The Material Turn in
the Study of Form: From
Bio-Inspired Robots
to Robotics-Inspired
Morphology
Marco Tamborini
Department of Philosophy
Technische Universität Darmstadt,
Germany
This paper investigates the mechanisms of knowledge production of twenty-first
century robotics-inspired morphology. How robotics influences investigations into
the structure, development, and change of organic forms? Which definition of
form is presupposed by this new approach to the study of form? I answer these
questions by investigating how robots are used to understand and generate new
questions about the locomotion of extinct animals in the first case study and in
high-performance fishes in the second case study. After having illustrated the
landscape of twentieth-century morphology, I will reflect on the definition of form
adopted in twenty-first century robotics-inspired morphology as well as on the
differences between this approach to the study of form and the so-called nature-
inspired disciplines, such as bionics or biomimetics. In the conclusion, I suggest
that we are now in a material turn in morphology, characterized by the coex-
istence of the robotic, the virtual, and the real, which enables an understanding
of how the structures and dynamics of shapes change over time.
Introduction
In the last decades, the implementation of robotics in diverse disciplines is
radically changing how knowledge is produced, tested, and validated.
Philosophers and historians of science and technology have started investi-
gating the possible strengths and shortcomings of this implementation.
Topics, such as the interrelation between robotics, AI, and the Internet of
Several colleagues and friends have helped me at various stages of this study. I would like to
thank Adrian Currie and George Lauder. Particularly, I would like to thank John Nyakatura
for very helpful discussions on morphology and bio-inspired robotics.
Perspectives on Science 2021, vol. 29, no. 5
© 2021 by The Massachusetts Institute of Technology
https://doi.org/10.1162/posc_a_00388
643
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
644
The Material Turn
Things, and Human-Robot Interaction, are now part of mainstream philo-
sophical research and debate (see, for example, Floridi 2008; Lacerda et al.
2019; Liggieri and Müller 2019; Müller 2020). These subjects have also
been analyzed by relating robotic automation to broader social, economic,
and ethical issues, such as the pros and cons of using robots in the workplace.
This paper situates itself within the technoscientific investigation of
robotics. It does so by examining to what extent, if any, robotics1 is changing
the way in which scientists work with the notion of organic form. As the
study of form and its changes through time, morphology has considerably
transformed its knowledge claims and possibilities through the introduction
of robotics. This application was first and foremost enabled by an economic
shift. Due to the decreasing costs of the components and devices necessary to
design and manufacture robots, several laboratories worldwide could either
create their own robots to better understand morphogenetic processes or
collaborate with engineers to develop joint projects (Gravish and Lauder
2018; Krause et al. 2011).
In this paper, I look at the epistemic repercussions of using robotics for pro-
ducing morphological knowledge: how does robotics influence investigations
of the structure, development, and change of organic forms? Which definition
of form is presupposed by this new approach to form study? My answer to those
questions is that robotics is changing the knowledge claims produced by and
possibilities of morphological investigations. The design and production of
concrete robots that interact with their environment through a feedback loop
enables biologists to create and access an explanandum, the form-function com-
plex that would be otherwise non-manipulable and non-researchable. Further-
more, the examination of robots’ “behaviors consistent with biological
observation” and the analyses of their “reactive behavior” helps biologists “gen-
erate new biological hypotheses of organic function,” as engineer Nick Gravish
and biologist George V. Lauder put it in a programmatic paper on the features
of robotics-inspired biology (Gravish and Lauder 2018, p. 2).
This approach, though not entirely new, is rooted in a specific set of prac-
tices and notions of organic form that was developed throughout the twentieth
century. With this statement, I am not playing the perverse game of showing
that nothing is entirely new. I am not merely detecting a possible predecessor
of current robotics-based morphology. Rather, I show that this approach to the
study of form is based on a methodology that departed from biomimetics,
another morphological and highly technological discipline. In other terms,
1.
Following biologist Jens Krause and colleagues, I will use a minimal definition of
robot. It can be defined “as a machine that is able to interact physically with its environ-
ment and perform some sequence of behaviors, either autonomously or by remote control”
(Krause et al. 2011, p. 369).
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Perspectives on Science
645
the theoretical framework of robotics-inspired morphology, specifically, and
biology in general, is different from that of bio-inspired robotics. Despite
the similarity of seeing form changes through an engineer’s lens and the
continuous knowledge and practice exchange between these disciplines, the
two approaches to the riddle of form should be kept divided in order to
correctly understand their practices and knowledge claims. Therefore, in this
paper, I will examine traits peculiar to robotics-inspired morphology.
To develop this point, I will investigate two emblematic case studies that
came from two quite different biological disciplines and deal, therefore, with
two diverse sets of data and specimens. The first case study is paleontological,
focusing on the reconstruction of the morphology and locomotion of an
extinct organism, the Orobates pabsti. It is an early example of tetrapods. It
lived in the early Permian era, circa 290 million years ago. The fossils were
unearthed close to Tambach-Dietharz, a small town in Germany, in 1998.
The second case study is about the form-function complex, which enables
tunas’ high-performance swimming. Thus, it is taken from a so-called
neontological discipline. In biological and philosophical literature, “neontolo-
gists” are biologists who deal with living organisms (e.g., Currie 2019, Depew
and Simpson 2006, Sepkoski 2012, Gould 1980). Conversely, paleontologists
work and investigate extinct and fossilized plants and animals. Besides marking
an important difference regarding two different temporal dimensions in biology,
namely deep and shallow time, this distinction emphasizes the different features
of data available to these biologists. Unlike neontologists, paleontologists always
deal with incomplete and imperfect data and cannot perform investigations
in vivo. By choosing to focus on both the morphology of recent and extinct
organisms, I will be therefore able to provide a quite satisfactory overview of
the possibilities and limits of robotics-inspired morphology.
However, tempting as it might be, I would neither develop nor support
the thesis that robotics is closing the gap between experimental and non-
experimental sciences – in this case, between paleontology and neontology
(Turner 2007). Rather, I argue that robotics is emblematically calling attention
to how knowledge production relies on a technological setting. Hence, in
delineating and historicizing some pillars of the twenty-first century study
of form, this paper is intended to broadening historians’ and philosophers’ of
science focus on how (morphological) knowledge production and technology
are deeply entangled. It signposts the concrete entwinement between technol-
ogy and theory to visualize and study morphological explananda. By doing so,
it contributes to the broader history and philosophy of the study of form during
the last two centuries, a history and philosophy which is still being written.2
2. On the broader history of twentieth-century morphology see, for example, Love
2003, 2006; Tamborini 2020b, 2020c, under contract.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
646
The Material Turn
First, I will portray the landscape of twentieth-century morphology to
detect different notions of organic forms. Second, I move to the two em-
blematic case studies. Then, I will examine the broader theoretical payoff
and structures of twenty-first century robotics-inspired morphology. In the
conclusion, I will reflect on what I name the material turn in the study of
form.
Twentieth-Century Morphology
1.
During the first half of the twentieth century, evolutionary morphology
gradually lost its central disciplinary importance. It transformed itself from
being “the first evolutionary science” (Bowler 1996, p. 17) to a discipline
that, according to biologist Ernst Mayr, one of the main architects of the
modern synthesis of evolution, i.e., the merging of Darwinian theory with
Mendel’s genetics during the 1930s, did not contribute at all to the
advancement of evolutionary thought (Mayr 1980, 1982). Despite Mayr’s
quite biased judgment and disciplinary morphology breakdown, a “desire
for morphology” transversally permeated the entire twentieth century
(Tamborini 2020d). Within this strong desire for investigating form’s
structures and the mechanisms of their possible changes through time,
at least four different and conflicting definitions of organic forms and cor-
responding methodologies could be identified.
First, the organic form was equated with a classical machine. The cham-
pion of this view was German-born American biologist Jacques Loeb
(1859–1924). In The Dynamics of Living Matter, Loeb stated that “living
organisms may be called chemical machines, inasmuch as the energy for
their work and functions is derived from chemical processes, and inasmuch
as the material from which the living machines are built must be formed
through chemical processes” (Loeb 1906, p. 1). The recognition of the iden-
tity between organisms and chemical machines put to the foreground the
old issue of the organism’s intrinsic purpose as a stronghold for the form’s
autonomy over its possible reduction to mechanical principles. Unlike
machines, organisms seemed to maintain a sort of self-preservation and
purposeful behavior. Loeb replied to this objection that “the fact that the
machines which can be created by man do not possess the power of auto-
matic development, self-preservation, and reproduction constitutes for the
present a fundamental difference between living machines and artificial ma-
chines. We must, however, admit that nothing contradicts the possibility
that the artificial production of living matter may one day be accomplished”
(Loeb 1906, p. 1). Hence, the first approach to the form problem was rooted
in a purely mechanistic conception of life, as one of Loeb’s books was titled.
This view was bolstered by an optimistic trust in technology progress
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Perspectives on Science
647
towards the development of automatic machines—as did, in fact, happen
over the course of the twentieth century.
Second, in open contrast with Loeb and other biologists, a vitalist defi-
nition of form was advanced. German biologist Hans Driesch (1867–1941)
was one of its main supporters. After having supported mechanistic theo-
ries, he oriented himself towards neo-vitalism after a series of experiments
on sea urchins. He shook sea urchin embryos at two- and four-cell stage,
thus separating them into a single cell. He discovered, then, that every
separated cell was able to develop itself into a complete sea urchin. Driesch
interpreted these results as a powerful smoking gun for an anti-mechanistic
and vitalist theory of morphogenesis (e.g., Driesch 1892, 1898, 1919).
Every cell had an intrinsic power to form an entire organism. As the Baltic
biologist Johann von Uexküll (1864–1944) cogently summarized the
theoretical payoff of Driesch’s experiments: “Driesch had succeeded in dem-
onstrating there was no trace of any machine-structure in the germ cell, and
that it consisted rather of equivalent parts. This explodes the dogma that
the organism is only a machine” (translation in Cordeschi 2002, p. 71).
Driesch argued, therefore, that morphogenesis should not be understood
in mechanical terms. On the contrary, there was a vital principle responsible
for the development of the organism as a whole, even if this was cut up.
Following Aristoteles, he named this vital force Entelechia, or the molding
principle of form.
During the twentieth century, a third approach to the study of organic
form was formulated. Their practicians considered this methodology to be in
between vitalism and mechanism. They named it organicism; this third way
found great recognition in the first half of the twentieth century biology and
recently made a resurgence the fore of today’s evolutionary thought. As
philosopher Jan Baedke showed, the basics strands of organicism were, “i)
neither vitalism nor reductionist mechanicism is the right theoretical or
methodological framework for biology, ii) “Organism” is (one of ) the most
central theoretical concept(s) in biology, iii) Biology should study the organ-
ism as a whole” (Baedke 2019). Organismic biologists, such as Ludwig von
Bertalanffy (1901–1972), Conrad Hal Waddington (1905–1975), and Paul
Alfred Weiss (1898–1989), defended an anti-reductionistic definition of
organic form and strongly condemned any use of vital forces (see Peterson
2016; Haraway 1976). Echoing Goethe and other romantic biologists, they
put an emphasis on the notion of form as more than the mere sum of the parts
that compose it. Furthermore, they stressed that form’s material properties
are key factors in morphogenetics processes. They defended the idea that
the engineers could take advantage of form’s intrinsic dynamics to design
nature-inspired technologies and products (Tamborini 2020b, under
review). A decade ago, computer scientist Rolf Pfeifer explained in an
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
648
The Material Turn
influential Science paper exactly that the translation from nature to techno-
logical artifacts is based on form’s intrinsic proprieties. As they put it,
“exploiting the dynamics provided by materials and morphological proper-
ties as well as the interaction between physical and information processes
promises to extend the capabilities of established control-based robot design
methodologies” (Pfeifer et al. 2007, p. 1093).
Besides these three movements, which fought against each other in the
mainstream biological debate thorough the first half of the twentieth
century, another, albeit apparently quite peripheric, approach to the anal-
ysis of organic form problem made its mark. It never became a unitary
movement. Rather, it traversed the other three movements during the last
century. Biologists who supported this study of form, which I would like to
call the architectural approach to morphology, often ended up being either
mechanists, or vitalists, or organicists. Furthermore, its supporters came
from a myriad of biological subdisciplines. It was defended by biologists
interested in evolutionary questions, behavioral and biomechanical issues,
and paleontology, and other areas of investigation.
The practitioners of this morphological attitude identified form as what
emerged from organizational principles. The chemical properties of organ-
isms or machines, i.e., its materiality, were only one aspect for understanding
the essence of form. Central was rather the notion of arrangement. As Amer-
ican zoologist Herbert Spencer Jennings (1868–1947) wrote, “we find in
lower organisms, as in higher animals, that the nature of the reactions is
mainly to characteristics arrangements of material, not to the proprieties of
simple unarranged substance. These lower organisms therefore furnish
problems which do not differ in kind from what we find in higher animals”
( Jennings 1910, p. 368). The focus on form’s functional3 arrangement
enabled the biologist to link organisms to machines, from a different and
new perspective. Jennings announced that this methodology was able “to
show that lower organisms, like higher ones, are typical arrangements of
material; are structures; are in this respect machine-like; not masses of a uni-
form substance” (Jennings 1910, p. 360; italics in original). By shifting the
stress from materials to structures, the morphologists would be able to begin
an investigation on how possible structural elements may be combined to
obtain organized forms. “From a certain mass of material,” noted Jennings,
“we could make either a clock or a doorbell or a steel trap or a musical
instrument,—and we could easily so arrange these that each would respond
in its characteristic way when acted upon by an electric current […] The
3. As philosopher Roberto Cordeschi noted Jennings’ principle it “seems correct to
call functional, since it concerns the organization of an action system and not its material
composition” (Cordeschi 2002, p. 24).
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Perspectives on Science
649
specific action of each depends on the specific arrangement of its material.
This is exactly what we find in organisms, including the lowest as well as the
high” (Jennings 1910, p. 361).
Though he came from a different background, German anatomist and
physician Hans Petersen (1885–1946) stressed the same point. He came
up with a new definition of form that cogently summarized this idea.
He defined form “as a ready-to-use solution to a constructional task [fertige
Lösung einer konstruktiven Aufgabe]” (Petersen 1922, p. 339). Forms were
equated with constructions, i.e., they were meant as the coherent result
of assembling different elements to obtain a stable and ordered object.
Therefore, an organism’s development was primarily meant as a technical
problem.
Another important feature of this architectonical approach to morphol-
ogy was the use of a technical vocabulary to describe form adaptation. For
example, German paleontologist Adolf Seilacher (1925–2014) described
the morphological features of fossilized life traces in a very technical way:
the shape characteristics of many life traces (=“animal artifacts”!)
[(=“tierische Artefakte!”)] are primarily purpose-related [zweckbedingt].
They can therefore be directly understood not only by their causal
relationship with the construction of their author [mit der Konstruktion
ihres Urhebers], but also by their ecological and “technical” meaning
(i.e., teleological) [ihre ökologische und “technische” Bedeutung (d.h.
teleologisch)]. (Seilacher 1951, p. 279)
Moreover, British invertebrate paleontologist Martin Rudwick (1932–)
spoke of a quasi-engineering approach to form analyses to indicate his
emphasis on form arrangement. He used it for grounding the inference from
a form, i.e., a structure, to its possible function. For instance, he wrote
From our knowledge of natural and artificial aerofoils, and of the
structural requirements of their successful operation, we conclude
that the pterodactyl forelimb would have been physically capable
of functioning as an aerofoil. From our knowledge of the energy
requirements for powered flight and of the energy output of
vertebrate muscle, we conclude that it would not have been capable
of functioning as a flapping wing for powered flight. (Rudwick
1964, p. 33)
Following this lead, in their influential book Mechanical Design in Organism,
Stephen A. Wainwright and colleagues declared: “We believe that the
study of mechanical design in organisms using the approach of the mechan-
ical engineer and the materials scientist can promote an understanding of
organisms at all levels of organization from molecules to ecosystems”
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
650
The Material Turn
(Wainwright et al. 1976, p. v). Therefore, the use of a technical vocabulary
encouraged the examination of the similar design principles shared by both
machines and organisms.
From a methodological perspective, these practitioners quite chorally
hold the view that the functional organization of organic form, i.e., the
principle responsible for its internal construction, could be grasped only
by bringing together all the diverse elements and relations that hold it
together. Consequently, the majority of them defended what they termed
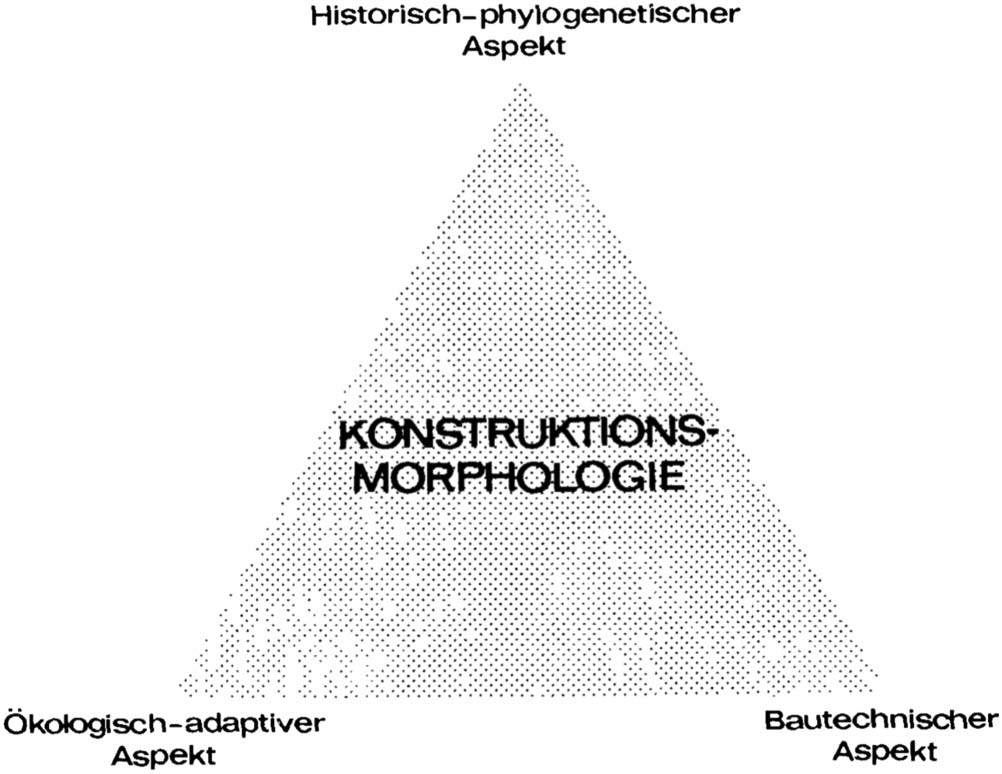
a synthetic methodology. For instance, Seilacher (see Figure 1) proposed a
working concept for morphology aimed at encompassing all the possible
elements responsible for morphogenesis. He saw form as the result of
three mutually constraining factors: fabrication, functional, and phylogenic
limitations. In order to provide possible morphological explanations, the
biologists should focus on all of them and examine which of these elements
played a greater role. This was, in a nutshell, the main aim of his famous
triangle (Tamborini 2020a).
The architectonical approach to form would be adopted at-length in
biomechanical studies, and, as I will show in the following pages, it would
offer the theoretical and historical framework for the current implementa-
tion of robotics in morphological investigations.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Figure 1.
from Wiley.
Seilacher’s triangle as published in 1970. Reprinted with permission
Perspectives on Science
651
2.
From Bio-Robotics to Robotics-inspired Morphology
Case 1: OroBOT
2.1.
To illustrate the role of robotics in recent morphological investigations, I
will now turn to two emblematic case studies. The first one is about a clas-
sic topic in mechanical morphology: the reconstruction and explanation of
organisms’ locomotion. Although the topic is rather conventional—for
instance, it was one of the main research topics of Petersen—the methods
of investigation are pretty innovative. The organism under investigation
is the Orobates pabsti. It is a 4-legged vertebrate that went extinct about
300 million years ago. The study of the morphology of this well-preserved
specimen is quite important since it could offer some precious insights into
the evolution of terrestrial vertebrates. Since the Orobates are an early out-
growth of the lineage that led to amniotes, which really completed the
vertebrates’ transition to land by becoming independent from open water
during early development, the comprehension of how these specimens were
able to move from water onto land is essential for a better understanding of
one of the major transitions in vertebrate evolution.
A multidisciplinary team of biologists, engineers, and designers was set
up to cope with this problem. They were faced with the difficulty of recon-
structing the morphology of an extinct animal, coming up with a possible
hypothesis on its locomotion, and ultimately using morphological data to
investigate broader biological transitions and evolutionary mechanisms.
Their method of investigation was technologically guided. German biolo-
gist John Nyakatura and colleagues carefully reported in Nature their meth-
odology. First, they used CT and 3D reconstructions to obtain a digital
model of the fossilized Orobates. Second, they digitalized the fossil track-
ways, which were supposed to belong to the Orobates. Third, they obtained
data on the mechanical principles of sprawling locomotion of extant tetra-
pod species. Fourth, a digital marionette of the Orobates was designed, and
dynamic and kinematic simulations of Orobates’ locomotion were run. Fifth,
having obtained this great mass of data, the scientists used it to narrow
down the possibilities and thus were able to eliminate unlikely gaits. This
led to the creation of what they termed the sprawling gait space of the
Orobates (Nyakatura et al. 2019).
Last, they designed the robot OroBOT (see Figure 2) to account for
dynamics of locomotion of the Orobates. The OroBot was built in collaboration
with bioengineers at the École Polytechnique Fédérale de Lausanne (EPFL)
in Lausanne. The OroBot’s spine was segmented into eight operated joints:
two for the neck, four for the trunk, and two for the tail. The feet consisted
of three passive, compliant joints. The designed parts of OroBOT were made
of polyamide plastic material and created with laser selective sintering.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
652
The Material Turn
Figure 2. OroBOT (Nyakatura et al. 2019). Credit: Alessandro Crespi (EPFL
Lausanne).
Nyakatura and colleagues described their intent; the
OroBOT was designed to closely mimic the anatomy of the Orobates
fossil, the mass distribution of body segments and the position of the
centre of mass – The design and control of the robotic system (the
physical OroBOT model) was based on a previous biomimetic
platform that successfully replicated the kinematics and dynamics of
a walking salamander, which was here altered to match Orobates
morphology. (Nyakatura et al. 2019, p. 354)
The robot was employed as a technical platform for understanding the
animal’s gait function. Scientists analyzed its form-function complex and
tested 15 possible gaits against OroBOT’s functional arrangement. Based
on the digitalized data and on the use of the robot, the biologists were then
able to understand how Orobates moved its four legs on the land. In fact,
with the OroBOT the scientists were able to perform experiments under
real world physical conditions (gravity, friction, etc.) and to estimate power
expenditure in different simulated gaits and postures. The results suggested
that the Orobates had a more upright, advanced, and mechanically energy-
saving locomotion than the first tetrapods. This discovery, therefore,
suggested that “these advanced terrestrial locomotor properties may be
assumed to have been present in the last common ancestor of diadectids and
amniotes—that is, within the amniote stem lineage and preceding the
subsequent rapid radiation of crown amniotes” (Nyakatura et al. 2019,
p. 354). As paleontologist Stuart Sumida reported to Scientific American,
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Perspectives on Science
653
“Nyakatura and his colleagues have gotten us as close as we can get without
a time machine” (Wong 2019).
Nyakatura and colleagues’ robotics-inspired morphological research
was so innovative that the journal Nature dedicated the cover of Volume
565, Issue 7739 to it. Indeed, the OroBOT was not only used as a
platform to ask new questions and gain more data on what happened
in earth history millions of years ago but due to its salamander-like struc-
ture, it was also used as inspiration to further combine bioinspired robots
with neuroscience and genetic data to investigate broader biological ques-
tions. The salamander is a prime model organism due to its ability to
regenerate locomotion after a total spinal resection; in a recent publica-
tion, neuroscientist Dimitri Ryczko and colleagues proposed to bring
together “functional genomics, systems neuroscience, numerical model-
ing, and robotics approaches [to] understand the interplay between central
and peripheral mechanisms” (Ryczko, Simon, and Ijspeert 2020, p. 1).
Specifically, they used salamander neuromechanical models and robots
to “decipher how movements emerge from the interactions between central
and peripheral signals” (Ryczko, Simon, and Ijspeert 2020, p. 1). Hence,
the robotics-inspired morphology was used to both gain access to the form
study of extinct animals and ask broader questions about major biological
transitions.
Case 2: Tunabot
2.2.
The second case study about tuna robotics presents the implementation of
robotics in the study of the morphology of recent organisms. Yellowfin
tuna are high-performance swimmers who often operate at high frequen-
cies, particularly when escaping predators or capturing their prey. Their
swimming is extremely efficient, and they can change their tempo between
moving quickly and moving relatively slowly. Although several fish-like
robots and autonomous underwater vehicles have been produced in the
past, these robots cannot achieve the performance level of tuna. This short-
coming was based on a lack of morphological understanding of tuna and
other scombrid fishes’ form-function complex. As biologists Dylan K.
Wainwright and Lauder put it, “in many cases, we lack a mechanistic
understanding of the functional morphology of swimming animals”
( Wainwright and Lauder 2020, p. 1). To understand how the form-
function arrangement of Tuna does work, Lauder’s team, together with
mechanical and aerospace engineer Hilary Bart-Smith’s team, decided to
use robotics-inspired procedures. Consequently, these scientists developed
a Tunabot, a robot that replicated a “simplified version of scombrid fish
morphology” (Zhu et al. 2019, p. 2). Like the OroBOT, the Tunabot
was also designed through a biomimetic process: its design “was inspired
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
654
The Material Turn
by computed tomography (CT) scans of yellowfin tuna (Thunnus albacares),
and the size of the platform is similar to adult-sized Atlantic mackerel
(Scomber scombrus) or young yellowfin tuna” (Zhu et al. 2019, p. 2). Here
again, the biomimetic principle was instrumental in the creation of a robot
that would enable the scientists to ask new biological questions. As they
put it,
whereas biology can inspire a high-performance robotic platform,
development of such a platform will also provide an opportunity to
experimentally study both high-speed swimming and the function of
features unique to high-performance fishes. Designing fish-inspired
platforms that are capable of high-performance swimming is
therefore crucial for expanding the capabilities of nontraditional
propulsors in both a utilitarian and a scientifically relevant way.
(Zhu et al. 2019, p. 1)
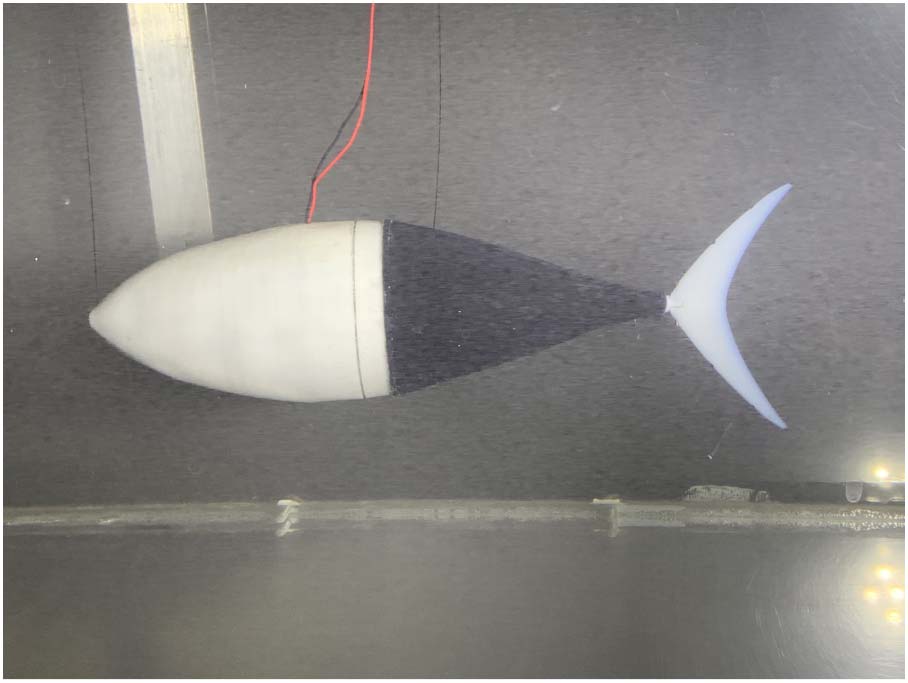
Tunabot’s external shape took inspiration from a “yellowfin tuna body with
all fins removed” (Zhu et al. 2019, p. 8), whereas the motor in the Tunabot’s
head was connected to the caudal fin via an actuating mechanism. Once
designed and 3D-printed (see Figure 3), the Tunabot’s velocity was measured.
The implementation of robots seems straightforward in disciplines
where experimentation in vivo is excluded on principle, such as when
the organisms are extinct, and therefore the rationale for using robots in
neontology is quite different. The justification for designing the Tunabot
was the conviction the form-function complex needed to be understood in
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Figure 3. Tunabot (Zhu et al. 2019). Credit: George Lauder.
Perspectives on Science
655
conjunction with the environment in which it operates. The control of how
form-function is possible only if its medium is considered in the morpho-
logical investigations. Lauder, in another programmatic paper, noted, “the
feedback loop between animal movement and the flow and force response
from the surrounding environment can lead to non-intuitive and novel
movement biomechanics that can be studied with robots” (Gravish and
Lauder 2018, p. 4). This interaction generates new questions and hypoth-
eses on animal locomotion. In the case of the Tunabot, for instance, the
goal was to come up with new questions and data for understanding the
biomechanical efficiency of open-ocean fish.
This investigation generated a productive loop between robotics and
biology. Lauder and Gravish announced that this approach, which involves
reciprocal illumination and experimentation between biology and mechan-
ical systems, highlights how close-knit robotic and biological experiments
can lead to a research feedback loop whereby robots can be used to generate
biological hypotheses. The end result of this intellectual feedback loop is
that roboticists expanded their control capabilities using wave modulation,
and biologists, in turn, were able to develop and test new control strategy
hypotheses for maneuvering [organisms] (Gravish and Lauder 2018, p. 5).
The construction of the Tunabot thus enabled scientists, step by step, to
control all the factors and elements that might have affected the form-
function complex.4
The Integrative Approach of Twenty-First Century
3.
Robotics-inspired Morphology
The employment of robotics in these two case studies is quite representa-
tive of the methodology of recent morphological research. First, in both
cases, robots were used to enable morphological investigations. They
allowed the scientists to come up with possible theories of locomotion
for both an extinct organism, the Orobates, and a high-performance fish,
the Yellowfin tuna. Therefore, they were not simply used to test possible
background hypotheses but rather as proper targets for their investiga-
tions. Due to the scarcity of data and the impossibility of obtaining direct
access to the phenomena under investigation, the robots, constrained
through a series of parameters obtained from other physical models (in
the case of Tunabot) or via a morphological study of related organisms (like
was done with the OroBot), became the morphological explanandum. As
bio-engineers Barbara Mazzolai and Cecilia Laschi observed, “bioinspired
4.
From the concepts used in the quotations presented in this paragraph, such as the
notion of feedback loop, the debt twenty-first century robotics-inspired morphology owes
to cybernetics is quite evident.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
656
The Material Turn
robots turn particularly useful whenever it is practically impossible to in-
vestigate a biological question (in a non-simulated way) by means of any
living organism” (Mazzolai and Laschi 2020, p. 1088). Robots are there-
fore understood as concrete objects that need to be built for understanding
something that is not otherwise accessible nor manipulable.
Hence, by studying morphology through the use of robots, biologists
are able to study the form-function complex in vivo, though through the
use of robots that biomimetically represents natural processes. By doing so,
besides playing the classical epistemic functions of testing hypotheses and
validating background theories,5 robots assume a further function. Philos-
opher Edoardo Datteri named it a prediction-oriented task. Within this
task, the robots’ “goal is to predict the behaviour of the living system
whose theoretical model is implemented in the robot” (Datteri 2020, p. 10).
Furthermore, “the behavior of the robotic system in particular circum-
stances is regarded as informative about the behavior that the target system
would display in similar circumstances” (Datteri 2020, p. 10). I agree with
Datteri; these devices are prediction oriented. To push this interpretation
further, I would also argue that in robotics-inspired biology, the devices
concretize a morphological scenario, the form-function complex, not reach-
able otherwise. This robotically given scenario is what biologists aim to
explore and control. The hybrid environment-robot-complex becomes
the target of the morphological investigations since it presents how form
and function work together in vivo. This is one of the main peculiarities of
twenty-first century robotics-inspired morphology: the possibility of ex-
perimenting with a not otherwise given explanandum. Therefore, I would
like to expand on Datteri’s definition of non-interactive robots, such as the
OroBOT and the Tunabot, to better define their function in morphological
investigations: “by observing how the robot behaves in controlled experi-
mental settings, one acquires new knowledge about the target system”
(Datteri 2020, p. 9), which is only accessible through robots’ design.6
This point has one main consequence. It stresses the pivotal role of bio-
mimicry in this set of morphological investigations. Biomimicry plays an
important role in the so-called interactive robots which interact with living
systems (see Datteri 2020) and robots that only marginally interact with
the environment like the OroBOT. The design of nature-inspired
5. As Datteri noted, this is the task of the so-called standard model in robotics: its
purpose “is to test a how-possibly theoretical model of the mechanism enabling a living
system to behave in a certain way. The model is implemented in the robot, and the behavior
of the robot is compared with the behavior of the target system in suitable experimental
settings” (Datteri 2020, p. 9).
6. This brings the discussion on the differences between robots and, broadly, models
in knowledge production. See, for instance, Datteri 2020.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Perspectives on Science
657
machinery is an essential step to make visible all the parameters that
influence form’s structure. Biomimicry offers the starting point for a deeper
study of morphogenetic dynamics.
The biomimicry principle behind robots’ design implied that the pro-
cess of morphogenesis should be applied to the development and design of
robots as well. That means that “in diverse ecological niches, such bioin-
spired robots would develop purposive morphologies and abilities for ne-
gotiating their environments” (Mazzolai and Laschi 2020). This is, in fact,
what bioengineer Mazzolai has recently called for. For instance, together
with her team, she developed a robotic device that grows from the tip,
as plant roots do. Through this addition of material, the robot is able to
move through different environments (see, for instance, Mazzolai et al.
2014; Mazzolai 2017; Sadeghi et al. 2017). Despite the strong biomimicry
aim of Mazzolai’s research, the robot could then be used to explore broader
biological phenomena such as, for instance, the notion of plasticity and the
relation between growth, development, and movement.
Robotics-inspired morphology has deep historical roots. These case
studies reveal something important about the origins of current robotics
based morphology and biology. The notion of organic form advocated
by the supporters of a robotics based morphology was deeply technical.
They meant organic form as the emergent arrangement of different factors,
which could be best understood as a construction. This remark is impor-
tant both historically and theoretically. It suggests another genealogy from
the Kantian-Romantic paradigm of morphology.7 This paradigm, which
put a premium on, among others, the notion of Gestalt and form’s intrinsic
proprieties, was taken up by the organicism movement during the twen-
tieth century. Recently, it has been used to frame the bio-inspired disci-
plines, such as biomimicry and bionics. Concisely put, the motto of the
supports of bionics and biomimicry is “form follows nature” (Tamborini
under review). As nature-inspired scientists, they also shared the idea that
nature proceeds technically in producing their forms. Unlike the former
group, the latter scientists are not interested in form’s intrinsic dynamics.
They aim at developing constructional analyses to discover how organisms’
parts can be harmonized into an ordered and versatile construction (as the
fourth approach to morphology described above emphasized). This is the
rationale that enables “map[ping] biological mechanism descriptions into
robotic mechanism descriptions” (Datteri and Tamburrini 2007), thus
biomimetically constructing robots. Therefore, robotics-inspired morphol-
ogists only marginally, if at all, underwrite the form-follows-nature
7.
For the romantic conception of machine, see Tresch 2012.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
658
The Material Turn
organicist motto. Rather, they support the fourth group of morphologists
discussed in the first section of this paper.
This different theoretical and historical root is clearly mirrored in Nyakatura
and colleagues’ methodology. They criticized the methods that had
previously been used to investigate Orobates’ morphology and locomotion.
These have analyzed the organism only from a restricted perspective. For
instance, the scientists reported that morphological studies have manly
focused on either the anatomical aspects or on the biomechanical features
of the Orobates. Furthermore, classical morphological analyses have looked
only at the trackways of extant organisms or have too easily connected form
and function without taking broader environmental factors into account.
Conversely, Nyakatura and colleagues pursued “an integrative approach that
combines the advantages of these different strategies to reconstruct the
locomotion of tetrapod fossils” (Nyakatura et al. 2019, p. 352). This is a
classical methodological choice proper of the supporters of the architectural
approach to form. Since the organic form is meant to be a construction, an
assembly of elements that are heaped together, the combination of historical
with structural, functional, and environmental elements is mandatory for
understanding the organizational properties of form. This was the essence
of Seilacher’s triangle.
Therefore, the second pillar of twenty-first century robotics-inspired
morphology is its integrative approach. In order to understand what organic
form is and how it changes through time, different datasets and approaches
should be brought together. Morphology became a collective effort not
reducible to one single discipline. This development, in turn, has a long
history and has shaped what I have called the twentieth-century desire for
morphology (Tamborini under contract).
Conclusion: The Material Turn in Morphology
This paper has called attention to the knowledge production mechanisms
of twenty-first century robotics-inspired morphology. This methodology,
even if in close relationship with other engineering-based approaches to
morphogenesis, differs from the nature-inspired program advocated by
biomimetics and other disciplines, for it designs robots to biologically
examine and directly experiment with morphogenetic processes. In other
words, nature inspired robotics is specular to robotics-inspired morphology.
Both share the idea of being able to technically control the phenomenon of
natural morphogenesis. With its origin in the same engineering or techno-
scientific vision of nature, robotics-inspired morphogenesis takes a step
forward. It sought not only technoscientific control of the development of
possible forms, but it deeply aspires to explain them.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Perspectives on Science
659
Second, by investigating how robotics-inspired morphology is con-
ducted, I am now able to call attention to what I would like to call a
material turn in the study of form.8 In the study of organic form a first
digital turn took place in two phases; first, during the 1960s and, second,
at the beginning of the twenty-first century. During the 1960s, paleontol-
ogist Dave Raup used computers to create and visualize a virtual space in
which, given certain physical parameters, all the possible theoretical shell
forms could be generated. This was a turning point in morphological
research since it entailed the possibility of visualizing and controlling
the dynamic morphogenesis (see, for example, Raup 1961, 1962, 1969;
Sepkoski 2012; Tamborini under contract, under review b).
Second, between the end of the twentieth and early twenty-first centuries,
the introduction of CT scanners, 3D images, and 3D prints fully digitalized
the morphological workflow. Forms could now be virtually manipulated
and simulated. Furthermore, morphospaces and computer simulations were
used to narrow down the morphological elements that may contribute to
shape changes. This brought morphology closer to other engineering and
technoscientific disciplines.
Today, we are witnessing a material turn. The simulated and digitalized
morphological data are used only as starting points for further technical elab-
orations. The process of morphogenesis needs to be studied in its own envi-
ronment to possibly master all the factors and variables responsible for
morphogenesis. In a simulated and virtual scenario, every variable that
co-participates in the form-function complex can be represented. For
instance, while many of the obvious features “of a live stimulus can be
adequately mimicked in computer animated images, other features, like
depth, motion, and texture, cannot be equivalently represented” (Spinello
et al. 2019, p. 2). Biologist Krause and colleagues commented extensively
on the limitations involved in experiments with 2D simulated animals.9
8.
I am not arguing here for a material turn in biology, only in morphology. For what
may be called a digital-material turn in biology, i.e., its computerization and the use of big
data in biology, see, for instance, Agar 2006, Garcia-Sancho 2012, Leonelli 2016, Sepkoski
2017, Sepkoski and Tamborini 2018, Strasser 2019, Tamborini 2020c.
9. Philosophers Edoardo Datteri and Guglielmo Tamburrini described the difference
between computer simulation and biorobots as follows: “biorobotic experimental prac-
tice does not give rise to the methodological problem of controlling whether behavioral
(dis-)similarities between target biological systems and computer-simulated agents take
their origin in ad hoc or inaccurate simulations of the environment. One should be careful
to note, however, that there is a methodological trade-off between computer simulation and
robotic implementation of mechanism schemata. Computer simulations are unaffected by
methodological problems arising in biorobotics on account of the fact that biorobots are
immersed in natural environments” (Datteri and Tamburrini 2007, p. 413; see also Datteri
and Schiaffonati 2019).
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
660
The Material Turn
Fish species can usually sense the presence of conspecifics through the
lateral line (via mechanical stimuli), and most species of social insects require
olfactory stimuli for social recognition. Computer visual simulations simply
do not exist in the third dimension. Animal interactions “require the phys-
ical presence of a con- or heterospecific to fight, mate or cooperate with and
these types of interaction, by their very nature, cannot be established with a
virtual partner and require a robot” (Krause et al. 2011, p. 370). This
material turn in morphology is marked by the coexistence of the robotic,
the virtual, and the real to understand the structures and dynamics of shape.
The physicality of the robot, its capacity to be immersed in real mediums, is
the essential epistemic feature of robotics-inspired morphology. This mate-
riality makes robots worth actually making.10
Hence, and to conclude, what will be the identifying feature of twenty-
first century robotics-inspired morphology? By using robots as targets for
their investigations, these analyses made clear the passage from bio-
robotics, or nature inspired robotics, to robotics-inspired biology. This
transition implies a bridging of the gap between technology and nature.
Shape changes should now be studied through in vivo investigations (such
as the classical anatomical dissection of Tuna), in silico (as, for example,
through CT scanners or computer simulations), and eventually again in
a hybrid and highly integrated in vivo-silico-robotic environment. The full
integration of these methodological layers would help illustrate the elements’
structural interplay that characterizes shape change.
References
Agar, Jon. 2006. “What Difference Did Computers Make?” Social Studies of
Science 36(6): 869–907. https://doi.org/10.1177/0306312706073450
Baedke, Jan. 2019. “O Organism, Where Art Thou? Old and New
Challenges for Organism-Centered Biology.” Journal of the History of
Biology 52(2): 293–324. https://doi.org/10.1007/s10739-018-9549-4,
PubMed: 30465299
10. This recent shift is reminiscent of the use of automata during the eighteenth cen-
tury. As historian Jessica Risikin argued, both the late eighteenth and twentieth centuries
were time periods in which machines were used to analogically explain organisms, as well
as to simulate them. This, Riskin argued, implied that machines were used as “an exper-
imental model from which one can discover properties of the natural subject” as their coun-
terparts in the twenty-first century (Riskin 2003, p. 98; see also Riskin 2016). The
difference between the simulation of organisms pointed out by Riskin and the material
turn in morphology I have revealed is that the latter, unlike the former, implies a contin-
uum between the digital, the robotic, and the real. Through feedback loops, both co-
participate in the making of the morphological explanandum.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Perspectives on Science
661
Bowler, Peter J. 1996. Life’s Splendid Drama: Evolutionary Biology and the
Reconstruction of Life’s Ancestry, 1860–1940. Chicago/ London: The
University of Chicago Press.
Cordeschi, Roberto. 2002. The Discovery of the Artificial: Behavior, Mind and
Machines Before and Beyond Cybernetics, Vol. 28. Seacaucus, NJ: Springer
Science & Business Media. https://doi.org/10.1007/978-94-015-9870-5
Currie, Adrian. 2019. “Paleobiology and Philosophy.” Biology & Philosophy
34(2): 31. https://doi.org/10.1007/s10539-019-9682-2
Datteri, Edoardo. 2020. “Interactive Biorobotics.” Synthese: 1–19. https://
rdcu.be/coirV (accessed 13 July 2021).
Datteri, Edoardo, and Viola Schiaffonati. 2019. “Robotic Simulations,
Simulations of Robots.” Minds and Machines 29(1): 109–125. https://
doi.org/10.1007/s11023-019-09490-x
Datteri, Edoardo, and Guglielmo Tamburrini. 2007. “Biorobotic Experi-
ments for the Discovery of Biological Mechanisms.” Philosophy of Science
74(3): 409–430. https://doi.org/10.1086/522095
Depew, Michael J., and Carol A. Simpson. 2006. “21st Century Neontology and
the Comparative Development of the Vertebrate Skull.” Developmental
Dynamics: An Official Publication of the American Association of Anatomists 235(5):
1256–1291. https://doi.org/10.1002/dvdy.20796, PubMed: 16598716
Driesch, Hans. 1892. “Entwicklungsmechanische Studien. I. Der Werth der
beiden ersten Furchungszellen. Experimentelle Erzeugung von Theil- und
Doppelbildungen.” Zeitschrift für wissenschaftliche Zoologie 53: 160–178.
Driesch, Hans. 1898. “Die Lokalisation morphogenetischer Vorgänge. Ein
Beweis vitalistischen Geschehens.” Archiv für Entwicklungsmechanik der
Organismen 8: 35–111. https://doi.org/10.1007/BF02153032
Driesch, Hans. 1919. Der Begriff der organischen Form. Berlin: Borntrager.
Floridi, L. 2008. The Blackwell Guide to the Philosophy of Computing and
Information. Hoboken, NJ: John Wiley & Sons.
Garcia-Sancho, Miguel. 2012. Biology, Computing, and the History of
Molecular Sequencing: From Proteins to DNA, 1945–2000. Heidelberg:
Springer. https://doi.org/10.1057/9780230370937
Gould, Stephen Jay. 1980. “The Promise of Paleontology as a Nomothetic,
Evolutionary Discipline.” Paleobiology 6(1): 96–118. https://doi.org/10
.1017/S0094837300012537
Gravish, Nick, and George V. Lauder. 2018. “Robotics-Inspired Biology.”
Journal of Experimental Biology 221(7): 1–8. https://journals.biologists.com
/jeb/article/221/7/jeb138438/20660/Robotics-inspired-biology. https://
doi.org/10.1242/jeb.138438
Haraway, Donna J. 1976. Crystals, Fabrics, and Fields: Metaphors of Organ-
icism in Twentieth-Century Developmental Biology. New Haven, CT: Yale
University Press.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
662
The Material Turn
Jennings, Herbert Spencer. 1910. “Diverse Ideals and Divergent Conclu-
sions in the Study of Behavior in Lower Organisms.” American Journal of
Psychology 21: 349–370. https://doi.org/10.2307/1413346
Krause, Jens, Alan F. T. Winfield, and Jean-Louis Deneubourg. 2011.
“Interactive Robots in Experimental Biology.” Trends in Ecology & Evolution
26(7): 369–375. https://doi.org/10.1016/j.tree.2011.03.015, PubMed:
21496942
Lacerda, F., M. Lima-Marques, and A. Resmini. 2019. An Information
Architecture Framework for the Internet of Things. Philosophy & Technology
32: 727–744. https://doi.org/10.1007/s13347-018-0332-4
Leonelli, Sabina. 2016. Data-Centric Biology: A Philosophical Study. Chicago:
University of Chicago Press. https://doi.org/10.7208/chicago
/9780226416502.001.0001
Liggieri, K., and O. Müller. 2019. Mensch-Maschine-Interaktion. Geschichte–
Kultur–Ethik. Metzler-Handbuch. Stuttgart/Weimar. https://doi.org
/10.1007/978-3-476-05604-7
Loeb, Jacques. 1906. The Dynamics of Living Matter, Vol. 8. New York:
Columbia University Press.
Love, A. 2003. Evolutionary Morphology, Innovation, and the Synthesis of
Evolutionary and Developmental Biology. Biology and Philosophy 18:
309–345. https://doi.org/10.1023/A:1023940220348
Love, A. (2006). Evolutionary Morphology and Evo-Devo: Hierarchy and
Novelty. Theory in Biosciences 124: 317–333. https://doi.org/10.1016/j
.thbio.2005.11.006, PubMed: 17046363
Mayr, Ernst. 1980. “Morphology.” P. 173 in The Evolutionary Synthesis:
Perspectives on the Unification of Biology. Edited by Ernst Mayr and William
B. Provine. Cambridge, Mass.: Harvard University Press. https://doi.org
/10.4159/harvard.9780674865389.c25
Mayr, Ernst. 1982. The Growth of Biological Thought. Cambridge: Belknap
Press.
Mazzolai, Barbara. 2017. “Plant-Inspired Growing Robots.” Pp. 57–63 in
Soft Robotics: Trends, Applications and Challenges: Proceedings of the Soft
Robotics Week, April 25–30, 2016, Livorno, Italy. Edited by C. Laschi,
J. Rossiter, F. Iida, M. Cianchetti, and L. Margheri. New York: Springer
International. https://doi.org/10.1007/978-3-319-46460-2_8
Mazzolai, Barbara, Lucia Beccai, and Virgilio Mattoli. 2014. “Plants as
Model in Biomimetics and Biorobotics: New Perspectives.” Frontiers
in Bioengineering and Biotechnology 2: 2. https://www.frontiersin.org
/articles/10.3389/fbioe.2014.00002/full (accessed 13 July 2021).
https://doi.org/10.3389/fbioe.2014.00002, PubMed: 25152878
Mazzolai, Barbara, and Cecilia Laschi. 2020. “AVision for Future Bioinspired
and Biohybrid Robots.” Science Robotics 5(38): eaba6893. https://robotics
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Perspectives on Science
663
.sciencemag.org/content/5/38/eaba6893 (accessed 13 July 2021). https://
doi.org/10.1126/scirobotics.aba6893, PubMed: 33022592
Müller, O. (2020). “‘An Eye Turned into a Weapon’: A Philosophical
Investigation of Remote Controlled, Automated, and Autonomous
Drone Warfare.” Philosophy & Technology, 1–22. https://link.springer
.com/article/10.1007/s13347-020-00440-5. https://doi.org/10.1007
/s13347-020-00440-5
Nyakatura, John A, Kamilo Melo, Tomislav Horvat, Kostas Karakasiliotis,
Vivian R. Allen, Amir Andikfar, Emanuel Andrada, Patrick Arnold,
Jonas Lauströer, John R. Hutchinson, Martin S. Fischer, and Auke J.
Ijspeert. 2019. “Reverse-Engineering the Locomotion of a Stem
Amniote.” Nature 565(7739): 351. https://doi.org/10.1038/s41586
-018-0851-2, PubMed: 30651613
Petersen, Hans. 1922. “Skelettprobleme.” Naturwissenschaften 10(15):
337–344. https://doi.org/10.1007/BF01571159
Peterson, Erik. 2016. The Life Organic: The Theoretical Biology Club and the
Roots of Epigenetics. Pittsburgh: University of Pittsburgh Press.
Pfeifer, Rolf, Max Lungarella, and Fumiya Iida. 2007. “Self-Organization,
Embodiment, and Biologically Inspired Robotics.” Science 318(5853):
1088–1093. https://doi.org/10.1126/science.1145803, PubMed:
18006736
Raup, David M. 1961. “The Geometry of Coiling in Gastropods.” Proceedings
of the National Academy of Sciences 47(4): 602–609. https://doi.org/10
.1073/pnas.47.4.602, PubMed: 16578506
Raup, David M. 1962. “Computer as Aid in Describing Form in Gastropod
Shells.” Science 138(3537): 150–152. https://doi.org/10.1126/science
.138.3537.150, PubMed: 17818401
Raup, David M. 1969. “Computer as a Research Tool in Paleontology.” In
Computer Applications in the Earth Sciences: An International Symposium,
edited by F. Merriam Daniel. New York: Plenum Press. https://doi.org
/10.1007/978-1-4615-8633-3_12
Riskin, Jessica. 2003. “Eighteenth-Century Wetware.” Representations 83(1):
97–125. https://doi.org/10.1525/rep.2003.83.1.97
Riskin, Jessica. 2016. The Restless Clock: A History of the Centuries-Long Argument
over What Makes Living Things Tick. Chicago: University of Chicago Press.
Rudwick, Martin. 1964. “The Inference of Function from Structure in
Fossils.” The British Journal for the Philosophy of Science 15(57): 27–40.
https://doi.org/10.1093/bjps/XV.57.27
Ryczko, Dimitri, András Simon, and Auke Jan Ijspeert. 2020. “Walking
with Salamanders: From Molecules to Biorobotics.” Trends in Neurosci-
ences 43(11): 916–930. https://doi.org/10.1016/j.tins.2020.08.006,
PubMed: 33010947
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
664
The Material Turn
Sadeghi, Ali, Alessio Mondini, and Barbara Mazzolai. 2017. “Toward Self-
Growing Soft Robots Inspired by Plant Roots and Based on Additive
Manufacturing Technologies.” Soft Robotics 4(3): 211–223. https://doi
.org/10.1089/soro.2016.0080, PubMed: 29062628
Seilacher, Adolf. 1951. “Der Röhrenbau von Lanice conchilega (Polychaeta):
ein Beitrag zur Deutung fossiler Lebensspuren.” Senckenbergiana
Maritima: wissenschaftliche Mitteilungen der Senckenbergischen naturforschenden
Gesellschaft (1–4).
Seilacher, Adolf. 1970. “Arbeitskonzept zur Konstruktions-Morphologie.”
Lethaia 3: 393–396. https://doi.org/10.1111/j.1502-3931.1970.tb00830.x
Sepkoski, David. 2012. Rereading the Fossil Record: The Growth of Paleobiology
as an Evolutionary Discipline. Chicago: The University of Chicago Press.
https://doi.org/10.7208/chicago/9780226748580.001.0001
Sepkoski, David. 2017. “The Database before the Computer?” Osiris 32(1):
175–201. https://doi.org/10.1086/693991
Sepkoski, David, and Marco Tamborini. 2018. “‘An Image of Science’:
Cameralism, Statistics, and the Visual Language of Natural History in
the Nineteenth Century.” Historical Studies in the Natural Sciences 48(1):
56–109. https://doi.org/10.1525/HSNS.2018.48.1.56
Spinello, Chiara, Yanpeng Yang, Simone Macrì, and Maurizio Porfiri.
2019. “Zebrafish Adjust Their Behavior in Response to an Interactive
Robotic Predator.” Frontiers in Robotics and AI 6: 38. https://doi.org/10
.3389/frobt.2019.00038
Strasser, Bruno J. 2019. Collecting Experiments: Making Big Data Biology.
Chicago: University of Chicago Press. https://doi.org/10.7208/chicago
/9780226635187.001.0001
Tamborini, Marco. 2020a. “Challenging the Adaptationist Paradigm:
Morphogenesis, Constraints, and Constructions.” Journal of the History of
Biology 53(2): 269–294. https://doi.org/10.1007/s10739-020-09604-7,
PubMed: 32399744
Tamborini, Marco. 2020b. “Technische Form und Konstruktion.” Deutsche
Zeitschrift für Philosophie 68(5): 705–711. https://doi.org/10.1515/dzph
-2020-0049
Tamborini, Marco. 2020c. “Technoscientific Approaches to Deep Time.”
Studies in History and Philosophy of Science Part A 79(1): 57–67. https://
doi.org/10.1016/j.shpsa.2019.03.002
Tamborini, Marco. 2020d. “The Twentieth-Century Desire for Morphology.”
Journal of the History of Biology 53(2): 211–216. https://doi.org/10.1007
/s10739-020-09605-6, PubMed: 32399745
Tamborini, Marco. under contract. The Architecture of Evolution: The Science of
Form in Twentieth-Century Evolutionary Biology. Pittsburgh: University of
Pittsburgh Press.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Perspectives on Science
665
Tamborini, Marco. Under review. “The Circulation of Morphological
Knowledge: Understanding ‘Form’ across Disciplines in the Twentieth
and Twenty-First Centuries.”
Tamborini, Marco. Under review b. “What Difference Did Technology
Make to Morphology? The Case of the Electron Microscope during
the 1950s and 1950s.”
Tresch, John. 2012. The Romantic Machine: Utopian Science and Technology
after Napoleon. Chicago: University of Chicago Press. https://doi.org
/10.7208/chicago/9780226812229.001.0001
Turner, Derek. 2007. Making Prehistory. Historical Science and the Scientific Realism
Debate, Cambridge Studies in Philosophy and Biology. Cambridge: Cambridge
University Press. https://doi.org/10.1017/CBO9780511487385
Wainwright, Dylan K, and George V. Lauder. 2020. “Tunas as a High-
Performance Fish Platform for Inspiring the Next Generation of
Autonomous Underwater Vehicles.” Bioinspiration & Biomimetics 15(3):
035007. https://doi.org/10.1088/1748-3190/ab75f7, PubMed:
32053798
Wainwright, Stephen A., W. D. Biggs, and John D. Currey. 1976. Me-
chanical Design in Organisms. London: Edward Arnold.
Wong, Kate. 2019. “RoboFossil Reveals Locomotion of Beast from Deep
Time.” https://www.scientificamerican.com/article/robofossil-reveals
-locomotion-of-beast-from-deep-time/ (accessed 13.08.2020)
Zhu, Joseph, Carl White, Dylan K. Wainwright, Valentina Di Santo,
George V. Lauder, and Hilary Bart-Smith. 2019. “Tuna Robotics: A
High-Frequency Experimental Platform Exploring the Performance
Space of Swimming Fishes.” Science Robotics 4(34): 4615. https://doi
.org/10.1126/scirobotics.aax4615, PubMed: 33137777
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
/
e
d
u
p
o
s
c
/
a
r
t
i
c
e
–
p
d
l
f
/
/
/
/
2
9
5
6
4
3
1
9
6
4
2
5
3
p
o
s
c
_
a
_
0
0
3
8
8
p
d
.
/
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3