REPORT
What is “Where”: Physical Reasoning
Informs Object Location
Tal Boger1
and Tomer Ullman2
1Département de psychologie, Yale University, New Haven, CT, Etats-Unis
2Département de psychologie, Université Harvard, Cambridge, MA, Etats-Unis
un accès ouvert
journal
Mots clés: object representation, perception, physical reasoning
ABSTRAIT
A central puzzle the visual system tries to solve is: “what is where?” While a great deal of
research attempts to model object recognition (“what”), a comparatively smaller body of work
seeks to model object location (“where”), especially in perceiving everyday objects. Comment faire
people locate an object, right now, in front of them? In three experiments collecting over
35,000 judgements on stimuli spanning different levels of realism (line drawings, real images,
and crude forms), participants clicked “where” an object is, as if pointing to it. We modeled
their responses with eight different methods, including both human response-based models
(judgements of physical reasoning, spatial memory, free-response “click anywhere” judgements,
and judgements of where people would grab the object), and image-based models (uniform
distributions over the image, convex hull, saliency map, and medial axis). Physical reasoning was
the best predictor of “where,” performing significantly better than even spatial memory and
free-response judgements. Our results offer insight into the perception of object locations
while also raising interesting questions about the relationship between physical reasoning and
visual perception.
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
/
e
d
toi
o
p
m
je
/
je
un
r
t
je
c
e
–
p
d
F
/
d
o
je
/
je
.
/
/
1
0
1
1
6
2
o
p
m
_
un
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
un
_
0
0
0
7
5
p
d
/
.
je
Citation: Boger, T., & Ullman, T. (2023).
What is “Where”: Physical Reasoning
Informs Object Location. Open Mind:
Discoveries in Cognitive Science, 7,
130–140. https://doi.org/10.1162/opmi
_a_00075
EST CE QUE JE:
https://doi.org/10.1162/opmi_a_00075
Reçu: 3 Août 2022
Accepté: 21 Mars 2023
Intérêts concurrents: The authors
declare no conflict of interests.
Auteur correspondant:
Tal Boger
tal.boger@yale.edu
droits d'auteur: © 2023
Massachusetts Institute of Technology
Publié sous Creative Commons
Attribution 4.0 International
(CC PAR 4.0) Licence
La presse du MIT
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
INTRODUCTION
When asked “where is the hammer,” with a hammer right in front of you, where would you
indiquer? Initially, this question seems trivial; the hammer is “over there.” Yet, one can give many
reasonable answers, each highlighting different properties. Perhaps you would point to the
center of the hammer (as it appears to you); or to its handle (the part where you would hold
it); or to its metal head (the part that performs the action); or to other locations still. The ques-
tion “where?” points to a subtle problem in our classic definitions of vision.
Early definitions of vision distilled the complex process of seeing into a simple question:
“what is where?» (Marr, 1982). Such definitions served as touchstones for exploring vision
in philosophy, cognitive science, and neuroscience, where researchers discovered an appar-
ent split in the visual system between the ventral stream—which models “what”—and the
dorsal stream—which models “where” (Schneider, 1969; though more recent work has signif-
icantly complicated this initially neat split, as discussed later).
Plenty of research in visual cognition has focused on modeling “what,” and there is an
expansive literature about the mechanisms underlying object recognition. While there is also
an expansive literature on “where,” by relative comparison it has been less explored than
What is “Where”
Boger and Ullman
“what,” especially in the perception of everyday objects. Ici, we take a step towards explor-
ing the nature of object location by asking: what is “where”?
Much of the existing work on modeling “where” analyzes processes different from simply
perceiving objects as they appear in front of us. Par exemple, various work explores the nature
of object location via spatial memory (Langlois et al., 2021), ambiguous shapes (Huttenlocher
et coll., 1991), object parts and scenes (Bar & Ullman, 1996), or eye movements ( Vishwanath &
Kowler, 2003). These all inform our understanding of object localization in the mind and use
methods similar to ours, though in a different context. Par exemple, these works only give hints
to where we may point at a hammer if it appeared right in front of us—but do not give a
well-defined answer. We expand on these works by testing the nature of perceived object
location in simple tasks with everyday objects at differing levels, revealing aspects of object
location in our daily lives.
Ici, we present three experiments collecting data from over 35,000 judgements in which
participants indicate “where” an object is. The experiments use objects covering a wide range
of information and realism (such that they generalize to a range of stimuli). We modeled
“where” using methods based on previous work, including both human response-based
models and image-based models. Across all levels of realism, a model that relies on physical
reasoning (perceived center-of-mass)1 best predicted “where” an object is. Our results provide
novel insights into how we model object locations in perception, and point to a surprising
relationship between physical reasoning and visual perception.
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
/
e
d
toi
o
p
m
je
/
je
un
r
t
je
c
e
–
p
d
F
/
d
o
je
/
je
/
/
.
1
0
1
1
6
2
o
p
m
_
un
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
un
_
0
0
0
7
5
p
d
/
.
je
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
RÉSULTATS
Our three experiments span a range of object realism. In Experiment 1, we used line drawings
with no depth and color. In Experiment 2, we used images of real objects with depth and color
(but no background). Enfin, in Experiment 3, we masked and rotated the line drawings, tel
that they became unidentifiable crude forms.
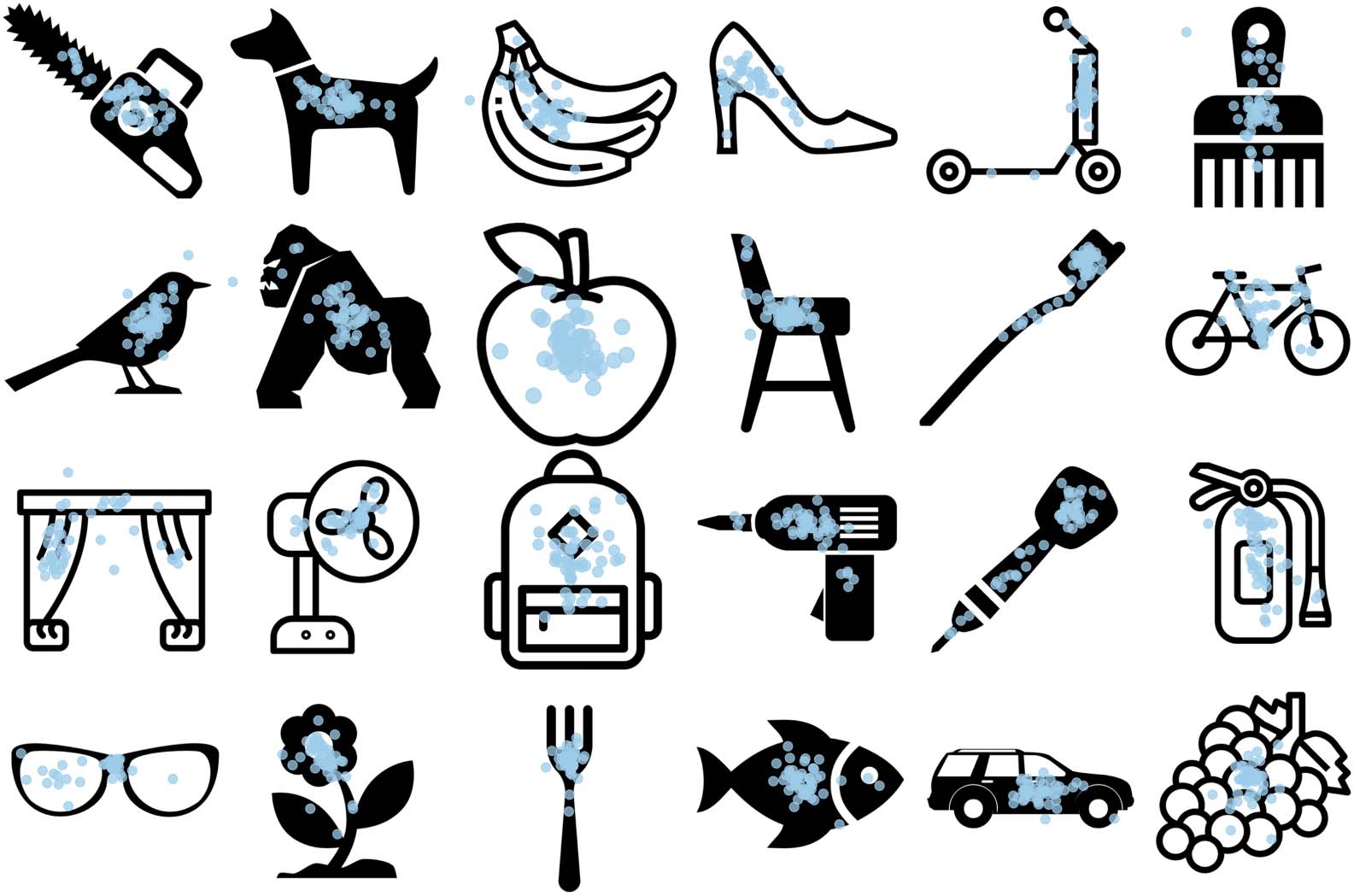
On each trial, participants clicked “where” each object is, as if pointing it out to another
person (Chiffre 1). Each stimulus set consisted of 50 objets, which included a range of every-
day entities, both symmetric and asymmetric items, tools, agents, and more.
We modeled participant responses for “where” using eight different models. The first three
models were based on human responses from other tasks, collected separately: (1) center of
mass (“click on the object’s center of mass”), (2) spatial memory (“click where the object was”
after the object disappeared), et (3) free-response clicks as an attention proxy (“click any-
where on the object”). Participants in each task and experiment were unique and independent.
We also considered four image-based models: (4) a uniform distribution across the object, (5) un
uniform distribution across the object’s convex hull, (6) the object’s saliency map (as gener-
ated by OpenCV fine-grained saliency maps), et (7) medial axis (as generated by scikit-
image). The models provide a balance between new proposals specific to this work, et
existing models that have been shown to perform well in similar tasks (par exemple., medial axis from
Firestone & Scholl, 2014). After we tested these broad models of “where,” we pre-registered
and analyzed a final, more specific model: (8) human responses on where they would grasp
the object to pick it up.
1 Note that, while other relevant dimensions for physical reasoning in humans exist beyond center of mass, nous
use center of mass as a proxy for physical reasoning. Computing center of mass requires some kind of physical
reasoning, which previous work has shown to be quite sensitive, or at least inaccurate in consistent ways which
still imply a physical computation (Cholewiak et al., 2013, 2015; Firestone & Keil, 2016), making such a proxy
reasonable and well-defined.
OPEN MIND: Discoveries in Cognitive Science
131
What is “Where”
Boger and Ullman
Example participant data from Experiment 1 (line drawings). Each blue dot shows a
Chiffre 1.
participant’s click in response to the query “where is the [objet]?” Plots of “where” data for all
our stimuli are accessible on our OSF repository (osf.io/nhj7k). Readers may also try each task
for themselves at: tb.perceptionresearch.org/what_is_where.
With regards to the center-of-mass model, we emphasize that the true center of mass cannot
be accurately recovered, and is also irrelevant even if it could be, as people have no direct
access to it. The primary aspect that matters for our analysis based on this model is people’s
subjective judgement of the center of mass, and how that relates to the perception of “where.”
To test the performance of our models, we first fit a Gaussian mixture model (GMM) to the
“where” data provided by participants for each object, such that we could compare distribu-
tions of participant responses (Chiffre 2). The number of mixtures was chosen via three-fold
cross-validation (for between 1 et 5 mixtures). We then calculated the mean negative log-
likelihood of our models under this GMM for “where” on each object. Enfin, we compared
the models using paired Wilcoxon signed-rank tests on the mean negative log-likelihood
scores to ask which model best predicted the “where” responses. All analysis plans, choice
of models, and experimental designs were pre-registered; materials and data are available at
osf.io/nhj7k.
In all three experiments, “where” responses were best predicted by center-of-mass
judgements, followed by spatial memory judgements and free-response clicks, respectivement
(Chiffre 3). The differences between these models was significant: physical reasoning was a
significantly better predictor of “where” than spatial memory across experiments (Experiment 1:
p < 0.01; Experiment 2: p < 0.001; Experiment 3: p < 0.001). Spatial memory in turn signifi-
cantly outperformed the free-response model, though the difference was slightly smaller
(Experiment 1: p = 0.01; Experiment 2: p = 0.04; Experiment 3: p < 0.01). The various
image-based models, while based on previous work and reasonable assumptions, performed
poorly by comparison.
Furthermore, our eighth model (where people would grab the object), which we pre-
registered and explored after testing our initial seven, performed significantly worse than
OPEN MIND: Discoveries in Cognitive Science
132
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
.
/
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
a
_
0
0
0
7
5
p
d
.
/
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
What is “Where”
Boger and Ullman
Schematic illustration of our modeling paradigm, using a line drawing of headphones
Figure 2.
as an example. First, we collect participant judgements for “where” an object is. After fitting a
Gaussian mixture to this data, we score a proposed model Mi under this Gaussian mixture, using
its negative log-likelihood.
our initial three human response-based models. In all three experiments, the grasping model
performed the worse than the center of mass, spatial memory, and “click anywhere” models
(p < 0.001 when compared to the center-of-mass model in each experiment).
We estimate ceiling performance as the log likelihood of people’s “where” judgements
under its own GMM—another model should not predict the “where” data better than the
“where” data itself. In Experiments 1 and 2, the “where” data was significantly more likely
under the GMM than the center of mass data (Experiment 1: p < 0.01; Experiment 2: p <
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
/
/
.
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
a
_
0
0
0
7
5
p
d
.
/
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Figure 3. Mean negative log-likelihood of our initial seven models in each experiment. In all three
experiments, the center-of-mass model performed significantly better than the other models. Under
each experiment’s results is a depiction of a banana in that experiment’s form of stimuli, overlaid with
“where” data. All analyses and stimuli are available at (osf.io/nhj7k).
OPEN MIND: Discoveries in Cognitive Science
133
What is “Where”
Boger and Ullman
0.01). However, in Experiment 3, we observe near-ceiling performance for the physical rea-
soning model, as its likelihood is not distinguishable from the likelihood of the “where” data
itself ( p = 0.43).
Though participants tend to click near the center of objects—perhaps leading to a bias
towards the center-of-mass model—this does not explain away our results. First, this bias of
clicking near the center of the objects would apply to all human-response models, not just the
center-of-mass model. Further, had this been the case, then simply predicting responses for
“where” by distance from the image centroid would be the best model. However, this was not
the case, suggesting that this preference for center of mass goes beyond mere clicking biases.
DISCUSSION
What is “where”? Our three experiments explore how we judge the location of objects and
find that, across a range of object realism, a judgement rooted in physical reasoning (center of
mass) is the strongest predictor of perceived object location. We suggest that judgements of
object location rely on physical properties. This idea echoes other work in visual perception,
neuroscience, and developmental psychology.
Recently, many researchers hypothesized that a mental “simulation engine” underlies much
of our intuitive physical reasoning (Battaglia et al., 2013; Fischer et al., 2016). The first step in
these mental simulation models assumes we de-render a visual image into a physical scene
representation, but this process is not yet formally solved. With a few exceptions (e.g., Boger &
Firestone, 2022; Little & Firestone, 2021), the question of how physical reasoning fits into
vision remains relatively unexplored.
Our results speak to a different direction in this process; we suggest that physical reasoning
and vision rely on each other, rather than one process exclusively relying on the other. This
relationship is strong enough that physical reasoning predicts perceived object locations better
than seemingly closer processes such as spatial memory and attention. The instructions for the
spatial memory judgements (“where was the object”), free-response judgements (“click any-
where on the object”), and “where” judgements (“where is the object”) are all semantically
similar, compared to the physical reasoning judgements (“click on the object’s center of
mass”). This makes our empirical findings all the more striking.
Beyond intuitive physical reasoning, our work adds a new angle to existing literature on
multiple object tracking (MOT) and object-based attention. For example, foundational work
in MOT suggests that attention is deployed to objects rather than features, implying that there is
a sort of physical “objectness” crucial to vision (Scholl et al., 2001). This tracking ability
persists dynamically through some physical events such as occlusion, but not others (such
as deletion) (Scholl & Pylyshyn, 1999). Such object-based attention even exists over object
representations implicitly created by perceptual completion (Moore et al., 1998). However,
much of these results exist over either dynamic objects (i.e., in the case of MOT) or abstract
objects. Here, we show the impact of physical “objectness” on the judgements of object loca-
tion in a simple, static paradigm involving everyday objects.
Our results also have analogs in neuroscience, further aligning with our proposed relation-
ship between physical reasoning and vision. For example, the MT complex—thought to be
responsible for motion perception—has been shown to mediate attentive tracking (Culham
et al., 1998). A large body of work has taken this classic split between the “what” and “where”
streams to include “how,” which modulates how we interact with objects, noting that people
can direct accurate motor movements at objects they fail to localize (Goodale & Milner, 1992;
OPEN MIND: Discoveries in Cognitive Science
134
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
.
/
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
a
_
0
0
0
7
5
p
d
.
/
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
What is “Where”
Boger and Ullman
Goodale et al., 1991; Kravitz et al., 2011). This matches our results that the “where” of objects
may be constrained by their physical behaviors.
At an even more basic level of representation, foundational work in infant cognition shows
that physical reasoning may supersede representations of object identity. Even when infants
forgot the features of a set of objects, they still expected them to remain physically consistent.
For example, infants who fail to notice changes in object shape are surprised to see the object
disappear entirely (Kibbe & Leslie, 2011; Zosh & Feigenson, 2012). This provides an even
richer demonstration of earlier work showing that infants’ representations of objects conform
to more foundational physical properties such as continuity and rigidity (Baillargeon et al.,
1985; Spelke et al., 1992; Spelke & Van de Walle, 1993). We suggest that such representations
persist across development (as in Kibbe, 2015) in even simpler ways than object tracking or
planning, and rather influence our judgements of object locations in simple, static settings.
Though our experiments covered a range of realism, they were still limited to static objects
with no background. Physical reasoning in the real world deals with complex scenes and mov-
ing objects. Future work may explore how dynamics, relations, and interactions affect judge-
ments of “where.” In everyday life, we do not recognize and locate a hammer as an isolated
object, but as a hammer next to a cup, behind a book, on a tiger, and so on (Hafri & Firestone,
2021). These relations require extracting rich physical and visual information that may affect
our perception of object location. For example, participating in a causal event such as a colli-
sion creates a reliable illusion in the spatial relations of two objects (Scholl & Nakayama, 2004).
Future work may explore how “where” changes if, rather than seeing a hammer with no back-
ground, we see a hammer supported by a table from below, or supported by a string from above.
Beyond the insights our results provide about physical reasoning and object location, they
raise intriguing questions about how “where” relates to “what.” For example, when judging
the location of a pineapple, people consistently clicked on its body, as if ignoring the stem on
top. What does this mean about the nature of how we perceive the pineapple? Judgements of
“where” may reveal a unique way to analyze the perceived essence of an object (Gelman,
2003). Because participants must choose only a single point on the object, they may ask them-
selves which part of the object most represents its essence. Perhaps, in line with work in infant
cognition and MOT, we represent the essence of objects not only by their visual features, but
also by their physical properties, in some cases even relying more on the latter than the former.
While our experiments ask each participant for a single judgement, our perception of
“where” likely depends on more than just a single point. This representation may instead
resemble a “point cloud.” However, we can treat each single-point estimate as a sample
drawn from such a cloud distribution, in line with other proposals on sampling-based cogni-
tion ( Vul et al., 2014). By aggregating judgements across participants, we generate well-
powered cumulative distributions of object location, in much the same way that cumulative
distributions reveal mathematically defined shape skeletons (Firestone & Scholl, 2014). In this
sense, our distributions recapture the potential point-cloud distributions, which turn out to be
neither uniform, nor skeletal.2
2 An additional way to address this point cloud hypothesis would be with a series of object localization tasks
that do not rely on clicking, such as a vernier acuity task (for review, see McKee & Westheimer, 1978). Relying
on two-alternative forced-choice responses for object positions eliminates aspects of the fine-grained modeling
approach we present here. However, it also presents a higher-level, coarser interpretation of object location;
future research may seek to use these types of paradigms to further our understanding of object localization. In
this work, we stick to clicking-based tasks given their simplicity and prevalence in related work, such as in
Firestone and Scholl (2014).
OPEN MIND: Discoveries in Cognitive Science
135
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
/
/
.
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
a
_
0
0
0
7
5
p
d
/
.
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
What is “Where”
Boger and Ullman
By modeling “where” in a simple and direct setting, we take a step towards understanding
how we represent object location. Our results reveal a surprising bidirectional relationship
between physical reasoning and visual perception. More broadly, we believe this work sug-
gests a novel avenue for future work on modeling “where” in vision. While it does not fully
resolve the question of what is “where,” it suggests where to look.
FREQUENTLY ASKED QUESTIONS
We thought it would be useful to directly address a few common questions and comments we
have received regarding this work. We hope this helps lead to open conversation with readers,
and serves as a “theoretical supplement.”
Surely people represent locations as more than a single dot, something more like an area-cloud?
We agree participant representations of “where” may involve multiple locations on the object,
rather than the single location we ask each participant to produce. But, we believe these single
point estimates form well-powered point clouds, which together reflect the “where”
distribution.
In many ways, giving participants the option to click on the object is the best solution to
such a problem. First, such issues exist in other single-choice clicking tasks (e.g., Firestone &
Scholl, 2014) which also find mathematically strong distributions. Second, clicking tasks give
participants maximum flexibility to represent this single location as best they can, whereas, for
example, a forced-choice task adds ambiguity to this point-cloud across participants.
Wouldn’t any dot on the image be a valid answer? If I point to any part of an image and ask “is this the
[object]” the answer should be “yes”
In principle, valid “where” responses would be any location on the surface or edges of the
object (though in our experiments people also point to empty areas, such as the middle of
a bicycle). In practice, this is not what people do when generating responses. Under the
hypothesis that any image part is a valid answer, people would conflate “where” with “any
non-background pixel,” and responses should then either form a uniform distribution across
the object (a uniform point cloud), or the single-best error-minimizing point sample from that
cloud (the image center). We don’t observe either of these. Rather, we see that center of mass is
highly predictive of “where” responses.
Is this about vision? Isn’t this actually about social things, such as communication?
We do not know for sure that our results contain no social component, and it would be inter-
esting if they did. However, we cannot think of a theoretical account at the moment for how
social features explain our results, and dictate people’s responses in a way that a hypothetical
“social-free” version would not. Put as a question, why would “point an object out to some-
one” cause participants to produce clicks that match judgements about center of mass (a non-
social judgement), but simply locating an object for yourself result in different judgements?
Also, such social or communication components exist (via task demands) in other studies
that are taken to be about vision, and cannot be fully removed. For example, (Firestone &
Scholl, 2014)—who ran similar tasks to explore shape skeletons in the visual system—ask par-
ticipants to tap anywhere on a shape. Though there is no language about “pointing it out to
someone,” the experiments do require participants to tap the shape on an iPad held by an
OPEN MIND: Discoveries in Cognitive Science
136
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
/
.
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
a
_
0
0
0
7
5
p
d
.
/
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
What is “Where”
Boger and Ullman
experimenter, requiring some form of pointing it out to, and communicating with the
experimenter.
More broadly, the question about whether this is actually about vision in turn raises the
question of what vision is, and a classic answer has been “vision is about what is where,”
bringing us full circle.
Have you considered [this other model] instead?
In this work, we analyzed eight different models, which is straining a short paper. We chose
these models to form an encompassing package, while trying to not be overbearing, and not
claiming to be exhaustive. In the process, it’s quite possible we left out other reasonable
models.
We’re happy to explore new models, or additions to the current models. We also encourage
proposals for why our existing models work or don’t work. We believe part of the appeal of this
work is in spurring new directions. However, we have two suggestions for any new models or
proposals.
First, new models or proposals should match the data already at hand, at a basic level. For
example, several proposals beyond our set turn out to be equivalent to a uniform distribution
or center-of-image model, which does not match the existing data. We considered this above,
in the interpretation that “where” ambiguously leads to “any non-background pixel,” and
we’ve also come across proposals that people might “minimize the error of a mis-click,” which
turn out to be similar.
Second, new models or proposals should be able to generalize in a way that can capture
both our broad stimulus set, and visual representations more generally. This is perhaps a main
pitfall of our eighth model, that asks participants where they would grab the object. Many
objects in our stimulus set (and the world) are not graspable, especially the crude forms we
use in Experiment 3.
We invite interested readers to test new models and proposals; all our data and exper-
imental code are available on our OSF repository (osf.io/nhj7k).
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
.
/
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
a
_
0
0
0
7
5
p
d
/
.
i
How do we know participants are calculating the center of mass accurately? Why not calculate the true
center of mass, instead of relying on people’s judgements?
We would stress that a “true” center of mass cannot be calculated from our images, given that
the weight of each object part is unknown. So, there is no way to know such calculations are
capturing a ground truth. (Though previous work has shown that people accurately judge an
object’s center of mass (Cholewiak et al., 2015).) More importantly, even if we could calculate
the true center of mass, it would be irrelevant for judgements of “where.” People do not have
access to the ground-truth center of mass beyond the mental calculations they perform in the
task asking them to estimate the center of mass, which is what we asked them to do.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
How do we know participants are not merely clicking on the center of the object for “where,” and that’s
why center of mass is the best model?
As with the above question of additional models, we believe that this concern would need to
be first validated by the data. Before performing any analysis, we can see that people are not
merely clicking on the object’s center, and rather that the clicks possess a unique distribution
which seems to have some structure.
OPEN MIND: Discoveries in Cognitive Science
137
What is “Where”
Boger and Ullman
However, this concern can also be tested empirically; if the main reason the center-of-mass
model predicts the “where” data well is because of a bias to click towards the center, then a
model predicting “where” clicks using the image centroid should perform the strongest. How-
ever, this is not the case, as it performs significantly worse than all human response-based
model.
Finally, if such a center bias existed in the “where” clicks, it would likely extend to other
models. It is especially hard to explain why such a bias would not extend to the “click any-
where” model (and why that model is not the strongest) under this explanation; the instructions
for the “click anywhere” and “where” tasks are almost identical, such that a center bias in one
should extend to the other if it existed. However, this is not what we observe, so we believe
this concern is unsubstantiated by our data.
MATERIALS AND METHODS
Participants
Each of the three experiments recruited 50 unique participants for each of the tasks and each
of the three forms of stimuli (“click where the object is,” “click on the object’s center of mass,”
“click where the object was,” “click anywhere on the object,” and “click where you would
grab the object to pick it up”; total n = 750). All participants were recruited from the online
platform Prolific (for a discussion of the reliability of this subject pool, see Peer et al., 2017).
Unique participants were used for each condition and experiment such that no participant
appeared in more than one model or in both the dependent and independent variables.
Participants were excluded if they did not contribute a complete dataset or if they clicked
the same location in five consecutive trials.
Stimuli
Line drawings for Experiment 1 were taken from The Noun Project. Object images for Exper-
iment 2 were taken from a variety of online sources. The kinds of objects in Experiment 2 were
the same as those in Experiment 1 (i.e., if Experiment 1 included a line drawing of a gorilla,
Experiment 2 included a real image of a gorilla). The masked objects for Experiment 3 were
created by applying a random mask to the line drawings, then vertically flipping them to
remove any identifying information. The images were randomly padded both vertically and
horizontally such that responding in the center of the screen each time would not produce
reasonable data. All images were 500 × 500 pixels large in the participant’s web browser.
Note that unique participants are assigned to each condition, where they then see all the
stimuli in the given form and answer the given question. In other words, a participant in the
Experiment 1 “center of mass” conditions will see 50 line drawings and click on their center of
mass; they will not see any images of other types or be told to click according to different
instructions. The same set of 50 images are used across all conditions in a given experiment.
Design and Procedure
Participants saw 50 images in each experiment. The order of the images was randomized.
When gathering judgements for “where,” we instructed participants as follows: “Your friend
asks: ‘where is the [object]?’. Click on where you would point to.” In the “center of mass”
condition, participants were told to “Click on the center of mass of the [object].” Participants
in this condition were provided with an additional instruction of what center of mass means
(“average position of all the mass in the object”). Though we cannot calculate the “accuracy”
OPEN MIND: Discoveries in Cognitive Science
138
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
/
/
.
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
a
_
0
0
0
7
5
p
d
/
.
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
What is “Where”
Boger and Ullman
of these responses (given that we cannot calculate a true center of mass from images), the
responses appear consistent and reasonable (and previous work shows such judgements are
fairly consistent; Cholewiak et al., 2015). In the spatial memory condition, the object appeared
for 1000 ms, during which time the participant’s mouse was hidden and immovable. The
object then disappeared and participants were instructed as follows: “Your friend asks: ‘where
was the [object]?’. Click on where you would point to.” In the “click anywhere” condition,
participants were told to “Click anywhere you want on the [object].” Finally, the “grasp” con-
dition instructed participants to “Click where you would grab the [object] to pick it up.”
Data Availability
All data, code, materials, and pre-registrations are available at osf.io/nhj7k. Readers can also
do the tasks for themselves at tb.perceptionresearch.org/what_is_where.
ACKNOWLEDGMENTS
For helpful discussion and comments on previous drafts, we thank Sami Yousif, Chaz Firestone,
members of the Harvard CoCoDev lab, and members of the Computation and Language
Lab at UC Berkeley.
FUNDING INFORMATION
TU is supported by NSF Science Technology Center Award CCF-1231216, the DARPA
Machine Common Sense program, and the Jacobs Foundation.
AUTHOR CONTRIBUTIONS
TB carried out the experiments, analyzed the data, and wrote the first draft of the manuscript.
TB and TU jointly edited the paper and designed the research.
REFERENCES
Baillargeon, R., Spelke, E. S., & Wasserman, S. (1985). Object per-
manence in five-month-old infants. Cognition, 20(3), 191–208.
https://doi.org/10.1016/0010-0277(85)90008-3, PubMed:
4064606
Bar, M., & Ullman, S. (1996). Spatial context in recognition. Percep-
tion, 25(3), 343–352. https://doi.org/10.1068/p250343, PubMed:
8804097
Battaglia, P. W., Hamrick, J. B., & Tenenbaum, J. B. (2013). Simu-
lation as an engine of physical scene understanding. Proceedings
of the National Academy of Sciences, 110(45), 18327–18332.
https://doi.org/10.1073/pnas.1306572110, PubMed: 24145417
Boger, T., & Firestone, C. (2022). Automatic simulation of unseen
physical events. Journal of Vision, 22(14), 3637. https://doi.org
/10.1167/jov.22.14.3637
Cholewiak, S. A., Fleming, R. W., & Singh, M. (2013). Visual per-
ception of the physical stability of asymmetric three-dimensional
objects. Journal of Vision, 13(4), 12. https://doi.org/10.1167/13.4
.12, PubMed: 23509408
Cholewiak, S. A., Fleming, R. W., & Singh, M. (2015). Perception
of physical stability and center of mass of 3-D objects. Journal of
Vision, 15(2), 13. https://doi.org/10.1167/15.2.13, PubMed:
25761331
Culham, J. C., Brandt, S. A., Cavanagh, P., Kanwisher, N. G.,
Dale, A. M., & Tootell, R. B. (1998). Cortical fMRI activation
produced by attentive tracking of moving targets. Journal of
Neurophysiology, 80(5), 2657–2670. https://doi.org/10.1152/jn
.1998.80.5.2657, PubMed: 9819271
Firestone, C., & Keil, F. C. (2016). Seeing the tipping point: Balance
perception and visual shape. Journal of Experimental Psychology:
General, 145(7), 872–881. https://doi.org/10.1037/xge0000151,
PubMed: 27348290
Firestone, C., & Scholl, B. J. (2014). “Please tap the shape, any-
where you like”: Shape skeletons in human vision revealed by
an exceedingly simple measure. Psychological Science, 25(2),
377–386. https://doi.org/10.1177/0956797613507584,
PubMed: 24406395
Fischer, J., Mikhael, J. G., Tenenbaum, J. B., & Kanwisher, N.
(2016). Functional neuroanatomy of intuitive physical inference.
Proceedings of the National Academy of Sciences, 113(34),
E5072–E5081. https://doi.org/10.1073/pnas.1610344113,
PubMed: 27503892
Gelman, S. A. (2003). The essential child: Origins of essentialism in
everyday thought. Oxford University Press. https://doi.org/10
.1093/acprof:oso/9780195154061.001.0001
Goodale, M. A., & Milner, A. D. (1992). Separate visual pathways
for perception and action. Trends in Neurosciences, 15(1),
20–25. https://doi.org/10.1016/0166-2236(92)90344-8,
PubMed: 1374953
Goodale, M. A., Milner, A. D., Jakobson, L. S., & Carey, D. P.
(1991). A neurological dissociation between perceiving objects
OPEN MIND: Discoveries in Cognitive Science
139
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
/
/
.
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
a
_
0
0
0
7
5
p
d
/
.
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
What is “Where”
Boger and Ullman
and grasping them. Nature, 349(6305), 154–156. https://doi.org
/10.1038/349154a0, PubMed: 1986306
Hafri, A., & Firestone, C. (2021). The perception of relations. Trends
in Cognitive Sciences, 25(6), 475–492. https://doi.org/10.1016/j
.tics.2021.01.006, PubMed: 33812770
Huttenlocher, J., Hedges, L. V., & Duncan, S. (1991). Categories
and particulars: Prototype effects in estimating spatial location.
Psychological Review, 98(3), 352–376. https://doi.org/10.1037
/0033-295X.98.3.352, PubMed: 1891523
Kibbe, M. M. (2015). Varieties of visual working memory repre-
sentation in infancy and beyond. Current Directions in Psycho-
logical Science, 24(6), 433–439. https://doi.org/10.1177
/0963721415605831
Kibbe, M. M., & Leslie, A. M. (2011). What do infants remember
when they forget? Location and identity in 6-month-olds’ memory
for objects. Psychological Science, 22(12), 1500–1505. https://
doi.org/10.1177/0956797611420165, PubMed: 22095976
Kravitz, D. J., Saleem, K. S., Baker, C. I., & Mishkin, M. (2011). A
new neural framework for visuospatial processing. Nature
Reviews Neuroscience, 12(4), 217–230. https://doi.org/10.1038
/nrn3008, PubMed: 21415848
Langlois, T. A.,
Jacoby, N., Suchow,
J. W., & Griffiths, T. L.
(2021). Serial reproduction reveals the geometry of visuospa-
tial representations. Proceedings of the National Academy of
Sciences, 118(13), e2012938118. https://doi.org/10.1073/pnas
.2012938118, PubMed: 33771919
Little, P. C., & Firestone, C. (2021). Physically implied surfaces. Psy-
chological Science, 32(5), 799–808. https://doi.org/10.1177
/0956797620939942, PubMed: 33792421
Marr, D. (1982). Vision: A computational investigation into the
human representation and processing of visual information. W. H.
Freeman.
McKee, S. P., & Westheimer, G. (1978). Improvement in vernier
acuity with practice. Perception & Psychophysics, 24(3),
258–262. https://doi.org/10.3758/BF03206097, PubMed: 704286
Moore, C. M., Yantis, S., & Vaughan, B. (1998). Object-based visual
selection: Evidence from perceptual completion. Psychological
Science, 9(2), 104–110. https://doi.org/10.1111/1467-9280
.00019
Peer, E., Brandimarte, L., Samat, S., & Acquisti, A. (2017). Beyond
the Turk: Alternative platforms for crowdsourcing behavioral
research. Journal of Experimental Social Psychology, 70,
153–163. https://doi.org/10.1016/j.jesp.2017.01.006
Schneider, G. E. (1969). Two visual systems: Brain mechanisms for
localization and discrimination are dissociated by tectal and
cortical lesions. Science, 163(3870), 895–902. https://doi.org
/10.1126/science.163.3870.895, PubMed: 5763873
Scholl, B. J., & Nakayama, K. (2004). Illusory causal crescents:
Misperceived spatial relations due to perceived causality. Percep-
tion, 33(4), 455–469. https://doi.org/10.1068/p5172, PubMed:
15222393
Scholl, B. J., & Pylyshyn, Z. W. (1999). Tracking multiple items
through occlusion: Clues to visual objecthood. Cognitive Psy-
chology, 38(2), 259–290. https://doi.org/10.1006/cogp.1998
.0698, PubMed: 10090804
Scholl, B. J., Pylyshyn, Z. W., & Feldman, J. (2001). What is a visual
object? Evidence from target merging in multiple object tracking.
Cognition, 80(1–2), 159–177. https://doi.org/10.1016/S0010
-0277(00)00157-8, PubMed: 11245843
Spelke, E. S., Breinlinger, K., Macomber, J., & Jacobson, K. (1992).
Origins of knowledge. Psychological Review, 99(4), 605–632.
https://doi.org/10.1037/0033-295X.99.4.605, PubMed: 1454901
Spelke, E. S., & Van de Walle, G. (1993). Perceiving and reasoning
about objects: Insights from infants. In N. Eilan, R. A. McCarthy,
& B. Brewer (Eds.), Spatial representation: Problems in philosophy
and psychology (pp. 132–161). Blackwell.
Vishwanath, D., & Kowler, E. (2003). Localization of shapes: Eye
movements and perception compared. Vision Research, 43(15),
1637–1653. https://doi.org/10.1016/S0042-6989(03)00168-8,
PubMed: 12798146
Vul, E., Goodman, N., Griffiths, T. L., & Tenenbaum, J. B. (2014).
One and done? Optimal decisions from very few samples. Cog-
nitive Science, 38(4), 599–637. https://doi.org/10.1111/cogs
.12101, PubMed: 24467492
Zosh, J. M., & Feigenson, L. (2012). Memory load affects object
individuation in 18-month-old infants. Journal of Experimental
Child Psychology, 113(3), 322–336. https://doi.org/10.1016/j
.jecp.2012.07.005, PubMed: 22932473
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
.
/
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
7
5
2
0
8
3
7
5
7
o
p
m
_
a
_
0
0
0
7
5
p
d
.
/
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
OPEN MIND: Discoveries in Cognitive Science
140