LETTER
Communicated by Dina Obeid
Identifying and Localizing Multiple Objects Using Artificial
Ventral and Dorsal Cortical Visual Pathways
Zhixian Han
han594@purdue.edu
Department of Psychological Sciences, Purdue University, West Lafayette,
IN 47907, U.S.A.
Anne Sereno
asereno@purdue.edu
Department of Psychological Sciences and Weldon School of Biomedical Engineering,
Purdue University, West Lafayette, IN 47907, U.S.A.
In our previous study (Han & Sereno, 2022UN), we found that two artifi-
cial cortical visual pathways trained for either identity or space actively
retain information about both identity and space independently and dif-
ferently. We also found that this independently and differently retained
information about identity and space in two separate pathways may be
necessary to accurately and optimally recognize and localize objects. One
limitation of our previous study was that there was only one object in
each visual image, whereas in reality, there may be multiple objects in a
scene. In this study, we find we are able to generalize our findings to ob-
ject recognition and localization tasks where multiple objects are present
in each visual image. We constrain the binding problem by training the
identity network pathway to report the identities of objects in a given
order according to the relative spatial relationships between the objects,
given that most visual cortical areas including high-level ventral steam
areas retain spatial information. Under these conditions, we find that
the artificial neural networks with two pathways for identity and space
have better performance in multiple-objects recognition and localization
compiti (higher average testing accuracy, lower testing accuracy variance,
less training time) than the artificial neural networks with a single path-
modo. We also find that the required number of training samples and the
required training time increase quickly, and potentially exponentially,
when the number of objects in each image increases, and we suggest that
binding information from multiple objects simultaneously within any
rete (cortical area) induces conflict or competition and may be part
of the reason why our brain has limited attentional and visual working
memory capacities.
Calcolo neurale 35, 249–275 (2023)
https://doi.org/10.1162/neco_a_01559
© 2022 Istituto di Tecnologia del Massachussetts.
Pubblicato sotto Creative Commons
Attribuzione 4.0 Internazionale (CC BY 4.0) licenza.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
250
1 introduzione
Z. Han and A. Sereno
According to many neuropsychological, lesion, and anatomical studies, IL
human visual system has two major distinct cortical pathways (Felleman &
Essen, 1991; Mishkin, Ungerleider, & Macko, 1983; Ungerleider & Mishkin,
1982). The ventral pathway is concerned with object identity (Logothetis &
Sheinberg, 1996) and the dorsal pathway with spatial cognition (Colby &
Goldberg, 1999). Tuttavia, some recent studies argued that representations
associated with shape and location processing are present in both visual
streams (Konen & Kastner, 2008; Lehky & Sereno, 2007; Sereno & Lehky,
2011; Sereno, Lehky, & Sereno, 2020). In a previous study using artificial
neural networks (Han & Sereno, 2022UN), we showed that the two cortical
visual pathways for identity and space actively retained information about
both identity and space independently and differently. We also showed
that this independent and different retained information about identity and
space in the two modeled pathways was necessary to accurately and opti-
mally recognize and localize objects. One limitation of our previous study
was that there was only one object in each visual image, whereas in reality,
there may be multiple objects in a scene.
In our current study, we try to generalize our models to multiple objects’
recognition and localization tasks. One of the difficulties of dealing with
images with multiple objects is the binding problem, where the representa-
tion of multiple objects with independent feature sets can lose information
about which features belong to which objects (Markov, Utochkin, & Brady,
2021). Given that our previous study showed that the identity pathway ac-
tively retained information about space, we wanted to test whether it may
be possible to constrain the binding problem if we take advantage of this
informazione (cioè., the spatial information in the identity network pathway).
Our previous study also showed that the kinds of information that the net-
work actively retains depended on the tasks or goals that were used for
training the network. In our current study, we trained the identity network
pathway by asking it to report the identities of the objects in a certain order
that depends on the relative spatial relationships between objects in the im-
age. Di conseguenza, the identity network pathway would actively retain infor-
mation about the relative spatial relationships between objects. Asking the
identity network to retain relative spatial relationships is plausible because
previous physiological work has shown that cells in high-level ventral areas
retain spatial information of objects, including retinotopic spatial informa-
zione (Op De Beeck & Vogels, 2000; Sereno & Lehky, 2011) and angle of gaze
spatial information (Sereno, Sereno, & Lehky, 2014), as well as spatial re-
lationship among object parts (Yamane, Tsunoda, Matsumoto, Phillips, &
Tanifuji, 2006), information needed for scene recognition (where the objects
are part of a larger scene) and object recognition, rispettivamente. Inoltre,
even fMRI studies, with their poorer spatial resolution, have also demon-
strated that much of human neocortex contains topological maps of sensory
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Identifying and Localizing Multiple Objects
251
surfaces (Sereno, Sood, & Huang, 2022). In our prior work (Han & Sereno,
2022UN), we showed that the simulated ventral pathway needed information
about the relative spatial relationships between object parts to recognize the
identity of the whole object (see also the discussion of the spatial relation
of the faucet and basin of a sink in Figure 10b, in Sereno et al., 2020). Addi-
tionally, preliminary modeling results (Han & Sereno, 2022B) suggest that
information about the relative spatial relationships between objects is able
to constrain the binding problem when we combine the outputs of the iden-
tity network pathway and the spatial network pathway and process them
together using a two-pathway neural network.
Previous studies have used artificial neural networks trained with super-
vised learning, self-supervised learning, or unsupervised learning to sim-
ulate the ventral and dorsal cortical visual pathways in the brain (Yamins
et al., 2014; Kriegeskorte, 2015; Dobs, Martinez, Kell, & Kanwisher, 2022;
Konkle & Alvarez, 2022; Bakhtiari, Mineault, Lillicrap, Pack, & Richards,
2021; Zhuang et al., 2022). Many of these previous studies found that ar-
tificial convolutional neural network models could successfully produce
brain-like neural responses or even predict neural responses in the biologi-
cal visual cortex. Tuttavia, the main goal of our study is to gain a better un-
derstanding of the consequences of brain structure or segregated streams of
processing using computational modeling rather than identifying the spe-
cific response features that are similar to the real neural responses of ventral
and dorsal cortical pathways.
In our study, feedforward convolutional neural networks were used to
simulate the two cortical visual pathways. All neural networks in our study
were trained using supervised learning. When modeling the two corti-
cal visual pathways, it is assumed that the two pathways use the same
structure for simplicity and control. We trained the two neural networks
separately using multiple-objects recognition tasks and multiple-objects
localization tasks, rispettivamente, so that the trained neural networks will
be able to model the ventral and dorsal pathways, rispettivamente. We used
stochastic gradient descent with backpropagation to update the weights in
the neural networks during training. Stochastic gradient descent with back-
propagation is currently the best method for updating connection weights
between neurons in artificial neural networks, and some have argued that
the brain might be able to implement backpropagation-like effective synap-
tic updates (Lillicrap, Santoro, Marris, Akerman, & Hinton, 2020; Whitting-
ton & Bogacz, 2019).
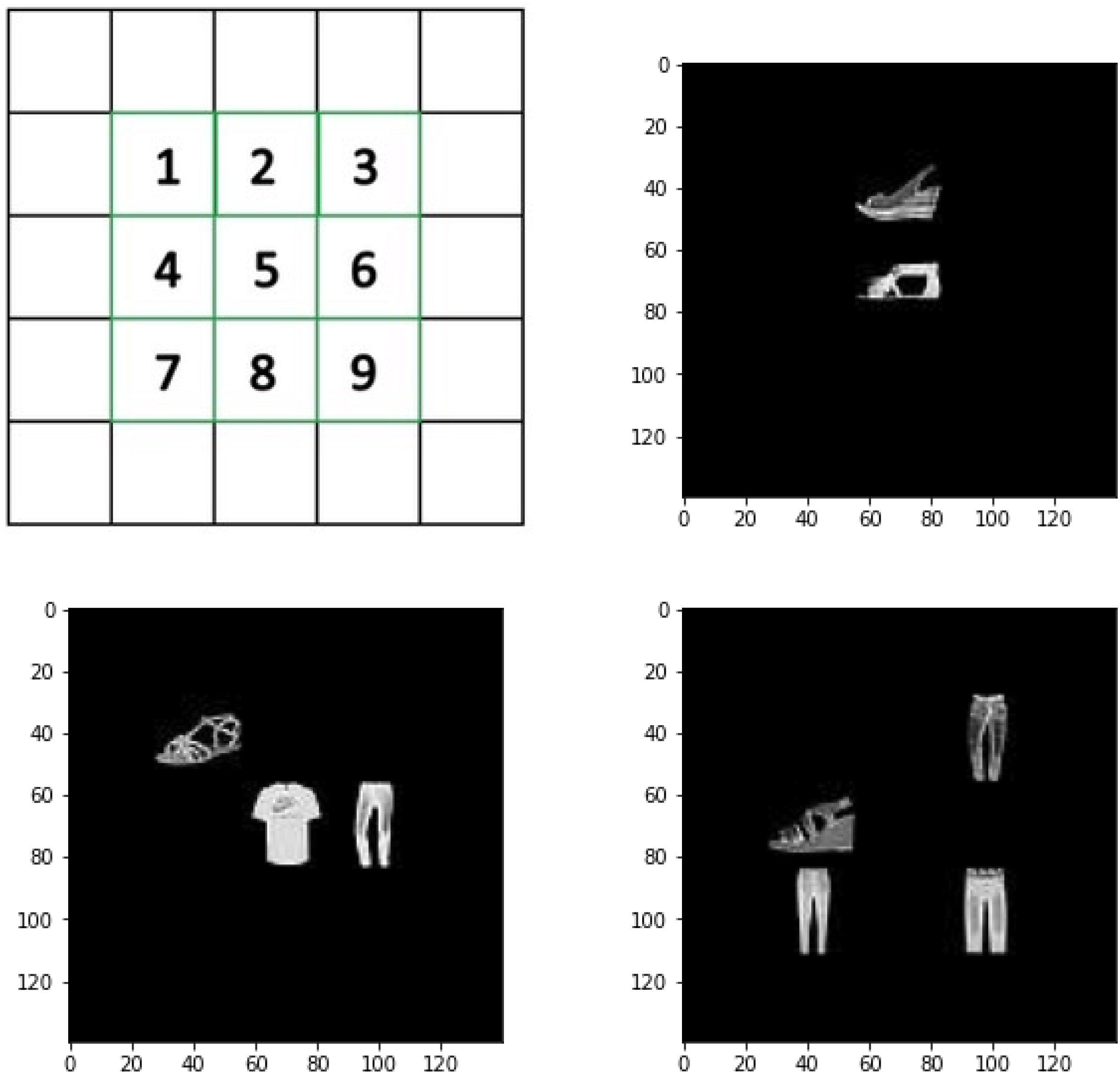
Black and white images consisting of different kinds of tops, pants, E
shoes (Xiao, Rasul, & Vollgraf, 2017) were used as the objects in the images
(Guarda la figura 1). Multiple objects were put in front of a black background at
one of the nine possible locations. These images with multiple objects were
used as visual inputs to the neural networks (see section 2 for details).
One artificial neural network, Networkidentity, was trained to do an iden-
tity task (to identify whether the objects are tops, pants, or shoes). Another
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
252
Z. Han and A. Sereno
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Figura 1: Possible object locations and examples of input images. (UN) Nine pos-
sible locations of the objects. (B) An example of an input image with two objects.
(C) An example of an input image with three objects. (D) An example of an input
image with four objects.
artificial neural network, Networklocation, was trained to do a localization task
(to determine the locations of the objects). Networkidentity was used to model
the ventral pathway, whereas Networklocation was used to model the dor-
sal pathway. These two networks were used to simulate the functions of
ventral and dorsal cortical visual pathways in the brain. Networkidentity and
Networklocation were trained independently to serve as the two pathways in
Networktwo pathways. The goal of Networktwo pathways is to recognize and local-
ize multiple objects in the image at the same time. For comparison, another
neural network, Networkone pathway, was also trained to recognize and localize
multiple objects in the image at the same time. The sizes of Networkone pathway
and Networktwo pathways are equal. The difference is that Networkone pathway has
only one pathway, and all the training occurs as a single network (the two
pathways in Networktwo pathways are trained as independent networks).
According to our simulation results, Networktwo pathways was able to out-
perform Networkone pathway in almost all experimental conditions (different
Identifying and Localizing Multiple Objects
253
numbers of objects in each image, different numbers of training samples).
Networktwo pathways was able to achieve significantly higher average testing
accuracy, had smaller testing accuracy variance, and required fewer train-
ing epochs and training time. Tuttavia, the required training samples and
training time increased quickly when the number of objects in each image
increased. Di conseguenza, neither of the two networks was able to efficiently
achieve high testing accuracies when there were four or more objects in
the image. Though it may be a limitation of our models, this phenomenon
may agree with the experimental evidence that shows our brain has a lim-
ited attention and working memory capacity for many cognitive processes,
such as the processes involved in visual perception tasks, digital span tasks,
and reading span tasks (Isbell, Fukuda, Neville, & Vogel, 2015; Mugnaio, 1956;
Daneman & Carpenter, 1980). Our models were not able to achieve high
performance when there were four or more objects in the image because the
binding problem became more difficult as the number of objects increased.
Therefore, we suggest that capacity limits may be in part a consequence of
the binding problem.
Similar to our previous study, our modeling is proof of the computational
concept and better understanding of the effects of different organizational
schemes more than an accurate model of the real human brain. Multiple-
objects recognition and localization tasks are very important in both cog-
nitive neuroscience and computer science. Our models may be able to help
people get a better understanding of the computational costs and benefits of
brain organization. Our models may also be able to provide insights about
how to find better, more efficient, and more biologically plausible multiple-
objects recognition and localization algorithms.
2 Methods
2.1 Objects. Black and white images of different kinds of tops, pants,
and shoes obtained from the data set Fashion-MNIST were used as the ob-
jects in the object recognition and localization tasks (Xiao et al., 2017). There
are 62 kinds of tops, 66 kinds of pants, E 58 kinds of shoes. Each object
image was embedded in a black background and presented at different lo-
cations. There may be two, three, or four objects in each black background
Immagine. These object images with black background were used as visual in-
puts. Some examples of these input images are shown in Figure 1.
These black and white images were used to train, validate, and test the
neural networks: two-thirds of the total number of images were used for
training, one-sixth of the total number of images were used for validating,
and one-sixth of the total number of images were used for testing.
2.2 Object Locations. Object image locations are shown and explained
in Figure 1. The objects were put at different locations in a 140 × 140 (pixels)
black square background. Specifically, each object image could have nine
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
254
Z. Han and A. Sereno
possible locations (see Figure 1a). The objects in the same visual image are
always at different locations, and they never overlap with each other.
2.3 Neural Networks. Feedforward convolutional neural networks
were used to build brain networks to model the two cortical visual path-
ways in the brain. Each neural network consists of several hidden layers, In-
cluding the convolutional layers, the pooling layers, and the fully connected
dense layers. ReLU activation function was used at each layer except the fi-
nal output layer, in which a softmax activation function was used. These
neural networks were implemented using TensorFlow and were trained
using supervised learning, the cross-entropy loss function, and stochastic
gradient descent with backpropagation.
Our primary goal in this study is not optimizing each artificial neural
network to achieve the highest performance. It is trying to compare the per-
formance of one-pathway and two-pathway artificial neural network archi-
tectures when they have the same hyperparameter settings. In our previous
study (Han & Sereno, 2022UN), we repeated some simulations with some dif-
ferent hyperparameter settings (per esempio., number of layers, number of filters,
filter sizes) in the artificial neural networks. We found that our findings do
not depend on specific hyperparameter settings of the artificial neural net-
works. Therefore, in our current study, we choose similar hyperparameter
settings that were used in our previous study.
A batch size of 256 and the Adam optimization method were used while
training. The initial learning rate of Adam optimization was 0.001. The other
hyperparameters are specified in Figures 2, 3, E 4. We applied 30% ran-
dom dropout to all the dense layers in all neural networks during training
for regularization. All networks were trained with enough epochs to ensure
that all of them had reached the highest possible validation accuracy at the
end of training.
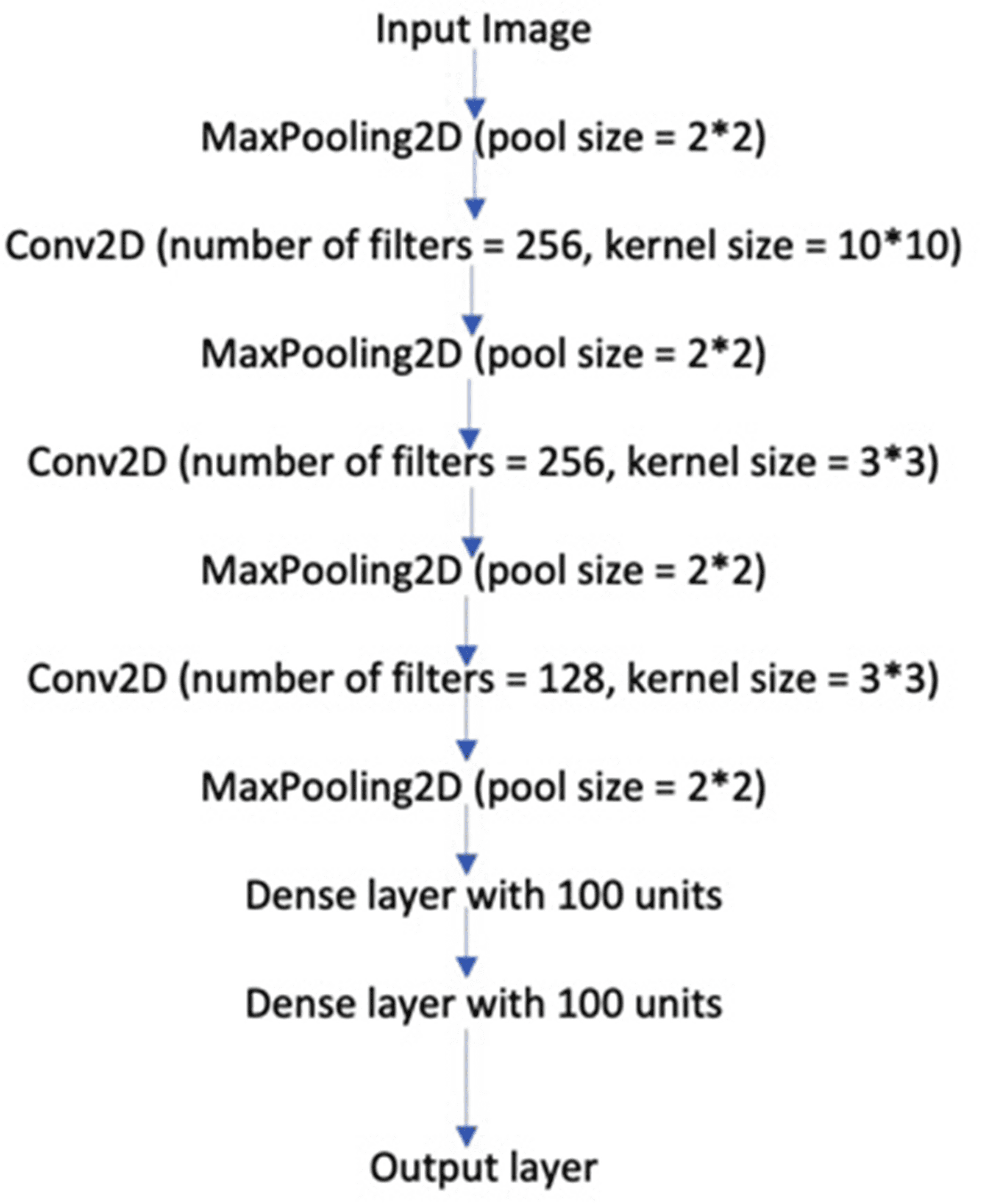
The structure of Networkidentity and Networklocation is shown in Figure 2.
These two neural networks share the same structure, and the only difference
between them was in their final output layers. Both networks take the same
set of images as inputs. Tuttavia, they were trained to do different tasks,
so their output layers have different sizes. These two neural networks were
trained to serve as the two pathways in Networktwo pathways for simultaneous
multiple-objects recognition and localization.
Networkidentity was trained to determine the identities of the objects (tops,
pants, or shoes) and report their identities according to their relative loca-
zioni. Specifically, it was trained to report the identities according to this
order: it should report the identity of the object at the top of the image first.
If two objects are at the same horizontal line, then it should report the iden-
tity of the object on the left first. Per esempio, when it receives the input
image shown in Figure 1c, it should report the identities of all the objects in
this order: shoe, top, pant. This information was represented in the output
layer of the network using one-hot encoding. Note that the specific order
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Identifying and Localizing Multiple Objects
255
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
Figura 2: The structure of Networkidentity and Networklocation.
described here is just an assumption without loss of generality: any partic-
ular (but consistent) spatial report would suffice. Generalmente, the only re-
quirement is that the one-hot vector representation in the final output layer
of Networkidentity is determined by both the identities of the objects and the
spatial relationships between the objects.
Networklocation was trained to determine the locations of the objects. It
should report the locations of all the objects in the image regardless of their
identities. Per esempio, when it receives the input image shown in Fig-
ure 1c, it should report the locations of all the objects: locations 1, 5, E
6. This information was also represented in the output layer of the network
using one-hot encoding.
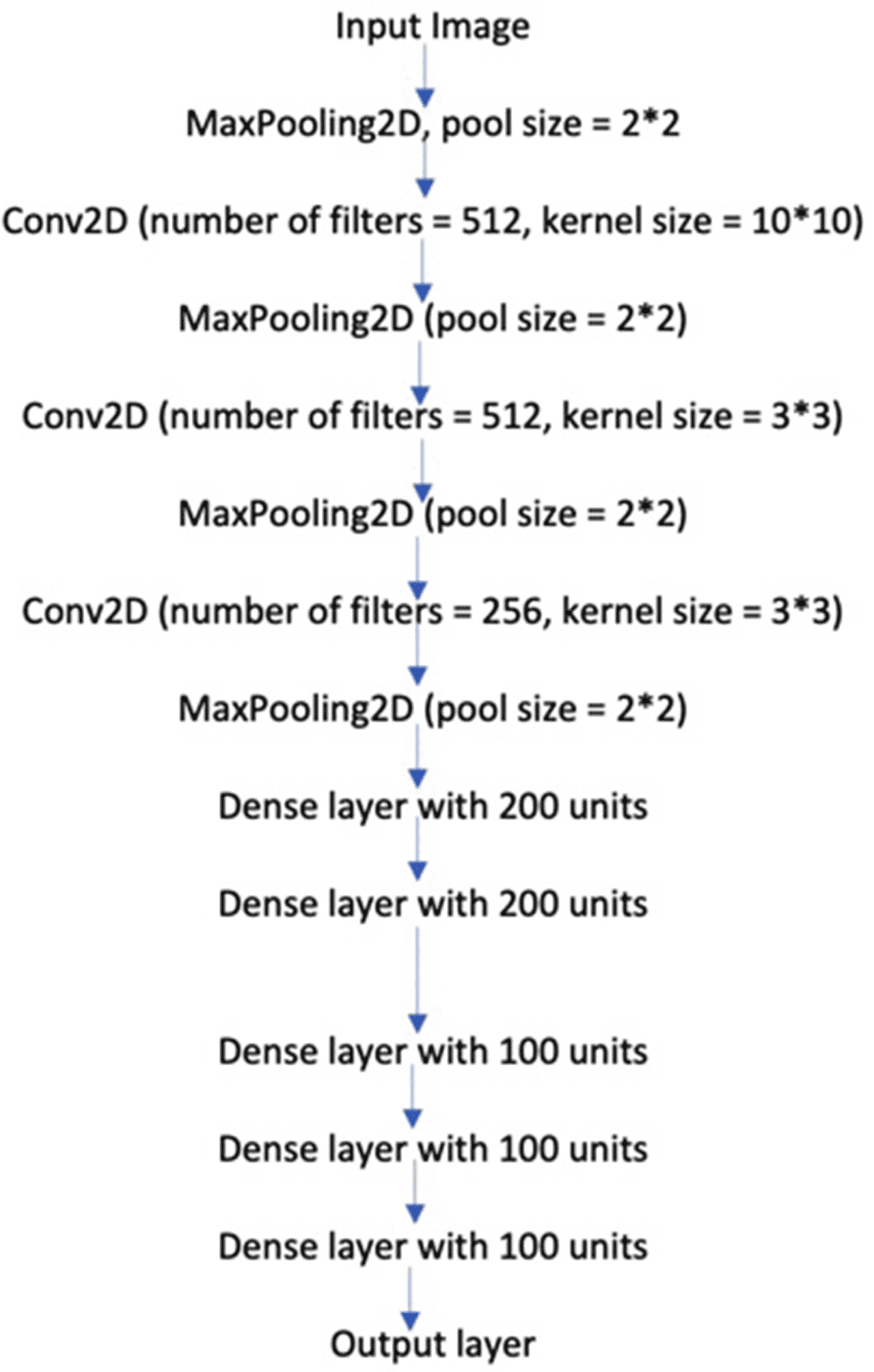
The structures of Networkone pathway and Networktwo pathways are shown in
Figures 3 E 4. The sizes of Networkone pathway and Networktwo pathways are
designed to be equal, which means they have the same number of layers,
the same total number of kernels in each convolutional layer, and the same
total number of units in each dense layer. We chose to keep the number of
units the same because our brain has a limited number of neurons, ma il
number of connections (the number of parameters) in our brain is more flex-
ible. The only difference between Networkone pathway and Networktwo pathways
is their architectures. Networkone pathway was trained to determine the
identities and locations of all the objects in each image simultaneously
using only one pathway. It took images as inputs, and the output layer
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
256
Z. Han and A. Sereno
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Figura 3: The structure of Networkone pathway.
reported the identities and locations of all the objects using one-hot en-
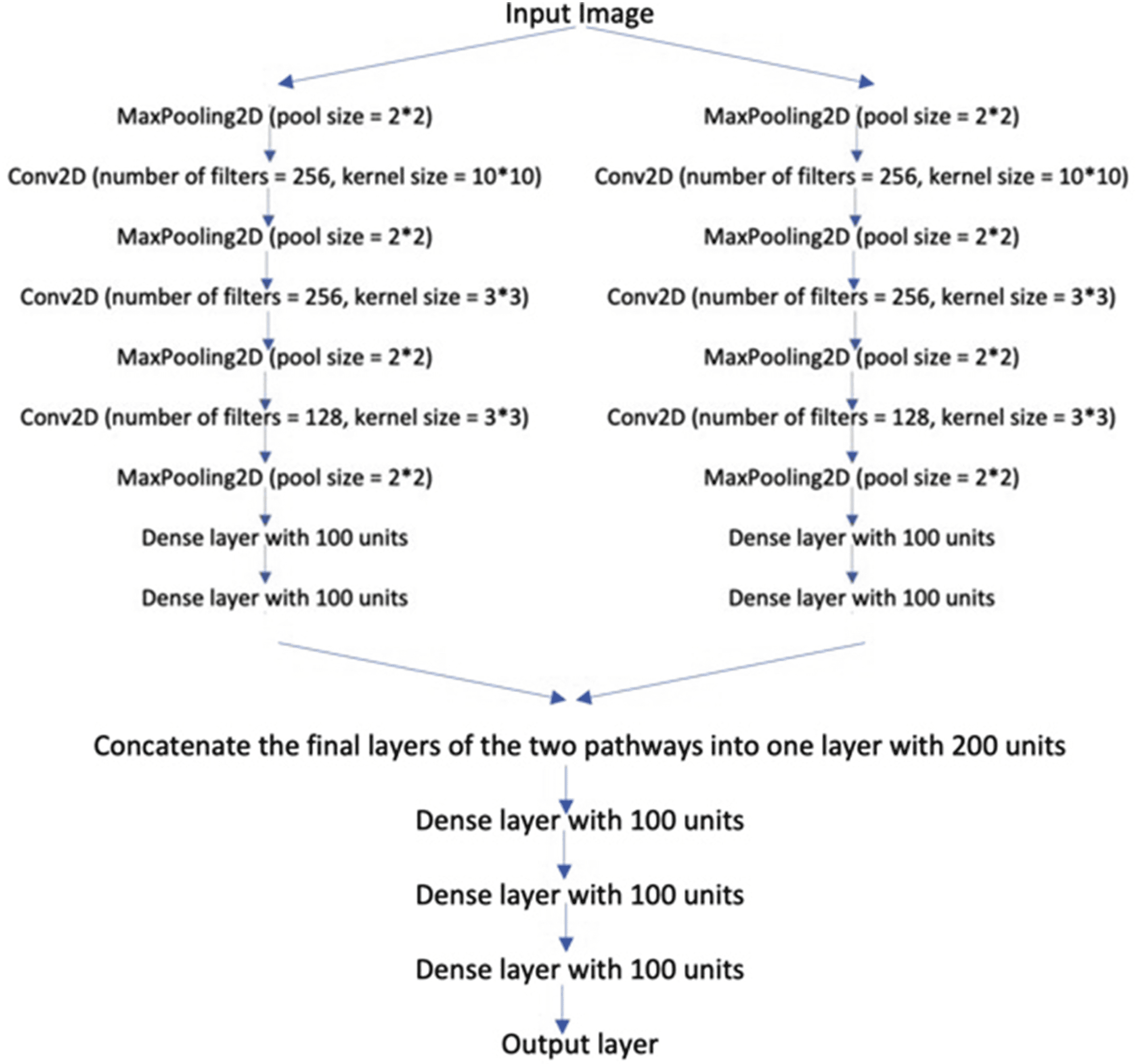
coding. Networktwo pathways was trained to determine the identities and
locations of all the objects in each image simultaneously by processing
the input image in two pathways and then combining them together. It
took the images as inputs and sent this information into two pathways.
The independently trained Networkidentity and Networklocation (excluding
their one-hot encoded output layers) were used as the two pathways in
Networktwo pathways, which processed the input images with the Networkidentity
pathway and the Networklocation pathways separately. Then the network
concatenated the final layers of the two pathways together and processed
the information jointly with some additional common dense layers. Dopo
the two pathways had been independently trained and their weights fixed,
the common dense layers in Networktwo pathways were trained to report the
identities and locations of all the objects using one-hot encoding.
Each network was trained five times, and testing accuracies were ob-
tained for each of the five training sessions. The testing accuracies were ob-
tained by dividing the number of correct classifications by the total number
Identifying and Localizing Multiple Objects
257
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Figura 4: The structure of Networktwo pathways.
of testing samples during the testing session. The accuracies that are used
to compare different networks in this letter are always referring to the test-
ing accuracies. Welch’s two-sample t-tests were used to compare network
accuracies and determine the significance of the differences.
3 Results
We performed training, validation, and testing multiple times for each net-
work with network weights randomly initialized differently each time.
When obtaining the accuracies in each experimental setting, the networks
were always trained five times, and five testing accuracies were obtained
for each condition after training. Welch’s two-sample t-tests were used
to compare different testing accuracies and determine the significance of
the differences. The difference between testing accuracies is considered
to be significant if the corresponding p-value <0.05. The average testing
258
Z. Han and A. Sereno
Table 1: Average Testing Accuracies in Percentage (%) ± Standard Deviations
(%) for Different Networks When There Are Two Objects in Each Image.
Number of Samples
Network
Networkidentity (chance level ≈ 11.1)
Networklocation (chance level ≈ 1.2)
Networktwo pathways (chance level ≈ 0.1)
Networkone pathway (chance level ≈ 0.1)
600
2400
6000
12,000
81.8 ± 2.2
100.0 ± 0.0
62.2 ± 2.2
61.6 ± 5.0
98.4 ± 0.2
100.0 ± 0.0
98.2 ± 0.1
97.8 ± 0.5
99.9 ± 0.1
100.0 ± 0.0
99.9 ± 0.1
99.9 ± 0.1
100.0 ± 0.0
100.0 ± 0.0
100.0 ± 0.0
100.0 ± 0.0
Notes: The row heading are the names of the networks. The column heading are the total
number of samples for training, validation, and testing. Networkidentity was trained to re-
port identities of all objects according to their relative locations. Networklocation was trained
to determine locations of all objects. Networktwo pathways and Networkone pathway were trained
to determine the identity and location of each object in the image. The chance-level accu-
racies (%) are reported next to the network names in the table.
accuracies of different neural networks for input images with two objects,
three objects, and four objects are shown in Tables 1, 2, and 3, respectively.
3.1 Two Objects. According to the results shown in Table 1, the testing
accuracies of Networklocation were always 100% for different total numbers
of samples. It may be because it is very easy to determine the locations of
all the objects when there are only two objects in each image. The testing
accuracies of all the other neural networks increased when the total num-
ber of samples increased. Though the difference between Networkone pathway
and Networktwo pathways average testing accuracies was small and not signif-
icant (p > 0.05), the standard deviations of Networktwo pathways were smaller
than or equal to the standard deviations of Networkone pathway. These results
indicate that the performance of Networktwo pathways was more stable than
Networkone pathway.
3.2 Three Objects. According to the results shown in Table 2, the test-
ing accuracy of Networklocation was 100% when the total number of sam-
ples used was 2400 or more. It may be because it is relatively easy to
determine the locations of all the objects when there are three objects in
each image. The testing accuracies of all the other neural networks in-
creased when the total number of samples increased. The difference be-
tween Networkone pathway and Networktwo pathways average testing accuracies
was significant (P < 0.05), and the standard deviations of Networktwo pathways
accuracies were smaller than the standard deviations of Networkone pathway
accuracies. These results indicate that the performance of Networktwo pathways
was higher than Networkone pathway and the performance of Networktwo pathways
was more stable than Networkone pathway.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
-
p
d
/
l
f
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
n
e
c
o
_
a
_
0
1
5
5
9
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Identifying and Localizing Multiple Objects
259
Table 2: Average Testing Accuracies in Percentage (%) ± Standard Deviations
(%) for Different Networks When There Are Three Objects in Each Image.
Number of Samples
Network
Networkidentity (chance level ≈ 3.7)
Networklocation (chance level ≈ 0.1)
Networktwo pathways (chance level ≈ 0.0)
Networkone pathway (chance level ≈ 0.0)
600
2400
6000
12,000
35.6 ± 2.6
97.0 ± 0.0
16.8 ± 1.5
12.2 ± 2.6
93.8 ± 0.8
100.0 ± 0.0
47.6 ± 0.3
29.6 ± 3.4
99.6 ± 0.3
100.0 ± 0.0
85.4 ± 0.1
63.7 ± 10.5
99.9 ± 0.1
100.0 ± 0.0
96.9 ± 0.0
91.3 ± 2.5
Notes: The row headings are the names of the networks. The column headings are the
total number of samples for training, validation, and testing. Networkidentity was trained
to report identities of all objects according to their relative locations. Networklocation was
trained to determine locations of all objects. Networktwo pathways and Networkone pathway were
trained to determine the identity and location of each object in the image. The chance-level
accuracies (%) are reported next to the network names in the table.
Table 3: Average Testing Accuracies in Percentage (%) ± Standard Deviations
(%) for Different Networks When There Are Four Objects in Each Image.
Number of Samples
Network
Networkidentity (chance level ≈ 1.2)
Networklocation (chance level ≈ 0.0)
Networktwo pathways (chance level ≈ 0.0)
Networkone pathway (chance level ≈ 0.0)
600
2400
6000
12,000
14.0 ± 3.0
99.0 ± 0.0
6.2 ± 0.8
3.6 ± 1.5
69.2 ± 1.1
100.0 ± 0.0
15.0 ± 0.5
3.8 ± 1.1
98.7 ± 0.8
100.0 ± 0.0
31.4 ± 0.1
5.1 ± 0.8
99.8 ± 0.1
100.0 ± 0.0
54.8 ± 0.1
14.8 ± 1.3
Notes: The row headings are the names of the networks. The column headings are the
total number of samples for training, validation, and testing. Networkidentity was trained
to report identities of all objects according to their relative locations. Networklocation was
trained to determine locations of all objects. Networktwo pathways and Networkone pathway were
trained to determine the identity and location of each object in the image. The chance-level
accuracies (%) are reported next to the network names in the table.
3.3 Four Objects. According to the results shown in Table 3, the test-
ing accuracy of Networklocation was 100% when the total number of samples
used was 2400 or more. It may be because it is still relatively easy to de-
termine the locations of all the objects when there are four objects in each
image. The testing accuracies of all the other neural networks increased
when the total number of samples increased. The difference between the
Networkone pathway and Networktwo pathways average testing accuracies was sig-
nificant (p < 0.05), and the standard deviations of Networktwo pathways accu-
racies were smaller than the standard deviations of Networkone pathway accu-
racies. These results indicate that the performance of Networktwo pathways was
higher than Networkone pathway, and the performance of Networktwo pathways was
more stable than Networkone pathway.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
-
p
d
/
l
f
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
n
e
c
o
_
a
_
0
1
5
5
9
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
260
Z. Han and A. Sereno
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
n
e
c
o
a
r
t
i
c
e
-
p
d
/
l
f
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
n
e
c
o
_
a
_
0
1
5
5
9
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
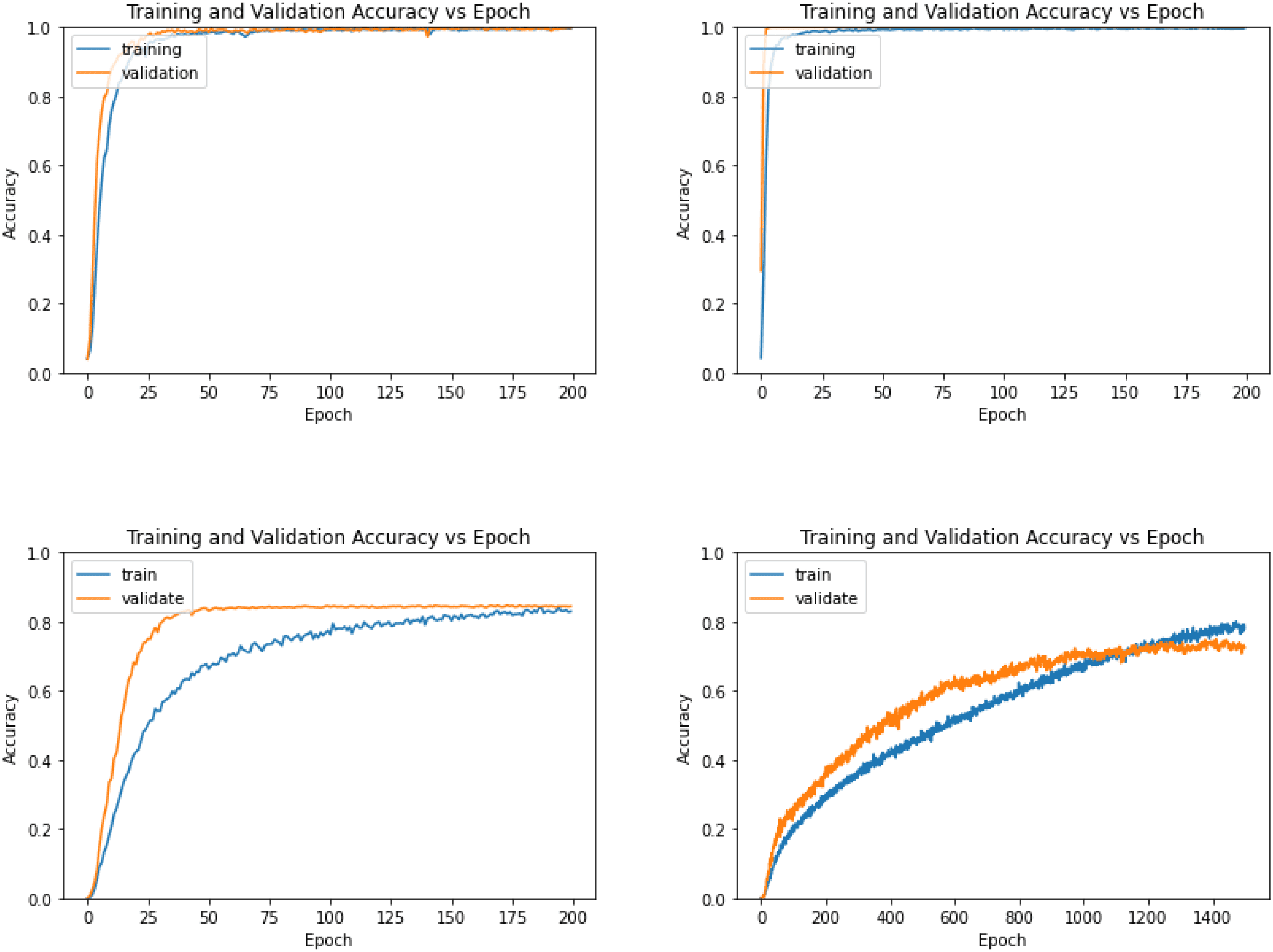
Figure 5: The training and validation curves of Networkone pathway and
Networktwo pathways with 6000 total samples and three objects in each image.
(a) The training and validation curves when training the identity pathway in
Networktwo pathways. (b) The training and validation curves when training the
location pathway in Networktwo pathways. (c) The training and validation curves
when training the common dense layers in Networktwo pathways. When training the
common dense layers, the two pathways had been trained and their weights
were fixed. (d) The training and validation curves of Networkone pathway (note that
the scale of the x-axis is greatly expanded in this panel: 1500 epochs, compared
to all other panels, 200 epochs).
3.4 The Number of Epochs and Time Required for Training
Networktwo pathways and Networkone pathway. According to the training and val-
idation curves shown in Figure 5, Networktwo pathways could achieve the
highest validation accuracy with fewer epochs. With three objects per im-
age and 6000 samples in total, training Networktwo pathways required only
around 100 epochs in total (see Figures 5a, 5b, and 5c), whereas training
Networkone pathway required around 1500 epochs (see Figure 5d; note that the
scale of the x-axis is greatly expanded in this panel, 1500 epochs, compared
to all other panels, 200 epochs). When determining the number of epochs
required to train Networktwo pathways, the number of epochs for training the
two pathways independently (in Figure 5a, around 40 epochs; in Figure 5b,
Identifying and Localizing Multiple Objects
261
around 10 epochs), and the number of epochs for training the common
dense layers (in Figure 5c, around 50 epochs) were added together to get
the number of epochs in total, around 100. The number of epochs required
for training is an estimation. It is the estimated number of epochs until the
validation accuracy no longer increases.
In addition, we measured the time spent during each training epoch ac-
cording to TensorFlow logs, which are automatically output when using the
model.fit command, and indicate the amount of time it took to train each
epoch. For Networktwo pathways, it took around 1 second per epoch to train
Networkidentity, around 1 second per epoch to train Networklocation, and less
than 1 second per epoch to train common dense layers. For Networkone pathway,
each training epoch took around 3 seconds. Therefore, each training epoch
in training Networktwo pathways (around or less than 1 s) always took much
less time than each training epoch in training Networkone pathway, which was
around 3 s). This finding may be because there are fewer weight parameters
that need to be updated in Networktwo pathways during training.
Because training Networktwo pathways required fewer epochs and each
training epoch took less time,
training time required for
the total
Networktwo pathways was shorter. These results about required number of train-
ing epochs and training time were obtained using three-object images and
6000 samples. Similar results were also found with different numbers of
objects and different numbers of samples.
the
3.5 Comparing
of Networktwo pathways
Performance
and
Networkone pathway. We compared the performance of Networktwo pathways
and Networkone pathway when there were different numbers of objects in
each image and when different total number of samples were used. The
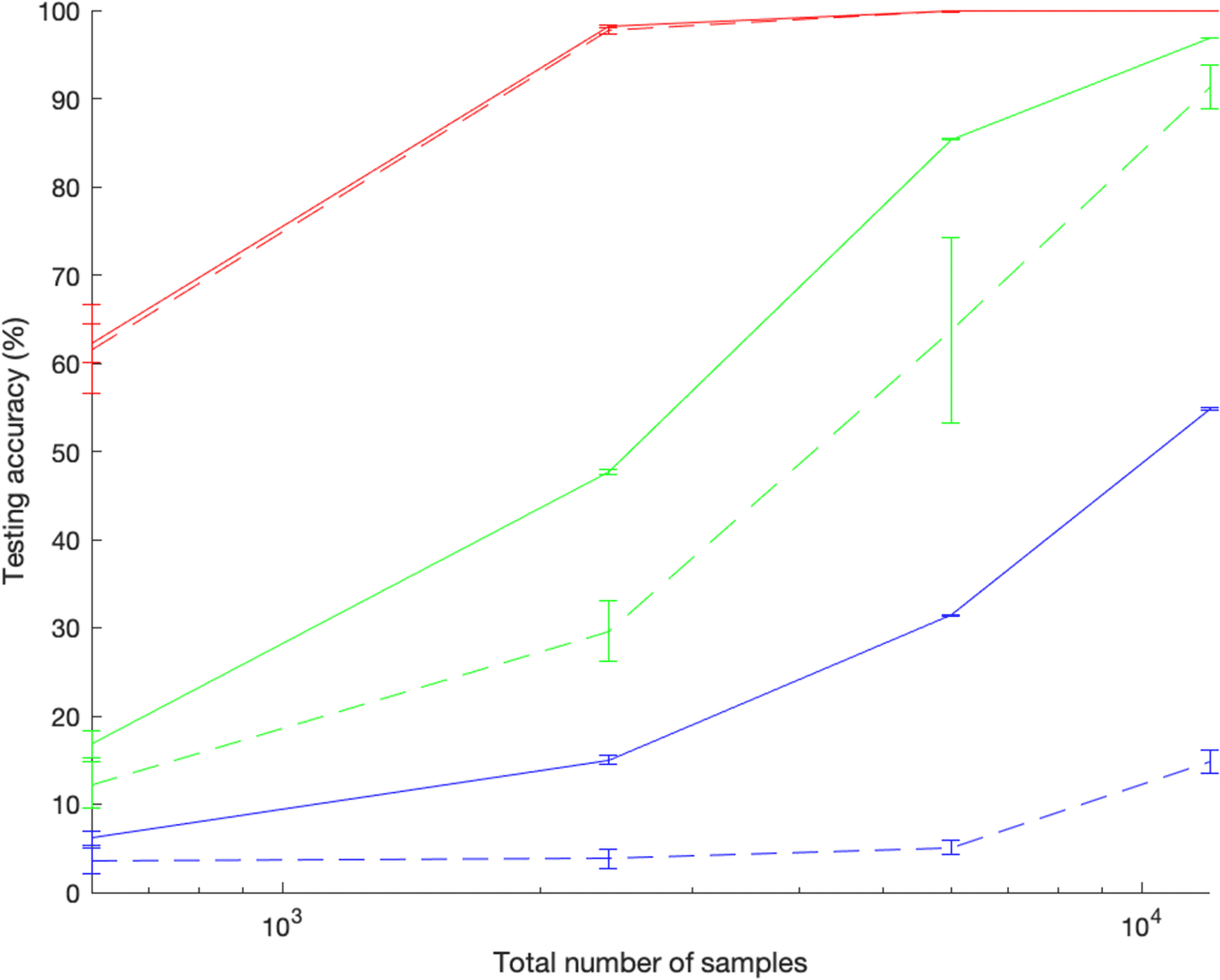
comparison is shown in Figure 6. Networktwo pathways had significantly better
performance (higher average testing accuracy with smaller variance) than
Networkone pathway in almost all conditions. The number of samples required
for both networks to reach high testing accuracy (>90%) increased when
the number of objects in each image increased. With two objects in each
Immagine, 2400 samples were sufficient for Networktwo pathways to reach a high
testing accuracy (>90%). With three objects in each image, Networktwo pathways
required 12,000 samples to achieve a similar high testing accuracy (>90%).
With four objects in each image, Networktwo pathways could reach only a much
lower testing accuracy (54.8 ± 0.1)% con 12,000 samples. As shown in
Tavolo 4, Networktwo pathways reached a similar high testing accuracy (>90%)
con 60,000 samples. Tuttavia, the training was slow and inefficient when
12,000 or more samples were used for training, validation, and testing.
Training was even slower and more inefficient when we increased the
total number of samples further. The same is true and even worse for
Networkone pathway. Therefore, we did not try to train the neural networks
with more samples for all conditions (but see section 3.10). In summary,
the required number of training samples and the required training time for
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
262
Z. Han and A. Sereno
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Figura 6: The testing accuracies of Networktwo pathways
(solid lines) E
Networkone pathway (dashed lines) for two objects (red), three objects (green),
and four objects (blue) images when the total numbers of samples used for
training, validation, and testing were 600, 2400, 6000, E 12,000.
high network performance increased quickly when the number of objects
in each image increased.
3.6 Compare the Performance of Networkone pathway with or without
Pretraining. The Networkone pathway results reported above were obtained
without any pretraining. In order to find out whether pretraining could
improve the performance of Networkone pathway, we conducted additional
simulations to test the performance of Networkone pathway with pretraining.
With three objects per image and 6000 samples in total, we pretrained
Networkone pathway with the identity task first and the location task later; IL
testing accuracy of Networkone pathway on the multiple-objects recognition and
localization task was (12.2 ± 8.9)%. We also pretrained Networkone pathway in
the other order, with the location task first and the identity task later. IL
testing accuracy of Networkone pathway in this case was (11.6 ± 10.2)%. The accu-
racies of Networkone pathway in both pretraining cases were significantly lower
than the accuracy of Networkone pathway without pretraining (63.7 ± 10.5)%.
Identifying and Localizing Multiple Objects
263
Tavolo 4: Average Testing Accuracies in Percentage (%) ± Standard Deviations
(%) for Networktwo pathways When There Are Two, Three, or Four Objects in Each
Image.
1200
2400
6000
12,000
30,000
60,000
Two objects
Three objects
Four objects
82.2 ± 0.61
NA3
NA3
98.2 ± 0.12
47.6 ± 0.3
15.0 ± 0.5
99.9 ± 0.1
85.4 ± 0.11
31.4 ± 0.1
100.0 ± 0.0
96.9 ± 0.02
54.8 ± 0.1
NA3
NA3
85.7 ± 0.11
NA3
NA3
98.1 ± 0.02
Notes: The row headings are the numbers of objects. The column headings are the total
number of samples for training, validation, and testing.
1The accuracies are between 82.2% E 85.7%.
2The accuracies are between 96.9% E 98.2%.
3The data for simulations that were not conducted.
3.7 Possible Reasons for the Underperformance of Networkone pathway.
In order to help elucidate a possible reason for the underperformance
of Networkone pathway, we used a decoder to decode information from the
second-to-last layer activities of the trained Networkone pathway. The decoder
was a multilayer perceptron with three hidden dense layers and 100 units
in each hidden layer. ReLU activation function was used at each layer in the
decoder except the final output layer, in which a softmax activation func-
tion was used. We used the second-to-last layer activities of the trained
Networkone pathway as inputs to the decoder and trained the decoder to do
either the identity task or the location task with three objects per image
E 6000 samples in total. The decoding accuracy for the identity task was
(66.7 ± 3.0)%, and the decoding accuracy for the location task was (91.2 ±
1.0)%. The decoding accuracy for the identity task was much lower than
that for the location task. Inoltre, the decoding accuracy for the iden-
tity task (66.7 ± 3.0)% was very close to the accuracy of Networkone pathway
on the object recognition and localization tasks (63.7 ± 10.5)% in the same
condition.
3.8 The Contribution of Each Pathway in the Performance of
Networktwo pathways. In order to examine the contribution of each pathway
in the performance of Networktwo pathways, we tested the performance of
Networktwo pathways after removing the identity pathway or location path-
modo, using three objects per image and 6000 samples in total. After re-
moving the location pathway and keeping only the identity pathway,
the testing accuracy of Networktwo pathways was (37.0 ± 1.9)%. After remov-
ing the identity pathway and keeping only the location pathway, IL
testing accuracy of Networktwo pathways was (4.6 ± 0.5)%. The accuracies of
Networktwo pathways in both cases were significantly lower than the accuracy
of Networktwo pathways when both pathways were present (85.4 ± 0.1)%. IL
accuracy of Networktwo pathways decreased more when the identity pathway
was removed.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
264
Z. Han and A. Sereno
3.9 The Contribution of Spatial Relation Information in Networkidentity
in Constraining the Binding Problem. In order to constrain the binding
problem, we asked Networkidentity to learn spatial relation information by
training it to report objects’ identities in a certain order. In order to test
whether the spatial relation information in Networkidentity contributed to per-
formance, we trained another identity network, Network(cid:3)
identity, and asked
this network to report the identities of all the objects regardless of the spa-
tial relations between these objects. Then we used the trained Network(cid:3)
identity
to be the identity pathway in Network(cid:3)
two pathways. It turned out that the testing
accuracy of this Network(cid:3)
two pathways was (76.7 ± 1.0)% when there were three
objects per image and 6000 samples in total, which was significantly lower
than the testing accuracy of the original Networktwo pathways (85.4 ± 0.1)% In
the same condition. Inoltre, Network(cid:3)
two pathways required more training
epochs (around 1000 epochs) than the original Networktwo pathways (around
100 epochs).
For comparison, we also trained Network(cid:3)
two pathways and the original
Networktwo pathways to do an object recognition and localization task without
binding. We only asked the networks to report all objects’ identities and
locations, but we did not require them to bind each object’s identity with
its location. The chance level accuracy for this task without binding and
the original task with binding is approximately 0%. We trained them with
three objects per image and 6000 samples in total. The testing accuracy of
Network(cid:3)
two pathways for this task was (98.2 ± 0.0)%, very close to the testing
accuracy of Networktwo pathways on the same task (98.3 ± 0.0)%. Inoltre,
both Network(cid:3)
two pathways and Networktwo pathways required around 100 epochs
to train.
3.10 The Accuracy of Networktwo pathways When the Number of Objects
Increased. According to the results shown in Tables 1, 2, E 3, and Fig-
ure 6, the accuracy of Networktwo pathways decreased when the number of ob-
jects increased with the same number of training samples. Tuttavia, IL
required number of samples is still unclear for Networktwo pathways to reach a
similar level of high accuracy when there are different numbers of objects.
It is hard to accurately estimate the required number of samples for
Networktwo pathways to reach the same accuracy in different conditions. There-
fore, in order to address this question, we conducted additional simulations
to estimate the required number of samples for Networktwo pathways to reach
similar high accuracies when there are two, three, or four objects. The re-
sults, shown in Table 4, suggest that Networktwo pathways required 1200, 6000,
O 30,000 samples to reach a similar relatively high accuracy (between 82.2%
E 85.7%) for two, three, or four objects, rispettivamente. Additionally, these
results also suggest that Networktwo pathways required 2400, 12,000, O 60,000
samples to reach a similar but even higher accuracy level (between 96.9%
E 98.2%) for two, three, or four objects, rispettivamente.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Identifying and Localizing Multiple Objects
265
Tavolo 5: Average Testing Accuracies in Percentage (%) ± Standard Deviations
(%) for the Modified Networktwo pathways When There Are Two, Three, or Four Ob-
jects in Each Image.
Remove One Convolutional Layer
Add One Convolutional Layer
1200
6000
30,000
1200
6000
30,000
Two objects
Three objects
Four objects
80.0 ± 0.7
NA
NA
NA
84.6 ± 0.3
NA
NA
NA
85.6 ± 0.1
85.5 ± 0.6
NA
NA
NA
85.6 ± 0.1
NA
NA
NA
85.8 ± 0.0
Notes: The row headings are the numbers of objects. The column headings are the total
number of samples for training, validation, and testing. The data in the first three columns
were obtained using modified Networktwo pathways with one convolutional layer removed
in each pathway. The data in the second three columns were obtained using modified
Networktwo pathways with one additional convolutional layer added in each pathway. IL
data for simulations that were not conducted are labeled “NA.”
In order to test whether our results are robust to hyperparameter
i cambiamenti, we repeated some simulations with different numbers of convolu-
tional layers. We either increased or decreased the number of these layers in
each pathway of Networktwo pathways. We increased the number of these lay-
ers by adding one additional convolutional layer in each pathway of the
original Networktwo pathways. The additional layer is the fourth convolutional
layer, and it has the same number of filters and the same kernel sizes as the
third convolutional layer in each pathway of the original Networktwo pathways.
We reduced the number of convolutional layers by removing the second
convolutional layer in each pathway of the original Networktwo pathways. Noi
repeated simulations using these modified Networktwo pathways under differ-
ent conditions, and the results are shown in Table 5.
3.11 Decreased Networktwo pathways Accuracy When the Number of Ob-
jects Increased: Role of Binding? It is possible that the decreased perfor-
mance of Networktwo pathways with increasing numbers of objects was partly
caused by a binding limitation. Tuttavia, because the testing accuracies of
Networkidentity also decreased when the number of objects increased, it is also
possible that the decreased performance of Networktwo pathways was caused
merely by the decreased performance of the identity pathway, and not by a
binding limitation.
To test this hypothesis, we trained the same original Networktwo pathways
to do the object recognition and localization task either with or with-
out binding. For the case without binding, we only asked the final com-
bined network to report all objects’ identities and all objects’ locations,
but we did not require the network to bind each object’s identity with its
location. We trained each Networktwo pathways with three objects per image
E 6000 samples in total. The chance-level accuracy for the task without
binding and the original task with binding is approximately 0%. IL
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
266
Z. Han and A. Sereno
testing accuracy of Networktwo pathways for the task without binding was
(98.3 ± 0.0)%, which was significantly higher than the testing accuracy of
Networktwo pathways with the original task that required binding (85.4 ± 0.1)%.
We also trained Networktwo pathways with four objects per image and 6000 sam-
ples in total. The chance-level accuracy for the task without binding and the
original task with binding is still approximately 0%. The testing accuracy of
Networktwo pathways for this task without binding was (89.3 ± 0.3)%, which was
also significantly higher than the testing accuracy of Networktwo pathways with
the original task that required binding (31.4 ± 0.1)%.
4 Discussion
One of the limitations of our previous study modeling the two cortical
visual pathways was that there was only one object in each input im-
age. Here, we sought to test whether our findings could be generalized
to multiple-object recognition and localization tasks. In our current study,
we found that the artificial neural networks with two pathways for iden-
tity and space have better performance in multiple-objects recognition and
localization tasks (higher average testing accuracy, lower testing accuracy
variance, less training time) than the artificial neural networks with a sin-
gle pathway. Additionally, we found that the required number of training
samples and the required training time increased quickly, and potentially
exponentially, when the number of objects in each image increased. We also
showed that the spatial relation information required in the training of our
Networkidentity to constrain the binding problem was critical and increased
the performance of Networktwo pathways. Finalmente, we showed that testing accu-
racies of Networktwo pathways increased after training to do an object recogni-
tion and localization task without binding, suggesting that binding limited
performance and may be a reason that our brain has limited attentional and
visual working memory capacities.
4.1 The Performance of Networktwo pathways Was Significantly Bet-
ter Than Networkone pathway. According to our
simulation results,
Networktwo pathways was able to outperform Networkone pathway
in almost
all conditions. These are fair comparisons because the two networks have
equal sizes, and we trained every network with enough epochs until it had
reached the highest possible validation accuracy. Networktwo pathways was
able to achieve higher average testing accuracy and lower testing accuracy
variance in most conditions. Further, Networktwo pathways was able to reach
the highest validation accuracy with less total training time. Therefore, our
simulation results suggest that two separate pathways are advantageous in
order to process the same visual information in different ways so that the
network could have better performance (higher average testing accuracy,
lower testing accuracy variance, less training time) in multiple-objects
recognition and localization tasks.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Identifying and Localizing Multiple Objects
267
We compared the performance of Networkone pathway with or without pre-
training. In the case of pretraining, we pretrained Networkone pathway with
the identity task and the location task. We found that the accuracy of
Networkone pathway with pretraining was significantly lower than the accu-
racy of Networkone pathway without pretraining. It may be because pretraining
caused Networkone pathway to be more likely to get stuck in local minima. These
findings show that pretraining Networkone pathway with the identity task and
the location task cannot improve the performance of this network. There-
fore, the better performance of Networktwo pathways cannot be explained by
pretraining. A one-pathway neural network is not optimal or efficient for
learning these two different specializations (multiple-objects recognition
and localization).
According to Dobs et al. (2022), a one-pathway neural network may be
sufficient for learning object recognition and face recognition tasks. How-
ever, in our study, the difference between the object recognition task and
the object localization task is larger than the difference between the object
recognition task and the face recognition task. Di conseguenza, it is likely more
difficult for a one-pathway neural network to find a common feature space
to solve both the object recognition task and the object localization task. Fur-
ther, we show here that the performance of a one-pathway neural network
is impaired in multiple-objects recognition and localization tasks compared
to a two-pathway neural network (lower average testing accuracy, higher
testing accuracy variance, more training time).
4.2 Possible Reasons for the Underperformance of Networkone pathway.
We used a decoder to decode identity and location information from the
second to last layer of the trained Networkone pathway with three objects per
image and 6000 samples in total. According to our simulations, the de-
coding accuracy for the identity task was much lower than the decoding
accuracy for the location task. It is important to note that with three ob-
jects per image and 6000 samples in total, Networkidentity and Networklocation
have very similar accuracies on the identity and location tasks, respec-
tively (Vedi la tabella 2). Further, the identity and location tasks also have
similar chance-level accuracies that are close to 0. Therefore, the find-
ings of much lower decoding accuracy for the identity task suggest that
Networkone pathway learned less identity information than location informa-
zione. Inoltre, the decoding accuracy for the identity task was very close
to the accuracy of Networkone pathway on the object recognition and localization
compiti. Therefore, these results suggest that one reason for the underperfor-
mance of Networkone pathway was that it was not able to learn enough identity
informazione.
4.3 The Contribution of Each Pathway in the Performance of
Networktwo pathways. According to our
the accuracy of
Networktwo pathways decreased significantly when the identity pathway
simulations,
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
268
Z. Han and A. Sereno
or the location pathway was removed. Inoltre, the accuracy of
Networktwo pathways decreased significantly more when the identity pathway
was removed. Therefore, both pathways contributed to the performance
of Networktwo pathways, and the identity pathway contributed more. È
possible the identity pathway contributed more because it included both
identity information and spatial relation information, whereas the location
pathway contained only spatial information. It is also likely the relative
contributions of each pathway may change with different task goals or task
progetto.
4.4 The Contribution of Spatial Relation Information in Networkidentity
in Constraining the Binding Problem. Previously, we showed that net-
works trained either for identity or location retained spatial information
(Han & Sereno, 2022UN). In some visual perception tasks, the goal of the task
may require coordination of the information from these separated path-
ways (per esempio., reaching for the object that is edible when multiple objects are
present). In these cases, processing information independently and dif-
ferently using multiple separate pathways may cause a binding problem
(Treisman, 1996). We suggested that the binding problem may be lessened
if we could take advantage of the spatial information contained in the iden-
tity network and object identity information in the spatial network. There-
fore, in our current study, we assume that the ventral pathway has access
to the relative spatial information of objects and try to constrain the bind-
ing problem in the following way. We trained Networkidentity by asking it to
report the identities of all the objects in each image in a certain order that
depends on the spatial relations between these objects. Note that we can
choose any consistent order as long as the one-hot vector representation
in the final output layer of Networkidentity is determined by both the identi-
ties of the objects and the spatial relationships between the objects. Because
the information retained by the neural networks depends on the training
task (Han & Sereno, 2022UN), this task would make Networkidentity not only
actively retain identities of the objects but also actively retain relative spa-
tial relationships between the objects. We trained Networklocation by asking
it to report the locations of all the objects in the image regardless of their
identities. Then we used these trained networks as the two separate path-
ways in Networktwo pathways. Therefore, Networktwo pathways should be able to
bind the identity of each object with its location by combining the iden-
tity information in Networkidentity, the relative spatial relation information in
Networkidentity, and the absolute location information without identities in
Networklocation. Our simulation results indicate that it is possible to constrain
the binding problem in this way.
In order to evaluate the effectiveness of this method, we trained another
identity network, Network(cid:3)
identity, and asked this network to report the iden-
tities of all the objects regardless of the spatial relations between these ob-
jects. Then we used the trained Network(cid:3)
identity to be the identity pathway in
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Identifying and Localizing Multiple Objects
269
Network(cid:3)
two pathways. According to our simulation results, the performance of
Network(cid:3)
two pathways was significantly lower than the testing accuracy of the
original Networktwo pathways in the same condition. These results suggest that
the spatial relation information in Networkidentity improved the performance
of the two-pathway neural network. Tuttavia, these findings do not estab-
lish whether this improvement was because the spatial relation information
in Networkidentity was important for constraining the binding problem. For
comparison, we also trained Network(cid:3)
two pathways (identity network trained
with no spatial relation information) and the original Networktwo pathways to
do an object recognition and localization task without binding. When bind-
ing is not required in the task, the differences in performance between the
two networks disappeared. The performance of Network(cid:3)
two pathways for this
task was almost the same as the performance of Networktwo pathways. Così,
these findings suggest that the spatial relation information retained in the
identity network is not important if the task does not require binding, Ma
when the task requires binding, it is critical in constraining the binding
problem.
An important assumption that we made was that the identity network
should be able to report object identities according to the relative spatial re-
lations between objects. This assumption is biologically plausible because
the ventral cortical visual pathway may have different neural representa-
tions when the relative spatial relations between the same set of objects are
different (Yamane et al., 2006). Sereno & Lehky (2011) report additional ex-
perimental evidence where they showed not only that the majority of cells
in late stages of the ventral pathway were spatially selective but also that it
was possible to decode object location from a small population of cells. Fur-
ther, they demonstrated that the recovered spatial representation was topo-
logically correct. Topologically correct spatial information indicates that the
information about relative spatial relations between objects is retained in
the ventral pathway.
4.5 The Accuracy of Networktwo pathways When the Number of Objects
Increased. According to Table 4, Networktwo pathways required 1200, 6000, O
30,000 samples to reach a similar relatively high accuracy (between 82.2%
E 85.7%) for two, three, or four objects, rispettivamente. Also, Tavolo 4 shows
that Networktwo pathways required 2400, 12,000, O 60,000 samples to reach a
similar but even higher accuracy (between 96.9% E 98.2%) for two, three,
or four objects, rispettivamente. Though these required number of samples for
Networktwo pathways to reach a similar high level of performance are just esti-
mates, these results suggest that the required number of samples increases
by around five times when the number of objects increases from two to
three. The required number of samples increases by another five times when
the number of objects increases from three to four. Training time for the
same Networktwo pathways is roughly proportional to the number of training
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
270
Z. Han and A. Sereno
samples, so training time rises in a similar way. It indicates that the required
number of samples and the required training time for Networktwo pathways to
reach a certain high accuracy increases quickly, and potentially exponen-
tially, when the number of objects increases.
Inoltre, the results shown in Tables 4 E 5 suggest that the accu-
racies of the original Networktwo pathways and the modified Networktwo pathways
with different numbers of convolutional layers in each pathway were very
similar when they were trained under the same conditions. The modified
Networktwo pathways with different numbers of convolutional layers in each
pathway still required 1200, 6000, O 30,000 samples to reach a similar rel-
atively high accuracy (between 80.0% E 85.8%) for two, three, or four
objects, rispettivamente. Together, these findings suggest that our results are
robust to hyperparameter changes.
4.6 The Limitation of Networktwo pathways When the Number of Ob-
jects Increases: Role of Binding? According to our simulations, our
Networktwo pathways model could not recognize and localize four or more ob-
jects efficiently. With four or more objects in each image, training with
Networktwo pathways was very slow and required many more training samples
if we wanted to achieve a high testing accuracy (>90%).
It is possible that the decreased performance of Networktwo pathways with
larger numbers of objects was caused by a decreased performance of the
identity pathway, not by a binding limitation. We conducted additional
simulations to test this hypothesis. According to our simulations, the test-
ing accuracy of Networktwo pathways for the object recognition and localization
tasks that did not require binding was significantly higher than the test-
ing accuracy of Networktwo pathways for the original task that required binding
for each of the three- and four-object conditions. Therefore, the decreased
performance of Networktwo pathways with larger numbers of objects cannot be
fully explained with a decreased performance of the identity pathway. IL
binding problem increased the difficulty of the task and caused the model
performance to decrease.
Though this increased difficulty with tasks that require binding may be
a limitation of our model, it may agree with the computational properties
of the biological brain. Our biological brain is also not good at recognizing
and localizing four or more objects in the scene at the same time. Accord-
ing to Isbell et al. (2015), the capacity limit of visual working memory is
about three simple objects in healthy young adults. Visual working mem-
ory capacity may be considered as the maximum number of objects that our
brain could recognize and localize at the same time. This agrees with our
findings. Our Networktwo pathways was also only able to achieve high testing
accuracy (>90%) within a reasonable training time and training samples if
the number of objects in each image was less than or equal to three. There-
fore, we argue that our visual working memory capacity may be limited in
part by the binding problem. Other kinds of attention and working memory
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Identifying and Localizing Multiple Objects
271
capacity may also be limited by the binding problem. Many memory span
tasks that are used to measure working memory capacity require people to
remember the occurrence of information in space and time (Tulving, 1972;
Nairne, 2015). Combining the information with its occurrence in space and
time is also often referred to as a binding problem, and some researchers
have proposed that working memory is a system for building, maintain-
ing, and updating different kinds of bindings (Oberauer, 2009).
If the brain needs to recognize and localize four or more objects, then we
speculate that it could only do it sequentially. Per esempio, Quirk, Adam,
and Vogel (2020) found that the human visual working memory capacity in-
creased for both simple and real-world objects when encoding times were
longer. Their experimental tasks required participants to recognize and lo-
calize multiple objects during the encoding time and make a response about
which object appeared at a certain location during the testing time. In our
opinion, one possible explanation of their findings is that the brain is able to
bind more objects’ identities and locations sequentially when the encoding
time is longer. Di conseguenza, the brain can recognize and localize more objects,
so the visual working memory capacity may appear to increase.
Experimental evidence also suggests that visual working memory con-
tinues to develop throughout adolescence, and it does not reach adult
levels even in 16-year-old participants (Isbell et al., 2015). It may be be-
cause multiple-objects recognition and localization requires a lot of train-
ing samples and training time. It also agrees with our findings because our
Networktwo pathways model also required a relatively large number of train-
ing samples and training time to achieve a high testing accuracy (>90%)
with three objects in each image. There are many possible combinations
of the same information in different ways. Inoltre, in the real world,
learning conditions are complex and changing. Per esempio, context itself
may alter the meaning of the same information (an empty pot on a stove,
with the stove on versus off). Finalmente, our contexts and environments are
themselves changing over time. Così, there should be some improvements
in working memory capacities with training time on context-appropriate
sets. Tuttavia, visual working memory capacity cannot be improved in-
definitely through training, likely because our life and experience (training
samples) are limited, as well as the fact that the greatest developmental ben-
efits of the human brain occur before adulthood.
If our visual working memory capacity is limited in part by the bind-
ing problem, then we speculate that the measured visual working memory
capacity may increase if we ask the participants to report all objects’ iden-
tities regardless of their locations, and/or ask them to report all objects’
locations regardless of their identities. Inoltre, human visual working
memory capacity should be continuously developing in a long period (from
infancy to adulthood) and be dependent in part on stimulus and context-
appropriate training. Human visual working memory capacity should in-
crease relatively quickly at the beginning when the capacity is low and
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
272
Z. Han and A. Sereno
increase relatively slower later when the capacity is high and the individ-
ual is nearing nervous system limits. There may not be a hard limit for the
maximum possible visual working memory capacity. Tuttavia, there may
be a soft limit because the difficulty of increasing the visual working mem-
ory capacity further should increase quickly, and potentially exponentially,
when the capacity increases.
Though both our two-pathway model and human brains are not good at
recognizing and localizing four or more objects at the same time, more re-
search is needed to find out how different computational resources, hyper-
parameter settings, and learning types could affect this limit. Our current
study suggests that the human visual working memory capacity may be
limited in part by the binding problem, but our study does not suggest this
limit must be three or any other specific critical number. According to some
previous studies, human visual working memory capacity varies across in-
dividuals and groups (Luck & Vogel, 2013). The individual differences in
working memory capacity may be caused by different hyperparameter set-
tings in human brains (per esempio., number of neurons, number of connections be-
tween neurons). Some previous studies argue that it would be biologically
expensive for the brain to have a larger working memory capacity (Cowan,
2010). Inoltre, we have shown that the required training time and the
number of samples for high neural network performance increased quickly
as the number of objects increased. These findings suggest that the indi-
vidual differences in terms of visual working memory capacity may exist
but may not be very large. Therefore, there seem to be fairly standard num-
bers (three or four) for the limit of human visual working memory capacity
(Luck & Vogel, 2013).
Using a computational modeling approach, we aimed to better under-
stand whether the presence of the two separate cortical visual pathways in
the brain is important for object recognition and localization when there are
multiple objects in the scene. Our simulations using convolutional neural
networks used simple tasks, and we ignored a lot of details of real biological
neural networks. These simplifications are necessary to make direct compu-
tational comparisons possible. Our claims concern whether there could be
a computational advantage for retaining information independently and
differently in multiple pathways and whether this computational advan-
tage could increase the network performance in multiple-objects recogni-
tion and localization tasks. A previous simulation study of one-pathway
and two-pathway artificial neural networks compared model simulations
with actual neural representations in the brain (Bakhtiari et al., 2021). They
reported that their two-pathway artificial neural network models could
produce better matches to the representations in the mouse ventral and dor-
sal visual streams than their one-pathway artificial neural network models.
Though our intent with simulations was to explore the computational con-
sequences of multiple streams architecture rather than emulate physiolog-
ical conditions of the brain, interestingly our findings generally agree with
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Identifying and Localizing Multiple Objects
273
this study, which considered actual neural activities in the brain. The brain
is a complex organ, sometimes described as the last frontier, and it is clear
that computational approaches can play a key role, including in elucidating
consequences of its organization and function.
5 Conclusione
In summary, our simulations show that our models are able to accurately
and simultaneously recognize and localize multiple objects in a scene. Fur-
thermore, we show that the artificial neural networks with two pathways
for identity and space have significantly better performance (higher aver-
age testing accuracy, lower testing accuracy variance, less training time)
than the artificial neural networks with a single pathway in multiple-objects
recognition and localization tasks. We also find that the required number of
training samples and the required training time increased quickly, and po-
tentially exponentially, when the number of objects in each image increased.
The simulations suggest that the difficulty of binding identity and spatial in-
formation increases quickly, and potentially exponentially, when the num-
ber of objects increases. We suggest that binding information from multiple
segregated pathways may be a reason that our brain has a limited visual
working memory capacity. Given that attention and working memory re-
quire binding information with space or time, it is possible that many atten-
tional and working memory capacities are also limited by similar binding
problems.
Ringraziamenti
This work was partially supported by funds from Purdue University to A.S.
Riferimenti
Bakhtiari, S., Mineault, P., Lillicrap, T., Pack, C., & Richards, B. (2021). The functional
specialization of visual cortex emerges from training parallel pathways with self-
supervised predictive learning. In M. Ranzato, UN. Beygelzimer, K. Nguyen, P. S.
Liang, J. W. Vaughan, & Y. Dauphin (Eds.), Advances in neural information process-
ing systems, 34 (pag. 25164–25178) Curran.
Colby, C. L., & Goldberg, M. E. (1999). Space and attention in parietal cortex. Annual
Review of Neuroscience, 22, 319–349. 10.1146/annurev.neuro.22.1.319
Cowan, N. (2010). The magical mystery four: How is working memory capac-
ity limited, and why? Current Directions in Psychological Science, 19(1), 51–57.
10.1177/0963721409359277
Daneman, M., & Carpenter, P. UN. (1980). Individual differences in working memory
and reading. Journal of Verbal Learning and Verbal Behavior, 19(4), 450–466. 10.1016/
S0022-5371(80)90312-6
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
274
Z. Han and A. Sereno
Dobs, K., Martinez, J., Kell, UN. J. E., & Kanwisher, N. (2022). Brain-like functional
specialization emerges spontaneously in deep neural networks. Science Advances,
8(11), 1–11. 10.1126/sciadv.abl8913
Felleman, D., & Essen, D. V. (1991). Distributed hierarchical processing in the primate
cerebral cortex. Cerebral Cortex, 1(1), 1–47. 10.1093/cercor/1.1.1
Han, Z., & Sereno, UN. (2022UN). Modeling the ventral and dorsal cortical visual
pathways using artificial neural networks. Calcolo neurale, 34(1), 138–171.
10.1162/neco_a_01456
Han, Z., & Sereno, UN. (2022B). Identifying and localizing multiple objects using ar-
tificial ventral and dorsal visual cortical pathways. Computational and Mathemati-
cal Models in Vision. Retrieved from https://docs.lib.purdue.edu/modvis/2022/
session01/3/
Isbell, E., Fukuda, K., Neville, H. J., & Vogel, E. K. (2015). Visual working mem-
ory continues to develop through adolescence. Frontiers in Psychology, 6, 1–10.
10.3389/fpsyg.2015.00696
Konen, C. S., & Kastner, S. (2008). Two hierarchically organized neural systems for
object information in human visual cortex. Nature Neuroscience, 11(2), 224–231.
10.1038/nn2036
Konkle, T., & Alvarez, G. UN. (2022). A self-supervised domain-general learning
framework for human ventral stream representation. Nature Communication,
13(493), 1–12. 10.1038/s41467-022-28091-4
Kriegeskorte, N. (2015). Deep neural networks: A new framework for modeling bi-
ological vision and brain information processing. Annual Review of Vision Science,
1, 417–446. 10.1146/annurev-vision-082114-035447
Lehky, S. R., & Sereno, UN. B. (2007). Comparison of shape encoding in primate dorsal
and ventral visual pathways. Journal of Neurology, Neurosurgery, and Psychiatry, 97,
307–319. 10.1152/jn.00168.2006
Lillicrap, T. P., Santoro, A., Marris, L., Akerman, C. J., & Hinton, G. (2020). Back-
propagation and the brain. Nature Reviews Neuroscience, 21, 335–346. 10.1038/
s41583-020-0277-3
Logothetis, N. K., & Sheinberg, D. l. (1996). Visual object recognition. Annual Review
of Neuroscience, 19, 577–621. 10.1146/annurev.ne.19.030196.003045
Luck, S. J., & Vogel, E. K. (2013). Visual working memory capacity: From psy-
chophysics and neurobiology to individual differences. Trends in Cognitive Sci-
enze, 17(8), 391–400. 10.1016/j.tics.2013.06.006
Markov, Y. A., Utochkin, IO. S., & Brady, T. F. (2021). Real-world objects are not stored
in holistic representations in visual working memory. Journal of Vision, 21(3), 1–24.
10.1167/jov.21.3.18
Mugnaio, G. UN. (1956). The magical number seven plus or minus two: Some limits
on our capacity for processing information. Psychological Review, 63(2), 81–97.
10.1037/h0043158
Mishkin, M., Ungerleider, l. G., & Macko, K. UN. (1983). Object vision and spa-
tial vision: Two cortical pathways. Trends in Neurosciences, 6, 414–417. 10.1016/
0166-2236(83)90190-X
Nairne, J. S. (2015). The three “ws” of episodic memory: Che cosa, Quando, and where.
American Journal of Psychology, 128(2), 267–279. 10.5406/amerjpsyc.128.2.0267
Oberauer, K. (2009). Design for a working memory. Psychology of Learning and Moti-
vation, 51, 45–100. 10.1016/S0079-7421(09)51002-X
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Identifying and Localizing Multiple Objects
275
Op De Beeck, H., & Vogels, R. (2000). Spatial sensitivity of macaque inferi-
ortemporal neurons. Journal of Comparative Neurology, 426, 505–518. 10.1002/
1096-9861(20001030)426:4(cid:4)505::aid-cne1(cid:5)3.0.co;2-M
Quirk, C., Adam, K. C., & Vogel, E. K. (2020). No evidence for an object working
memory capacity benefit with extended viewing time. eNeuro, 7(5), 1–13. 10.1523/
ENEURO.0150-20.2020
Sereno, UN. B., & Lehky, S. R. (2011). Population coding of visual space: Comparison of
spatial representations in dorsal and ventral pathways. Frontiers in Computational
Neuroscience, 4(159), 1–16. 10.3389/fncom.2010.00159
Sereno, UN. B., Lehky, S. R., & Sereno, M. E. (2020). Representation of shape, spazio,
and attention in monkey cortex. Cortex, 122, 40–60. 10.1016/j.cortex.2019.06.005
Sereno, UN. B., Sereno, M. E., & Lehky, S. R. (2014). Recovering stimulus locations
using populations of eye-position modulated neurons in dorsal and ventral vi-
sual streams of non-human primates. Frontiers in Integrative Neuroscience, 8, 1–20.
10.3389/fnint.2014.00028
Sereno, M. I., Sood, M. R., & Huang, R.-S. (2022). Topological maps and brain com-
putations from low to high. Frontiers in Systems Neuroscience, 16, 1–22. 10.3389/
fnsys.2022.787737
Treisman, UN. (1996). The binding problem. Current Opinion in Neurobiology, 6(2), 171–
178. 10.1016/S0959-4388(96)80070-5
Tulving, E. (1972). Episodic and semantic memory. In E. Tulving & W. Donaldson
(Eds.), Organization of memory (pag. 381–403). Academic Press.
Ungerleider L. G., & Mishkin, M. (1982). Two cortical visual systems. In M. Goodale,
D. J. Ingle, & R. J. W. Mansfield (Eds.), Analysis of visual behavior (pag. 549–586).
CON Premere.
Whittington, J. C., & Bogacz, R. (2019). Theories of error back-propagation in the
brain. Trends in Cognitive Sciences, 23(3), 235–250. 10.1016/j.tics.2018.12.005
Xiao, H., Rasul, K., & Vollgraf, R. (2017). Fashion-MNIST: A novel image dataset for
benchmarking machine learning algorithms. arXiv:1708.07747
Yamane, Y., Tsunoda, K., Matsumoto, M., Phillips, UN. N., & Tanifuji, M. (2006).
Representation of the spatial relationship among object parts by neurons
in macaque inferotemporal cortex. Journal of Neurophysiology, 96, 3147–3156.
10.1152/jn.01224.2005
Yamins, D. l. K., Hong, H., Cadieu, C. F., Solomon, E. A., Seibert, D., & DiCarlo, J.
J. (2014). Performance-optimized hierarchical models predict neural responses in
higher visual cortex. PNAS, 111(23), 8619–8624. 10.1073/pnas.1403112111
Zhuang, C., Yan, S., Nayebi, A., Schrimpf, M., Frank, M. C., DiCarlo, J. J., & Yamins,
D. l. K. (2022). Unsupervised neural network models of the ventral visual stream.
PNAS, 118(3), 1–11. 10.1073/pnas.2014196118
Received June 20, 2022; accepted October 9, 2022.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
/
e
D
tu
N
e
C
o
UN
R
T
io
C
e
–
P
D
/
l
F
/
/
/
/
3
5
2
2
4
9
2
0
6
7
6
8
3
N
e
C
o
_
UN
_
0
1
5
5
9
P
D
.
/
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3