REPORT
Computing Joint Action Costs: Co-Actors
Minimize the Aggregate Individual
Costs in an Action Sequence
Georgina Török1
, Oana Stanciu1, Natalie Sebanz1, and Gergely Csibra1,2
1Department of Cognitive Science, Central European University
2Department of Psychological Sciences, Birkbeck, University of London
un accès ouvert
journal
Mots clés: joint action, cost computation, efficiency, decision making, cooperation
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
/
e
d
toi
o
p
m
je
/
je
un
r
t
je
c
e
–
p
d
F
/
d
o
je
/
je
/
/
.
1
0
1
1
6
2
o
p
m
_
un
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
un
_
0
0
0
4
5
p
d
.
/
je
ABSTRAIT
Successful performance in cooperative activities relies on efficient task distribution between
co-actors. Previous research found that people often forgo individual efficiency in favor of
co-efficiency (c'est à dire., joint-cost minimization) when planning a joint action. The present study
investigated the cost computations underlying co-efficient decisions. We report a series of
experiments that tested the hypothesis that people compute the joint costs of a cooperative
action sequence by summing the individual action costs of their co-actor and themselves. Nous
independently manipulated the parameters quantifying individual and joint action costs and
tested their effects on decision making by fitting and comparing Bayesian logistic regression
models. Our hypothesis was confirmed: people weighed their own and their partner’s costs
similarly to estimate the joint action costs as the sum of the two individual parameters.
Participants minimized the aggregate cost to ensure co-efficiency. The results provide
empirical support for behavioral economics and computational approaches that formalize
cooperation as joint utility maximization based on a weighted sum of individual action costs.
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
INTRODUCTION
Humans cooperate by sharing goals with others, and by planning and coordinating actions with
their partners to achieve these goals (Bratman, 1992; Butterfill, 2017; Sebanz et al., 2006).
Everyday social interactions, such as assembling furniture with a friend, or cooking a meal
ensemble, attest to the complexity of planning required in cooperative activities. Par exemple,
family members might share the overarching goal of cooking a paella: each of them represents
and works toward specific subgoals (par exemple., chopping vegetables), and they need to distribute the
necessary actions among themselves. Many subtasks contribute to the joint goal of cooking a
paella. Accordingly, these actions may be executed in many different ways, with varying
degrees of efficiency. When people distribute subtasks between themselves, the individual
efficiencies of co-actors often depend on each other; in some situations, they are inversely
related. C'est, because a complex joint action may be composed of many interdependent
subtasks, performing a less effortful subtask may force the other person to contribute a more
effortful complementary action to ensure the success of the joint action.
Citation: Török, G., Stanciu, O., Sebanz,
N., & Csibra, G. (2021). Computing Joint
Action Costs: Co-Actors Minimize the
Aggregate Individual Costs in an
Action Sequence. Open Mind:
Discoveries in Cognitive Science,
5, 100–112. https://est ce que je.org/10.1162
/opmi_a_00045
EST CE QUE JE:
https://doi.org/10.1162/opmi_a_00045
Supplemental Materials:
https://doi.org/10.1162/opmi_a_00045;
https://osf.io/r6mz3/?view_only
=3f5fc782dac242adbe02bf3bc48158b0
Reçu: 29 Juillet 2020
Accepté: 9 Juillet 2021
Intérêts concurrents:
The authors declare no conflict
of interest.
Auteur correspondant:
Georgina Török
torokgeorgina@gmail.com
droits d'auteur: © 2021
Massachusetts Institute of Technology
Publié sous Creative Commons
Attribution 4.0 International
(CC PAR 4.0) Licence
La presse du MIT
Computing Joint Action Costs
Török et al.
Planning cooperative sequences can be regarded as making a series of decisions about
actions to be performed by co-actors (cf. Wolpert & Landy, 2012, on individual motor planning).
What principles guide people’s decision making? Previous studies suggest that co-actors tend to
maximize the joint efficiency of an action sequence by minimizing the total costs of movements
when they work toward a shared goal (Kleiman-Weiner et al., 2016; Santamaria & Rosenbaum,
2011; Török et al., 2019). These findings are paralleled by evidence that in certain economic
games, people sometimes make decisions consistent with a collective utility-maximizing strat-
egy based on team reasoning (Sugden, 2003), rather than choosing individual utility-maximizing
solutions (Colman et al., 2008). We argue that such behaviors do not only appear in contexts
with financial rewards at stake.
In the joint action task of Török and colleagues (2019) participants made binary decisions
between two action plans to coordinate their hand movements with a partner in a sequential
manière. One of the two options was more efficient for the decision-making actor (c'est à dire., the initiator
of the action sequence), the other option was more efficient for her partner, therefore the jointly
efficient plan was more individually efficient for either the decision maker or for the partner. Le
participants tended to make co-efficient (c'est à dire., jointly efficient) rather than individually efficient
decisions that would have either maximized personal efficiency or would have altruistically
increased the utility of a partner (cf. Axelrod & Hamilton, 1981; Trivers, 1971). The present study
investigated the computations behind decisions that minimize the aggregate costs of the group.
To minimize a dyad’s costs in action planning, a decision maker first needs to estimate them
(Conduite & Wolpert, 2006). In the case of joint actions, we assume that the expected individual
costs of potential joint action sequences are integrated to achieve optimal decisions. People are
sensitive to their real or virtual partner’s individual efforts, needs, and task difficulty (Chennells &
Michael, 2018; Ray et al., 2017; Ray & Welsh, 2011). We hypothesize that, whenever this is
calculable, the costs of joint actions are estimated as the summed total of individual costs.
This proposal is compatible with computational work in which joint utility is represented as
the weighted sum of the individual utilities of each agent (Kleiman-Weiner et al., 2016).
While assessing and summing individual costs may be a generic process to achieve co-
efficiency (applicable when we conceptualize the joint cost estimation problem in the abstract,
akin to a mathematical problem of combining two quantities), depending on the actual context,
shortcuts may also be available. Par exemple, the task in our study (Török et al., 2019) required
two actors to move an object along one of two paths by taking turns. While the movement was
divided between the participants, the decision-making actor could have planned the joint action
sequence as if she had intended to complete the task alone, and then performed only the first
section of the plan. Such a planning process would result in choosing the co-efficient action
option from the alternatives without requiring the planner to sum individual costs.
In the present study, we employed a task in which joint action costs cannot be computed
without representing and summing two individual action costs. The participants had to move
objects on a touchscreen sequentially,1 and the cost of this action was assumed to be propor-
tional to the path length of movement. Surtout, the physical separation of paths to be taken by
co-actors made it impossible to plan a single action that incorporated both paths. This feature of
the task enabled us to generate, and parametrically vary, individual and joint action costs in
various ways. Since a priori we could not exclude the possibility that participants might adapt
1 Despite its sequential nature, we consider this a joint action. For an action to qualify as joint action, a goal
that is not individual but shared between co-actors should be present. In our task, the interdependence of the
two individual actions to reach the goal of matching object pairs ensures that there is a joint goal.
OPEN MIND: Discoveries in Cognitive Science
101
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
/
e
d
toi
o
p
m
je
/
je
un
r
t
je
c
e
–
p
d
F
/
d
o
je
/
je
/
.
/
1
0
1
1
6
2
o
p
m
_
un
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
un
_
0
0
0
4
5
p
d
/
.
je
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Computing Joint Action Costs
Török et al.
to the correlational structure of the cost parameters during the experiment, we used separate
participant samples for three versions of the task in which pairs of cost parameters were decorre-
en retard. We observed highly consistent results across experiments, and thus we report the analyses
of pooled data. The individual experiments’ details are available in the Supplemental Materials
(section S3 and Table S3.1).
If people represent the joint costs of an action sequence as a weighted sum of individual
frais, choices between action plans should be consistent with a co-efficiency-maximizing
strategy that minimizes this sum. We hypothesized that, in the absence of asymmetries in social
hierarchy (Kleiman-Weiner et al., 2016), the individual costs of the actors would be weighed
equally in the sum.
We also investigated an alternative hypothesis, according to which the equality of contribu-
tion matters more than the efficiency of joint performance. People are often motivated to reduce
payoff inequality in economic games (Dawes et al., 2007; Fehr & Schmidt, 1999), and it is pos-
sible that in a joint action context they minimize the difference in the action costs distributed
across co-actors rather than maximizing the expected utility of the dyad. Such decisions may
be based on a motivation to be fair to an interaction partner (Rand et al., 2013), although recent
results support the co-efficiency hypothesis against the trial-based fairness account (Strachan &
Török, 2020).
MÉTHODES
Participants
We recruited participants through Central European University’s Research Participation System
(SONA Systems) and a student job agency. They gave their informed consent and received
vouchers for their participation. The study was approved by the United Ethical Review
Committee for Research in Psychology (EPKEB) in Hungary. To ensure that the present study
was adequately powered to make inferences in the Bayesian model, the target sample size
was set to 20 dyads (40 participants) per experiment, a larger sample size relative to our previous
étude (Török et al., 2019). We present the data of 120 participants (82 females, 2 preferred not to
specify; Mage = 23.81 années, SD = 4.07) (see section S1.1 for descriptions of exclusions).
Apparatus
The task was performed on a touchscreen monitor (Iiyama PROLITE 46″, resolution 1920 ×
1080 pixels, separate sync-horizontal: 31.47–67.5 KHz, vertical: 47–63 Hz) lying flat on a table
between two participants facing each other. Stimulus presentation and data recording were
controlled by a script using the Psychophysics Toolbox (Brainard, 1997; Kleiner et al., 2007; Pelli,
1997) in MATLAB®. Two response boxes (Black Box Toolkit Ltd.) were used to control trial onset.
Stimuli and Task
On each trial, a layout displaying the following elements was presented to the participants: (1)
a thin black wall dividing the screen into the two participants’ task areas, (2) two pairs of black
target objects (two circles and two squares, 30 px diameter) distributed between the task areas,
et (3) two black-bordered octagonal starting locations (96 × 96 px) with another, petit
octagon inside (60 × 60 px, Chiffre 1). The starting locations were always displayed at mid-
position along the longer sides of the screen, aligned with the response box buttons.
OPEN MIND: Discoveries in Cognitive Science
102
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
/
e
d
toi
o
p
m
je
/
je
un
r
t
je
c
e
–
p
d
F
/
d
o
je
/
je
/
/
.
1
0
1
1
6
2
o
p
m
_
un
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
un
_
0
0
0
4
5
p
d
/
.
je
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Computing Joint Action Costs
Török et al.
Chiffre 1. An example of the layouts presented to the participants. Starting locations were indi-
cated by the octagons, and the locations of the two pairs of black target objects (circles and squares)
were generated by stochastic selection processes. The arrows and labels (not shown to the partic-
ipants) indicate the distances between the starting locations and the target objects, which provided
the basis for cost calculations comparing the two target options.
Participants were instructed to keep their dominant index finger on the button of their response
boxes to trigger the start of each trial. At the beginning of each trial, one of the smaller octagons
was orange-colored to signal which participant would initiate the joint action as Actor 1. In each
trial, Actor 1 had to choose between the two target objects on her side and drag it back to her
starting location. The participants were instructed to inspect the layout while the octagon was
orange-colored, and to decide which target object they would pick up when prompted to move.
After 3 s, the color switched to green, which served as a cue for Actor 1 to start moving. Par
dragging the green octagon over a black object with her index finger, the participant picked up
the object and collected it by transferring it back to her starting location. Once Actor 1 collected
one of the objects, she pressed the button on her response box again to make the white octagon
in front of her partner (Actor 2) turn green. The appearance of this second green octagon cued
Actor 2 to start moving to collect the matching object in his task area. The trial was over
when Actor 2 collected the object with the shape corresponding to the one chosen by Actor 1
(nonmatching objects did not respond to dragging). Ainsi, while both participants acted in each
trial, only Actor 1 made the decision that determined the individual and joint costs incurred
during the completion of the task.
Design
We considered the cost of an action as a monotonic function of the path length that the object
covered on the touchscreen when dragged, et, for the sake of simplicity, we treated the path
length as the absolute cost paid for its transport. Par exemple, in Figure 1, the cost of choosing
object A1 (the square) is the distance between Actor 1’s starting location and this square: a1. If
Actor 1 makes her decision based on her expected cost, she should compare this cost to the cost
of moving object B1: b1. The cost disparity between these actions is expressed by their differ-
ence: a1 − b1. We call this value Self Cost Disparity, or simply Self Disparity. If Actor 1 intends to
make individually efficient decisions, she should choose A1 as the target when the Self Cost
Disparity is negative, and B1 when this value is positive (as is the case in Figure 1). The matching
individual cost disparity for Actor 2 (Other Disparity, a2 − b2) in this example is negative. Ainsi,
OPEN MIND: Discoveries in Cognitive Science
103
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
/
e
d
toi
o
p
m
je
/
je
un
r
t
je
c
e
–
p
d
F
/
d
o
je
/
je
.
/
/
1
0
1
1
6
2
o
p
m
_
un
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
un
_
0
0
0
4
5
p
d
.
/
je
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Computing Joint Action Costs
Török et al.
picking up object B1 would be individually optimal for Actor 1 because it minimizes her Self
Disparity, whereas it is the less efficient option for Actor 2.
The joint cost of an action is taken to be the summed costs of the actors. If Actor 1 chooses
A1, the joint cost is a1 + a2; if she chooses B1, the joint cost is b1 + b2. Ainsi, the Joint Cost
Disparity (or Joint Disparity) est (a1 + a2) − (b1 + b2), which is the sum of the two individual
disparities (Self Disparity and Other Disparity). In the example arrangement (Chiffre 1), the Joint
Disparity is negative, suggesting that from the dyad’s perspective, collecting the square objects
was associated with the shorter total path length, and as such, was the co-efficient choice. À
the same time, picking up the square object pair was also individually efficient for Actor 2
(negative Other Disparity), but not for Actor 1 (positive Self Disparity).
We assume that the likelihood of choosing object A1, which was always the square in the
decision maker’s side of the screen, parametrically depends on the magnitude of one or more of
these disparities through a logistic link function. Par exemple, if Actor 1 optimizes her own cost,
the more negative the value of Self Disparity, the more likely it is that she will choose A1, forcing
Actor 2 to act on A2.
To generate the target objects’ locations, we first sampled Self Disparity and Other Disparity
(section S1.2 reports details of the sampling procedure). The positions of the objects were then
randomly selected to match these disparities. For each dyad, 100 different spatial arrange-
ments were generated and repeated, once per each participant acting as Actor 1. Trial order
was pseudorandomized, with the constraint that neither of the participants be assigned the role
of Actor 1 more than three times in a row.
To address our alternative hypothesis, we operationalized Fairness as the difference between
the asymmetries in individual paths related to object pair A and object pair B distributed between
co-actors in each trial: the difference between [abs(a1 − a2)] et [abs(b1 − b2)] (Chiffre 1).
Choices were considered “fair” if the object Actor 1 picked up was associated with a relatively
smaller difference in the path lengths between Actors 1 et 2 than the path length difference
associated with the alternative object. When the fairness measure was negative, choosing
object A1 was the fair option; when positive, object B1 was fair.
Procedure
Before the object matching task, the participants read step-by-step instructions on how to
complete a trial. They were instructed to collect matching object pairs by cooperating with
their partner, without communicating, and to complete each trial as quickly as possible.
The participants first completed six practice trials to familiarize themselves with the task,
the touchscreen, and the response box buttons. They then completed the main task (sur
average in M = 34.62 minutes, SD = 4.99) without receiving any feedback.
Data Analysis
To test whether object choices were influenced primarily by the difference between joint
action costs, rather than between the individual costs of Actor 1 or Actor 2, we fitted and
contrasted three mixed-effects logistic regression models using a Bayesian estimation tech-
nique (Kruschke, 2015; details of the hierarchical model are reported in S1.3). Spécifiquement,
the probability of choosing object A1 was predicted, à son tour, par (1) Self Disparity, (2) Other
Disparity, et (3) a weighted linear combination of the Self and Other Disparities. We expected
that the third model would have the best fit to the data, since it is the only one that can express
the co-efficient strategy, which dictates that actors should equally weigh their own and their
OPEN MIND: Discoveries in Cognitive Science
104
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
/
e
d
toi
o
p
m
je
/
je
un
r
t
je
c
e
–
p
d
F
/
d
o
je
/
je
/
.
/
1
0
1
1
6
2
o
p
m
_
un
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
un
_
0
0
0
4
5
p
d
.
/
je
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Computing Joint Action Costs
Török et al.
partner’s cost disparities. En plus, we fitted models that predicted choices by (4) Fairness
or by (5) the linear combination of Self and Other Disparities and Fairness.
The posterior distributions of the beta coefficients were estimated in JAGS (Plummer, 2003)
with the runjags package in R (Denwood, 2016). We report the population-level estimates. À
compare models, we calculated leave-one-out cross-validation measures (LOO-CV; Gelman
et coll., 2014; Vehtari et al., 2017) using the loo package in R ( Vehtari et al., 2020). For each
model, we report an estimation of the expected log predictive density converted to the devi-
ance scale (c'est à dire., multiplied by −2), so that it is comparable to other information criteria. Le
lower this leave-one-out information criterion (LOOIC) for a model, the better its expected
accuracy at out-of-sample prediction of future data. We also compared area under the curve
(AUC) measures for each model (Fawcett, 2006), quantifying model fit to the observed data.
We base model comparison on the AUC and LOOIC (see Table S2.1).
RÉSULTATS
Descriptive Statistics
The participants chose object A1 on 49.7% of trials. The individual object choice proportions
were not different from chance ( Wilcoxon signed-rank test against 0.5: V = 2724, p = .726,
rank-biserial correlation r = −.25, 95% Intervalle de confiance (CI) for proportion .50 = [.49, .51]).
Cost-Minimization The magnitudes of cost disparities strongly influenced object choices.
Dans l'ensemble, participants chose the object resulting in a co-efficient action sequence 77% of the
temps (95% CI for proportion .77 = [.76, .79]), which was significantly higher than chance at
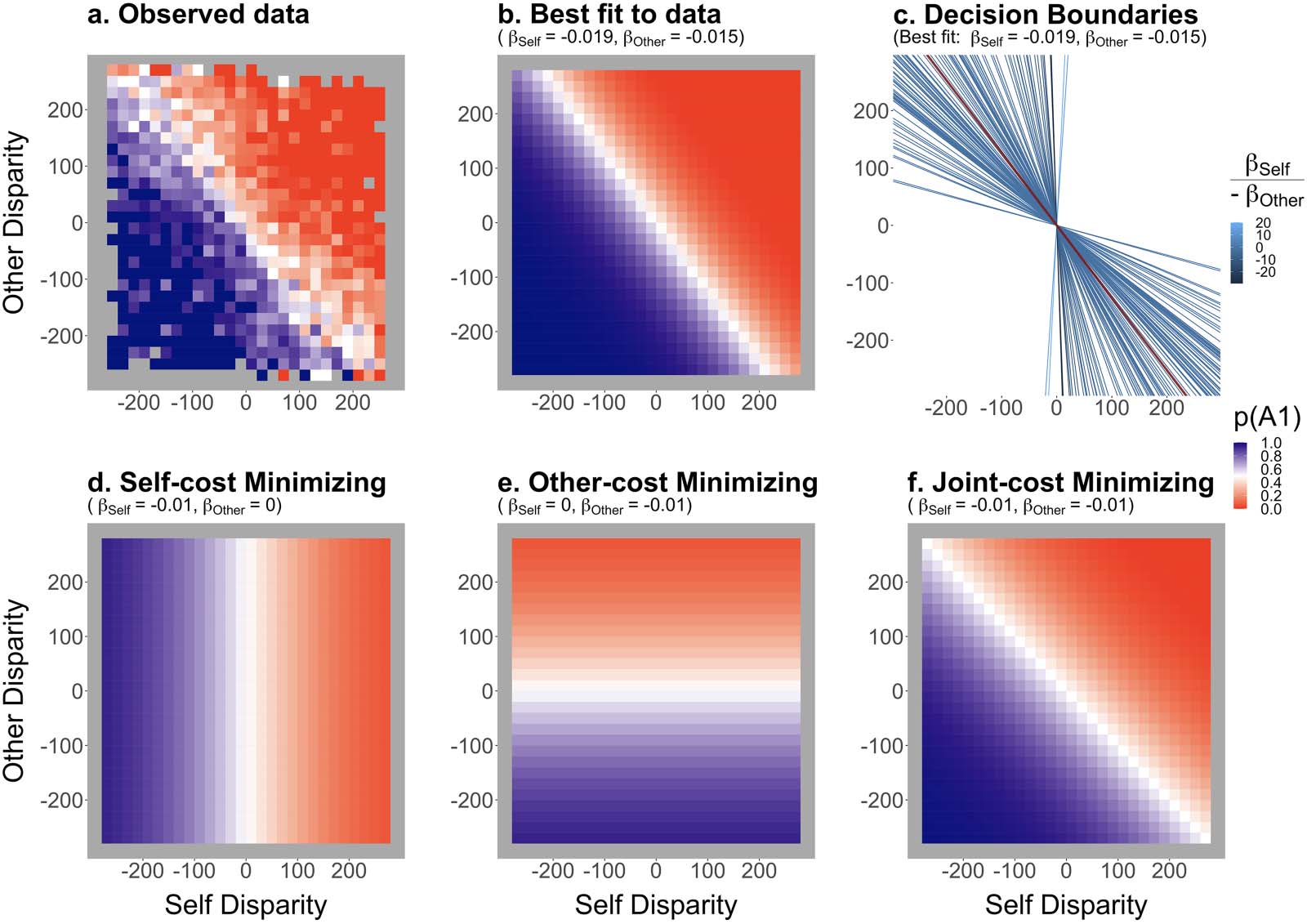
66%2 (V = 7260, p < .001, r = 1.00). The participants’ decisions are illustrated in Figure 2a,
together with the predictions calculated for each cost-minimizing strategy (Figure 2d–f).
Fairness The participants made fair choices 47.5% of the time (95% CI for proportion .48 = [.46,
.50]), which was not significantly different from chance (V = 2479, p = .0473, r = −.32). Decisions
were more strongly influenced by Joint-cost minimizing concerns than by Fairness (Figure 3).
Parameter Estimations
The posterior modes and 95% highest density intervals (HDI) for the population-level param-
eters that represent how participants weighted the cost disparities to make object choices are
presented in Table 1 for all of the models fitted. Experiment-level parameter estimates are
summarized in the Supplemental Materials (section S2, Table S2.1).
Turning first to the main hypothesis on the relative weighting of the Self and Other
Disparities, a model including both disparities was a better fit for the data than models including
either disparity alone. In this two-predictor model, both population-level means (μβSelf and
μβOther) of the coefficients for the disparities were distributed below zero (Figure 4c, Self:
95% HDI: [−0.469, −0.273], Mode μβSelf = −0.367; Other: 95% HDI: [−0.390, −0.193],
Mode μβOther = −0.291). This suggests that both parameters made non-null contributions in
the predicted directions. Increasing Self and Other disparities by a centimeter led to a 30.7%
and 25.2% decrease in the odds of picking A1 over B1, respectively.
2 In 66% of the trials, the predictions of Self- and Joint-cost minimization overlapped, therefore we used that as
chance level.
3 For three comparisons to chance, α-levels were Bonferroni-corrected for repeated testing (α = .017). As a
measure of effect size, we report rank-biserial correlations (Kerby, 2014).
OPEN MIND: Discoveries in Cognitive Science
105
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
/
/
.
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
a
_
0
0
0
4
5
p
d
.
/
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Computing Joint Action Costs
Török et al.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
Figure 2. Results of the experiments against the predictions of the main cost-minimization strategies. (a) Observed object A1 choices, and (b)
the posterior predictions of the best-fitting model using the linear combination of Self and Other Disparities. (c) Individual decision boundaries
according to the best-fitting model. The red line indicates the population-level boundary. (d–f ) Predictions for optimal responses according to
Self-, Other-, and Joint-cost (i.e., Self + Other costs) minimizing strategies, respectively. The lower the disparity to be minimized according to a
model, the higher the probability of picking object A1 (blue). Predictions were calculated assuming that one pixel increase in a given parameter
would result in 1% decrease in the odds of choosing A1 over B1. All plots feature disparities in pixels.
i
/
/
.
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
a
_
0
0
0
4
5
p
d
.
/
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Figure 3. Observed object choices against the predictions of an Unfairness-Minimizing strategy.
(a) Observed object A1 choices as a function of Fairness and the linear combination of Self and
Other Disparity. (b) Predictions for optimal responses according to a strategy that minimizes the
unfairness of task distribution between co-actors. The lower the degree of asymmetry in costs (or
the magnitude of joint disparities) the higher the probability of picking object A1. The predictions
were calculated assuming that one pixel increase in unfairness would result in 1% decrease in the
odds of choosing A1 over B1. Both plots feature disparities in pixels.
OPEN MIND: Discoveries in Cognitive Science
106
Computing Joint Action Costs
Török et al.
Table 1.
criterion, AUC—area under the curve).
Parameter estimates from all fitted models, with measures of predictive accuracy and model fit (LOOIC—leave-one-out information
Object choice (A1) predictors
(1) Self Disparity
(2) Other Disparity
(3) Self Disparity and
Other Disparity
(4) Fairness
μβSelf
Mode of posterior [95% HDI]
μβOther
μβFairness
−0.156
[−0.313, −0.005]
−0.058
[−0.210, 0.092]
−0.367
[−0.469, −0.273]
−0.291
[−0.390, −0.193]
(5) Self Disparity, Other Disparity,
and Fairness
−0.376
[−0.475, −0.256]
−0.282
[−0.397, −0.185]
1. (3.2) Self Disparity and Other
Disparity (unambiguous trials)
−0.348
[−0.440, −0.246]
−0.267
[−0.378, −0.146]
2. (3.3) Self Disparity and Other
Disparity (Block 1)
−0.298
[−0.414, −0.193]
−0.110
[−0.216, −4.08e−05]
3. (4.2) Fairness (unambiguous trials)
LOOIC [SE]
13109.1 [97.3]
AUC
0.735
14529.2 [82.0]
0.628
9437.8 [124.6] 0.859
16153.9 [42.2]
0.542
9407.8 [124.5] 0.851
5414.6 [93.5]
0.855
610.6 [27.2]
0.825
−0.003
[−0.089, 0.092]
−0.031
[−0.120, 0.083]
0.172
[0.038, 0.318]
7850.9 [75.0]
0.748
Note. Coefficients were rescaled to express the effect of the cost disparities in units of one on-screen cm. Pixel-based estimates for all param-
eters are reported in Table S2.1.
The 95% HDI of the posterior of the difference between the disparities’ coefficients included
zero (Modediff ( μβSelf
− μβOther ) = −0.072, 95% HDI = [−0.214, 0.052]). In a given trial, the like-
liest expected decrease in the odds of an A1 over a B1 choice was 7% larger due to a one-
centimeter increase in Self Disparity than due to a one-centimeter increase in Other
Disparity. In other words, the likeliest estimated overall effect of Self Disparity on the probability
of a square object choice was 7% larger than the effect of Other Disparity. The possible odds
changes, however, ranged from a 19.2% larger relative decrease of the odds based on Self
Disparity to a 5.4% larger relative decrease based on Other Disparity. These results suggest that
the difference between the magnitudes of the two disparities’ effects on decision making was
credibly small across the experiments. The average relative weights on Self and Other Disparity
were .56 (95% HDI = [.42, .71]) and .44 (95% HDI = [.29, .59]), respectively (for participant-
wise estimates, see Figure S3). This pattern of weights was not due to selfish and altruistic peo-
ple’s results averaging out: 92 participants’ HDIs overlapped.
Second, Fairness on its own was not a meaningful predictor. When included in the model
using Self and Other Disparities as predictors, the conditional influence of Fairness was still
credibly null (μβFairness HDI included zero). However, Fairness improved the model’s predic-
tive accuracy according to the LOOIC—although not the model’s fit to the observed data
(Table 1). To clarify whether this predictive accuracy improvement was because Fairness cap-
tured meaningful interindividual differences in our sample rather than collinearity between
parameters, we analyzed only those trials in which Fairness and Joint-cost minimization pre-
dicted different decisions (6,682 “unambiguous” trials).
OPEN MIND: Discoveries in Cognitive Science
107
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
.
/
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
a
_
0
0
0
4
5
p
d
/
.
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Computing Joint Action Costs
Török et al.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
.
/
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
a
_
0
0
0
4
5
p
d
.
/
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
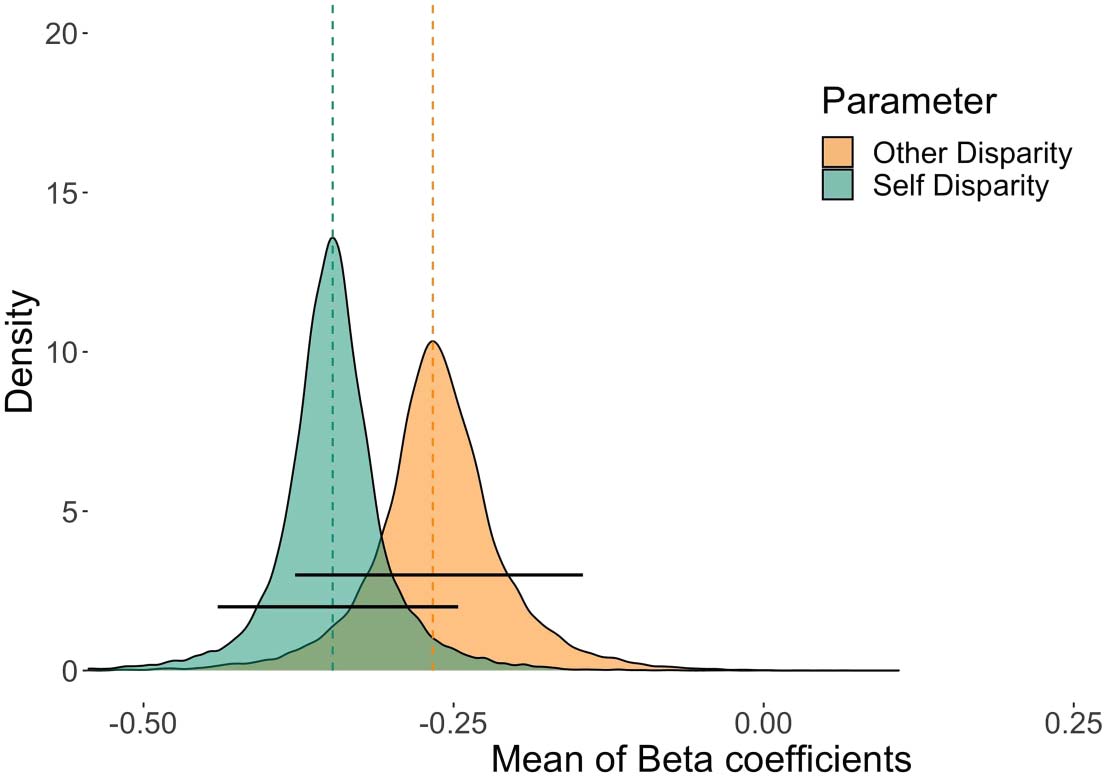
Figure 4. Parameter estimates for the Self-, Other-, and Joint-cost minimization models. (a)–(c)
Posterior probability distributions of the rescaled μβ parameters for Self and Other Disparities in
Models 1 to 3 (see Table 1), respectively. The dashed vertical lines indicate the modes of μβ, the
black horizontal lines represent the 95% HDIs (highest density intervals).
People made co-efficient choices in 76.6% (SD = 10.4) of these trials, almost exactly the same
proportion as in the full sample. We reestimated the Self and Other Disparity and Fairness only
models on this data set and found that the former predicted the participants’ behavior better
(Table 1, Models 3.2 and 4.2). The estimates support the hypothesis that people made decisions
that aimed to minimize both Self and Other costs (Figure 5; see Figure S4 for individual esti-
mates). Overall, we found no clear effect of Fairness on decision making, and conclude that
the Self and Other Disparities model provides the most accurate description of our findings.
Learning and Tit-for-Tat Strategy
Were participants’ decision-making strategies stable over time? Did a partner’s previous co-
efficient choices drive behavior as a tit-for-tat strategy? We addressed these questions by running
additional models, extended with the factors Trial and Block (of five trials), and a variable coding
whether the co-actor chose co-efficiently on their previous trial (PrevCoeff ). We found that
neither predictor improved the best model’s predictive accuracy or fit to the data (Table S6.1).
OPEN MIND: Discoveries in Cognitive Science
108
Computing Joint Action Costs
Török et al.
Figure 5. Posterior probability distributions of the rescaled μβ parameters in the Self + Other
Disparity model estimated on the nonambiguous trials (Table 1, Model 3.2). The dashed vertical
lines indicate the modes μβ, the black horizontal lines represent the 95% HDIs (highest density
intervals).
Additionally, we reestimated all models on each participant’s first five decisions (Block 1)
and found that in the first minute of a game, decisions were best described by the Self and
Other Disparity model, although with a higher relative weight on Self costs (Self: .73, 95%
HDI = [.47, 1.00], Other: .27, 95% HDI = [0, .53]; Table S6.1, Figure S5). These results together
suggest that participants adopted a stable Joint-cost minimizing strategy following a brief phase
of relative Self-cost minimization (Figure 6).
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
/
/
.
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
a
_
0
0
0
4
5
p
d
/
.
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Figure 6. Mean proportions of Joint-, Self-, and Other-cost minimizing object choices in five-trial
blocks. Each choice could be categorized in either or all of these categories due to overlaps between
the predictions of each strategy in a trial. Error bars represent SE, the dashed horizontal line shows
chance level.
OPEN MIND: Discoveries in Cognitive Science
109
Computing Joint Action Costs
Török et al.
Benefits of Co-efficient Decisions
To investigate whether co-efficient choices conferred any benefit to the dyad, we averaged the
total trial durations for each dyad. When making co-efficient choices, dyads completed trials
on average in MMeans = 4.55 s (SDMeans = 0.63 s), with an average standard deviation of MSD =
0.98 s (SDSD = 0.68 s). Trials with sub-efficient object choices numerically lasted longer for 55
out of 60 dyads, on average for MMeans = 4.78 s (SDMeans = 0.65 s), with a lower average
standard deviation than in the case of co-efficient choices (MSD = 0.83 s; SDSD = 0.25 s).
These results suggest a beneficial effect of co-efficient choices on task completion time.
Statistical testing was not conducted due to the low number of sub-efficient choices.
DISCUSSION
The current study explored the computations that underlie joint-cost minimizing decisions in
planning joint actions. We tested the hypothesis that co-actors represent the collaborating
dyad’s joint costs as a sum of the members’ individual costs and seek to minimize this value.
Participants made binary decisions between action plans with different associated move-
ment costs in a joint object matching task. We modeled the parametric dependence of partic-
ipants’ choices on the action cost disparities for the acting participant and those for her partner
using mixed-effects logistic regression models estimated in the Bayesian framework. The cost
disparities of the actor and co-actor were found to be similarly weighted, which suggests that
the decision maker aimed to minimize the joint action cost (77% of choices were co-efficient).
We also tested an alternative hypothesis, according to which the minimization of unfairness
in the distribution of individual action costs determines action decisions. Overall, we conclude
that fairness did not influence action choices. Furthermore, we did not find conclusive evidence
for participants following a tit-for-tat strategy along the lines of “If you choose co-efficiently, I
will do so, too.” The results suggest that after briefly overweighting Self costs in the first few
trials, the participants followed a Joint-cost minimizing strategy throughout the task.
Therefore, our experiments’ results provide support for co-efficiency maximization as a pri-
mary strategy of action planning in a joint task involving two contributions. This is consistent
with the way Kleiman-Weiner and colleagues (2016) operationalized cooperative planning in
their computational model, and confirms that, as long as the individual costs can be estimated
on the same scale (i.e., as proportional to distance in our case), joint costs are calculated as
the weighted sum of individual costs in joint action planning. Our findings suggest weights of
~.56 on the decision maker’s own, and ~.44 on her partner’s individual costs. The behavior
we found is also qualitatively consistent with previous findings from a joint action task
(Török et al., 2019) and economic games (Colman et al., 2008). Based on results from the
co-representation literature (e.g., Schmitz et al., 2017), we speculate that in simultaneous
tasks, too, people might account for joint costs.
It is possible that participants made choices based on hypothetical costs. However, we do
not consider this a problem for our account. We argue that if participants had treated this as an
abstract problem with more and less appropriate choices in a hypothetical mode (akin to a
distance judgment task without movement), the fact that participants minimized movement
distances for themselves and their partners suggests that the manipulation of even imaginary
action costs influenced decision making. This would strengthen our account, not weaken it.
Investigating the factors that might modulate how actors’ individual action costs are
weighed in decision making awaits future research. Relevant factors might include the explicit
role distribution of co-actors, social hierarchies (Kleiman-Weiner et al., 2016), the relative
OPEN MIND: Discoveries in Cognitive Science
110
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
.
/
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
a
_
0
0
0
4
5
p
d
/
.
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Computing Joint Action Costs
Török et al.
competence of the co-actors at specific motor tasks, and uncertainty about the co-actors’ cost
functions. Increasing the uncertainty about the partner’s action costs might make people
downplay the importance of a co-actor’s individual costs in the computation of joint costs,
or to ignore them altogether. Furthermore, more extreme costs or larger asymmetries between
individuals might have similar effects on decision making: the former could push people toward
self-interest (and so could social hierarchy), the latter could inspire a fairness-focused strategy
instead. The effects of these factors should be explored to achieve a fuller understanding of
the computations that people employ in cooperative action planning. As a first step toward this
goal, the present study provides clear evidence for an additive cost computation that enables
efficient coordination for a dyad in a sequential cooperative activity.
ACKNOWLEDGMENTS
We thank Dávid Csu}rös, Vanda Derzsi, and Fruzsina Kollányi for their assistance in data
collection.
FUNDING INFORMATION
NS, FP7 Ideas: European Research Council (https://dx.doi.org/10.13039/100011199), Award
ID: 616072. GC, H2020 European Research Council (https://dx.doi.org/10.13039
/100010663), Award ID: 742231.
ROLE INFORMATION
GT: Conceptualization: Equal; Data curation: Equal; Methodology: Equal; Software: Equal;
Writing – original draft: Lead; Writing – review & editing: Equal. OS: Conceptualization: Equal;
Data curation: Equal; Methodology: Equal; Software: Equal; Writing – original draft: Equal; Writing
– review & editing: Equal. NS: Conceptualization: Equal; Funding acquisition: Lead;
Methodology: Equal; Supervision: Lead; Writing – original draft: Equal; Writing – review & editing:
Equal. GC: Conceptualization: Equal; Funding acquisition: Lead; Methodology: Equal; Software:
Equal; Supervision: Lead; Writing – original draft: Equal; Writing – review & editing: Equal.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
/
.
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
a
_
0
0
0
4
5
p
d
/
.
i
REFERENCES
Axelrod, R., & Hamilton, W. D. (1981). The evolution of coopera-
tion. Science, 211(4489), 1390–1396. https://doi.org/10.1126
/science.7466396, PubMed: 7466396
Brainard, D. H. (1997). The Psychophysics Toolbox. Spatial Vision,
10(4), 433–436. https://doi.org/10.1163/156856897X00357,
PubMed: 9176952
Bratman, M. E. (1992). Shared cooperative activity. The Philosophical
Review, 101(2), 327–341. https://doi.org/10.2307/2185537
Butterfill, S. (2017). Joint action: A minimal account. In J. Kiverstein
(Ed.), Routledge Handbook of Philosophy of the Social Mind
(pp. 357–369). Routledge.
Chennells, M., & Michael, J. (2018). Effort and performance in a
cooperative activity are boosted by perception of a partner’s effort.
Scientific Reports, 8. https://doi.org/10.1038/s41598-018-34096-1,
PubMed: 30356160
Colman, A. M., Pulford, B. D., & Rose, J. (2008). Collective ratio-
nality in interactive decisions: Evidence for team reasoning. Acta
Psychologica, 128(2), 387–397. https://doi.org/10.1016/j.actpsy
.2007.08.003, PubMed: 17868630
Dawes, C. T., Fowler, J. H., Johnson, T., McElreath, R., & Smirnov,
O. (2007). Egalitarian motives in humans. Nature, 446(7137),
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
794–796. https://doi.org/10.1038/nature05651, PubMed:
17429399
Denwood, M. J. (2016). runjags: An R package providing interface
utilities, model templates, parallel computing methods and
additional distributions for MCMC models in JAGS. Journal of
Statistical Software, 71(9), 1–25. https://doi.org/10.18637/jss
.v071.i09
Fawcett, T. (2006). An introduction to ROC analysis. Pattern Recognition
Letters, 27(8), 861–874. https://doi.org/10.1016/j.patrec.2005.10.010
Fehr, E., & Schmidt, K. M. (1999). A theory of fairness, competition,
and cooperation. The Quarterly Journal of Economics, 114(3),
817–868. https://doi.org/10.1162/003355399556151
Gelman, A., Hwang, J., & Vehtari, A. (2014). Understanding pre-
dictive information criteria for Bayesian models. Statistics and
Computing, 24(6), 997–1016. https://doi.org/10.1007/s11222
-013-9416-2
Kerby, D. S. (2014). The simple difference formula: An approach to
teaching nonparametric correlation. Comprehensive Psychology,
3, 11–IT. https://doi.org/10.2466/11.IT.3.1
Kleiman-Weiner, M., Ho, M. K., Austerweil, J. L., Littman, M. L., &
Tenenbaum, J. B. (2016). Coordinate to cooperate or compete:
OPEN MIND: Discoveries in Cognitive Science
111
Computing Joint Action Costs
Török et al.
Abstract goals and joint intentions in social interaction. In A.
Papafragou, D. Grodner, D. Mirman, & J. C. Trueswell (Eds.),
Proceedings of the 38th Annual Meeting of the Cognitive Science
Society, Recognizing and Representing Events, CogSci 2016,
Philadelphia, PA, August 10–13. Cognitive Science Society.
Kleiner, M., Brainard, D., Pelli, D., Ingling, A., Murray, R., &
(2007). What’s new in Psychtoolbox-3.
Broussard, C.
Perception, 36(14), 1–16. https://doi.org/10.1068/v070821
Körding, K. P., & Wolpert, D. M. (2006). Bayesian decision theory in
sensorimotor control. Trends in Cognitive Sciences, 10(7), 319–326.
https://doi.org/10.1038/nature02169, PubMed: 14724638
Kruschke, J. (2015). Doing Bayesian data analysis: A tutorial with R,
JAGS, and Stan (2nd ed.). Academic Press. https://doi.org/10
.1016/B978-0-12-405888-0.00008-8
Pelli, D. G. (1997). The VideoToolbox software for visual psycho-
physics: Transforming numbers into movies. Spatial Vision, 10(4),
437–442. https://doi.org/10.1163/156856897X00366, PubMed:
9176953
Plummer, M. (2003, March). JAGS: A program for analysis of
Bayesian graphical models using Gibbs sampling. In Proceedings
of the 3rd International Workshop on Distributed Statistical
Computing, 124(125), 10. https://doi.org/10.1.1.13.3406
Rand, D. G., Tarnita, C. E., Ohtsuki, H., & Nowak, M. A. (2013).
Evolution of fairness in the one-shot anonymous Ultimatum
Game. Proceedings of the National Academy of Sciences, 110(7),
2581–2586. https://doi.org/10.1073/pnas.1214167110, PubMed:
23341593
Ray, M., de Grosbois, J., & Welsh, T. N. (2017). Index of difficulty and
side of space are accommodated during the selection and planning
of a joint action. Human Movement Science, 54, 197–209. https://
doi.org/10.1016/j.humov.2017.05.009, PubMed: 28527422
Ray, M., & Welsh, T. N. (2011). Response selection during a joint
action task. Journal of Motor Behavior, 43(4), 329–332. https://
doi.org/10.1080/00222895.2011.592871, PubMed: 21774608
Santamaria, J. P., & Rosenbaum, D. A. (2011). Etiquette and effort
holding doors for others. Psychological Science, 22(5), 584–588.
https://doi.org/10.1177/0956797611406444, PubMed:
21515739
Schmitz, L., Vesper, C., Sebanz, N., & Knoblich, G. (2017). Co-
representation of others’ task constraints in joint action. Journal of
Experimental Psychology: Human Perception and Performance,
43(8), 1480–1493. https://doi.org/10.1037/xhp0000403,
PubMed: 28368165
Sebanz, N., Bekkering, H., & Knoblich, G. (2006). Joint action:
Bodies and minds moving together. Trends in Cognitive
Sciences, 10(2), 70–76. https://doi.org/10.1016/j.tics.2005.12
.009, PubMed: 16406326
Strachan, J. W., & Török, G. (2020). Efficiency is prioritised over
fairness when distributing joint actions. Acta Psychologica,
210, Article 103158. https://doi.org/10.1016/j.actpsy.2020
.103158, PubMed: 32768609
Sugden, R. (2003). The logic of team reasoning. Philosophical
E x p l o r at i o n s , 6 ( 3 ) , 1 6 5 – 1 8 1 . h t t p s : / / d o i . o r g / 1 0 . 1 0 8 0
/10002003098538748
Török, G., Pomiechowska, B., Csibra, G., & Sebanz, N. (2019).
Rationality in joint action: Maximizing coefficiency in coordina-
tion. Psychological Science, 30(6), 930–941. https://doi.org/10
.1177/0956797619842550, PubMed: 31088200
Trivers, R. L. (1971). The evolution of reciprocal altruism. The
Quarterly Review of Biology, 46(1), 35–57. https://doi.org/10
.1086/406755
Vehtari, A., Gabry, J., Magnusson, M., Yao, Y., Bürkner, P.,
Paananen, T., & Gelman, A. (2020). loo: Efficient leave-one-out
cross-validation and WAIC for Bayesian models. R package ver-
sion 2.4.1. Stan. https://mc-stan.org/loo/
Vehtari, A., Gelman, A., & Gabry, J. (2017). Practical Bayesian
model evaluation using leave-one-out cross-validation and
WAIC. Statistics and Computing, 27(5), 1413–1432. https://doi
.org/10.1007/s11222-016-9696-4
Wolpert, D. M., & Landy, M. S. (2012). Motor control is decision-
making. Current Opinion in Neurobiology, 22(6), 996–1003.
https://doi.org/10.1016/j.conb.2012.05.003, PubMed: 22647641
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
o
p
m
i
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
i
/
.
/
1
0
1
1
6
2
o
p
m
_
a
_
0
0
0
4
5
1
9
6
3
6
0
6
o
p
m
_
a
_
0
0
0
4
5
p
d
/
.
i
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
OPEN MIND: Discoveries in Cognitive Science
112