Learning End-to-End Goal-Oriented Dialog with Maximal User Task
Success and Minimal Human Agent Use
Janarthanan Rajendran†∗,
Jatin Ganhotra‡, and Lazaros C. Polymenakos‡
†University of Michigan
‡IBM Research
rjana@umich.edu, jatinganhotra@us.ibm.com, and lcpolyme@us.ibm.com
Astratto
Neural end-to-end goal-oriented dialog sys-
tems showed promise to reduce the workload
of human agents for customer service, COME
well as reduce wait time for users. Tuttavia,
their inability to handle new user behavior
at deployment has limited their usage in real
mondo. In this work, we propose an end-to-
end trainable method for neural goal-oriented
dialog systems that handles new user behaviors
at deployment by transferring the dialog to
intelligently. The proposed
a human agent
method has three goals: 1) maximize user’s
task success by transferring to human agents,
2) minimize the load on the human agents by
transferring to them only when it is essential,
E 3) learn online from the human agent’s
responses to reduce human agents’ load fur-
ther. We evaluate our proposed method on a
modified-bAbI dialog task,1 which simulates
the scenario of new user behaviors occurring
at test time. Experimental results show that our
proposed method is effective in achieving the
desired goals.
1
introduzione
restaurant
Neural end-to-end dialog systems showed huge
potential for various goal-oriented dialog tasks
ad esempio
ticket
booking, and hotel reservation. Tuttavia, their
use in the real world has been limited because
of their inability to handle new user behavior
at deployment.
reservation,
flight
There are two main methods to build neural
end-to-end goal-oriented dialog systems. Nel
∗This work was done when the author was an intern at
IBM Research, NY.
1modified-bAbI dialog tasks – https://github.
com/IBM/modified-bAbI-dialog-tasks.
375
first method, large amounts of human–human chat
logs of a particular task are collected and then the
dialog system is trained to mimic the chat logs
using Supervised Learning (SL) (Bordes et al.,
2017). In the second method, the dialog system
is trained to complete the task against a human
(user) simulator (Young et al., 2013). The training
is done using Reinforcement Learning (RL) by
providing reward for task completion and also
intermediate rewards for pre-identified subtask
completion. This is often accompanied by a SL
pre-training, as in Liu and Lane (2017).
Dialog systems built using either of these
methods would fail in the presence of new user
behaviors during deployment, which were missing
in training. Failure here refers to the inability of
the dialog system to complete the task for the user.
The new behaviors can be a different way of a
user asking/providing certain information or could
also be as simple as an user utterance with out-
of-vocabulary words. The failure happens when
these new behaviors are beyond the generalization
capabilities of the trained systems due to the
limited coverage of training data collected. For a
real-world use-case, it is difficult to collect chat
logs and/or to build a user simulator that covers all
possible user behaviors, which implies that users
with new behaviors are bound to come by during
deployment. The new user behaviors that we refer
to and focus here are only those that are valid and
acceptable, questo è, these user behaviors should
ideally have been part of the training data (chat
logs in the case of SL and user simulator behavior
pattern in the case of RL).
For an enterprise that uses this dialog sys-
tem, these failures could affect their business
directly. In addition to losing customers who
the enterprise also loses
faced these failures,
future users/customers, as it also affects the per-
ceived reliability of the dialog system and, hence,
Operazioni dell'Associazione per la Linguistica Computazionale, vol. 7, pag. 375–386, 2019. Redattore di azioni: James Henderson.
Lotto di invio: 11/2018; Lotto di revisione: 2/2019; Pubblicato 7/2019.
C(cid:3) 2019 Associazione per la Linguistica Computazionale. Distribuito sotto CC-BY 4.0 licenza.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
the enterprise’s reputation. Although the dia-
log system fails for new user behaviors, it can
perform the task well for majority of user be-
haviors. Tuttavia, these failures have restricted
the deployment of neural end-to-end goal-oriented
dialog systems and have forced the enterprises
to rely completely on human agents or other
systems.
There has been recent work on using using user
feedback (Liu and Lane, 2017) and active human
teaching (Liu et al., 2018) during deployment
to improve robustness to new user behaviors.
Although they have produced better systems, Essi
are not good enough to be deployed in the real
mondo. In this work, we propose a method that can
be used in addition to the aforementioned ideas
and enables a dialog system to perform well in the
real world.
We propose an end-to-end trainable method,
in which the dialog system can automatically
identify a new user behavior during deployment
that the system might fail at and transfer the task
to a human agent, such that the user’s task is
completed without any issue. Allo stesso tempo,
the dialog system also learns from the human
agent’s response to handle that new user behavior
in future. Our method also allows one to choose
the trade-off between maximizing user’s task
success and minimizing the workload on human
agents.
We set the following three goals for our method:
• Maximize task success rate for the user by
transferring to a human agent in cases where
the dialog system might fail.
• Minimize the use of human agent by trans-
ferring to the human agent only when it is
essential.
• Learn online from the human agent’s re-
sponse to reduce the use of human agent
over time.
This paper is organized as follows. Sezione 2
describes the proposed method. In Section 3,
we introduce modified-bAbI dialog tasks, Quale
simulate new user behavior occurrence at deploy-
ment and serve as testbed for evaluating our
proposed method. Sezione 4 details our exper-
imental results on modified-bAbI dialog tasks.
Sezione 5 discusses related work and Section 6
concludes.
2 Proposed Method
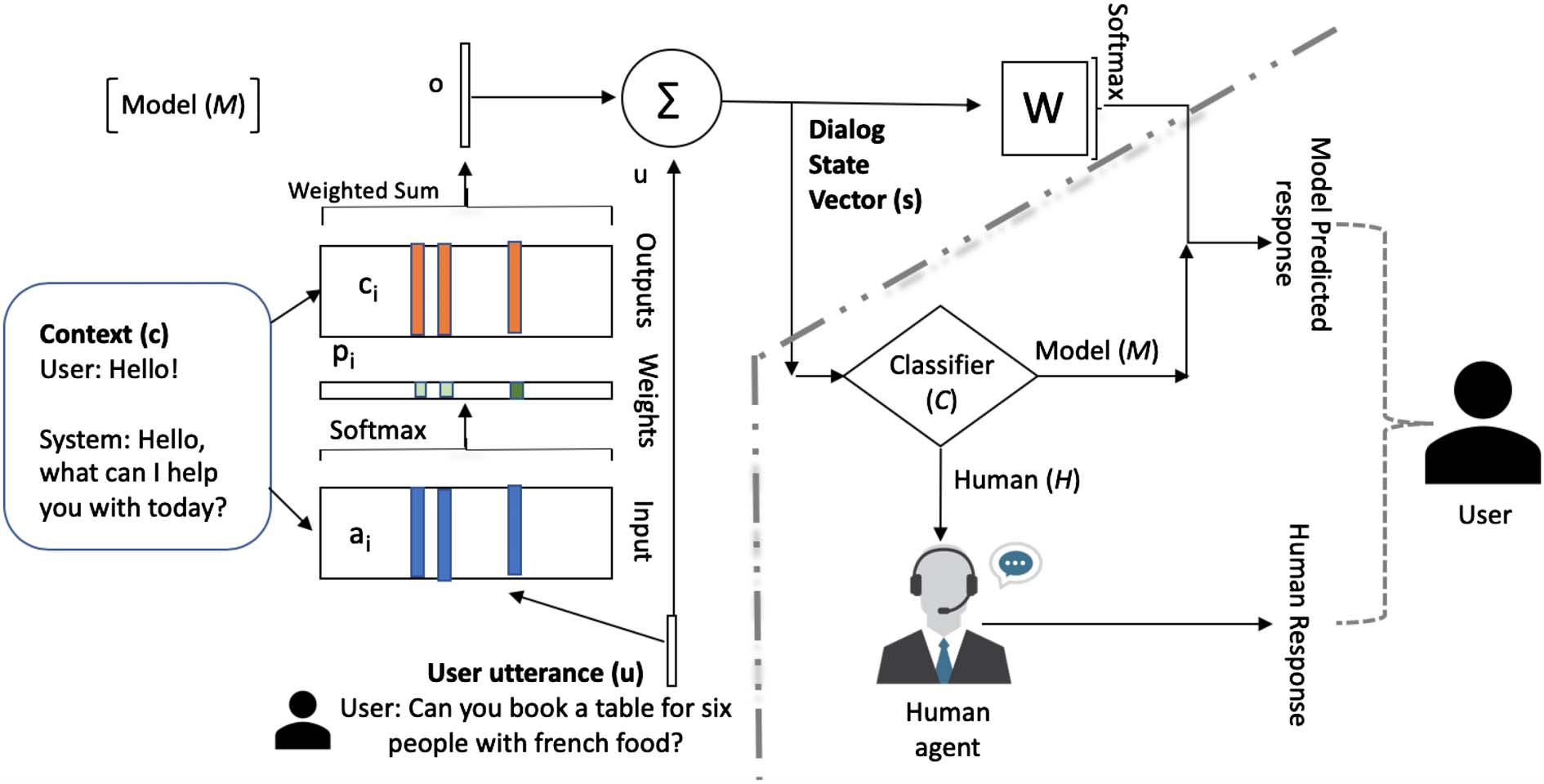
Consider a neural dialog model M trained for a
goal-oriented dialog task. We also have a human
agent H who is trained for the same task. Both
M and H can take the dialog so far as input and
produce the response for the user utterance (tu).
There is a neural classifier C that uses the dialog
state vector (S) from model M as input and decides
whether to use the model M to provide response
to the user or to transfer to the human agent H
who could then provide the response to the user.
The proposed method is shown in Figure 1 (right).
In a real-world setting, we cannot expect the
same exact user utterances to come during de-
ployment that the model came across during its
training. Therefore, for a new dialog, it is not
possible to know beforehand whether model (M )
would provide a correct response or not. IL
classifier (C) has to learn this through trial and
error and generalize. Therefore, the classifier is
trained using RL.
The classifier is provided a high reward if it
chooses the model M and the model produces a
correct/valid response. The classifier is provided
a relatively smaller reward if it chooses the
human agent instead. We assume that the human
agent’s response is always correct. If the classifier
chooses the model M and the model provides an
incorrect response, il classificatore (C) is penalized
heavily. The validation, if a response is correct
or not, is provided by the user as feedback. IL
classifier is trained using RL to make decisions
(take actions) in order to maximize this reward
function. The reward function helps achieve two
of our aforementioned goals:
• Maximize task success rate for the user: IL
reward function encourages the classifier to
learn the dialog scenarios in which the model
M might fail and choose a human agent
instead. Therefore,
the classifier helps to
avoid sending an incorrect response to the
user from the model.
• Minimize human agent use: The reward func-
tion also encourages the classifier to learn,
identify, and choose the model M in cases
where the model has a high chance of pro-
viding the correct response, as the classifier
gets a higher reward compared to choosing
a human agent. This minimizes the use of
human agent to only when it is essential.
376
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Figura 1: Left: A single layer version of memN2N (model M ). Right: Proposed method.
Here is an example reward function, Quale
would achieve the desired goals:
of the model (M ) and the model is updated online
using SL. This helps achieve our third goal:
• +1: if human H is chosen
• +2: if model M is chosen and the model’s
response is correct
• −4: if model M is chosen and the model’s
response is incorrect
The reward function allows the designer to
choose the trade-off between maximizing the user
task completion versus minimizing the human
agent’s workload. Per esempio, when the model
(M ) is chosen, increasing the positive reward if
the model’s response is correct and reducing the
penalty when the model’s response is incorrect
would encourage the overall system to use model
(M ) more to respond to the user.
The gradient updates obtained for the clas-
sifier
through the rewards received are also
propagated back to the model M through the
dialog state vector. This trains the model M
to incorporate a) essential information about the
dialog so far and b) the model’s confidence in
producing the correct response, in the dialog state
vector, such that the classifier can utilize it to
make the right decision.
Whenever the classifier chooses the human
agent (H), the dialog interaction (including the
human response) is also added to the training data
• Reduce human agent use over time: IL
online update allows the model M to respond
to the corresponding new user behavior and
provide the correct response if a similar
dialog scenario occurs in the future. This also
enables the classifier to reduce its dependence
on the human agent (H) over time.
The classifier keeps changing during its lifetime
to adapt to the changes in the model M . Note that
a human agent is involved only when the classifier
transfers the dialog to a human. The idea is generic
enough to be used with any neural dialog model
(M )—for example, HRED (Sordoni et al., 2015)
or end-to-end memory network (Sukhbaatar et al.,
2015). In our experiments, we use the end-to-
end memory network for our model M and a
multi-layer perceptron (MLP) for the classifier C.
Additional details on the model architecture and
training are provided in Section 4.
3 Modified bAbI dialog tasks
bAbI dialog tasks (referred to as original-bAbI dia-
log tasks from here on) were proposed by Bordes
et al. (2017) as a testbed to evaluate the strengths
and shortcomings of end-to-end dialog systems
in goal-oriented applications (Seo et al., 2017;
Rajendran et al., 2018). The data set is generated
by a restaurant reservation simulation where the
377
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
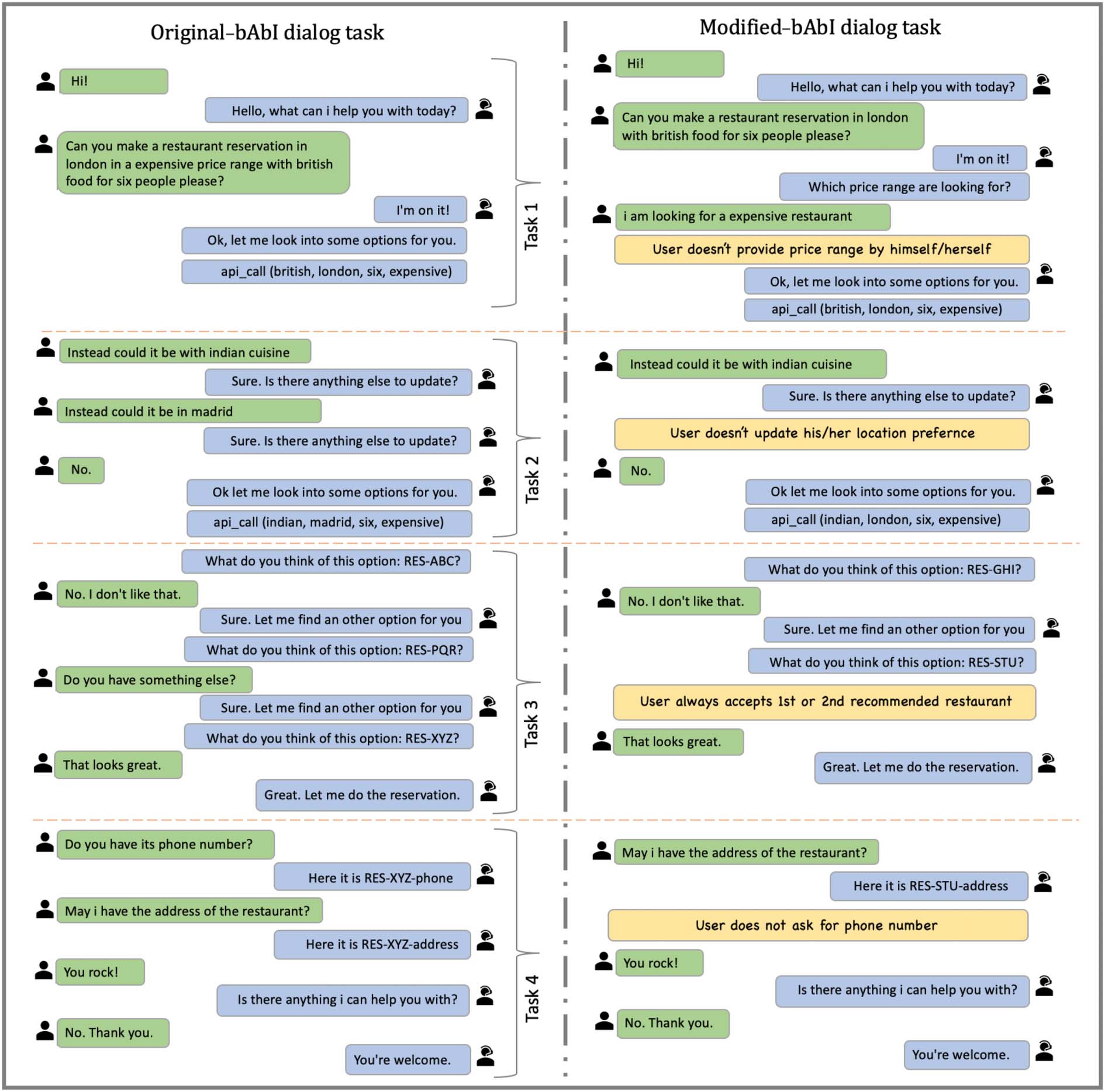
Figura 2: Modified-bAbI dialog task. A user (in green) chats with a dialog system (in blue) to book a table at a
restaurant. We update each subtask in the bAbI dialog task with specific changes (in yellow).
final goal is booking a table. The simulator uses a
knowledgebase (KB) which contains information
about restaurants. There are five tasks: Task 1
(Issuing API calls), Task 2 (Updating API calls),
Task 3 (Displaying options), Task 4 (Providing
extra information), and Task 5 (Conducting full
dialogs). Tasks 1 E 2 test the dialog system to
implicitly track dialog state, Tasks 3 E 4 check
if the system can learn to use the information from
KB, and Task 5 combines all tasks. It is a retrieval
task, where the dialog system has to retrieve the
correct response from a set of given candidate
responses.
We propose modified-bAbI dialog tasks, an
extension of original-bAbI dialog tasks (Bordes
et al., 2017). We modify the original-bAbI dialog
tasks by removing and replacing certain user
behaviors from the training and validation data.
The test set is left untouched. This simulates a
scenario where some new user behaviors arise
during the test (deployment) time that were not
seen during the training and hence allows us to
test our proposed method. This also mimics real-
world data collection via crowdsourcing in the
sense that certain user behavior is missing from
the training data. Figura 2 shows a dialog sample
378
Behavior type
Task-1
Task-2
Task-3
Task-4
# dialogs
494
539
561
752
Tavolo 1: Modified-bAbI test set statistics. IL
numbers shown represent number of dialogs in
test data (Task 5) out of 1,000 dialogs where a
certain type of new user behavior is encountered.
from modified-bAbI dialog tasks.2 We propose the
following changes to the training and validation
data of the original-bAbI dialog tasks:
• In Task 1, a user places a request that can
contain from 0 A 4 of the required fields
to book a table. The system asks questions
to retrieve values for the missing fields
and generates the correct corresponding API
IL
In modified-bAbI dialog tasks,
call.
user doesn’t provide the value for the price
range by themselves and only provides that
information when asked by the system.
• In Task 2, the user can request the system
to update any of their preferences (cuisine,
location, price range, and number of people).
the user
In modified-bAbI dialog tasks,
doesn’t update their location preference.
• In Task 3, for the API call matching the
user request, information retrieved from the
KB is provided as part of dialog history.
The system must propose options to the
user by listing the restaurant names sorted
by their corresponding rating (in decreasing
order). The system keeps proposing a new
restaurant until the user accepts. In modified-
bAbI dialog tasks, the user always accepts
first or second recommended restaurant.
• In Task 4, the user can ask for the phone
number or address for the selected restaurant.
In modified-bAbI dialog tasks, the user does
not ask for the phone number.
We incorporate this changes to the final
Task 5 (Conducting full dialogs). We perform
experiments on modified-bAbI dialog task-5, COME
Tasks 1−4 are subsets of a full conversation
2modified-bAbI dialog tasks – https://github.
com/IBM/modified-bAbI-dialog-tasks.
# new behavior
# dialogs
0
20
1
178
2
350
3
340
4
112
Tavolo 2: Modified-bAbI test set statistics. IL
numbers shown represent number of dialogs in
test data (Task 5) out of 1,000 dialogs, where no
new user behavior or one or more type of new user
behavior is encountered.
and don’t represent a complete meaningful real-
world conversation standalone. The statistics for
new user behavior in the test set (which was left
untouched) are shown in Tables 1 E 2.
4 Experiments and Results
4.1 Baseline method
A dialog model M is trained on the modified
dialog bAbI task and is used for deployment. IL
model is not updated during test/deployment. An
end-to-end memory network (Sukhbaatar et al.,
2015) architecture is used for the model M .
End-to-end memory networks (memN2N) are
an extension of memory networks proposed by
Weston et al. (2014). They have been successful
on various natural
language processing tasks
and perform well on original-bAbI dialog tasks.
Hence, we chose them for our model M .
A single-layer version of the memN2N model
is shown in Figure1 (left). A given sentence (io)
from the context (dialog history) is stored in
the memory by: UN) its input representation (ai)
and b) its output representation (ci), where each
memory contains the embedding representation
for that sentence. The embedding representation
the sentence is calculated by adding the
Di
embeddings of all
the words in the sentence
(Bordes et al., 2017). Attention of current user
utterance (tu) over memory is computed via dot
Prodotto, to identify the relevance of the memory
with respect to the current user utterance (query).
(pi) represents the probability for each memory
based on attention scores (equation 1). An output
vector (o) is computed by the weighted sum of
memory embeddings (ci) with their corresponding
probabilities (pi) (equation 2). The output vector
(o) is the overall context embedding and, con
query (tu) represents the dialog state vector (S)
(equation 3). The attention can be done multiple
times, namely, multiple layers (3 in our exper-
iments), by updating u with s and repeating
equations (1), (2), E (3). The last internal state
379
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Data Set
Original-bAbI
Modified-bAbI
Per-turn
98.5
81.7
Per-dialog
77.1
3.7
Tavolo 3: Test results (accuracy %) for our base-
line method (M :memN2N) across original and
modified bAbI dialog tasks.
is then used as the dialog state vector s to select
the candidate response for the model M and also
provided as input to the classifier C.
pi = Softmax(uT (ai))
(cid:2)
o =
pici
io
s = (o + tu)
(1)
(2)
(3)
The model is trained using SL on the training
is then used during
dati. The trained model
deployment. In our case, deployment is same as
testing the model on the test data. Our results for
the baseline method for the original and modified
bAbI dialog tasks are given in Table 3. The hyper-
parameters used for training the model M in the
baseline method are provided in Appendix A.1.
Per-turn accuracy measures the percentage
of responses that are correct (cioè., the correct
candidate is selected from all possible candidates).
Note that, as mentioned in Section 3, we only
modify the training and validation sets, and use
the same test set. Per-dialog accuracy measures
the percentage of dialogs where every response is
correct. Therefore, even if only one response in
a dialog is incorrect, this would result in a failed
dialog (cioè., failure to achieve the goal of booking
a table).
From Table 3, we observe that the baseline
method of using the trained memN2N model
performs poorly on modified-bAbI dialog tasks,
which has new user behaviors at test time that the
model has not seen during training. For modified-
bAbI dialog tasks, the baseline method achieves
81.7% on per-turn accuracy and the per-dialog
accuracy decreases to 3.7%. This implies that
the majority of dialogs would be unsuccessful
in completing the goal. These results clearly
demonstrate that the baseline method (end-to-
end memory network) does not perform well on
our proposed testbed, which simulates new user
behaviors occurrence at deployment.
4.2 Proposed Method: M ∗ + C ∗
We use the same memN2N model used in the
baseline method for the model M here. Tuttavia,
in our proposed method, we also have a classifier
C that takes as input the dialog state vector s and
makes a decision on whether to use the model to
respond to the user or to transfer the dialog to a
human agent. For our experiments, C is a MLP
that outputs a probability distribution over the two
actions. The sampled action is performed and the
user feedback is used to determine the reward
obtained, which is then used to train the classifier
and the model.
The following scenarios arise during deploy-
ment depending on the classifier’s action and the
model’s prediction:
• The classifier could choose a human agent
H to respond to the user. Because we use
the test data of the modified-bAbI dialog task
as a way to test deployment performance,
we already have the ground truth labels for
the different dialog scenarios that arise during
the deployment. We use these ground truth
labels as the human response.
In real world,
• The classifier chooses the model M and
the model produces a correct or incorrect
risposta.
this validation/
feedback on whether the response was correct
or not
is obtained from the user during
deployment. For our experiments, we use the
ground truth labels for test data to provide
the validation from the user. In a sense,
we mimic an ideal user using the test data
ground truth labels.
We have two versions of the proposed method:
UN) the model
trained on the training data is
fixed during deployment and only the
kept
classifier is updated (M + C ∗), and b) both the
model and the classifier are updated (M ∗ + C ∗)
during deployment. The classifier is trained from
scratch using REINFORCE (Williams, 1992). For
M ∗ +C ∗, the model is updated using the following
three ways:
• The gradients obtained for the classifier C
are passed through the dialog state vector s
to the model.
• The human responses provided for cases
where the classifier transferred the dialog
380
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Method
User Accuracy
Model ratio
R: 1, 2, -4
Baseline method (M)
M + C ∗
M ∗ + C ∗
UN + C ∗
M ∗
M + C ∗
M ∗ + C ∗
UN + C ∗
M ∗
R: 1, 3, -3
Per-turn
81.73(0)
92.85(1.58)
96.28(1.16)
96.19 (1.21)
91.31(1.15)
94.67(1.20)
94.08(1.0)
Per-dialog
3.7(0)
33.48(10.59)
54.5(10.72)
54.44(11.40)
26.50(7.57)
43.48(8.80)
38.8(8.15)
100.0(0)
51.97(8.22)
64.06(4.65)
61.14(6.9)
58.82(4.62)
70.33(2.13)
69.69(6.14)
Final Model Accuracy
Per-dialog
Per-turn
81.73(0)
81.73(0)
90.83(0.82)
88.98(0.34)
81.73(0)
89.27(0.74)
88.75(0.91)
3.7(0)
3.7(0)
14.82(3.7)
10.26(1.39)
3.7(0)
12.84(2.22)
11.62(2.61)
Tavolo 4: Test results for the different methods on the modified-bAbI dialog task. The numbers represent
the mean and standard deviation (shown in parenthesis) of running the different methods across 5
different permutations of the test set. User Accuracy: Task success rate for the user; Model ratio:
Percentage of time the classifier chooses the model M ; Final Model Accuracy: Accuracy of the model
M at the end of testing.
to a human agent, are added to the training
data to augment it and are also used to update
the model using supervised learning.
• Dialogs are sampled from the augmented
training data and are used to update the model
using supervised learning to avoid forgetting.
The M ∗ + C ∗ method uses a fixed number of
samples (per esempio., 2 batches for our experiments) from
augmented training data to update the model. Noi
also implement and evaluate a variant of M ∗ + C ∗
method: M ∗
UN + C ∗ where the number of samples
are decided based on the model M ’s performance
on validation data. During deployment, after each
batch of test data, the model is evaluated on
the validation data. The difference between the
current validation per-turn accuracy (vcurrent
) E
the best validation per-turn accuracy so far (vbest
acc )
estimates the loss in information learned from
original training data during deployment. This is
used to determine the number of batches (b ≥ 0)
for updating the model, as per the equation:
acc
b = α ∗ (vcurrent
acc
− vbest
acc )
(4)
The M ∗
UN + C ∗ (a = adaptive) method tries to
update the model with the right number of dialog
samples from the augmented data. Further details
on training are provided in Appendix A.2. Noi
perform our experiments on two sets of reward
functions. The first reward function is as follows:
• +1: if human H is chosen
• −4: if model M is chosen and the model’s
response is incorrect
The results are shown in Table 4. The test
data are provided sequentially, which mimics the
deployment
in a real-world setting. Because
the performance depends on the order in which
the test dialogs are provided, we evaluate our
proposed method on 5 different permutations of
the test set. We present the mean and standard
deviation of the performance measures across the
5 permutations. The results for the individual
permutations are provided in Appendix B. IL
performance measures used for evaluation are:
• User Accuracy: Task success
COME
perceived by the user, irrespective of whether
the response is provided by the human agent
H or the model M . This measures our goal
#1 – Maximize task success rate.
rate
• Model ratio: Percentage of time the classifier
C provides the model response to the user
involved). Questo
(cioè., human agent
measures our goal #2 – Minimize human
agent use.
is not
• Final Model Accuracy: Accuracy of the
model M on the test data at the end of
testing. This is obtained by evaluating the
model M on the test data again after the
testing phase is over. This measures our goal
#3 – Reduce human agent use over time, by
online learning of the model.
• +2: if model M is chosen and the model’s
response is correct
While the baseline method M gets a per-turn
user accuracy of 81.73%, using and learning a
381
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
If
the model
classifier (M + C ∗) achieves user accuracy of
92.85%, an increase of more than 10 percentage
points.
is also updated during
the deployment (M ∗ + C ∗), we observe further
increase in per-turn accuracy (96.28%). Whereas
M + C ∗ achieves better performance by using the
modello 51.97% of the time, M ∗ + C ∗ achieves
high accuracy by using the model even more
(64.06%), thereby reducing the human agent’s
workload. This is attributed to the improvement in
the model during the deployment for the M ∗ + C ∗
method. This is supported by the improvement
in the model accuracy, going from 81.73% at the
start of test to 90.83% by the end (shown as the
final model M ’s accuracy in Table 2). We observe
that M ∗
UN + C ∗ does not provide an improvement,
but performs similarly to M ∗ + C ∗ on all
performance measures. The numbers reported
are calculated as the running average of the dif-
ferent performance measures by evaluating on
the fixed size test data (1,000 dialogs) once se-
quentially. We expect an improvement in the var-
ious performance measures over longer periods
of deployment (test time).
The reward function determines the trade-off
between the user’s task success rate and the human
agent’s load. We perform additional experiments
by modifying the reward function to showcase this
trade-off. Per esempio, if we want to reduce the
load on the human agent further, we can increase
the reward provided when the model M is chosen
and the model’s response is correct and decrease
the penalty when the model is chosen and model’s
response is incorrect. One such reward function is
come segue:
• +1: if human H is chosen
• +3: if model M is chosen and the model’s
response is correct
• -3: if model M is chosen and the model’s
response is incorrect
the new reward function
The results for
two rows of Table 4.
are shown in the last
In comparison with performance measures for
reward function (1,2,-4), for both methods—M +
C ∗ and M ∗ + C ∗—we observe a small drop in
the user accuracy and a significant increase in
model ratio, which showcases our intended goal
in altering the reward function.
382
5 Related Work
Most of
the successful goal-oriented dialog
learning systems in the past have been based on
slot-filling for domain-specific tasks (Schatzmann
et al., 2006; Singh et al., 2000). These include
Markov decision process (MDP) based (Levin
et al., 2000; Pieraccini et al., 2009) and partially
observable Markov decision process (POMDP)
based (Young et al., 2013; Gasic et al., 2013)
systems. These are RL systems that model and
track state transitions and take appropriate actions
(dialog utterances) to obtain information from
the user to fill the desired slots. They require
hand-crafted features for state and action space
representations and hence are restricted to very
narrow settings.
Recently there has been a great deal of interest
in building end-to-end neural dialog systems
for goal-oriented dialog tasks. Both supervised
learning-based (training the model on collected
chat logs of the dialog task) (Bordes et al., 2017;
Eric and Manning, 2017; Wen et al., 2017) E
deep RL-based systems (Zhao and Eskenazi, 2016;
Li et al., 2017B; Peng et al., 2017) have been
studied. For RL systems, training the model from
scratch requires many interactions. Hence, RL
systems are often augmented with SL-based pre-
training on collected chat logs of the dialog task
(Henderson et al., 2008; Williams et al., 2017; Liu
and Lane, 2017).
Training models through RL by using user
feedback during deployment makes the system
more robust to new user behaviors (Williams and
Zweig, 2016; Liu and Lane, 2017). There has also
been recent work on actively using human in the
loop to teach and assist the learning of neural
dialog systems (Li et al., 2017UN; Liu et al., 2018).
Although these approaches have focused on
different ways to improve the neural goal-oriented
dialog systems and maximize user success rate
by a) improving the model, B) implementing
better ways of online learning, or c) using
human teaching; the problem of handling new
user behaviors during deployment has not yet
been solved. Our proposed method directly
optimizes for maximum user success and provides
a framework where existing techniques for model
apprendimento, online learning, and human teaching
can be used in tandem, to enable the end-to-end
goal-oriented dialog systems ready for real-world
use.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
6 Conclusion and Future Work
Riferimenti
Our proposed method provides a new framework
for learning and training goal-oriented dialog
systems for real-world use. The proposed method
allows us to maximize user success rate by
minimally using human agents instead of the
dialog model for cases where the model might
fail. Our evaluation on the modified-bAbI dialog
task shows that our proposed method is effective
in achieving the desired goals.
We introduce a new method for designing and
optimizing goal-oriented dialog systems geared
for real-world use. Our method allows the designer
to determine the trade-off between the desired
user’s task success and human agent workload.
We believe this opens up a new and promising
research direction that would spark an increase in
the use of end-to-end goal-oriented dialog systems
in the real world soon.
There are several limitations to our current
evaluation, which we discuss here and hope to
overcome in future work. We use simple tech-
niques for the different components in our method,
but these can be replaced with more sophisticated
state-of-the-art techniques for improved perfor-
mance in terms of absolute values. Per esempio,
whereas we use REINFORCE, an on-policy
method for training the classifier, it would be
interesting to try off-policy reinforcement learn-
ing techniques to use the samples more effectively.
We could also try state-of-the-art online learning
methods to see how they affect the performance.
In our experiments, the learning of the classi-
fier C starts from scratch during the deployment.
In our future work, we are interested in exploring
ways of pre-training the classifier C before
deployment, so that the learning of C can happen
faster, with less samples during deployment. Noi
are also interested in drawing ideas from novelty
detection methods to see if they can help the
classifier C to generalize better.
Note that, for our experiments, we use an artifi-
cially constructed data set—modified bAbI dialog
tasks—which incorporates two essential assump-
zioni: UN) a perfect human agent and b) correct user
feedback. For actual real-world deployments with
real users, although the former assumption might
still hold true, the latter might not always be true. In
our future work, we are interested in relaxing these
assumptions and evaluating our proposed method
on actual real-world deployments with real users.
Antoine Bordes, Y-Lan Boureau, and Jason Weston.
2017. Learning end-to-end goal-oriented dialog.
In the International Conference on Learning
Representations (ICLR).
Mihail Eric and Christopher D. Equipaggio. 2017.
Key-value retrieval networks for task-oriented
dialogue. In Proceedings of the 18th Annual
SIGdial Meeting on Discourse and Dialogue
(SIGDIAL).
Milica Gasic, Catherine Breslin, Matthew
Henderson, Dongho Kim, Martin Szummer,
Blaise Thomson, Pirros Tsiakoulis, and Steve
Young. 2013. POMDP-based dialogue manager
adaptation to extended domains. Negli Atti
Di
the Special
Interest Group on Discourse and Dialogue
(SIGDIAL), pages 214–222.
the 14th Annual Meeting of
James Henderson, Oliver Lemon, and Kallirroi
Georgila 2008. Hybrid reinforcement/supervised
learning of dialogue policies from fixed data sets.
Linguistica computazionale, 34(4):487–511.
Esther Levin, Roberto Pieraccini, and Wieland
Eckert. 2000. A stochastic model of human-
machine interaction for learning dialog strat-
egies. IEEE Transactions on Speech and Audio
in lavorazione, 8(1):11–23.
Jiwei Li, Alexander H. Mugnaio, Sumit Chopra,
Marc’Aurelio Ranzato, and Jason Weston.
2017UN. Dialogue learning with human-in-the-
loop. In the International Conference on Learn-
ing Representations (ICLR).
Xiujun Li, Yun-Nung Chen, Lihong Li, Jianfeng
Gao, and Asli Celikyilmaz. 2017B. End-to-end
task-completion neural dialogue systems. In
Proceedings of the Eighth International Joint
Conferenza sull'elaborazione del linguaggio naturale
(IJCNLP).
Bing Liu and Ian Lane. 2017. Iterative policy
learning in end-to-end trainable task-oriented
neural dialog models. 2017 IEEE Automatic
Speech Recognition and Understanding Work-
shop (ASRU).
Bing Liu, Gokhan T¨ur, Dilek Hakkani-T¨ur,
Pararth Shah, and Larry Heck. 2018. Dialogue
383
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
learning with human teaching and feedback
in end-to-end trainable task-oriented dialogue
systems. Negli Atti del 2018 Confer-
ence of
the North American Chapter of
the Association for Computational Linguistics
(NAACL).
and Jian-Yun Nie. 2015. A hierarchical recur-
rent encoder-decoder for generative context-
aware query suggestion. Negli Atti di
the 24th ACM International on Conference
on Information and Knowledge Management
(CIKM).
Baolin Peng, Xiujun Li, Lihong Li, Jianfeng
Gao, Asli Celikyilmaz, Sungjin Lee, and Kam-
Fai Wong. 2017. Composite task-completion
dialogue policy learning via hierarchical deep
reinforcement learning. Negli Atti del
2017 Conference on Empirical Methods in
Elaborazione del linguaggio naturale (EMNLP).
Roberto Pieraccini, David Suendermann, Krishna
Dayanidhi, and Jackson Liscombe. 2009. Are
we there yet? Research in commercial spoken
dialog systems. In Proceedings of the 12th
International Conference on Text, Speech and
Dialogue, TSD ’09, pages 3–13.
Janarthanan Rajendran, Jatin Ganhotra, Satinder
Singh, and Lazaros Polymenakos. 2018. Learn-
ing end-to-end goal-oriented dialog with mul-
tiple answers. Negli Atti di
IL 2018
Conference on Empirical Methods in Natural
Language Processing (EMNLP).
Jost Schatzmann, Karl Weilhammer, Matt
Stuttle, and Steve Young. 2006. A survey
of statistical user simulation techniques for
reinforcement-learning of dialogue manage-
ment strategies. The Knowledge Engineering
Review, 21(2):97–126.
Minjoon Seo, Sewon Min, Ali Farhadi, E
Hannaneh Hajishirzi. 2017. Query-reduction
networks for question answering. In Procedi-
ings of the International Conference on Learn-
ing Representations (ICLR).
Satinder Singh, Michael J. Kearns, Diane J.
Litman, and Marilyn A. Walker. 2000. Empir-
ical evaluation of a reinforcement
apprendimento
spoken dialogue system. Negli Atti del
Seventeenth National Conference on Artificial
Intelligence and Twelfth Conference on Inno-
vative Applications of Artificial Intelligence,
pages 645–651.
Alessandro Sordoni, Yoshua Bengio, Hossein
Vahabi, Christina Lioma, Jakob Grue Simonsen,
arthur
Sainbayar Sukhbaatar,
Jason
Weston, and Rob Fergus. 2015. End-to-end
In Advances in Neural
memory networks.
Information Processing Systems 28 (NeurIPS).
szlam,
Tsung-Hsien Wen, David Vandyke, Nikola
Mrkˇsi´c, Milica Gasic, Lina M. Rojas Barahona,
Pei-Hao Su, Stefan Ultes, and Steve Young.
2017. A network-based end-to-end trainable
task-oriented dialogue system. Negli Atti
the European
Di
Capitolo dell'Associazione per il calcolo
Linguistica (EACL).
the 15th Conference of
Jason Weston, Sumit Chopra, and Antoine Bordes.
2014. Memory networks. Negli Atti di
the International Conference on Learning
Representations (ICLR).
Jason D. Williams, Kavosh Asadi, and Geoffrey
Zweig. 2017. Hybrid code networks: Practical
and efficient end-to-end dialog control with
supervised and reinforcement
In
Proceedings of the 55th Annual Meeting of
the Association for Computational Linguistics
(ACL).
apprendimento.
Jason D. Williams and Geoffrey Zweig. 2016.
End-to-end lstm-based dialog control optimized
with supervised and reinforcement learning.
CoRR, abs/1606.01269.
Ronald J. Williams 1992. Simple statistical gradient-
following algorithms for connectionist rein-
forcement learning. Apprendimento automatico, 8(3–4):
229–256.
Steve J. Young, Milica Gaˇsi´c, Blaise Thomson,
and Jason D. Williams. 2013. POMDP-based
statistical spoken dialog systems: A review.
Proceedings of the IEEE, 101(5):1160–1179.
Tiancheng Zhao and Maxine Eskenazi. 2016.
Towards end-to-end learning for dialog state
tracking and management using deep re-
inforcement learning. Negli Atti del
17th Annual Meeting of the Special Interest
Group on Discourse and Dialogue (SIGDIAL).
384
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
Method
User Accuracy
Model ratio
Baseline method (M)
Reward: 1, 2, -4 (M ∗ + C ∗)
Reward: 1, 3, -3 (M ∗ + C ∗)
Per-turn
81.73
97.49
96.4
94.47
97.07
95.99
92.77
94.23
95.22
95.47
95.68
Per-dialog
3.7
65.2
55.1
38.3
62.9
51.0
29.2
41.3
46.5
49.2
51.2
100.0
62.15
60.45
71.13
60.23
66.35
73.7
68.6
70.1
68.45
70.8
Final Model Accuracy
Per-dialog
Per-turn
3.7
81.73
18.2
91.33
12.7
90.58
9.7
89.54
18.4
91.65
15.1
91.06
11.4
88.52
12.3
88.79
11.3
89.19
12.5
89.39
16.7
90.46
Tavolo 5: Test results for M ∗ + C ∗ method on different permutation of modified-bAbI dialog task’s
test set
Method
User Accuracy
Model ratio
Baseline method (M)
Reward: 1, 2, -4 (M ∗
UN + C ∗)
Reward: 1, 3, -3 (M ∗
UN + C ∗)
Per-turn
81.73
96.15
94.69
96.52
97.99
95.63
92.51
95.23
94.03
94.55
94.1
Per-dialog
3.7
51.8
43.4
56.5
72.9
47.6
26.9
49.3
36.4
41.4
40.0
100.0
64.64
66.96
56.57
51.26
66.27
79.16
65.67
70.06
63.03
70.57
Final Model Accuracy
Per-dialog
Per-turn
3.7
81.73
9.9
88.52
8.8
89.16
9.6
88.75
12.5
89.37
10.5
89.12
9.9
87.81
12.0
88.8
8.2
87.82
14.8
89.73
13.2
89.57
Tavolo 6: Test results for M ∗
test set.
UN + C ∗ method on different permutation of modified-bAbI dialog task’s
UN. Appendix: Training Details
A.1 Baseline Method: (M )
The hyperparameters used for the training the
memN2N model
in our baseline method are
come segue: hops = 3, embedding size = 20,
batch size = 32. The entire model
is trained
using stochastic gradient descent with learning
rate = 0.01 and annealing (anneal ratio = 0.5,
anneal period = 25), by minimizing the standard
cross-entropy loss between the predicted response
and the correct response. We learn two embedding
matrices A and C for encoding context (input and
output representations) and a separate embedding
matrix B for encoding the query. We use position
encoding for encoding word position in the
sentence (Sukhbaatar et al., 2015). We also add
to Bordes et al.
temporal features to encode information about
the speaker for the given utterance (user/system),
similar
(2017) and weight
matrices TA and TC are learned for encoding
temporal features. The same weight matrices are
reused for the 3 hops. We used 599 as the
random seed for both tf.set random seed and
tf.random normal initializer for our embedding
matrices. The test results reported for the baseline
method are calculated by choosing the model with
the highest validation per-turn accuracy across
multiple runs.
A.2 Proposed Method: (M ∗ + C ∗)
We use the same hyperparameters as the baseline
training the model M .
method of A.1 for
385
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
The classifier C is trained using REINFORCE
(Williams, 1992) with a learning rate of 0.01.
In M + C ∗, after every batch of test data, IL
classifier MLP is updated. In M ∗ + C ∗, after
every batch of the test data (deployment), along
with the classifier MLP update, the model is also
updated in the three ways discussed. In M ∗ + C ∗
the update using the human responses is done
multiple times after every batch (3 in our case).
For the update with the training data, two batches
of training data are randomly sampled after every
batch of test data.
B. Appendix: Extended Results
Tables 5, 6, E 7 shows the results for (M ∗ +C ∗),
UN + C ∗), E (M + C ∗) metodi, rispettivamente,
(M ∗
on all
IL
IL 5 individual permutations of
modified bAbI dialog task test set.
User Accuracy
Model ratio
Per-turn
per-dialog
Baseline method (M)
3.7
Reward: 1, 2, -4, (M + C ∗)
100.0
81.73
92.44
92.57
93.96
94.7
90.59
90.41
92.25
92.12
89.75
92.05
33.1
32.7
42.0
43.0
16.6
50.98
53.22
44.63
45.82
65.24
Reward: 1, 3, -3, (M + C ∗)
21.1
36.1
32.5
18.2
24.6
54.67
54.79
58.07
65.69
60.92
Tavolo 7: Test results for M + C ∗ method on
different permutations of modified-bAbI dialog
task’s test set.
l
D
o
w
N
o
UN
D
e
D
F
R
o
M
H
T
T
P
:
/
/
D
io
R
e
C
T
.
M
io
T
.
e
D
tu
/
T
UN
C
l
/
l
UN
R
T
io
C
e
–
P
D
F
/
D
o
io
/
.
1
0
1
1
6
2
/
T
l
UN
C
_
UN
_
0
0
2
7
4
1
9
2
3
4
5
5
/
/
T
l
UN
C
_
UN
_
0
0
2
7
4
P
D
.
F
B
sì
G
tu
e
S
T
T
o
N
0
8
S
e
P
e
M
B
e
R
2
0
2
3
386