitly as the meta feature. However, it may
not be using temporal information effectively, and
the creation and update of common ground still
remain challenging in the dynamic environments,
especially when conversing with real humans.
7 Discussion and Conclusion
In this work, we proposed a novel dialogue task
to study the ability of creating, retaining and
17At the superficial level, all models could generate fluent
utterances and complete the task with minimal confusion.
1006
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
✓
✗
✓
✗
✓
✗
✓
✗
✓
✗
✓
✗
✓
✗
✓
✗
updating common ground in dynamic environ-
ments. The introduced dynamics are fully con-
trollable in our setting to maximize diversity,
minimize biases and enable reliable evaluation and
analysis. Based on our dataset analyses and exper-
iments, we demonstrated the advanced strategies
of common grounding required and the open
room for improvement in our newly developed
Dynamic-OneCommon Corpus (D-OCC).
In future work, we plan to utilize and enrich this
dataset in several ways. For instance, we can con-
duct various causal analysis, for example, by
changing certain feature of entities (such as move-
ment) and studying the differences in model be-
havior, which is essential yet difficult to conduct
in many existing datasets (c.f. §2). Another prom-
ising direction is to add fine-grained annotation
of reference resolution (Udagawa and Aizawa,
2020), as (partially) illustrated in Figure 1. We
can also annotate spatio-temporal expressions, for
example, by following the procedure in Udagawa
et al. (2020). Such annotations would allow us
to gain deeper understandings of the intermedi-
ate process of common grounding: For instance,
we can study whether the developed models rec-
ognize and use the spatio-temporal expressions
appropriately and consistently in a human-like
way (i.e., not only imitate at the superficial level,
as observed in §6.4).
In order to improve the model performance,
we are considering several approaches. One ap-
proach is to make the model learn from task
success (and failure) through reinforcement learn-
ing. Due to the symmetric agent roles in our
task, this is straightforward to conduct through
selfplay (Lewis et al., 2017; Yarats and Lewis,
2018), and we can expect the models to avoid
ineffective strategies like underspecification and
the in-
premature guessing. We also expect
corporation of pragmatic reasoning to be a
fruitful area of future research. One representative
approach is the Rational Speech Act (RSA) frame-
work (Goodman and Frank, 2016), which has
been applied in both continuous (Monroe et al.,
2017) and partially observable domains (Hawkins
et al., 2021). However, application in dynamic
domains would involve additional complexities
that need to be taken into account, such as the
dependencies on previous common ground. Fi-
nally, we are planning to study wider variety
of model architectures and pretraining datasets,
including video-processing methods (Carreira and
Zisserman, 2017; Wang et al., 2018), vision-
language grounding models (Lu et al., 2019; Le
et al., 2020), and large-scale, open domain data-
sets (Krishna et al., 2017b; Sharma et al., 2018).
Note that the entity-level representation of the
observation (required in our baseline) can be ob-
tained from raw video features, for example, by
utilizing the object trackers (Bergmann et al.,
2019; Wang et al., 2020).
Finally, we’d like to discuss the main limitation
of our current work, namely, the ecological valid-
ity (De Vries et al., 2020) of D-OCC. Since we
focused on the simplest task setting under contin-
uous, partially observable and dynamic context,
direct application of our work in realistic settings
may not be straightforward. However, the generic
strategies required in our setting are fundamental
in many real-world applications. For an illus-
tration, imagine a navigation task in a dynamic
environment, such as finding a lost child in an ur-
ban city. Since the target entity (the child) may not
stay in one place, routing directions can no longer
be fixed and need to be updated accordingly (as
in ‘‘now head more to the west’’ or ‘‘go back to
the previous block’’). Furthermore, the landmark
entities may not be stationary either and could be
ephemeral (as in ‘‘following the group of travel-
ers’’ or ‘‘in the middle of the crowd’’). Lastly, if
the child is not conspicuous with confusable dis-
tractors (e.g., with many pedestrians around), the
descriptions need to be precise and distinguishing
(as in ‘‘wearing a little darker shirt’’ or ‘‘walking
right towards the station’’).
In order to study such (nuanced and pragmatic)
spatio-temporal expressions and references to pre-
vious common ground, we expect D-OCC to be
an essential proving ground. In addition, our se-
quential collaborative reference task is defined
generally (c.f. §3.2), so we can easily scale up
the task complexity to study the desired dynamics
under consideration: the exploration of differ-
ent, potentially more complex dynamics is an
important research area left as future work.
Overall, we expect our task design, resource,
and analyses to be fundamental for developing
dialogue systems that can both create and maintain
common ground in dynamic environments.
Acknowledgments
We are grateful
to our action editor, Michel
Galley, and the three anonymous reviewers for
1007
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
their valuable suggestions that helped improve
this paper. We also thank Saku Sugawara and
Taichi Iki for their constructive feedback on earlier
versions of this paper. This work was supported
by JSPS KAKENHI grant number 21H03502.
References
Nayyer Aafaq, Ajmal Mian, Wei Liu, Syed
Zulqarnain Gilani, and Mubarak Shah. 2019.
Video description: A survey of methods, data-
sets, and evaluation metrics. ACM Computing
Surveys, 52(6):1–37. https://doi.org
/10.1145/3355390
Huda Alamri, Vincent Cartillier, Abhishek Das,
Jue Wang, Anoop Cherian, Irfan Essa, Dhruv
Batra, Tim K. Marks, Chiori Hori, Peter
Anderson, Stefan Lee, and Devi Parikh. 2019.
Audio visual scene-aware dialog. In Proceedings
of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 7558–7567.
https://doi.org/10.1109/CVPR.2019
.00774
Anton Bakhtin, Laurens van der Maaten, Justin
Johnson, Laura Gustafson, and Ross Girshick.
2019. PHYRE: A new benchmark for physical
reasoning. In Advances in Neural Information
Processing Systems, pages 5082–5093.
Emily M. Bender and Alexander Koller. 2020.
Climbing towards NLU: On meaning, form,
and understanding in the age of data.
In
Proceedings of the 58th Annual Meeting of
the Association for Computational Linguistics,
pages 5185–5198. https://doi.org/10
.18653/v1/2020.acl-main.463
Philipp Bergmann, Tim Meinhardt, and Laura
Leal-Taix´e. 2019. Tracking without bells and
whistles. In International Conference on Com-
puter Vision. https://doi.org/10.1109
/ICCV.2019.00103
Pierre B´ezier. 1974. Mathematical and practical
possibilities of UNISURF. In Computer Aided
Geometric Design, pages 127–152. Elsevier.
https://doi.org/10.1016/B978-0-12
-079050-0.50012-6
Susan E. Brennan and Herbert H. Clark. 1996.
Conceptual pacts and lexical choice in conver-
sation. Journal of Experimental Psychology:
Learning, Memory, and Cognition, 22:1482–93.
https://doi.org/10.1037/0278-7393
.22.6.1482
Susan E. Brennan, Alexia Galati, and Anna
K. Kuhlen. 2010. Two minds, one dialog:
Coordinating speaking and understanding.
In Psychology of Learning and Motivation,
volume 53, pages 301–344. Elsevier. https://
doi.org/10.1016/S0079-7421(10)53008-1
J. Carreira and Andrew Zisserman. 2017. Quo
vadis, action recognition? A new model and
the kinetics dataset. In Proceedings of the IEEE
Conference on Computer Vision and Pattern
Recognition, pages 4724–4733.
Santiago Castro, Mahmoud Azab,
Jonathan
Stroud, Cristina Noujaim, Ruoyao Wang, Jia
Deng, and Rada Mihalcea. 2020. LifeQA: A
real-life dataset for video question answering.
In Proceedings of the 12th Language Resources
and Evaluation Conference, pages 4352–4358.
Zhenfang Chen, Lin Ma, Wenhan Luo, and Kwan-
Yee Kenneth Wong. 2019. Weakly-supervised
spatio-temporally grounding natural sentence
in video. In Proceedings of the 57th Annual
Meeting of the Association for Computational
Linguistics, pages 1884–1894. https://doi
.org/10.18653/v1/P19-1183
Kyunghyun Cho, Bart van Merrienboer, Dzmitry
Bahdanau, and Yoshua Bengio. 2014. On
the properties of neural machine translation:
Encoder–decoder approaches. In Proceedings
of SSST-8, Eighth Workshop on Syntax, Seman-
tics and Structure in Statistical Translation,
pages 103–111.
Herbert H. Clark. 1996. Using Language.
Cambridge University Press. https://doi
.org/10.1037/10096-006
Herbert H. Clark and Susan E. Brennan. 1991.
Grounding in communication. In Perspectives
on Socially Shared Cognition, pages 127–149.
American Psychological Association.
Jacob Cohen. 1968. Weighted kappa: Nominal
scale agreement provision for scaled disagree-
ment or partial credit. Psychological Bulletin,
70(4):213. https://doi.org/10.1037
/h0026256, Pubmed: 19673146
1008
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Harm De Vries, Dzmitry Bahdanau,
and
Christopher Manning. 2020. Towards ecologi-
cally valid research on language user interfaces.
arXiv preprint arXiv:2007.14435.
for asymmetries in visual perspective. Cog-
nitive Science, 45 3:e12926. https://doi
.org/10.1111/cogs.12926,
Pubmed:
33686646
Harm De Vries, Kurt Shuster, Dhruv Batra,
Devi Parikh, Jason Weston, and Douwe Kiela.
2018. Talk the walk: Navigating new york
city through grounded dialogue. arXiv preprint
arXiv:1807.03367.
Harm De Vries, Florian Strub, Sarath Chandar,
Olivier Pietquin, Hugo Larochelle, and Aaron
Courville. 2017. Guesswhat?! Visual object
discovery through multi-modal dialogue. In
Proceedings of
the IEEE Conference on
Computer Vision and Pattern Recognition,
pages 5503–5512. https://doi.org/10
.1109/CVPR.2017.475
Rui Fang, Malcolm Doering, and Joyce Y. Chai.
2015. Embodied collaborative referring expres-
sion generation in situated human-robot interac-
tion. In Proceedings of the Tenth Annual ACM/
IEEE International Conference on Human-
Robot Interaction, HRI ’15, pages 271–278.
https://doi.org/10.1145/2696454
.2696467
Rohit Girdhar and Deva Ramanan. 2020. CATER:
A diagnostic dataset for compositional actions
and temporal reasoning. In International Con-
ference on Learning Representations.
Noah D. Goodman and Michael C. Frank.
2016. Pragmatic language interpretation as pro-
babilistic inference. Trends in Cognitive Sci-
ences, 20:818–829. https://doi.org/10
.1016/j.tics.2016.08.005, Pubmed:
27692852
H. Paul Grice. 1975. Logic and conversation.
Syntax and Semantics, 3:41–58.
Janosch Haber, Tim Baumg¨artner, Ece Takmaz,
Lieke Gelderloos, Elia Bruni, and Raquel
Fern´andez. 2019. The PhotoBook dataset: Build-
ing common ground through visually-grounded
dialogue. In Proceedings of the 57th Annual
Meeting of the Association for Computational
Linguistics, pages 1895–1910.
Robert X. D. Hawkins, H. Gweon, and Noah D.
Goodman. 2021. The division of labor in com-
munication: Speakers help listeners account
He He, Anusha Balakrishnan, Mihail Eric, and
Percy Liang. 2017. Learning symmetric collab-
orative dialogue agents with dynamic knowl-
edge graph embeddings. In Proceedings of the
55th Annual Meeting of the Association for
Computational Linguistics, pages 1766–1776.
https://doi.org/10.18653/v1/P17
-1162
Diederik P. Kingma and Jimmy Ba. 2015.
Adam: A method for stochastic optimiza-
tion. In International Conference on Learning
Representations.
Ranjay Krishna, Kenji Hata, Frederic Ren, Li
Fei-Fei, and Juan Carlos Niebles. 2017a.
Dense-captioning events in videos. In Inter-
national Conference on Computer Vision,
pages 706–715. https://doi.org/10.1109
/ICCV.2017.83
Ranjay Krishna, Yuke Zhu, Oliver Groth, Justin
Johnson, Kenji Hata, Joshua Kravitz, Stephanie
Chen, Yannis Kalantidis, Li-Jia Li, David A.
Shamma, Michael S. Bernstein, and Li Fei-Fei.
2017b. Visual genome: Connecting language
and vision using crowdsourced dense image
annotations. International Journal of Com-
puter Vision, 123(1):32–73. https://doi
.org/10.1007/s11263-016-0981-7
Hung Le, Doyen Sahoo, Nancy Chen, and
Steven C.H. Hoi. 2020. BiST: Bi-directional
spatio-temporal reasoning for video-grounded
dialogues. In Proceedings of the 2020 Con-
ference on Empirical Methods in Natural
Language Processing, pages 1846–1859.
Jie Lei, Licheng Yu, Mohit Bansal, and Tamara
Berg. 2018. TVQA: Localized, composi-
tional video question answering. In Proceed-
the 2018 Conference on Empirical
ings of
Methods in Natural Language Processing,
pages 1369–1379. https://doi.org/10
.18653/v1/D18-1167
David Lewis. 1969. Convention: A Philosophical
Study. Harvard University Press.
1009
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Mike Lewis, Denis Yarats, Yann Dauphin, Devi
Parikh, and Dhruv Batra. 2017. Deal or no deal?
End-to-end learning of negotiation dialogues. In
Proceedings of the 2017 Conference on Empir-
ical Methods in Natural Language Processing,
pages 2443–2453. https://doi.org/10
.18653/v1/D17-1259
Jiasen Lu, Dhruv Batra, Devi Parikh, and Stefan
Lee. 2019. ViLBERT: Pretraining task-agnostic
visiolinguistic representations for vision-and-
language tasks. In Advances in Neural Informa-
tion Processing Systems, pages 13–23.
Will Monroe, Robert X. D. Hawkins, Noah D.
Goodman, and Christopher Potts. 2017. Col-
ors in context: A pragmatic neural model
for grounded language understanding. Trans-
actions of the Association for Computational
Linguistics, 5:325–338. https://doi.org
/10.1162/tacl_a_00064
Seungwhan Moon, Satwik Kottur, Paul Crook,
Ankita De, Shivani Poddar, Theodore Levin,
David Whitney, Daniel Difranco, Ahmad
Beirami, Eunjoon Cho, Rajen Subba, and
Alborz Geramifard. 2020. Situated and interac-
tive multimodal conversations. In Proceedings
of the 28th International Conference on Com-
putational Linguistics, pages 1103–1121.
Anjali Narayan-Chen, Prashant Jayannavar, and
Julia Hockenmaier. 2019. Collaborative dia-
logue in Minecraft. In Proceedings of
the
57th Annual Meeting of the Association for
Computational Linguistics, pages 5405–5415.
https://doi.org/10.18653/v1/P19
-1537
Carita Paradis. 2008. Configurations, constru-
als and change: Expressions of DEGREE.
English Language and Linguistics, 12(2):
https://doi.org/10.1017
317–343.
/S1360674308002645
Ramakanth Pasunuru and Mohit Bansal. 2018.
Game-based video-context dialogue. In Pro-
ceedings of the 2018 Conference on Empirical
Methods in Natural Language Processing,
125–136. https://doi.org/10
pages
.18653/v1/D18-1012
Massimo Poesio and Hannes Rieser. 2010.
Completions, coordination, and alignment in
dialogue. Dialogue and Discourse, 1:1–89.
https://doi.org/10.5087/dad.2010
.001
Arka Sadhu, Kan Chen, and Ram Nevatia. 2020.
Video object grounding using semantic roles
in language description. In Proceedings of the
IEEE Conference on Computer Vision and
Pattern Recognition, pages 10417–10427.
https://doi.org/10.1109/CVPR42600
.2020.01043
Adam Santoro, David Raposo, David G Barrett,
Mateusz Malinowski, Razvan Pascanu, Peter
Battaglia, and Tim Lillicrap. 2017. A simple
neural network module for relational reasoning.
In Advances in Neural Information Processing
Systems, pages 4967–4976.
David Schlangen. 2019. Grounded agreement
games: Emphasizing conversational ground-
ing in visual dialogue settings. arXiv preprint
arXiv:1908.11279.
Piyush Sharma, Nan Ding, Sebastian Goodman,
and Radu Soricut. 2018. Conceptual cap-
tions: A cleaned, hypernymed, image alt-text
dataset for automatic image captioning. In
Proceedings of the 56th Annual Meeting of
the Association for Computational Linguistics,
pages 2556–2565. https://doi.org/10
.18653/v1/P18-1238
Robert C Stalnaker. 1978. Assertion. Syntax and
Semantics, 9:315–332.
Alane Suhr, Claudia Yan, Jack Schluger, Stanley
Yu, Hadi Khader, Marwa Mouallem, Iris Zhang,
and Yoav Artzi. 2019. Executing instructions
in situated collaborative interactions. In Pro-
ceedings of the 2019 Conference on Empirical
Methods in Natural Language Processing and
the 9th International Joint Conference on Nat-
ural Language Processing, pages 2119–2130.
https://doi.org/10.18653/v1/D19
-1218
Ece Takmaz, Mario Giulianelli, Sandro Pezzelle,
Arabella Sinclair, and Raquel Fern´andez. 2020.
Refer, reuse, reduce: Generating subsequent
references in visual and conversational con-
texts. In Proceedings of the 2020 Conference
on Empirical Methods in Natural Language
Processing, pages 4350–4368. https://
1010
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
doi.org/10.18653/v1/2020.emnlp-main
.353
Jesse Thomason, Michael Murray, Maya Cakmak,
and Luke Zettlemoyer. 2019. Vision-and-dialog
navigation. In Conference on Robot Learning,
pages 394–406.
David R. Traum. 1994. A Computational Theory
of Grounding in Natural Language Conver-
sation. Ph.D. thesis, Department of Computer
Science, University of Rochester.
Takuma Udagawa and Akiko Aizawa. 2019. A
natural language corpus of common grounding
under continuous and partially-observable con-
text. In Proceedings of the AAAI Conference
on Artificial Intelligence, pages 7120–7127.
https://doi.org/10.1609/aaai.v33i01
.33017120
Takuma Udagawa and Akiko Aizawa. 2020. An
annotated corpus of reference resolution for in-
terpreting common grounding. In Proceedings
of the AAAI Conference on Artificial Intel-
ligence, pages 9081–9089. https://doi
.org/10.1609/aaai.v34i05.6442
Takuma Udagawa, Takato Yamazaki, and Akiko
Aizawa. 2020. A linguistic analysis of visu-
ally grounded dialogues based on spatial
expressions. In Findings of the Association for
Computational Linguistics: EMNLP 2020,
pages 750–765. https://doi.org/10
.18653/v1/2020.findings-emnlp.67
Hans Van Ditmarsch, Wiebe van Der Hoek, and
Barteld Kooi. 2007. Dynamic Epistemic Logic,
volume 337. Springer Science & Business
Media. https://doi.org/10.1007/978
-1-4020-5839-4
Xiaolong Wang, Ross Girshick, Abhinav Gupta,
and Kaiming He. 2018. Non-local neural net-
works. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recog-
nition, pages 7794–7803. https://doi
.org/10.1109/CVPR.2018.00813
Zhongdao Wang, Liang Zheng, Yixuan Liu,
and Shengjin Wang. 2020. Towards real-time
multi-object tracking. In European Conference
on Computer Vision. https://doi.org
/10.1007/978-3-030-58621-8_7
Kelvin Xu, Jimmy Ba, Ryan Kiros, Kyunghyun
Cho, Aaron Courville, Ruslan Salakhudinov,
Rich Zemel, and Yoshua Bengio. 2015. Show,
attend and tell: Neural image caption generation
with visual attention. In Proceedings of the In-
ternational Conference on Machine Learning,
pages 2048–2057.
Denis Yarats and Mike Lewis. 2018. Hier-
archical
text generation and planning for
strategic dialogue. In Proceedings of the In-
ternational Conference on Machine Learning,
pages 5587–5595.
Kexin Yi, Chuang Gan, Yunzhu Li, Pushmeet
Kohli, Jiajun Wu, Antonio Torralba, and Joshua
B. Tenenbaum. 2020. CLEVRER: Collision
events for video representation and reason-
ing. In International Conference on Learning
Representations.
Zhou Yu, Dejing Xu, Jun Yu, Ting Yu, Zhou
Zhao, Yueting Zhuang, and Dacheng Tao. 2019.
ActivityNet-QA: A dataset for understanding
complex web videos via question answering. In
Proceedings of the AAAI Conference on Artifi-
cial Intelligence, pages 9127–9134. https://
doi.org/10.1609/aaai.v33i01.33019127
Sina Zarrieß, Julian Hough, Casey Kennington,
Ramesh Manuvinakurike, David DeVault,
Raquel Fern´andez, and David Schlangen. 2016.
PentoRef: A corpus of spoken references in
task-oriented dialogues. In Proceedings of the
10th Language Resources and Evaluation
Conference, pages 125–131.
Luowei Zhou, Nathan Louis, and Jason J.
Corso. 2018. Weakly-supervised video object
grounding from text by loss weighting and
object interaction. In British Machine Vision
Conference.
1011
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
4
0
9
1
9
6
2
6
3
3
/
/
t
l
a
c
_
a
_
0
0
4
0
9
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3