David Johnson, Daniela Damian,
and George Tzanetakis
Department of Computer Science
University of Victoria
3800 Finnerty Road
Engineering and Computer Science
Building, Room 504
Victoria, BC V8P 5C2 Canada
davidjo@uvic.ca, danielad@uvic.ca,
gtzan@ieee.org
Detecting Hand Posture
in Piano Playing Using
Depth Data
Abstrait: We present research for automatic assessment of pianist hand posture that is intended to help beginning piano
students improve their piano-playing technique during practice sessions. To automatically assess a student’s hand
posture, we propose a system that is able to recognize three categories of postures from a single depth map containing a
pianist’s hands during performance. This is achieved through a computer vision pipeline that uses machine learning on
the depth maps for both hand segmentation and detection of hand posture. D'abord, we segment the left and right hands
from the scene captured in the depth map using per-pixel classification. To train the hand-segmentation models, nous
experiment with two feature descriptors, depth image features and depth context features, that describe the context of
individual pixels’ neighborhoods. After the hands have been segmented from the depth map, a posture-detection model
classifies each hand as one of three possible posture categories: correct posture, low wrists, or flat hands. Two methods
are tested for extracting descriptors from the segmented hands, histograms of oriented gradients and histograms of
normal vectors. To account for variation in hand size and practice space, detection models are individually built for
each student using support vector machines with the extracted descriptors. We validate this approach using a data set
that was collected by recording four beginning piano students while performing standard practice exercises. The results
presented in this article show the effectiveness of this approach, with depth context features and histograms of normal
vectors performing the best.
Assessment of Piano Technique
Learning to play a musical instrument is a challeng-
ing task that requires years of disciplined practice to
master. Typiquement, aspiring musicians rely on weekly
lessons with a professional teacher to supervise and
provide feedback on their learning progress. To im-
prove their playing abilities, students must augment
weekly lessons with daily practice in which they are
expected to gradually be able to self-analyze their
performance. Students must then wait for their next
lesson to receive expert feedback on their practice
and technique. Some teaching methods, such as the
Suzuki method, expect involvement from student’s
parents to actively supervise and provide feedback
during the daily practice of their child. This is often
challenging or infeasible for busy parents, and such
an approach cannot be easily transposed for adult
students. The ubiquity of computers as well as the
emergence of virtual reality and advances in sensor
Computer Music Journal, 43:1, pp. 59–78, Spring 2019
est ce que je:10.1162/COMJ a 00500
c(cid:2) 2019 Massachusetts Institute of Technology.
technology provide new research opportunities to
create innovative tools to assist both students and
teachers with the process of learning a musical
instrument.
Research in computer-assisted music-instrument
tutoring (CAMIT) systems attempts to enhance mu-
sic pedagogy by providing the tools necessary to au-
tomatically assess student performance and provide
personalized feedback (Percival, Wang, and Tzane-
takis 2007). Many CAMIT systems rely on sound
analysis and are said to be “listening” to students’
performances during practice. Ainsi, the feedback
students receive accounts for the musical quality
of their performance, omitting evaluation and feed-
back of their physical playing technique. CAMIT
researchers have also recognized the importance of
assessing physical technique to improve musical
performance. Projects such as i-Maestro (Ng, Nesi,
and Marta 2008) and Technology Enhanced Learn-
ing of Music Instruments (http://telmi.upf.edu) have
implemented methods for the automatic assessment
of technique in stringed instrument practice. Le
major contribution of our work is a system for the
automatic assessment of piano playing technique by
Johnson et al.
59
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
“watching” a student’s hands, rather than relying
on acoustic analysis, to provide feedback on their
hand posture. The system is intended to be used
to generate feedback for a tutoring interface that
would augment weekly piano lessons. Such an
interface would enhance the piano-learning process
by providing students with immediate feedback on
their performance during practice. En outre,
automated feedback would allow teachers to track
students’ progress during practice sessions in which
the teacher is not present.
This work builds on our previous research on
hand-posture detection, in which we implemented a
prototype detection system, trained and tested with
two experienced adult piano players (Johnson et al.
2016). Because the participants were experienced
and generally played with correct posture, le
data used had to be artificially created by asking
the participants to play a set of exercises with
both correct and deliberately incorrect postures.
Although this initial work showed the potential
for hand-posture detection, it was not tried out
with piano players for whom the different hand
postures occurred naturally. The work presented
in this article extends the research in two ways:
(1) by analyzing empirical data from a real-world
data set captured by video-recording real piano
students and (2) provides a revised, more robust
hand-segmentation method and a new posture-
detection training scheme that we developed to
analyze the smaller hands of the piano students in
the new data set. Results of experiments on the
new approaches show that they are more robust and
work with piano students of varying ages.
Pianist Hand Posture
Body and hand posture are fundamental to proper
technique in piano playing. Riley, Coons, and Mar-
carian (2005) discuss the importance of performance
feedback in the acquisition of musical skill, surtout-
cially in the case of repetitive practice in which
consistent bad technique may lead, in extreme
cases, to injuries. In their work, multimodal feed-
back of pianist technique was generated through
analysis of MIDI data, video recordings, and surface
electromyography. The latter was added to augment
video analysis after the authors found that, même
for experienced pianists, reviewing videos frame by
frame did not help identify problems. Augmenting
the system with surface electromyography improved
the results, but the authors noted that analysis re-
quired time and patience from both the student and
the instructor.
In contrast, our system is intended to generate
data for immediate performance feedback without
complex analysis.
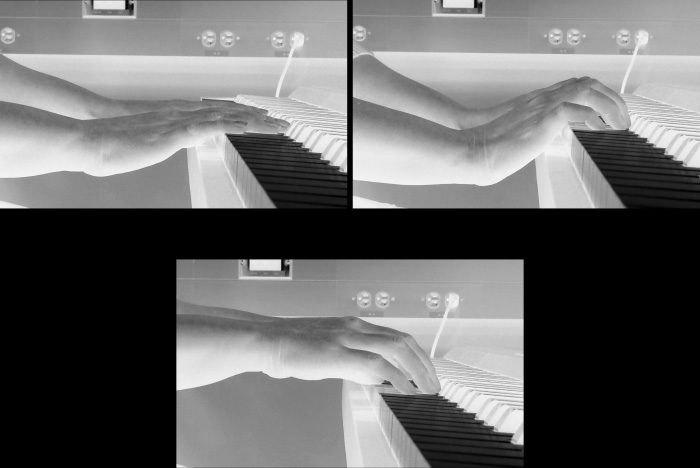
For correct hand posture, the hand should be
arched and the fingers curled as illustrated in Fig-
ure 1c. Working with a piano teacher, we identified
two common posture mistakes observed in students:
playing with flat hands (Figure 1a), and playing with
low wrists (Figure 1b). Because most of a student’s
practice time occurs between lessons, bad habits
can quickly become chronic. Providing students
with a tool that can identify and help correct
these mistakes during daily practice would reduce
the probability that they become ingrained in the
student’s technique.
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Related Work
To improve musical abilities, students must learn
to self-evaluate their performance to identify and
correct errors during practice sessions. With teacher-
based training, students rely on their teachers to
point out errors and provide them with instruction
to address the errors. Students, cependant, have
limited practice time with teachers and may have
difficulty remembering everything learned during a
teacher-led session. To improve the learning process,
CAMIT systems attempt to help students evaluate
their performance using computational techniques
for automatic assessment when a teacher is not
présent. En général, errors can be categorized into
musical mistakes, such as missed notes or poor
sound quality, and technique mistakes, tel que
poor posture. There has been research into CAMIT
systems for both categories.
60
Computer Music Journal
Chiffre 1. The three
common hand postures of
beginning piano students
that are detected with the
presented system: flat
hands (un) and low hands
(b) are common postures
mistakes made by
students, as opposed to the
hand in the ideal posture
for pianists (c).
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Musical Evaluation
Evaluation of the musical component of a perfor-
mance is usually done by listening to the perfor-
mance to identify musical errors e.g., incorrect
notes or poor sound quality). To assess musical per-
formance, CAMIT systems often use audio signal
traitement (ASP).
One of the first CAMIT research projects to use
ASP was the Piano Tutor project (Dannenberg et al.
1993), an intelligent multimedia system to teach
beginners to play the piano. The Piano Tutor was a
complete tutorial system intended to supplement
traditional music pedagogy by a professional teacher.
Using ASP, the Piano Tutor implemented score
following to assess how a student was performing
by listening to the student’s performance and
comparing it with a score (Dannenberg et al. 1990).
In the project IMUTUS (Interactive Music Tuition
System, cf. Raptis et al. 2005) a music tutoring
system was developed for teaching the recorder to
beginning students. Like the Piano Tutor, IMUTUS
listened to student performances using ASP for
audio recognition to assess the musical output.
Audio recognition was paired with score matching
to detect errors in the performance. By listening to a
performance, IMUTUS was able to detect melodic,
timing, and articulation errors (Schoonderwaldt,
Askenfelt, and Hansen 2005).
The Interactive Digital Violin Tutor (iDVT, cf.
Lu et al. 2008) was a system for violin tutoring that
transcribed a student’s performance through onset
detection and pitch estimation. To improve the
quality of onset detection, ASP was fused with video
data. A student could then compare the transcribed
performance to a reference score.
Research performed with the TELMI project
also used ASP to analyze violin performance but,
rather than focus on pitch and onset errors, le
authors used audio data to assess tone quality
using machine learning (Giraldo et al. 2019). Le
system implements methods to build user-defined
tone quality models to overcome the subjectivity
in timbre perception that makes generalization
a challenge. Audio signal processing plays an
important role in the automatic assessment of
musical performances, but it can only assess the
musical quality of the performance. Other methods
are needed to assess performer technique, tel que
pianist hand posture.
Johnson et al.
61
Evaluation of Technique
Automatic assessment of technique requires meth-
ods for capturing body position and movements
during practice. Researchers in CAMIT have used
optical systems, such as motion-capture systems
and camera technologies, to capture the needed
performance data.
For piano pedagogy, Mora and colleagues (2006)
used a motion-capture system to track the move-
ments and body posture of a pianist. The system
used eight infrared cameras and an average of 79
positional markers to record positional data to con-
struct a 3-D skeleton model that could be overlaid
on a video recording of the practice session.
The i-Maestro project (Ng et al. 2007) used a
motion-capture system to capture and analyze
performance on stringed instruments for the three-
dimensional (3-D) augmented mirror application.
Twelve infrared cameras and markers attached to the
performer, the bow, and the instrument were used
in the augmented mirror to capture performer and
instrument positional data. The data were used to
provide assessment and feedback on the performer’s
bowing technique and posture.
Motion-capture systems, cependant, are compli-
cated and expensive, limiting their use outside of
laboratory settings. Ainsi, more accessible methods,
such as computer vision or signal processing with
low-cost sensors, are needed to capture motion for
technique assessment.
Dalmazzo and Ramirez (2019) used the Myo
armband, which tracks muscle movement in the
forearm using electromyography, for the classifi-
cation of violin bowing gestures. The Myo data
were combined with audio data for real-time gesture
recognition using a hierarchical hidden Markov
model.
Salgian and Vickerman (2016) proposed a com-
puter vision–based CAMIT system for conducting
students that used the Microsoft Kinect to track
students’ physical performance. Using Kinect data,
the system was able to detect common conducting
errors, calculate tempo, and perform articulation
reconnaissance.
These works show that assessment of playing
technique is an important component of music
pedagogy and can be integrated in CAMIT systems
using technologies such as motion capture, com-
puter vision, and ASP. Capturing pianists’ hands
for assessment of piano technique using these
technologies presents its own challenges.
Pianist Hand Tracking
Identifying and tracking pianists’ hands for per-
formance analysis has been explored in previous
recherche. Tits and coworkers (2015) used a marker-
based motion-capture system to analyze pianists’
hands and finger gestures to determine the per-
former’s level of expertise.
Malheureusement, marker-based approaches are gen-
erally intrusive and not readily available outside the
laboratory environment. As an alternative, mark-
erless approaches for hand tracking use standard
RGB cameras or depth maps from depth cameras,
such as the Kinect. A depth map is an image in
which each pixel represents a distance from the
depth camera to a point on the depicted object’s
surface. Hadjakos, Lefebvre-Albaret, and Toulouse
(2009) presented three methods for hand assignment
using RGB video to detect which hand played a note,
and Oka and Hashimoto (2013) used a combination
of depth recordings from a Kinect and information
from MIDI data to identify a pianist’s fingering
mistakes. Aristotelis Hadjakos (2012) used a depth
camera to capture the motion of key points from
a pianist’s entire body, such as head, shoulders,
wrists, and hands. Enfin, Liang et al. (2016) used a
depth camera and machine learning to detect finger
tapping for playing a virtual piano. These works
presented various methods for capturing pianists’
hands, but none provided the data needed to analyze
hand posture during performance.
There has been some research on systems that
capture the precise details of the hand needed for
hand-posture analysis. MacRitchie and McPherson
(2015) developed a system for automatic fingering
detection that fused data from a high-speed camera
and touch sensors. A camera placed at an aerial
viewpoint tracked painted markers on the pianist’s
hands to capture the x and y coordinates of each
finger. Although the data was only 2-D, the coor-
dinates were used to calculate a curvature index,
62
Computer Music Journal
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
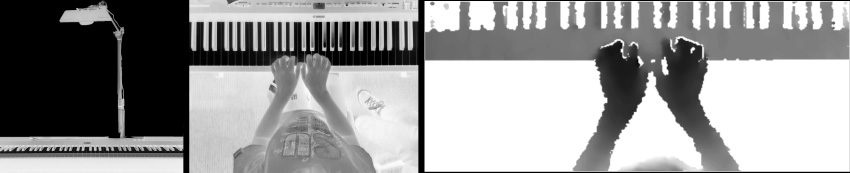
Chiffre 2. The depth camera
is positioned with an
aerial viewpoint to capture
both hands from overhead
(un). (Note that in the final
system we used an Intel
Realsense SR300 in place
of the Kinect displayed
here.) Overhead RGB view
of the camera which is
used for data annotation
(b). Example of a depth
map that is used for model
training and detection (c).
CI. This index was calculated as the ratio between
the distance of two points at a given time with
distance of the same two points in a reference frame.
Although this provides relative information about
the curvature of each finger, there is not enough
information to fully discriminate between various
categories of hand posture. Li et al. (2014) proposed
a system for pianist hand-posture analysis that
detected key regions of the hand using 3-D data. Le
authors used computer vision with depth cameras
to find regions of the hand, such as the hand center,
the middle finger, and the wrist. The key points
were used to derive features for analysis: the ratio
of hand-center height to hand-arch height, et le
horizontal and vertical wrist angles. Using these
features, a histogram analysis was performed for
assessing the range of hand motion during a specific
piano piece. The histograms used for analysis were
generated using data from the entirety of a per-
formed piano piece and were not used for real-time
classification of posture mistakes.
System Description
To enhance the piano pedagogy process, students
need feedback on their physical performance in ad-
dition to feedback about their musical performance.
As previously discussed, there is little work being
done in systems that do more than just listen to
students perform. In this article, we present a novel
approach for watching students practice to detect
hand-posture mistakes using a 3-D camera. Le
use of a this type of camera allows for a nonin-
vasive setup and easy installation in any practice
espace.
The posture-detection system uses a 3-D
structured-light camera, such as a Kinect or In-
tel Realsense SR300, placed above the piano to
capture a piano student’s hands from above. Chiffre
2 shows the camera placement (Figure 2a), the scene
captured by the camera (Figure 2b), and an example
of a depth map as recorded by an SR300 (Figure 2c).
With this configuration, both hands are recorded
with a single camera and the depth data are used
to capture information about the geometry of the
hands, which is used to infer hand posture.
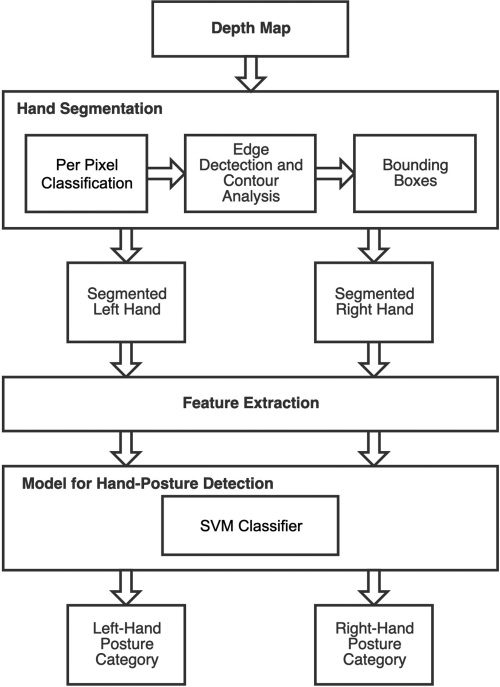
To infer hand posture from a single depth map
we propose the image-processing pipeline shown in
Chiffre 3. The first step in the pipeline is the hand
segmentation, in which the left and right hands
are individually identified in the depth map using
per-pixel classification. The results are two masks,
one for the right hand and one for the left. Edge
detection with contour analysis is performed on
the masks to identify the bounding regions of each
identified hand. This results in two depth maps
containing each hand. Feature descriptors are then
extracted from the segmented hands and used for
training the hand-posture detection model. Once the
model has been trained, the extracted features are
used with the model to predict the posture category
of the segmented hands.
Data Collection
Data were collected using an Intel Realsense SR300
depth camera. The SR300 uses a short-range struc-
tured light system to measure three-dimensional
shape at a resolution of 640×480 pixels. It addition-
ally has a 1080i RGB camera. The camera is capable
Johnson et al.
63
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Chiffre 3. The posture-detection
pipeline used for inferring
hand posture from depth
maps.
generate hand masks for training the segmentation
model and for human annotation of hand posture
used to train the posture-detection models.
Hand Segmentation
With the emergence of new technologies such as
virtual reality, researchers are looking for new means
to interact in more natural ways. This has led to an
emergence of research on detecting body-part and
hand information using camera-based technologies
to allow users to interact with a computer more
naturally without the use of a physical controller.
Par exemple, research into hand-pose recognition
utilizes depth cameras to identify detailed 3-D
information about key features of the hand, tel que
joint locations in a 3-D space. These joint locations
are then used to infer the pose of a hand that can
be mapped to a specific action in the user interface.
The first step in the process for pose recognition is
to segment specific locations of the hand from the
depth map. A similar process is needed for posture
detection. Before being able to predict hand posture,
the pianist’s hands must first be segmented from the
depth map in which the hands are interacting with
a piano.
Body-part segmentation from 3-D data is a
well-researched problem in computer vision. Un
of the original needs was to identify body parts
from depth maps to find specific joint locations
for body-pose recognition (Shotton et al. 2011). À
label 31 parts of the body, per-pixel classification
was performed using a random decision forest
(RDF) trained with custom depth-image features
(DIFs). Similar approaches have been used for hand
segmentation in hand-pose recognition. Keskin et al.
(2013) used the same approach as as Shotton’s team,
including the same DIFs, to identify 21 hand parts
from a depth map. Thompson and colleagues (2014)
used this approach as well, but to segment the entire
hand from the depth map rather than individual
parts of the hand. Liang, Yuan, and Thalmann (2014)
also used per-pixel classification to parse hand parts
from a depth image, but they implemented a new
feature descriptor, depth-context features (DCFs),
for each pixel. The new pixel descriptors improve
of providing synchronized color, depth, and infrared
data at up to 60 frames per second (fps) with depth
range of 0.2 à 1.5 m (Carfagni et al. 2017).
Using a data-driven approach for hand segmen-
tation and posture analysis requires a diverse set
of data to ensure generalization for our models. Comme
this system is being initially designed for beginners,
we recruited piano students between the ages of 9
et 12 years for data collection. Using the SR300,
we recorded the students playing a variety of piano
exercises. The exercises range from basic scales to
technical exercises from the popular piano lesson
book series A Dozen a Day (Burnam 2005). Pour
each recording we captured the depth data and color
data at 30 fps and a resolution of 640 × 480. Le
algorithms described through this work exploit only
the depth information. Color data were used to
64
Computer Music Journal
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
segmentation accuracy compared with the DIFs
used by Shotton’s team. In all of these works, là
is a single hand in the scene and the hand is not
in physical contact with other objects. In contrast,
our work involves a depth-map scene in which
two hands are both in physical contact with a
piano.
There has also been research into segmenting
a hand that is interacting with an object. Liang
and colleagues (2016) extended earlier work (Liang,
Yuan, and Thalmann 2014) with a system for
playing a virtual piano. In that work, fingertips are
tracked while tapping on a flat surface to mimic
piano playing. To segment the hand they use skin
color detection combined with the random sample
consensus algorithm for plane fitting to improve the
accuracy. Then an RDF is applied to the segmented
hand to predict 3-D joint locations. To avoid the
added complication of skin detection as well as the
challenges of using both color and depth data, nous
utilize only depth data for hand segmentation. Kang
and coworkers (2016) have shown that the per-pixel
classification approach can be successfully used to
segment a hand interacting with an object using the
same DIFs as Shotton. The descriptors were used
to train the RDFs using depth maps of participants
interacting with various objects.
In this work, we use per-pixel classification using
an RDF to segment the left and right hands from
the depth-map scene. We experiment training the
RDF with both Shotton’s DIFs and Liang’s DCFs to
find the optimal descriptors. The rest of this section
discusses, in detail, the process and descriptors used
to isolate each hand from a single depth map.
Per-Pixel Classification
The task of per-pixel classification is to predict a
category for every pixel in an image or a depth map.
For each pixel, features are extracted that are used for
training a classification model, such as an RDF. Le
rest of this section presents the process of training
an RDF for per-pixel classification identifying the
left hand, the right hand, and the background from a
depth map. The classification results of training the
RDF with either of two feature descriptors are also
présenté. First we look at DIFs (Shotton et al. 2011)
as used for body part inference, then the more-recent
DCFs (Liang, Yuan, and Thalmann 2014).
Depth-Image Features
Depth-image features are discriminative features
that compare the depth values of pairs of pixels in
a neighborhood to capture a representation of the
surrounding context of a given pixel p. Following
Shotton et al. (2011), for each feature of p, deux
offset parameters, u and v, are randomly selected
and are used to determine the pixel locations of each
offset. The feature is computed as the difference, dans
depth values, at each offset location. Each feature is
computed as
fθ (je, p) = dI
(cid:2)
p + toi
dI ( p)
(cid:3)
(cid:2)
− dI
p +
(cid:3)
,
v
dI ( p)
(1)
where dI ( p) is the depth value of pixel p in image
je. To ensure depth invariance, the offsets are
normalized to the depth of p using 1/dI ( p). A large
constant value is given to any offset pixel that lies
on the background or outside the bounds of the
image.
The offset parameters, u and v, are randomly sam-
pled from a uniform distribution. The range of the
offset sampling affects the size of the neighborhood
to examine; a small sampling range for the offset
values represents a narrow context that is close to
the pixel, whereas a large range increases the area
being captured by the features.
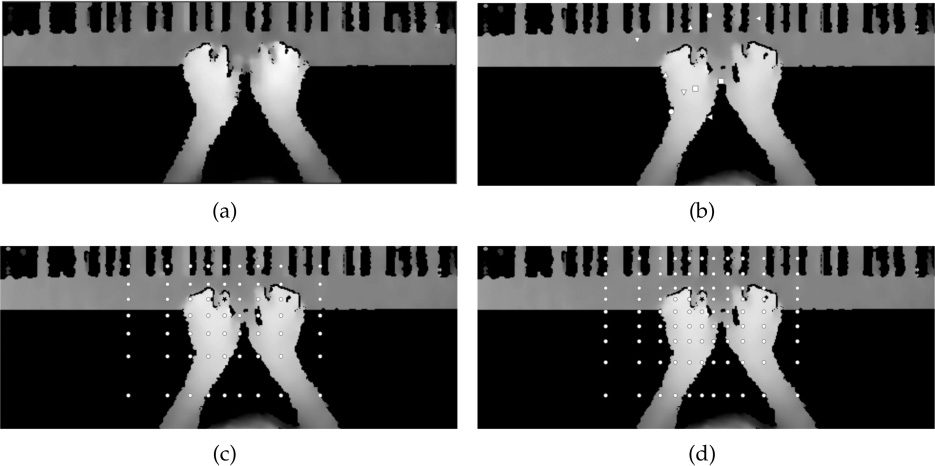
Figure 4b shows an example of a subset of four
randomly sampled pairs of offset locations for a
pixel, marked with a black “x” located on the
left index finger. Each pair of feature offsets is
represented in the figure by a distinct shape. Pour
each offset pair, the difference in depth is calculated
using Equation 1. In practice the number of offset
pairs is much higher; here we use a small value for
the purpose of visualization.
Depth-Context Features
Depth-context features (Liang, Yuan, and Thal-
mann 2014) provide a more-structured approach to
Johnson et al.
65
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Chiffre 4. The original
depth map (un), et
examples of extracting
features of a single pixel in
a depth map used to
classify the pixel as either
hand or background of
offset: a subset of
depth-image feature (DIF)
offsets (b), et
depth-context feature
(DCF) offsets with
parameters M = 4 et
r = .15 (c) and M = 5 et
r = .15 (d).
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
examining the context of a pixel’s neighborhood.
Instead of using randomly generated context points,
Liang and colleagues assert that points nearer to the
classification pixel better describe the context of
the pixel as compared with points that are further
away. Thus Liang’s team propose a distance-adaptive
sampling scheme that samples more densely from
points closer to the classification pixel. The distance
of the context points from the current pixel is de-
fined by maximum range value r , and the parameter
M defines the number of context points to sample.
Figures 4c and 4d show examples of the selected
context pixels using the distance-adaptive approach
with different M values for a pixel on the left index
finger (marked with a black “x”).
Following the method developed by Liang’s team,
depth invariance is handled using offsets of depth-
context points defined in 3-D space rather than
the image plane. The location of the 3-D context
points relative to pixel p with 3-D coordinates
v can be defined as vd = [ad, bd, 0]T. Donc, à
find the pixel coordinates, pc, we must project the
depth context point back to the image plane with
pc = (cid:3) p(v + vd). The feature value for a context
point is thus calculated as the difference between
the depth of the current pixel and the depth of the
context points at the projected pixel coordinate:
fθ (je, p, vd) = dI ( p) − dI [(cid:3) p(v + vd])],
(2)
where dI ( p) is the depth at the given pixel as found
in the depth map.
Classification Using Random Decision Forests
To predict a category for each depth-map pixel, nous
utilize an RDF classifier. An RDF is an ensemble
classifier composed of T decision trees whose
predictions are aggregated using votes weighted
by the posterior probabilities to make the final
prediction. Each decision tree t is composed of split
and leaf nodes. A split node contains a feature and
threshold value used to determine the branching
direction. A leaf node contains a learned probability
distribution Pt(c|je, X) for labels c, where I is the
image and x is the pixel to classify.
To train an RDF, a random subsample (sampled
with replacement) of the training data is selected to
train each tree in the forest. Additional randomness
is applied when finding the split parameters of a
66
Computer Music Journal
node during construction of an individual tree. À
each node, a random subset of features is selected
for consideration when calculating the criteria for
splitting. This approach helps to improve accuracy
and reduce overfitting (Breiman 2001). Training
samples are generated by randomly sampling N
pixels from a depth map for each pixel category and
calculating the corresponding feature values for the
sampled pixels. This is done for each depth map in
the training data to generate a complete training set
for the RDF.
To segment the hands from the depth map, chaque
pixel is assigned a label by evaluating all trees in the
forest and calculating the weighted average using
P.(c|je, X) = 1
T
T(cid:4)
t=1
Pt(c|je, X).
(3)
A label l is then assigned to each pixel x of image I
by l = arg maxc P(c|je, X).
Experiments
To validate the hand segmentation approach pre-
viously discussed and to find the optimal feature
descriptors, we performed a set of experiments
comparing the DCF and DIF descriptors. An RDF
classifier, implemented with scikit-learn (Pedregosa
et autres. 2011) and consisting of ten trees with a maxi-
mum depth of 20, was used in the experiments. Le
rest of this section presents the results of the hand
segmentation approach on a real-world data set.
The data set consists of depth maps from the
recordings of the students. A subset of the recordings
was created by sampling the depth-map recordings
every second. This results in a set of 661 depth maps
for training. For each of the depth maps, a mask was
created to label the pixels as either left hand, droite
main, or background.
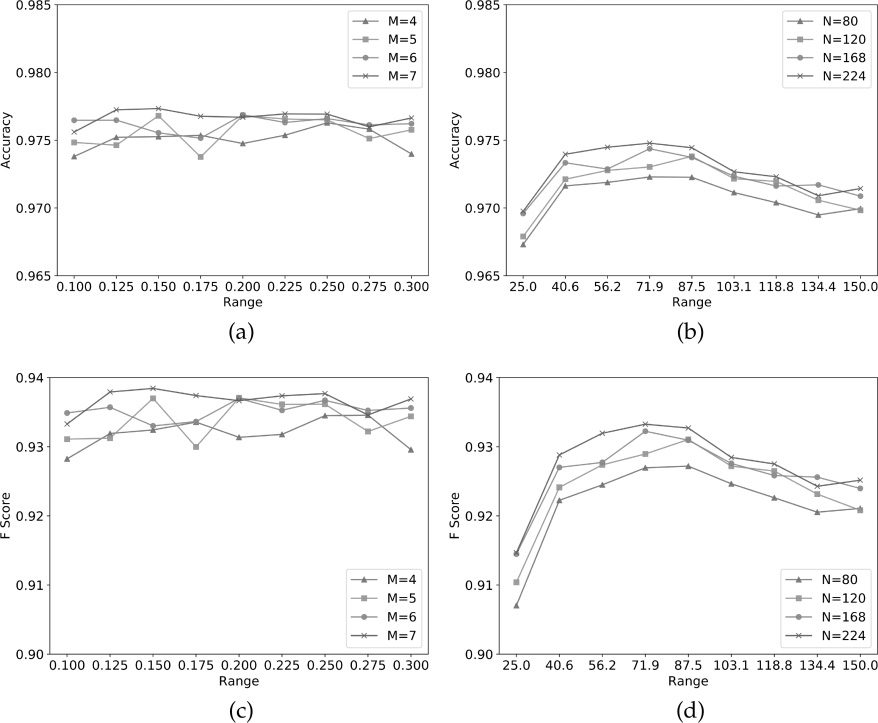
Results
To evaluate our feature sets on the original data
set and find optimal parameters, we tested both the
DIF and the DCF with varying parameters. Both
descriptors have two main parameters to tune. Pour
DCF the parameters are M, which influences the
number of features per pixel, and the range for
offset selection. DIF has similar parameters: N, le
number of features, and the range, indicating the
size of the neighborhood for offset selection. Le
N value for DIF in the experiments corresponds
to the number of features for each M of the DCF
descriptor. To ensure that the segmentation models
are not overfitting to data that has already been
seen, we use a participant-based, leave-one-out cross
validation. In this scheme we train the segmentation
models on all but one participant and use the left-
out participant’s data for testing the model. Le
classification accuracy and F-score of each round
of cross validation are then averaged. Chiffre 5
shows the results for each descriptor and parameter
ensemble.
Dans l'ensemble, the results show that DCF consistently
performs better in terms of both classification
accuracy and F-score. En outre, we see that
generally the more features used in training, le
better the performance of the classifier. For real-time
prediction, cependant, we need to select a parameter
value that balances accuracy against prediction
temps. Prediction time is dependent upon the number
of features to be extracted. For this reason, we find
M = 5 and r = .2 to be the best combination of DCF
parameter values for hand segmentation.
Detecting Hand Posture
With the left and right hands segmented from an
input depth map, the next step in the posture-
detection pipeline is to extract descriptors from the
segmented hand depth maps for use with the posture-
detection models. In our previous work (Johnson
et autres. 2016), two feature descriptors were compared
and found to have similar results. Using an expanded
real-world data set, we experiment with the same
descriptors, histograms of oriented gradients, et
histograms of normal vectors. The features are used
to train and test a posture-detection model based on
support vector machines (SVMs). The rest of this
section discusses the feature extraction-process and
building the posture-detection model.
Johnson et al.
67
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Chiffre 5. Per-pixel
classification results of
hand segmentation using
DCF and DIF with varying
range and neighborhood
sizes: DCF accuracy (un),
DIF accuracy (b), DCF
F-score (c), and DIF
F-score (d).
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Feature Extraction
Two methods for extracting descriptors from the
depth maps are compared, histograms of oriented
gradients (HOGs, cf. Dalal and Triggs 2005) et
histograms of normal vectors (HONVs, see Tang
et autres. 2013). Histograms of oriented gradients are
image descriptors often utilized for object and
human recognition with RGB and grayscale images.
Although influenced by the HOG approach, le
HONV descriptors were specifically designed for
depth data, describing the geometry of the surface of
objets (Tang et al. 2013).
The key idea behind the HOG approach is to
capture local shape through edge strength and
direction. In the RGB space, HOG descriptors are
calculated by approximating the derivative of color
intensity in the x and y directions of an image.
The gradients are converted to polar form in order
to generate orientation angles and corresponding
magnitudes for each pixel in the image. Suivant,
histograms are generated for the image through
sliding nonoverlapping windows (or cells). Pour
each cell, orientation angles are voted into bins
with the votes weighted by the magnitudes, thus
capturing both the direction and strengths of change.
Extraction using HOGs also includes a process for
normalizing gradient strengths over a block of
cells. Dalal and Triggs (2005) explored four different
normalization schemes, called L1-norm, L1-sqrt, L2-
norm, and L2-Hys. They found that all work equally
well except L1-norm, which reduces performance
68
Computer Music Journal
par 5 pour cent. For this work, we use L1-sqrt for
normalization in all experiments.
Although Dalal and Triggs’s work was performed
on RGB images, the HOG approach has also been
shown to work for object and human detection with
depth data (Spinello and Arras 2011; Lai et al. 2011).
And although the data is not in the RGB space,
the HOG approach calculates the orientation and
magnitude of the change in depth values. Ainsi,
when applied to depth maps, these features capture
the shape of an object not only via edge direction
but also by capturing the depth gradients over the
surface of the object. Par exemple, when a pianist
is playing with too low a wrist, the gradients of the
top of the hand will be greater than when playing in
correct form, in which case the top of the hand is
flat.
On the other hand, HONV descriptors were
developed specifically for depth data to provide
a geometric representation of objects (Tang et al.
2013). For HONV descriptors, the x and y gradients
are used to calculate the azimuth and zenith angles
of normal vectors of unit magnitude. The angles
of each pixel in a window are voted into 2-D
histograms. The experiments performed by Tang’s
group showed that HONVs generally perform better
than HOGs in object recognition using depth maps.
Although we do not apply block normalization
to their implementation, we have added L1-sqrt
normalization to explore its effects on posture
detection.
Training
Owing to wide variations in hand shapes, playing
style, and error postures, combined with a limited
number of participants for data collection, nous
decided to use student-specific posture-detection
models for training. To validate this approach,
we used recordings of depth data from four piano
students, each performing the same five beginner
piano exercises. Participant 1 (P1) était 12 ans,
participant 2 (P2) était 11, participant 3 (P3) était
9, and participant 4 (P4) était 11. The exercises for
this study were all in the key of C major and were
mostly monophonic, although there were a few
simple chords in one of the exercises. The length of
each exercise recording varied per student, with an
average length of 26 sec. The left and right hands
of each frame of the recordings were separately
annotated with one of the three posture categories.
Using the annotated data, the hands were segmented
from the depth map using the procedure outlined
au-dessus de. After segmenting both hands, the right hand
was flipped horizontally, giving the image the same
orientation as the left hand, affording the ability
to train a single detection model for each student
(as opposed to individual models for each hand).
For each student model, an SVM was then trained
using the features extracted from both hands. Le
following section discusses the results of training
with each descriptor and the effects of various
parameter values.
Experiments
Both feature descriptors have a number of parameters
to tune for optimal prediction. Dans cette section, nous
present the results of experiments for parameter
tuning to find the best descriptor and parameter
values for posture detection. Due to the high
dimensionality of the data, SVMs are used for
prediction. The rest of this section explores the
effects of employing the two descriptors and their
corresponding parameters for posture detection.
To validate the training, we use threefold cross
validation using 1-second windows of the recordings.
This scheme is meant to reduce the overfitting
effects seen with standard cross validation of
sequential images, in which neighboring frames,
which have minimal variation, are split into the
training and testing data.
Image Size
In general image-processing algorithms, tel que
those for object recognition, the input images are
required to be rescaled to a constant size, tel que
128×128, for a consistent size of feature vectors. Comme
posture detection requires information that is more
fine-grained than does general object recognition,
rescaling could lead to information loss that would
Johnson et al.
69
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
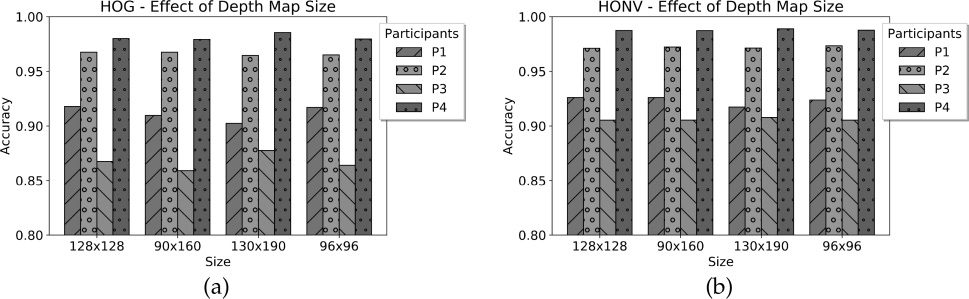
Tableau 1. Average Accuracy of Hand-Posture
Detection
128 × 128
90 × 160
130 × 190
96 × 96
HOG
HONV
93.3%
94.7%
92.9%
94.8%
93.3%
94.6%
93.1%
94.8%
Hand posture detected using histogram of oriented gradients
(HOG) and histogram of oriented normal vectors (HONV)
descriptors.
affect detection performance. Using larger images,
cependant, leads to larger feature vectors that may
affect runtime performance. En outre, reducing
the image to a square changes the aspect ratio of the
extracted hand regions, which was found to have
an average ratio of 9:16. Rescaling to this ratio may
represent the shape of the hand more accurately but
can also lead to information loss. The largest hand
region was found to be 130×190; so to keep all the
hand information available we also experimented
with increasing all images to this size by padding
the front of each image axis with zeros in order to
keep a consistent size without rescaling the image.
For this experiment we used a default cell size of
8×8 and the default block size of 3×3 and an SVM
with a linear kernel.
As shown in Table 1, the various image sizes
appear to have limited effect on prediction accuracy,
with HONVs slightly outperforming HOGs in all
cases. Chiffre 6 shows the prediction results of
the image sizes for each participant, which paints
a slightly different picture. Although the image
sizes have limited effect on accuracy, the HONV
approach improves the accuracy for the hardest case
participant: P3 benefits from an average 4.5 pour cent
increase in accuracy using HONV descriptors. Comme
image size has negligible effects on performance, nous
used a scaled image size of 128×128 for the rest of
the experiments.
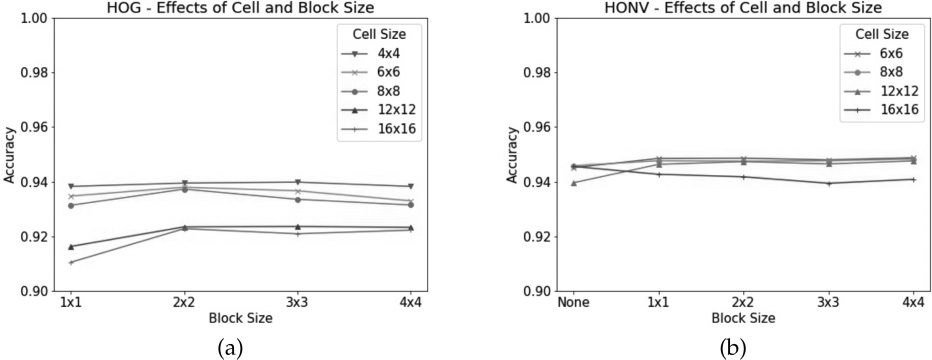
Cell and Block Sizes
Dalal and Triggs (2005) found the optimal cell
size for detecting humans in images with HOG
descriptors to be 6×6 and the optimal block size
to be 3×3. Because posture detection benefits from
an understanding of the full geometric shape of
the hand, not just edge shape, different cell and
block sizes may have different results for posture
detection. Chiffre 7 presents the results of testing
a range of cell and block sizes for each descriptor.
The HONV approach was also tested without block
normalization. In the case of posture detection,
a smaller cell size results in increase prediction
performance. (Due to computational resources we
omit a cell size of 4×4 for the HONV approach.
Because this approach use 2-D histograms, le
resulting feature vectors require significantly more
space than the HOG approach.) Similar to the results
of Dalal and Triggs, block sizes of 2 × 2 et 3 × 3
tend to work best for hand-posture detection using
HOGs. On the other hand, HONVs usually benefit
from normalization, but they are less affected by
block size.
Exercise-Based Training and Oversampling
In the previous experiments, cross validation was
performed by partitioning the data into 1-sec
windows and splitting the windows into training or
testing sets. Dans cette section, we utilize a “leave-one-
exercise-out” cross validation approach to validate
models of posture detection that were trained
for individual participants. In this scheme, cross
validation is performed by training the model with
four of the five exercises, and the model is tested on
the exercise that was left out. For this experiment,
prediction is performed by training an SVM using
an RBF kernel with C = 10 and γ = .01, using the
HONV descriptor with 8×8 pixels per cell and 1×1
blocks for normalization.
One of the challenges of using customized
prediction models is that there is little control
over the number of samples collected per category,
potentially leading to an unbalanced data set.
Tableau 2 provides an overview of the category counts
per participant, indicating that each participant is
prone to different distributions of posture categories,
with some categories having relatively few samples.
Two common methods for dealing with unbal-
anced data are majority undersampling and minority
oversampling. Undersampling is not a good idea in
this case, because it would require the data to be
70
Computer Music Journal
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Chiffre 6. Individual
participant posture
detection accuracy of
different depth map sizes
en utilisant: HOG (un) and HONV
(b) descriptors.
Chiffre 7. Accuracy of
hand-posture detection for
HOG (un) and HONV (b)
descriptors with different
cell and block sizes.
Chiffre 6
Chiffre 7
Tableau 2. Hand-Posture Category Counts
for Test Participants (P1–P4)
Correct
Low Wrists
Flat Hands
P1
P2
P3
P4
6,011
3,917
2,262
6,111
162
1,336
3,376
286
1,021
47
0
27
under-sampled to the size of the smallest class. Dans
this case, our data would not be large enough to train
a robust model. Plutôt, we use oversampling to
balance the data, testing both the synthetic minor-
ity oversampling technique (SMOTE) and adaptive
synthetic sampling (ADASYN). Rather than simply
oversampling with replacement, SMOTE over-
samples by generating data in the feature space
by calculating features for synthetic samples that
lie between a minority sample, xi, and a neigh-
bor, xzi, selected randomly from the k nearest
neighbors. The new features are calculated using
xnew = xi + λ(xzi − xi) where λ is a value between
entre 0 et 1 selected randomly for each sample
(Chawla et al. 2002). Similarly to SMOTE, ADASYN
(He et al. 2008) uses interpolation to generate new
Johnson et al.
71
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
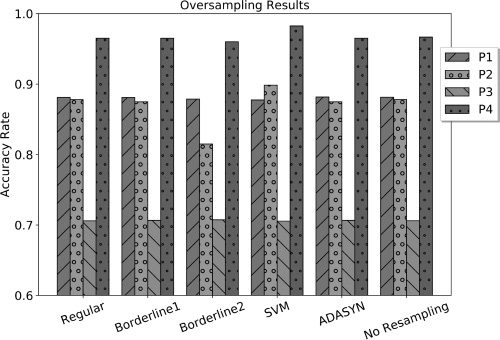
Chiffre 8. Accuracy of
hand-posture detection
using different
oversampling methods for
balancing the training
data of Participant (P.) 1–4.
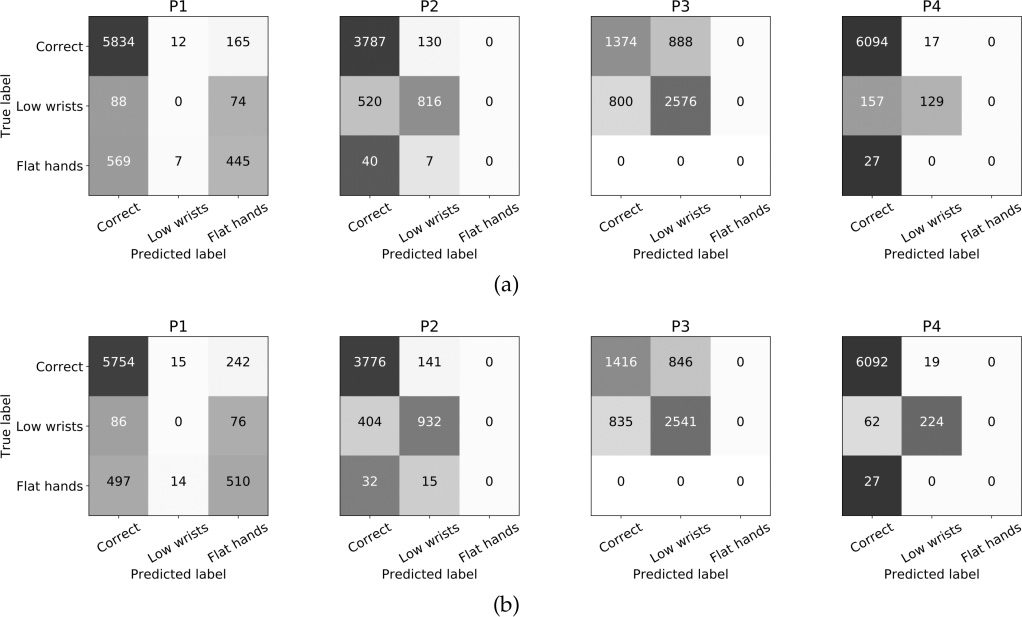
well balanced between two classes. En outre, un
review of the participant-based confusion matrices
from models trained with the SVM SMOTE (voir
Figure 9b) compared with the confusion matrices
for models trained with no oversampling (voir la figure
9un) shows that SVM SMOTE improves prediction
for certain minority classes. Par exemple, there are
improvements in the “flat hands” class for P1, comme
well as the “low wrists” class for P4. In cases where
the number of samples is substantially smaller than
the majority class, oversampling does not provide
an improvement.
In this section we have detailed the process
and results of tuning individual posture-detection
models and the features used to train the models.
Considering a trade-off between accuracy and
runtime performance, it was found that HONV
descriptors with a cell size of 8×8 and a block size
of 1×1 are optimal for a depth map of 128×128
pixels. The results of the exercise-based scheme for
cross validation show that it is possible to achieve
a working prediction model using as little as four
exercises for training. This is, cependant, dependent
upon the severity and frequency of a student’s errors
in posture. Such considerations would need to be
made when designing a detection-training interface.
In cases where the third posture category is too
petit, the model could instead be trained as a binary
classifier until enough samples of the category are
recorded.
Discussion
This work presented and evaluated an approach
for the automatic assessment of pianist hand
posture using data recorded with a depth camera.
Implementing this system into a CAMIT interface
requires converting assessment output (c'est à dire., le
detected hand-posture class) into feedback that
is presented to the student. Plus loin, utilizing
student-specific detection models raises a number
of implications for system design. In the rest of this
section we discuss considerations for assessment
feedback as well as some possible solutions to the
implications of training student specific models.
samples, but it is biased to select samples that are
harder to learn. Autrement dit, more synthetic
samples are generated for samples that are hard to
learn, effectively adapting the decision boundary
towards the hard-to-learn samples. Oversampling,
with SMOTE or ADASYN, generates a balanced
data set for training the posture-detection models.
There are four SMOTE variations for selecting
minority samples to use for sample generation.
Regular SMOTE simply uses a random selection
from all possible minority samples (Chawla et al.
2002). The Borderline-1 and Borderline-2 SMOTE
variations classify minority samples as “in danger”
if fewer than half the neighboring samples are from
the same class. The in-danger samples are then
selected to use for new sample generation (Han,
Wang, and Mao 2005). The fourth variation, SVM
SMOTE, takes the support vectors of a trained SVM
into consideration to select the samples used for
new sample generation (Nguyen, Tonnelier, and Kamei
2011). Chiffre 8 shows the results of the prediction
models for each of the individual participants, en utilisant
either of the SMOTE variants or ADASYN to balance
the data sets. Most of the oversampling variants have
little effect on performance of the inference models,
but there are a few exceptions. The SVM SMOTE
variant shows improved accuracy for participants
P2 and P4, and Borderline-2 shows a decrease in
accuracy for P2. Little change is shown for P3
with each technique, because the data were already
72
Computer Music Journal
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Chiffre 9. Confusion
matrices for each student
posture model trained
without oversampling (un)
and with a support vector
machine–based synthetic
minority oversampling
technique, SVM
SMOTE (b).
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Considerations for Interface Design
Based on our review of the CAMIT literature, we find
three main techniques that may be used to provide
beginning students with feedback about their
performance: (1) real-time feedback with auditory
cues (Ferguson 2006; Ng et al. 2007), (2) video
playback of a practice session augmented with visual
feedback (Ng et al. 2007), et (3) performance-quality
scores and visualizations (Blanco and Ramirez 2019).
To be effective, the interface must be motivating and
informative, and it must help the student improve.
As previous research has shown these techniques
être efficace, an ideal interface may provide
elements of each method. Choosing the proper
feedback method, cependant, must take a few aspects
into consideration: the amount of information
presented to the student, the student’s ability to
understand and process the information, et le
robustness of the detection system for providing
correct information.
The simplest feedback method would be to pro-
vide students with a single score or visualization to
indicate the quality of their performance. To assist
with self-evaluation, this method would allow stu-
dents to compare their performance during a practice
session to their performance of a previous session
or to the performance of an expert. En outre,
this design would allow a teacher to quickly track
students’ progress through sessions in which the
teacher is not present. One of the benefits of such a
system is that it would be the easiest for a student to
understand, making it ideal for young or beginning
students. En plus, using a score-based method
would support a tutoring system with gamifica-
tion to motivate students. Technically, the scoring
method would be the easiest to implement because
it is the least vulnerable to posture classification
Johnson et al.
73
errors, as improvement is relative to past perfor-
mances and minor errors in classification would not
be noticed as explicitly. The main drawback is a lack
of context to indicate what mistakes were made
and when they were made. Without the detailed
information students may not know exactly how to
improve their performance, especially if a teacher
is not available. Previous research into a visual
feedback system for performance quality, cependant,
shows this method to be effective for improving
performance (Blanco and Ramirez 2019).
A more informative approach to presenting
performance feedback would be video playback of
the performance, augmented with visual indication
of posture errors. With this method, students are able
to view exactly when and how mistakes were made.
En outre, as opposed to real-time feedback,
students are able to analyze their performance while
not focused on the other cognitively demanding
aspects of practice, such as playing the correct
notes. There are some challenges to using such a
système, though. Namely, the detection accuracy
must be near perfect, as detection errors may
adversely affect a student’s ability to self-evaluate.
En outre, students (especially young ones) may
find watching a recording of their performance to be
boring, demotivating, or both.
Providing real-time feedback, instead, may ad-
dress motivation issues by integrating feedback
directly into the practice session. Providing real-
time auditory cues immediately when mistakes
are recognized is already familiar to students, depuis
this is similar to the style of feedback they would
receive during training sessions with a teacher.
A system for beginners should only alert the stu-
dent to an issue after a specific period of time
playing with poor technique, as continuous feed-
back may be too cognitively demanding. With this
method, once the detection system recognizes that
a student performed with incorrect posture for a
number of seconds, it could trigger an auditory
alert, such as “remember to keep your wrists up.”
This method would help students self-evaluate
by receiving auditory cues exactly at the moment
they occur, allowing students to quickly adjust
their technique. Although the real-time feedback
may be cognitively challenging, it is most similar
to the feedback they already receive from their
teacher.
As technology in mixed reality (MR) advances,
implementing immersive systems may also prove
to be effective in music tutoring by providing
real-time feedback. Par exemple, our system for
hand-posture detection could be implemented with
an MR device such as the Microsoft HoloLens.
With this interface, students would be presented
with computer-generated visual cues overlaid upon
their hands, with feedback directing them on how
to adjust their hands for correct posture. We have
started exploring real-time feedback through MR for
music tutoring (Johnson and Tzanetakis 2017), mais
it has yet to be seen how effective this method is
for music tutoring. Future research is still needed
to provide guidance on how best to design MR
interfaces for real-time hand-posture correction.
Future Work
This study lays the groundwork for an automatic
assessment of hand posture to enhance piano
pedagogy for beginning piano students, but there
are still two main challenges to address. D'abord
is accuracy of the information provided by the
detection system and the robustness to variations in
hand formation not related to posture. The data used
in the experiments were taken from typical exercises
for beginning students, so there is only minimal
variation in hand movement and deformations,
such as the lateral spread of the fingers. Ainsi, le
detection system in its current form may not be
robust enough to scale to more-advanced techniques
required of students as they improve. Deuxième, en utilisant
a per-user training scheme requires effort from the
teacher and the student to train the model before
utiliser. If too much effort is required for training,
the system becomes impractical. We leave these
challenges for future work but discuss possible
methods for addressing them here.
One potential solution is to build a larger data set
with greater variation of hand shapes and playing
modes, with the goal of improving the generalization
of the detection model. One of the biggest challenges
with machine learning, cependant, is that building
74
Computer Music Journal
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
generalized models requires large-scale data sets;
Par exemple, one of the largest data sets used in
machine learning research, ImageNet (Deng et al.
2018), has has over 14 million images at the time of
en écrivant (see http://image-net.org/about-stats). Ce
especially becomes a challenge when working on
new problems, such as the detection of a pianist’s
hand posture, that have little or no existing data and
whose data require domain experts such as piano
teachers for annotation. En outre, students’
hand-posture errors may not be limited to those
we present in this article. Although this could be
addressed through one-class classification, dans lequel
training is performed using only correct posture,
such a system would not be able to provide a student
with information about how to correct errors. À
address the challenges related to large-scale data
collection, we propose a per-user training system
for posture detection in which student and teacher
work together with the interface to train the posture-
detection system. We have shown with our research
that this is possible with limited amounts of data.
A per-user training scheme has the benefit that
detection models can be customized to each stu-
dent’s skill level and can overcome the challenges
in obtaining enough data for generalization. Cus-
tomization may be achieved by allowing teachers to
define their own posture categories and to choose
the appropriate training exercises that match the
students’ skill levels and playing style. Giraldo et al.
(2019) took a similar approach in their work on
prediction of tone quality to overcome challenges of
subjectivity in tone perception. Per-user training is
not without its drawbacks, cependant. Most notable
is the fact that it takes time and effort from both
the teacher and the student to train the models. If
training is too arduous, such as labeling an entire
recording, then the system will not be used. Addi-
tionally, teachers cannot be expected to be experts
in machine learning, so a training system should
be easy to understand. To address difficulties such
as these, there is emerging work in “human-in-the-
loop” machine learning, such interactive machine
learning (Amershi et al. 2014; Holzinger 2016; Chen
et autres. 2018) and active learning (Settles 2009), dans
which humans work directly with a training sys-
tem to build and improve learning models. Active
learning works by selecting samples to be labeled
based on some criterion, such as maximum uncer-
tainty, then asking a human participant to label
the selected samples. Interactive machine learning
(IML) builds on this idea with a focus on designing
interfaces in which humans work with the machine
to improve the learned model through iterative
train-feedback-correct cycles (Amershi et al. 2014).
Integrating IML and active learning techniques into
model training will help improve model robustness
by making per-user training feasible and will help
improve accuracy through iterative training cycles.
Assuming we are able to achieve near-perfect
classification of hand posture with the methods
proposed above, there are still times in which it
may not be appropriate to analyze a student’s hand
posture, such as when the hand is in transition.
Although transitions are generally minimal for
beginning students, providing posture feedback
for more-advanced students should ignore these
transient periods, so as not to provide incorrect
feedback. It may be possible to address this by
adding another category to the posture-detection
model to identify hand positions that should be
ignored. A more robust method may be to integrate
gesture detection that tracks hand motion, to first
identify when hands are in an appropriate state
for posture detection. Integrating these capabilities
would improve the decision about when to present
posture feedback to the student.
Conclusion
In this article we have presented a system for
detecting piano stutents’ mistakes in hand posture
from a single frame of a depth-camera recording.
Using a per-pixel classification scheme for hand
segmentation, we found that the DCF descriptors
developed by Liang, Yuan, and Thalmann result
in the best segmentation accuracy. The higher
accuracy, compared with DIF, is due to DCF’s
implementing denser sampling of context offsets
closer to the pixel being classified. Although we
achieve positive results with the current sampling
distribution, there are still misclassified pixels in
areas where the hand is in direct contact with the
Johnson et al.
75
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
piano. To account for this, future work using a
sampling distribution that is even more densely
sampled near the classification pixel should provide
context that is more fine-grained, providing better
classification. With hands segmented from the
image, an SMV is used to detect the posture of
each hand. Evaluation of posture-detection models
showed that the HONV descriptors developed by
Tang and coworkers provide the best performance.
Plus loin, the HONV approach was improved by
adding block normalization to the process of feature
extraction. To account for shape and size variations
in hands as well as varying practice environments,
we implement detection models customized and
trained for individual students. Using individual
models presents a problem, cependant, as students
will not always perform with an equal distribution
of posture categories, resulting in unbalanced data
for training. Our experiments have shown that
this problem can be addressed with oversampling
in the feature space using SMOTE. The results
presented in this work show the effectiveness of
the proposed computer-vision pipeline for posture-
detection models trained for individual piano
students. We have discussed thoughts on designing
interfaces to provide feedback to piano students
using the detection system, as well as on designing
interfaces using IML to improve the process of
training individually customized detection models.
The design of these interfaces is left for future
recherche.
Les références
Amershi, S., et autres. 2014. “Power to the People: Le
Role of Humans in Interactive Machine Learning.” AI
Magazine 35(4):105–120.
Blanco, UN. D., et R. Ramirez. 2019. “Evaluation of
a Sound Quality Visual Feedback System for Bow
Learning Technique in Violin Beginners: An EEG
Study.” Frontiers in Psychology 10:Art. 165.
Breiman, L. 2001. “Random Forests.” Machine Learning
45(1):5–32.
Burnam, E. M.. 2005. A Dozen a Day Preparatory Book.
Milwaukee, WI: Willis.
Carfagni, M., et autres. 2017. “On the Performance of the
Intel SR300 Depth Camera: Metrological and Critical
Characterization.” IEEE Sensors Journal 17(14):4508–
4519.
Chawla, N. V., et autres. 2002. “SMOTE: Synthetic Minor-
ity Over-Sampling Technique.” Journal of Artificial
Intelligence Research 16(1):321–357.
Chen, N.-C., et autres. 2018. “AnchorViz: Facilitating Clas-
sifier Error Discovery through Interactive Semantic
Data Exploration.” In Proceedings of the International
Conference on Intelligent User Interfaces, pp. 269–280.
Dalal, N., et B. Triggs. 2005. “Histograms of Oriented
Gradients for Human Detection.” In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pp. 886–893.
Dalmazzo, D. C., et R. Ramirez. 2019. “Bowing Gestures
Classification in Violin Performance: A Machine
Learning Approach.” Frontiers in Psychology 10:Art.
344.
Dannenberg, R.. B., et autres. 1990. “A Computer-Based Multi-
Media Tutor for Beginning Piano Students.” Interface
19(2–3):155–173.
Dannenberg, R.. B., et autres. 1993. “Results from the Piano
Tutor Project.” In Proceedings of the Biennial Arts and
Technology Symposium, pp. 143–150.
Deng, J., et autres. 2018. “ImageNet: A Large-Scale Hierarchical
Image Database.” In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pp. 248–
255.
Ferguson, S. 2006. “Learning Musical Instrument Skills
through Interactive Sonification.” In Proceedings of
the International Conference on New Interfaces for
Musical Expression, pp. 384–389.
Giraldo, S., et autres. 2019. “Automatic Assessment of Tone
Quality in Violin Music Performance.” Frontiers in
Psychologie 10:334.
Hadjakos, UN. 2012. “Pianist Motion Capture with the
Kinect Depth Camera.” In Proceedings of the Sound
and Music Computing Conference, pp. 303–310.
Hadjakos, UN., F. Lefebvre-Albaret, et moi. Toulouse. 2009.
“Three Methods for Pianist Hand Assignment.” In
Proceedings of the Sound and Music Computing
Conference, pp. 321–326.
Han, H., W.-Y. Wang, and B.-H. Mao. 2005. “Borderline-
SMOTE: A New Over-Sampling Method in Imbalanced
Data Sets Learning.” In D.-S. Huang, X.-P. Zhang, et
G.-B. Huang, éd.. Advances in Intelligent Computing:
International Conference on Intelligent Computing.
Berlin: Springer, pp. 878–887.
Il, H., et autres. 2008. “ADASYN: Adaptive Synthetic
Sampling Approach for Imbalanced Learning.” In
Proceedings of the IEEE International Joint Conference
on Neural Networks, pp. 1322–1328.
76
Computer Music Journal
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Holzinger, UN. 2016. “Interactive Machine Learning for
Health Informatics: When Do We Need the Human-in-
the-Loop?” Brain Informatics 3(2):119–131.
Johnson, D., and G. Tzanetakis. 2017. “VRMin: Using
Mixed Reality to Augment the Theremin for Musical
Tutoring.” In Proceedings of the Conference on New
Interfaces for Musical Expression, pp. 151–156.
Johnson, D., et autres. 2016. “Detecting Pianist Hand Posture
Mistakes for Virtual Piano Tutoring.” In Proceedings
of the International Computer Music Conference, pp.
168–171.
Kang, B., et autres. 2016. “Hand Segmentation for Hand–Object
Interaction from Depth Map.” In Proceedings of the
IEEE Global Conference on Signal and Information
Processing, pp. 259–263.
Keskin, C., et autres. 2013. “Real Time Hand Pose Estimation
Using Depth Sensors.” In A. Fossati et al., éd.. Con-
sumer Depth Cameras for Computer Vision: Research
Topics and Applications. Berlin: Springer, pp. 119–
137.
Lai, K., et autres. 2011. “A Large-Scale Hierarchical Multi-View
RGB-D Object Dataset.” In Proceedings of the IEEE
International Conference on Robotics and Automation,
pp. 1817–1824.
Li, M., et autres. 2014. “Using the Kinect to Detect Potentially
Harmful Hand Postures in Pianists.” In Proceedings
of the Annual International Conference of the IEEE
Engineering in Medicine and Biology Society, pp.
762–765.
Liang, H., J.. Yuan, and D. Thalmann. 2014. “Parsing
the Hand in Depth Images.” IEEE Transactions on
Multimedia 16(5):1241–1253.
Liang, H., et autres. 2016. “Barehanded Music: Real-Time
Hand Interaction for Virtual Piano.” In Proceedings of
the ACM SIGGRAPH Symposium on Interactive 3D
Graphics and Games, pp. 87–94.
Lu, H., et autres. 2008. “iDVT: An Interactive Digital Violin
Tutoring System Based on Audio-Visual Fusion.” In
Proceedings of the ACM International Conference on
Multimedia, pp. 1005–1006.
MacRitchie, J., et un. P.. McPherson. 2015. “Integrating
Optical Finger Motion Tracking with Surface Touch
Events.” Frontiers in Psychology 6:Art. 702.
Mora, J., et autres. 2006. “Assisted Piano Pedagogy through
3D Visualization of Piano Playing.” In Proceedings of
the IEEE International Workshop on Haptic Audio
Visual Environments and Their Applications, pp. 157–
160.
Ng, K., P.. Nesi, and V. S. Marta. 2008. “i-Maestro:
Technology-Enhanced Learning and Teaching for
Music.” In Proceedings of the International Conference
on New Interfaces for Musical Expression, pp. 225–
228.
Ng, K. C., et autres. 2007. “3D Augmented Mirror: A Mul-
timodal Interface for String Instrument Learning and
Teaching with Gesture Support.” In Proceedings of the
International Conference on Multimodal Interfaces,
pp. 339–345.
Nguyen, H. M., E. W. Tonnelier, and K. Kamei. 2011. “Bor-
derline Over-Sampling for Imbalanced Data Classifica-
tion.” International Journal of Knowledge Engineering
and Soft Data Paradigms 3(1):4–21.
Oka, UN., and M. Hashimoto. 2013. “Marker-Less Piano
Fingering Recognition Using Sequential Depth Images.”
In Proceedings of the Korea-Japan Joint Workshop on
Frontiers of Computer Vision, pp. 1–4.
Pedregosa, F., et autres. 2011. “Scikit-Learn: Machine Learning
in Python.” Journal of Machine Learning Research
12:2825–2830.
Percival, G., Oui. Wang, and G. Tzanetakis. 2007. “Effective
Use of Multimedia for Computer-Assisted Musical In-
strument Tutoring.” In Proceedings of the International
Workshop on Educational Multimedia and Multimedia
Éducation, pp. 67–76.
Raptis, S., et autres. 2005. “IMUTUS: An Effective Practicing
Environment for Music Tuition.” In Proceedings of
the International Computer Music Conference, pp.
383–386.
Riley, K., E. E. Coons, and D. Marcarian. 2005. “The
Use of Multimodal Feedback in Retraining Complex
Technical Skills of Piano Performance.” Medical
Problems of Performing Artists 20(2):82–88.
Salgian, UN., and D. Vickerman. 2016. “Computer-Based
Tutoring for Conducting Students.” In Proceedings of
the International Computer Music Conference, pp.
159–162.
Schoonderwaldt, E., UN. Askenfelt, and K. F. Hansen. 2005.
“Design and Implementation of Automatic Evaluation
of Recorder Performance in IMUTUS.” In Proceedings
of the International Computer Music Conference, pp.
97–103.
Settles, B. 2009. “Active Learning Literature Survey.”
Technical Report 1648. Université du Wisconsin-
Madison, Department of Computer Science.
Shotton, J., et autres. 2011. “Real-Time Human Pose Recogni-
tion in Parts from Single Depth Images.” In Proceedings
of the IEEE Conference on Computer Vision and Pattern
Recognition, pp. 1297–1304.
Spinello, L., and K. Ô. Arras. 2011. “People Detection
in RGB-D Data.” In Proceedings of the International
Conference on Intelligent Robots and Systems, pp.
3838–3843.
Johnson et al.
77
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Tang, S., et autres. 2013. “Histogram of Oriented Normal
Vectors for Object Recognition with a Depth Sensor.”
In K. M.. Lee et al., éd.. Computer Vision: ACCV 2012.
Berlin: Springer, pp. 525–538.
Tits, M., et autres. 2015. “Feature Extraction and Expertise
Analysis of Pianists’ Motion-Captured Finger Ges-
tures.” In Proceedings of the International Computer
Music Conference, pp. 102–105.
Tompson, J., et autres. 2014. “Real-Time Continuous Pose
Recovery of Human Hands Using Convolutional
Networks.” ACM Transactions on Graphics 33(5):
Art. 169.
je
D
o
w
n
o
un
d
e
d
F
r
o
m
h
t
t
p
:
/
/
d
je
r
e
c
t
.
m
je
t
.
e
d
toi
/
c
o
m
j
/
je
un
r
t
je
c
e
–
p
d
F
/
/
/
/
4
3
1
5
9
2
0
0
5
1
1
1
/
c
o
m
_
un
_
0
0
5
0
0
p
d
.
j
F
b
oui
g
toi
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
78
Computer Music Journal