Helpful Neighbors:
Leveraging Neighbors in Geographic Feature Pronunciation
Llion Jones† Richard Sproat† Haruko Ishikawa† Alexander Gutkin‡
†Google Japan
‡Google UK
{llion,rws,ishikawa,agutkin}@google.com
Abstrakt
If one sees the place name Houston Mer-
cer Dog Run in New York, how does one
know how to pronounce it? Assuming one
knows that Houston in New York is pro-
nounced
and not like the Texas
), then one can probably guess
city (
Das
is also used in the name of the
dog park. We present a novel architecture that
learns to use the pronunciations of neighbor-
ing names in order to guess the pronunciation
of a given target feature. Applied to Japanese
place names, we demonstrate the utility of
the model to finding and proposing correc-
tions for errors in Google Maps.
To demonstrate the utility of this approach to
structurally similar problems, we also report
on an application to a totally different task:
Cognate reflex prediction in comparative his-
torical linguistics. A version of the code has
been open-sourced.1
1
Einführung
In many parts of the world, pronunciation of
toponyms and establishments can require local
Wissen. Many visitors to New York, zum Beispiel-
reichlich, get tripped up by Houston Street, welche
they assume is pronounced the same as the city
in Texas. If they do not know how to pronounce
Houston Street, they would likely also not know
how to pronounce the nearby Houston Mercer
Dog Run. But if some one knows one, that can
(usually) be used as a clue to how to pronounce
the other.
Before we proceed further, a bit of terminol-
Ogy. Technically, the term toponym refers to the
name of a geographical or administrative feature,
such as a river, lake, Stadt, or state. In most of
what follows, we will use the term feature to refer
to these and other entities such as roads, build-
ings, Schulen, und so weiter. In practice we will
1https://github.com/google-research/google
-research/tree/master/cognate inpaint neighbors.
85
not make a major distinction between the two,
but since there is a sense in which toponyms are
more basic, and the names of the more general
features are often derived from a toponym (as in
the Houston Mercer Dog Run example above),
we will retain the distinction where it is needed.
While features cause not infrequent problems
in the US, they become a truly serious issue in
Japan. Japan is notorious for having toponyms
whose pronunciation is so unexpected that even
native speakers may not know how to pronounce
a given case. Most toponyms in Japanese are writ-
ten in kanji (Chinese characters) with a possible
intermixing of one of the two syllabaries, hira-
Ueno is entirely in
gana or katakana. Daher
Tora no mon has two kanji and
kanji;
one katakana symbol (der Zweite); Und
Fukiwari Waterfalls has three kanji and one hira-
gana symbol (der dritte). Features more generally
tend to have more characters in one of the syl-
labaries—especially katakana if, Zum Beispiel, Die
feature is a building that includes the name of a
company as part of its name.
The syllabaries are basically phonemic scripts
so there is generally no ambiguity in how to pro-
nounce those portions of names, but kanji present a
serious problem in that the pronunciation of a kanji
string in a toponym is frequently something one
Ueno
just has to know. To take the example
über, that pronunciation (for the well-known area
in Tokyo) is indeed the most common one, Aber
there are places in Japan with the same spelling
but with pronunciations such as Uwano, Kamino,
Wano, among others.2 It is well-known that many
kanji have both a native (kun) Japanese pronunci-
yama ‘mountain’) as well as one or
ation (z.B.,
more Chinese-derived on pronunciations (z.B.,
san ‘mountain’), but the issue with toponyms goes
2Different pronunciations of kanji are often referred to
as readings, but in this paper we will use the more general
term pronunciation.
Transactions of the Association for Computational Linguistics, Bd. 11, S. 85–101, 2023. https://doi.org/10.1162/tacl a 00535
Action Editor: Karen Livescu. Submission batch: 6/2022; Revision batch: 9/2022; Published 1/2023.
C(cid:2) 2023 Verein für Computerlinguistik. Distributed under a CC-BY 4.0 Lizenz.
l
D
Ö
w
N
Ö
A
D
e
D
F
R
Ö
M
H
T
T
P
:
/
/
D
ich
R
e
C
T
.
M
ich
T
.
e
D
u
/
T
A
C
l
/
l
A
R
T
ich
C
e
–
P
D
F
/
D
Ö
ich
/
.
1
0
1
1
6
2
/
T
l
A
C
_
A
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
T
l
A
C
_
A
_
0
0
5
3
5
P
D
.
F
B
j
G
u
e
S
T
T
Ö
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
well beyond this since there are nanori pronun-
ciations of kanji that are only found in names
also has the nanori pro-
(Ogihara, 2021):
nunciation taka, Zum Beispiel. The kun-on-nanori
variants relate to an important property of how
kanji are used in Japanese: Among all modern
writing systems, the Japanese use of kanji comes
closest to being semasiographic—that is, repre-
senting meaning rather than specific morphemes.
The common toponym component kawa ‘river’,
,
is usually written
which also means ‘river’. That kanji in turn has
other pronunciations, such as k¯o, a Sino-Japanese
word for ‘river’. This freedom to spell words with
a range of kanji that have the same meaning, oder
to read kanji with any of a number of morphemes
having the same meaning, is a particular char-
acteristic of Japanese. Daher, while reading place
names can be tricky in many parts of the world,
the problem is particularly acute in Japan.
, but can also be written as
Since the variation is largely unpredictable,
one therefore simply needs to know for a given
toponym what the pronunciation is. But once one
Ist
knows, zum Beispiel, that a name written
read as Uwano, as with the Houston case, eins
ought to be able to deduce that in the name of the
‘Uwano First Public Park’, Das
local
is read as Uwano and not Ueno. If one’s digital
assistant is reading this name to you, or needs
to understand your pronunciation of the name, Es
needs to know the correct pronunciation. Während
one might expect a complete and correct maps
database to have all of this information correctly
entered, in practice maps data contain many errors,
especially for less frequently accessed features.
In this paper we propose a model that learns to
use information from the geographical context to
guide the pronunciation of features. We demon-
strate its application to detecting and correcting
errors in Google Maps. Zusätzlich, in Section 8
we show that the model can be applied to a differ-
ent but structurally similar problem, nämlich, Die
problem of cognate reflex prediction in compara-
tive historical linguistics. In this case the ‘neigh-
bors’ are related word forms in a set of languages
from a given language family, and the pronuncia-
tion to be predicted is the corresponding form in a
language from the same family.
2 Hintergrund
Pronouncing written geographical feature names
involves a combination of text normalization (Wenn
the names contain expressions such as numbers
or abbreviations), and word pronunciation, von-
ten termed ‘‘grapheme-to-phoneme conversion’’.
Both of these are typically cast as sequence-
to-sequence problems, and neural approaches to
both are now common. Neural approaches to
grapheme-to-phoneme conversion is used by some
researchers (Yao and Zweig, 2015; Rao et al.,
2015; Toshniwal and Livescu, 2016; Peters et al.,
2017; Yolchuyeva et al., 2019), and others use a
text normalization approach (Sproat and Jaitly,
2017; Zhang et al., 2019; Yolchuyeva et al., 2018;
Pramanik and Hussain, 2019; Mansfield et al.,
2019; Kawamura et al., 2020; Tran and Bui,
2021). For languages that use the Chinese script,
grapheme-to-phoneme conversion may benefit
from the fact that Chinese characters can mostly
be decomposed into a component that relates to the
meaning of the character and another that relates
to the pronunciation. The latter information is po-
tentially useful, in particular in Chinese and in the
Sino-Japanese readings of characters in Japanese.
Recent neural models that have taken advantage
of this include Dai and Cai (2017) and Nguyen
et al. (2020). Andererseits, it should be
pointed out that other more ‘brute force’ decom-
positions of characters seem to be useful. Daher
Yu et al. (2020) propose a byte decomposition
für (UTF-8) character encodings for a model that
covers a wide variety of languages, einschließlich
Chinese and Japanese.
The above approaches generally treat the prob-
lem in isolation in the sense that the problem is
cast as one where the task is to predict a pronun-
ciation independent of context. Different pronun-
ciations for the same string in different linguistic
contexts comes under the rubric of homograph
disambiguation, and there is a long tradition
of work in this area; for an early example see
Yarowsky (1996) and for a recent incarnation see
Gorman et al. (2018). Nicht überraschend, there has
been recent interest in neural models for predict-
ing homograph pronunciations: See Park and Lee
(2020) and Shi et al. (2021) for recent examples
focused on Mandarin.
The present task is different, since what disam-
biguates the possible pronunciations of Japanese
features is not generally linguistic, but geograph-
ical context, which can be thought of as a way of
biasing the decision as to which pronunciation to
use, given evidence from the local context. Unser
approach is similar in spirit to that of Pundak et al.
86
l
D
Ö
w
N
Ö
A
D
e
D
F
R
Ö
M
H
T
T
P
:
/
/
D
ich
R
e
C
T
.
M
ich
T
.
e
D
u
/
T
A
C
l
/
l
A
R
T
ich
C
e
–
P
D
F
/
D
Ö
ich
/
.
1
0
1
1
6
2
/
T
l
A
C
_
A
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
T
l
A
C
_
A
_
0
0
5
3
5
P
D
.
F
B
j
G
u
e
S
T
T
Ö
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
calized pronunciations for text-to-speech, sowie
as search suggestions, it is important that it be
correct.
We started by extracting from the database all
features that include a broad (but not exhaustive)
set of feature types from a bounding box that
covers the four main islands of Japan. We then ex-
tracted feature summaries for names that included
both kanji original names, and katakana rendi-
tionen. These summaries include the feature name,
the hiragana version of the name converted from
katakana, and the bounding box for the feature.
We then find, for each feature in the feature sum-
maries, a bucket of other features that are within
a given radius (10 kilometers in our experiments).
Dann, for each feature in each bucket, we desig-
nate that feature a target feature, and we build
neighborhoods around that feature. We attempt
for each feature, to find interesting neighboring
features whose name shares a kanji bigram with
the target feature’s name. The intuition here is that
a feature that is likely to be useful in determining
the pronunciation of another feature should be
nearby geographically, and should share at least
some of the name. In any case we cap the num-
ber of ‘non-interesting’ neighbors to a limit—5
in our experiments. This means that some neigh-
borhoods will have target features that lack useful
neighbors; this is a realistic situation in that while
it is often the case that one can find hints for
a name’s pronunciation in the immediate neigh-
Bors, it is not always the case. While such neigh-
borhoods are not useful from the point of view
of neighbor-based evidence for a target feature’s
pronunciation, they still provide useful data for
training the target sequence-to-sequence model.
Our final dataset consists of about 2.7M fea-
ture neighborhoods,
including the information
from the summary for each target feature as de-
scribed above, the associated neighboring fea-
tures and their summaries, along with the distance
(in kilometers) from the target feature. Figur 2
shows parts of one such neighborhood.
4 Modell
Despite the differences noted above, the prob-
lem we are interested in can still be characterized
at its core as a sequence-to-sequence problem.
The input is a sequence of tokens representing
the feature name in its original Japanese writ-
ten form. The output is a sequence of hiragana
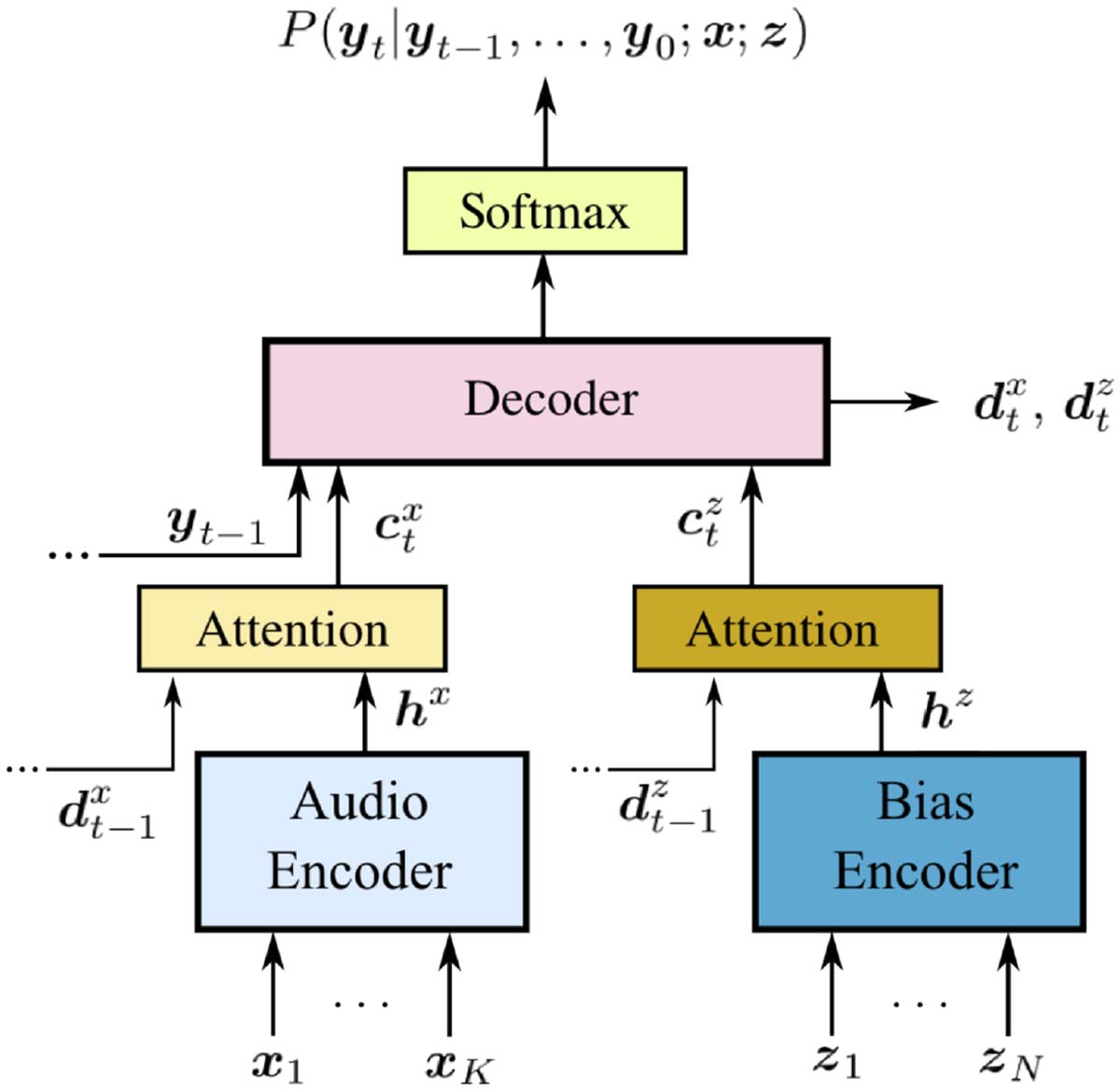
Figur 1: The biasing LAS model from Pundak et al.
(2018), Figure 1a.
(2018), who propose the use of a bias-encoder in
a ‘‘listen-attend-and-spell’’ (Chan et al., 2016)
Automatic Speech Recognition architecture. Der
bias encoder takes a set of ‘‘bias phrases’’, welche
can be used to guide the model towards a par-
ticular decoding. Pundak et al.’s (2018) model is
shown schematically in Figure 1.
3 Data
Features in Google Maps are stored in a data
representation that includes a variety of informa-
tion about each feature including: its location as
a bounding box in latitude-longitude; the type of
the feature—street, building, municipality, topo-
graphic feature, und so weiter; name(S) of the feature
in the native language as well as in many (meistens
automatically generated) transliterations; an ad-
dress if there is an address associated with this
feature; road signs that may be associated; Und
so forth. Each feature is identified with a unique
hexadecimal feature id. Features may have ad-
ditional names besides the primary names. Für
example in English, street names are often ab-
breviated (Main St.) and these abbreviations are
typically expanded (Main Street) as an additional
name. Many Japanese features have pronuncia-
tions of the names added as additional names in
katakana. Some of these have been carefully hand
curated, but many were generated automatically
and are therefore potentially errorful, as we will
sehen. Since the katakana version is used as the
basis for transliterations into other languages, lo-
87
l
D
Ö
w
N
Ö
A
D
e
D
F
R
Ö
M
H
T
T
P
:
/
/
D
ich
R
e
C
T
.
M
ich
T
.
e
D
u
/
T
A
C
l
/
l
A
R
T
ich
C
e
–
P
D
F
/
D
Ö
ich
/
.
1
0
1
1
6
2
/
T
l
A
C
_
A
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
T
l
A
C
_
A
_
0
0
5
3
5
P
D
.
F
B
j
G
u
e
S
T
T
Ö
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
dings are then shared between the feature names
and the pronunciations. Das ist, the same embed-
dings are used for the input name tokens and the
neighbor tokens, and similarly between the tar-
get pronunciation (decoder output) and the neigh-
bors’ pronunciations:
embinp = Embedname(xinp),
embname = Embedname(xname),
embpron = Embedpron(xpron).
These embedded tokens are then processed sep-
arately by the neighbor encoder. No parameters
are shared between these encoders, or with the
decoder:
hinp = Encoderinp(embinp),
hname = Encodername(embname),
hpron = Encoderpron(embpron).
Since each example has nneigh neighbors,
hinp is of shape [inp size, emb size] Aber
the processed neighbor spelling and pronuncia-
tion inputs are of size [nneigh, name len,
emb size] Und [nneigh, pron len,
emb size].
One of the simplest ways to incorporate the
neighboring information is to concatenate the fea-
ture names and pronunciation embeddings into
the main input sequence, allowing the transformer
to attend directly to all the relevant information.
Bedauerlicherweise, this is not possible with a vanilla
transformer with a quadratic attention mechanism
if we want to attend to, sagen, 30 neighbors. In
our experiments name_len is set to 20 Und
pron_len is set to 40, yielding (20+ 40) × 30 =
1800 input tokens, far too many for a vanilla
transformer decoder to attend to. To mitigate
against this we average the encoder outputs to
give a single vector per neighbor to attend to:
sname = Ave(hname) ,
spron = Ave(hpron) ,
c = Concat(hinp, sname, spron).
The vectors are concatenated along the neigh-
bor dimension to give a sequence of size
[inp len+2*nneigh, emb size]. Option-
ally, if embeddings representing the latitudinal
and longitudinal position of the feature (welche
we refer to as Lat-Long embeddings, discussed
später) are used then these are also concatenated
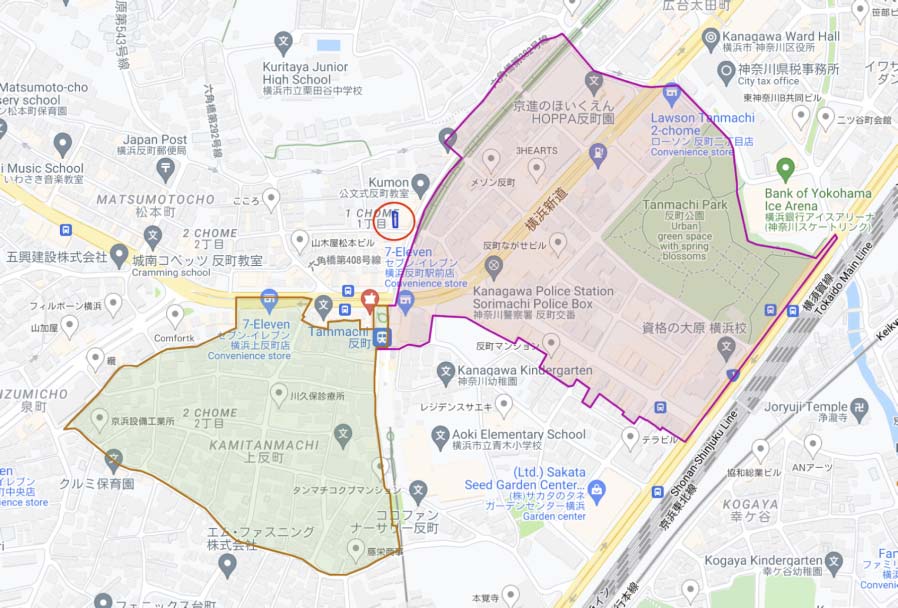
Figur 2: A small example of a neighborhood. Der
store, circled on the map, has a pronunciation listed as
C’est la Vie Sorimachi, but the neighboring areas are
Tanmachi and Kamitanmachi. Sorimachi is therefore
wrong.
characters representing the correct pronunciation.
The difference between this and a more con-
ventional sequence-to-sequence problem is that
we provide additional biasing information in the
form of geographical neighbors, such as their
pronunciation and geographical
location. Das
neighbor information is provided as additional
input sequences to aid the model in making its
prediction. In our experiments, we limit the num-
ber of neighbors to at most 30 (it is usually much
less than this), each consisting of two sequences,
nämlich, the neighbor’s name and the correspond-
ing pronunciation.
4.1 Model Architecture
Due to many recent successes in other NLP appli-
Kationen, we experiment with a transformer model
(Vaswani et al., 2017). Our transformer model
(Figur 3) uses a standard encoder-decoder ar-
chitecture as the backbone. The inputs to the
model are the input name with unknown pronun-
ciation xinp, the neighbor names xname (of length
name_len) and associated pronunciations xpron
(of length pron_len). Erste, these input tokens
are embedded with size emb_size. The embed-
88
l
D
Ö
w
N
Ö
A
D
e
D
F
R
Ö
M
H
T
T
P
:
/
/
D
ich
R
e
C
T
.
M
ich
T
.
e
D
u
/
T
A
C
l
/
l
A
R
T
ich
C
e
–
P
D
F
/
D
Ö
ich
/
.
1
0
1
1
6
2
/
T
l
A
C
_
A
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
T
l
A
C
_
A
_
0
0
5
3
5
P
D
.
F
B
j
G
u
e
S
T
T
Ö
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
l
D
Ö
w
N
Ö
A
D
e
D
F
R
Ö
M
H
T
T
P
:
/
/
D
ich
R
e
C
T
.
M
ich
T
.
e
D
u
/
T
A
C
l
/
l
A
R
T
ich
C
e
–
P
D
F
/
D
Ö
ich
/
.
1
0
1
1
6
2
/
T
l
A
C
_
A
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
T
l
A
C
_
A
_
0
0
5
3
5
P
D
.
F
B
j
G
u
e
S
T
T
Ö
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
Figur 3: The transformer model, showing how the main feature and neighbor features are encoded. Colors
for the embeddings and encoders reflect the shared parameters for the transformer model. Example shown is
nipponbashi
mezon nipponbashi, and some neighboring features
nipponbashi,
nishi, Und
nipponbashi higashi.
Hier. This input sequence is then concatenated
to the encoder output and is attended over by
the transformer decoder. There are no positional
embeddings added to this sequence, so they are
unordered from the point of view of decoder at-
Aufmerksamkeit. daher, we help the decoder match the
neighbor names to their corresponding neighbor
pronunciation by adding source tokens (Johnson
et al., 2017) to the sequence. The same source
token is added to matching names and pronun-
ciation inputs. The specific hyperparameters used
the transformer stacks are shown in
for all
Tisch 1.3
To combat overfitting, several types of dropout
were employed. As in Vaswani et al. (2017) Wir
use input-dropout, where entire input embeddings
can be dropped. We further use ReLU-dropout,
3Most feature names can be covered by 3,000 Figuren
(Sat¯o, 1985), so an input vocabulary of 4,710 kanji and other
characters is a reasonable size for an industrial-scale maps
database.
89
Beam Search Size:
Number of layers:
# attention heads:
Token embedding size:
Hidden size:
Dropout:
Label smoothing:
Lat-Long grid size:
Input vocab size:
Output vocab size:
8
4
8
256
256
0.1
0.2
100
4,710
427
Tisch 1: Hyperparameters for transformer stacks.
dropping activations in the feed-forward layer af-
ter applying the ReLU non-linearity. Endlich, Wir
use attention-dropout, which is applied to the out-
put of the attention layers. Zusätzlich, dropout
is applied to the auxiliary neighbor information,
which means that a given neighbor’s name or pro-
nunciation, as well as the Lat-Long embedding,
has a 10% chance of being dropped entirely in a
training example. The model can be configured to
use neighbor information or not. We show below
that the model benefits from neighbor information
if it is available.
4.2 Lat-Long Embeddings
Some neighborhoods lack clues to pronunciation
of the target feature. Jedoch, pronunciation of
names is to some extent influenced by region,
so the model might be able to deduce the pro-
nunciation if given latitude/longitude coordinates
of the main feature. We thus added embeddings
to represent this information. An n by n grid
was placed over Japan. Simply assigning a sep-
arate embedding to each square would require
many embeddings and might slow the training.
Auch, due to Japan’s shape, many embeddings
would be in the sea and thus unused. Daher, eher
than having n2 embeddings, we treated each di-
mension separately resulting in 2n embeddings,
each of size |emb size/2|. The separate longi-
tude and latitude embeddings for a given square
are then concatenated together, and given to the
decoder as an additional auxiliary input. Experi-
ments showed that this configuration both trained
faster and reduced overfitting.
4.3 Overfitting
that it was known that there are incorrect pro-
nunciations in the data and since we wanted to
use the model to find errors, including ones in
the training data, 100% accuracy on the training
set was actually undesirable. A few techniques
were used to combat overfitting. As well as the
heavy use of dropout, label smoothing was set at
0.2, encouraging the model to be less confident
about outliers. Since source tokens were added
to the neighbor information, this made it easier
for the model to memorize locations from their
neighbor arrangements, so to mitigate against this
the neighbors were shuffled within a batch before
being processed by the model.4 Also, care had to
be taken to balance the size of the lat-long grid,
between providing a useful clue to location, Und
allowing memorization of the location if the grid
was too fine.
To assess potential overfitting during training,
we created a small golden set of 2,008 hoch
confidence pronunciations from the human eval-
uations that we ran while developing the model
(Abschnitt 6). The distribution of these examples
is very skewed with respect to the training data
as a whole since these were all examples where
earlier versions of our model disagreed with the
pronunciations in the training data. With heavy
dropout and label smoothing as described, early
stopping was not required: In particular we did not
observe the accuracy on the golden set dropping
towards the end of training. Im Gegensatz, without
such techniques the model would usually start to
overfit at about 250K steps, whereas with them the
models train to a million steps without overfitting,
and still get higher accuracies.
5 Experiments and Evaluation
The various configurations of the model, mit
and without neighbors, were trained on 2,397,154
neighborhoods, für 1 million steps. Before re-
porting overall performance results, we illustrate
the operation of the with-neighbors transformer
model with an example that illustrates the model
detecting cases where the data is incorrect. Der
, Mezon Nipponbashi, is an
feature,
apartment building in the Nipponbashi district of
is also a part of
Osaka. The problem is that
Tokio, pronounced Nihonbashi, and being more
famous, is arguably the ‘‘default’’ pronunciation.
One of the main challenges with training the
model was overfitting. The reason for this was
4This is not to be confused with shuffling of neighbor-
hoods introduced below in Section 5.2.
90
l
D
Ö
w
N
Ö
A
D
e
D
F
R
Ö
M
H
T
T
P
:
/
/
D
ich
R
e
C
T
.
M
ich
T
.
e
D
u
/
T
A
C
l
/
l
A
R
T
ich
C
e
–
P
D
F
/
D
Ö
ich
/
.
1
0
1
1
6
2
/
T
l
A
C
_
A
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
T
l
A
C
_
A
_
0
0
5
3
5
P
D
.
F
B
j
G
u
e
S
T
T
Ö
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
the golden set. Jedoch, it is also important to
show that the model is indeed learning to attend to
relevant features in the neighborhood. We present
evidence of this in Section 5.4. In Section 5.5
we discuss the important question: How often
does a prediction error make the target name in-
comprehensible?
Moving beyond Section 5, as noted earlier the
maps data has errors, meaning that a small per-
centage of the cases where the hypothesis of the
model differs from what is in the database, Die
database is in fact incorrect. The main practical
application of the model is finding and correcting
these sorts of errors. Determining which dis-
crepancies are errors and which are not requires
human evaluation, and we report results on this
in Section 6. Endlich, since manual evaluation is
expensive, we would like to be able to decide
automatically when we can be confident that a
discrepancy should be judged in the model’s fa-
vor: This is the topic of Section 7. In Section 8,
we demonstrate an application of the model to
a totally different problem.
5.1 Baseline System
As a baseline for comparison we used a proprietary
state of the art Japanese text-normalization system
to produce pronunciations. The system constructs
a lattice using a dictionary and rules, and uses
linear models to score paths and Viterbi search to
select the best path through the lattice.
This system converts an input feature name to
its reading and does not make use of neighbor
Information. To simulate the use of neighbor in-
Formation, we first aligned neighbor names with
their readings using a kanji-to-hiragana aligner
that is part of the text-normalization system in-
troduced above. Zum Beispiel, the neighbor name
would be aligned to its hiragana read-
/
ing
/shita. We then col-
gai,
lect statistics on all kanji substrings and their
hiragana readings, and keep the most common
reading of each substring. Endlich, we find the
longest span(S) in the target name that match
against the substrings collected from the neigh-
Bors, and replace the corresponding portion of
the name’s reading as computed by the text-
normalizer, with the reading found from the neigh-
Bors. Thus if the text-normalizer produces for
/michi,
/shika,
als
the incorrect reading
91
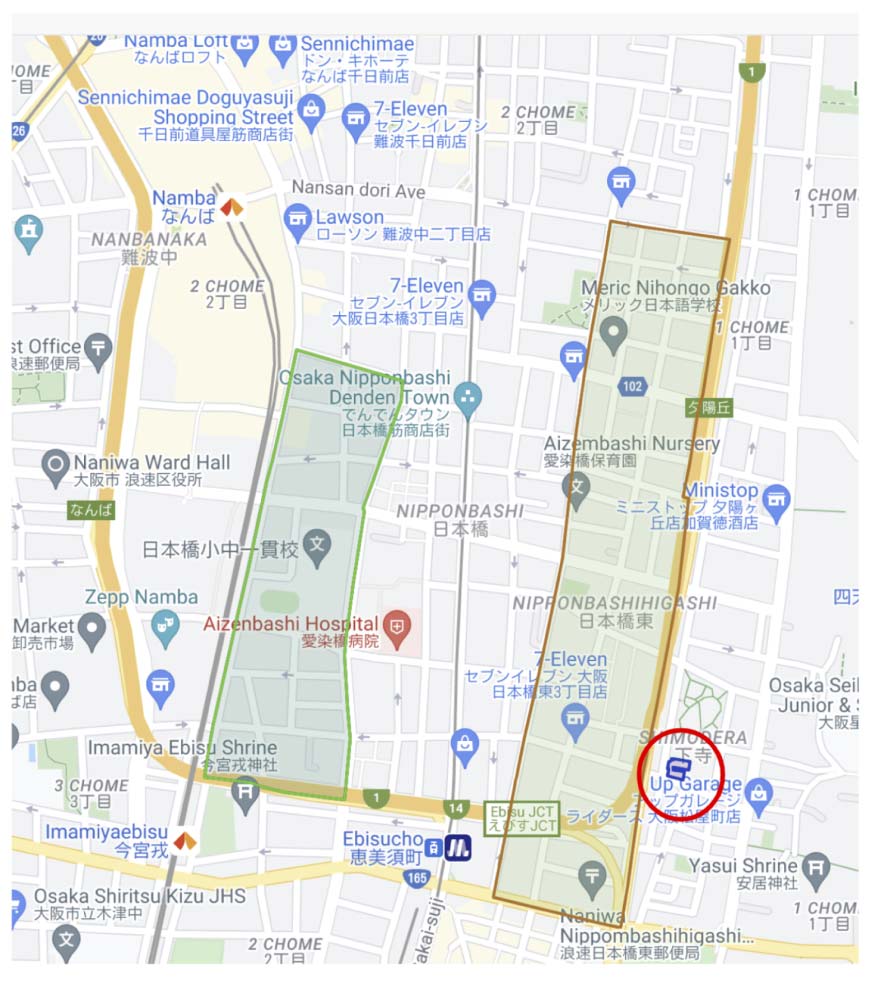
Figur 4: An error in the original data:
Mezon Nipponbashi apartments in Osaka, circled in
red on the map. Highlighted in green shaded areas are
Nipponbashi Higashi
neighboring features,
Und
Nipponbashi Nishi.
The pronunciation of this feature was presumably
originally populated by a method that did not take
geographical context into account. In Abbildung 4
we show the feature, the pronunciation as found
in the database, the hypothesized (correct) Profi-
nunciation, and the neighbors that
the model
attended to when hypothesizing the feature’s pro-
nunciation. The example introduced in Figure 2
is also correctly predicted by the model as seravi
tanmachi.
In the remainder of this section we present two
types of evaluation. First we introduce a non-
neural baseline (Abschnitt 5.1). In Section 5.2, Wir
present error rates on held-out data for several
versions of the model, the non-neural baseline,
and a separate RNN model that has been used for
more general text-normalization applications. Wir
show that the with-neighbors transformer model
has by far the best performance. In Section 5.3
we delve a bit deeper into the effect of Lat-Long
Merkmale, as well as details of the performance on
l
D
Ö
w
N
Ö
A
D
e
D
F
R
Ö
M
H
T
T
P
:
/
/
D
ich
R
e
C
T
.
M
ich
T
.
e
D
u
/
T
A
C
l
/
l
A
R
T
ich
C
e
–
P
D
F
/
D
Ö
ich
/
.
1
0
1
1
6
2
/
T
l
A
C
_
A
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
T
l
A
C
_
A
_
0
0
5
3
5
P
D
.
F
B
j
G
u
e
S
T
T
Ö
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
System
Baseline
Baseline
RoadRuNNer
Transformer
Transformer
Transformer + Lat-Long
Transformer + Lat-Long
± Neigh
−
+
−
−
+30
−
+30
Shuffled
Unshuffled
Golden
Params
Steps
0.199
0.179
0.129
0.102
0.0862
0.0892
0.0867
0.198
0.179
0.131
0.103
0.088
n/a
n/a
0.502
0.396
0.442
0.381
0.367
0.332
0.341
n/a
n/a
7.6M
6.56M
9.74M
6.58M
9.76M
n/a
n/a
1M
1M
1M
1M
1M
Tisch 2: Error rates for the non-neural baselines, RoadRuNNer (without neighbors), the without-
neighbors transformer model, and the with-neighbors transformer model on the test data sets. For the
with-neighbors transformer, 30 neighbors were used, somit +30 in the table.
(shishi kai michi ue), the method might correct that
Zu
(shika gai michi ue).
5.2 Quantitative Evaluation
We evaluated the model on a held-out test set con-
sisting of about 138K neighborhoods, comparing
four models: the non-neural baseline (Abschnitt 5.1),
the with-neighbors and without-neighbors trans-
former models, and another sequence-to-sequence
Modell, the RoadRuNNer RNN-based neural text
normalization system (Zhang et al., 2019) trained
on the same data. For RoadRuNNer, the check-
point with the best string error rate on training was
used in evaluation. Note that the RoadRuNNer
system has no access to the neighbor information,
and thus serves as a baseline sanity check for a
sequence-to-sequence model for pronouncing the
feature names in the absence of any information
about other names in the geographical neighbor-
hood. We also analyze the effects of including
Lat-Long embeddings.
We prepared the train-test split in two different
ways; in the first, which we refer to as shuffled,
we sample features uniformly across Japan when
constructing the two sets. In dieser Sekunde, which we
refer to as unshuffled, the held out set is actually
from non-overlapping areas of Japan such that
features in the test set are from areas that the
model will not have seen during training. Clearly
the Lat-Long embeddings cannot be used in the
latter case since the embeddings for the test area
would not be trained. Hier, the point was to
verify that the model is still able to generalize by
making use of neighbors, in neighborhoods from
parts of the country the model will not have seen
Vor. This provides further evidence, in addition
to what we discuss in Section 5.4, that the model
is learning to use the neighbor information. In
practice we use the shuffled set for training and
generating corrections in the data (Abschnitt 6).
transcriptions, und das
Wieder, when we speak of error rates on this
dataset, we know, as discussed above, that there
are incorrect
daher
there are some cases where the model actually
predicts the correct transcription, but is penalized
because the ground ‘‘truth’’ contains an error.
dennoch, while these are frequent enough
to be worth using our method to correct them
(Abschnitt 6), they are still in the minority of cases,
and the majority of the time, what is in the data
set is correct, which in turn means that one can
usefully compare different methods.
Error rates are given in Table 2. For the shuf-
fled data, the error rate of the without-neighbors
baseline system (Abschnitt 5.1) War 19.9%, welche
is quite high but reflects the difficulty of the
task of reading names of geographical features in
Japanese for which the system was not particularly
tuned. Using neighbors (sehen, wieder, Abschnitt 5.1)
we can reduce this to 17.9%, a 2-point abso-
lute reduction. While this reinforces the point
that neighbors are useful for predicting the pro-
nunciation of a target name, the overall error
rates are high. RoadRuNNer outperforms the
baseline, mit 12.9% error on the shuffled data.
The without-neighbors version of the transformer
Modell (10.2%) outperforms RoadRuNNer by 2.7
points absolute, with the with-neighbors trans-
former reducing the error rate by a further 1.6
points.
Is this reduction significant? Given the Cen-
tral Limit Theorem for Bernouilli trials (Grinstead
92
l
D
Ö
w
N
Ö
A
D
e
D
F
R
Ö
M
H
T
T
P
:
/
/
D
ich
R
e
C
T
.
M
ich
T
.
e
D
u
/
T
A
C
l
/
l
A
R
T
ich
C
e
–
P
D
F
/
D
Ö
ich
/
.
1
0
1
1
6
2
/
T
l
A
C
_
A
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
T
l
A
C
_
A
_
0
0
5
3
5
P
D
.
F
B
j
G
u
e
S
T
T
Ö
N
0
7
S
e
P
e
M
B
e
R
2
0
2
3
We see that for the zero-neighbor (= without-
neighbors) model the Lat-Long embeddings give
a significant boost to the accuracy as one might
expect, but as we add more neighbors the benefit
appears to diminish, and after about 10 neighbors
it seems to hurt performance. This is likely due
to overfitting as the extra information makes it
easier to memorize a location.
Surprisingly, for the golden set (Tisch 2, col-
umn 5), despite neighbors lowering the error, Und
the addition of the Lat-Long embeddings low-
ering it further, the lowest error is achieved by
adding Lat-Long embeddings only. We believe
that this is due to the different distribution of
the examples in the dataset and again the ef-
fect of more information allowing overfitting. In
practice we keep both the Lat-Long embeddings
and use neighbor information for decoding po-
tential correction since the results seem qualita-
tively better.
5.4 The Model Attends to Neighbors
For further confirmation that the model attends to
the neighbors, we created artificial data using fea-
tures containing seven name spellings that have (bei
least) two pronunciations. To create these seven
test sets, we started with real neighborhoods,
and manipulated them as follows. We focused
here on the two most common pronunciations
and designated the more common pronuncia-
tion as ‘P1’ and the other as ‘P2’. Zum Beispiel,
, primary pronun-
consider toponyms spelled
ciation (P1) koube, secondary pronunciation (P2)
koudo. Features containing that kanji spelling in-
, koube denchi ‘Kobe Battery’,
clude
koudo ¯ohashi ‘Koudo Bridge’. Wir
Und
decoded our set under three conditions: (1) leav-
ing the pronunciations of the neighbors alone;
(2) changing all relevant portions of a neighbor’s
, to have a P1
In
name, Zum Beispiel,
(koube) no matter what the original pronunciation
War; (3) similarly changing all relevant portions to
P2 (koudo) no matter what the original pronunci-
ation was. The with-neighbors transformer model
was then used to decode the target feature, Und
we measured the proportion of times P1 was de-
coded under the various (possibly artificial) con-
ditions. The results of this experiment are shown
in Table 3. As can be seen in the table, the propor-
tion of P1 is always affected by artificially manip-
ulating the neighbors, though more dramatically
Figur 5: Model accuracies for different number of max
neighbors, with and without latitudinal and longitudinal
embeddings (shuffled test set).
(cid:2)
and Snell, 1997, P. 330), Die 95% confidence in-
P(1 − p)/N , where N is
terval is given as ±
the number of trials. With N = 132, 753 Und
p = 0.102 for the without-neighbors transformer
model and p = 0.0862 for the with-neighbors
transformer model, the confidence intervals are
[0.1012, 0.1028] Und [0.0854, 0.0870],
bzw-
aktiv. These do not overlap, suggesting that
the differences are significant. We further com-
pared the two models using paired bootstrap
resampling (Koehn, 2004), where for each of
Die 10,000 trials we randomly with replacement
drew N/2 elements from the original test set and
computed accuracies. This method also indicates
the superiority of the with-neighbors model for
the nominal significance level α = 0.05 mit
P < α and non-overlapping 95% confidence in-
tervals [0.104, 0.100] for without-neighbors and
[0.088, 0.084] for with-neighbors models. Finally,
we also confirm the statistical significance by per-
forming the paired permutation test (Good, 2000)
using a t-statistic, which for 5,000 permutations
yields p = 0.0003 for α = 0.05, where p < α.
As expected all the models perform worse on
the unshuffled data, because in that case the test
data is more dissimilar to the training data, since
it is drawn from different regions of the country.
Still, the with-neighbors transformer model still
gives a significant drop in error rate, reinforcing
the point that the model uses neighbors when
available.
5.3 Lat-Long and Golden Set
Figure 5 shows the effect of adding Lat-Long
embeddings for different numbers of neighbors.
93
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
t
l
a
c
_
a
_
0
0
5
3
5
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Name
Proportion P1 in decoding hypotheses
# exx.
1,110
790
420
780
4,639
1,360
4,670
P1
nihonbashi
P2
nipponbashi
misato
saeki
kodaira
koube
shibuya
yamato
sangou
saiki
obira
koudo
shibutani
taiwa
Original
0.86
0.79
0.66
0.91
0.96
0.98
0.86
Neigh. → P1
1.0
Neigh. → P2
0.04
0.83
0.86
0.93
0.97
0.99
0.86
0.06
0.58
0.62
0.83
0.85
0.85
Table 3: Synthetic examples demonstrating that the system pays attention to the neighbors. Columns:
relevant kanji spelling of the target feature; number of target features; primary pronunciation; secondary
pronunciation; proportion of decodings of the primary pronunciation with unchanged data; proportion
of decodings of the primary pronunciation when the data are changed as in (2) in the text; proportion of
decodings of the primary pronunciation when the data are changed as in (3).
of the neighbors in computing its decision on the
pronunciation of a target feature.
Further evidence can be seen in visualizations
of the transformer attention to neighbors’ pro-
nunciations. Figure 6 shows average attention
weights over all layers and attention heads. The
neighbors from Figure 2 correspond to neighbors
5 and 6 here. When decoding the last four charac-
in tanmachi, the model is attending
ters
to the neighbors that contain this sequence.
5.5 Detailed Error Analysis:
How Bad Are the Errors When the
Model Gets it Wrong?
As a reviewer for an earlier version of this pa-
as Nihonbashi
per pointed out, reading
as part of a feature name in Osaka (correct pro-
nunciation: Nipponbashi) is wrong, but the hearer
would likely still be able to understand the in-
tended feature. It should be no worse than reading
Houston (Street) in New York as
. A
reasonable question is what proportion of the
errors that the model makes are similarly ‘recov-
erable’ in the sense that the hearer will be able
to understand the intended referent. To that end
we took a random sample of 60 errors made by
the best performing model (with-neighbors trans-
former model trained on shuffled data, Table 2,
row 6) and compared them to the reference tran-
scription from the maps database. The third author,
a native speaker of Japanese, evaluated how many
of these seemed recoverable in the sense above.
Of the 60, 48 were deemed to be recoverable,
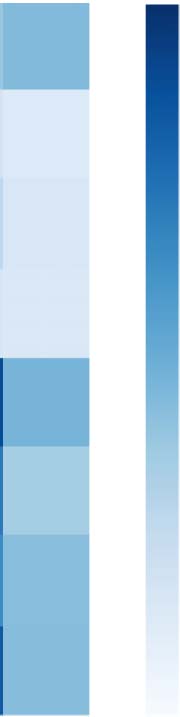
Figure 6: Visualization of transformer attention for the
example in Figure 2, with neighbor positions 5 and 6
corresponding to the two neighbors highlighted in that
figure. Note the higher attention (darker blue) in the
tanmachi in
lower right corresponding to
the neighbors.
so in some cases than others. The signal for the
pronunciation yamato for
is evidently very
strong compared to taiwa so that it is very hard
to override it with evidence from the neighbors.
nihon/nipponbashi is
On the other hand,
easily influenced by the pronunciations of the
neighbors. In all cases the neighbors influence the
results in the expected direction. This small ex-
periment thus provides further evidence that the
model is paying attention to the pronunciations
94
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
t
l
a
c
_
a
_
0
0
5
3
5
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
whereas the other 12 either seemed not to be
recoverable or were unclear. An example of a
, where the reference
recoverable error is
transcription is Hachimanda whereas the model
predicts Hachimanden. This hinges on the pronun-
ciation of the final kanji using the native (ta/da)
pronunciation versus the Sino-Japanese (ten/den)
pronunciation; both pronunciations are in prin-
ciple possible. Another recoverable example is
, where the reference is Hirach¯o, but the
model predicts Hiramachi. Again this hinges on
the native (machi) versus Sino-Japanese (ch¯o) pro-
nunciation of the final character. This latter case
is particularly hard even for native speakers to
‘town’
get right, since the pronunciation of
as ch¯o or machi is not predictable and must be
memorized for each place name.
An example of an unrecoverable error
is
R¯oje Asao,5 which the model pre-
dicts as R¯oje Asabu. In this case, the difference
, but
hinges on two native ways to read
here the predicted Asabu is potentially confus-
ing. While the feature in question is an apartment
building in Sapporo, a hearer familiar with Tokyo
is likely to confuse it with a well-known area of
Azabu. A more dramatic example
Tokyo,
, a part of Kyoto, where the correct pro-
is
nunciation is Hitsujisaruch¯o, whereas the model
predicted Konch¯o. Once again this hinges on a
native (hitsujisaru) versus Sino-Japanese (kon)
pronunciation, in this case for the first character.
So in 80% of the cases, even though the
model picks an inappropriate pronunciation, the
result is still recoverable. For the remaining 20%,
the model did not produce random unrelated
pronunciations, but rather theoretically possible
pronunciations—indeed, errors that a person not
familiar with the area might make—but where the
pronunciation was deemed too far off to be recov-
erable. However, we want to stress that in general
whether a possible but incorrect pronunciation of
a Japanese place name is recoverable or not is
an issue that can only be properly answered by a
more rigorous study of users in real-life situations.
6 Finding Mistakes in Maps Data
An important application of the model is to find
potential errors in the database, and flag them
5Apparently for L’Osier Asao.
for possible human correction. To that end, us-
ing the with-neighbors transformer model trained
with all features, we ran decoding on the en-
tire data set, including the training and held-out
portions, and identified cases where the model
hypothesized a different pronunciation from what
was in the reference transcription. In order to
focus on the cases of interest, we further fil-
tered these by considering only neighborhoods
where some neighbors have spellings that share
substrings with the target feature’s spelling, and
pronunciations that share substrings with the hy-
pothesized pronunciation. This yielded a set of
18,898 neighborhoods that had some discrepancy
per the model. Especially for the training por-
tion, it is likely that the model learned whatever
pronunciation was in the database, even if it was
wrong, so we are likely missing a lot of neigh-
borhoods that have errors: We do not, therefore,
know the recall of the system. In what follows,
we consider the precision, based on a manual
analysis by human raters.
Preliminary analysis of the output revealed
that many of the discrepancies involved estab-
lishments, which include buildings and other
man-made features including things like bus
stops. These often contain a location name
the name. For example, a Fam-
as part of
ily Mart convenience store might be named
Family Mart
Kobashi Station Square Store, with the issue
is correctly pronounced in
being whether
the establishment name.
Three raters6 manually checked pronuncia-
tions for 1,056 features, including 555 establish-
ment features. Raters were given links to the
feature on Google Maps, and were asked to ver-
ify which pronunciation was correct, or give an
alternative if neither was correct. Evaluators had
to provide ‘proof’ of their answers, of which the
following were considered acceptable: (a) official
website of the location, or the Japan Post web-
site; (b) a screenshot from Street View showing
the pronunciation (e.g., from a road sign); (c) a
Wikipedia page with sufficient appropriate refer-
ences. Raters were asked not to use other sources.
Overall, the raters found that the model cor-
rectly detected that there was a potential problem
with the reference data 63% of the time. The
6All raters employed in this study are paid linguistic
consultants hired through a third party vendor.
95
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
t
l
a
c
_
a
_
0
0
5
3
5
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
N
401
100
N
473
82
Trn
Tst
Trn
Tst
Mixed sample
+Maps
149
49
+Maps
N
0.37
0.49
+Hyp
137
24
Establishments only
+Maps
161
+Maps
N
0.34
+Hyp
189
35
0.43
29
+Hyp
N
0.34
0.24
+Hyp
N
0.40
0.35
Figure 7: Results of a manual evaluation of 555 es-
tablishment features. See the text for an explanation.
remaining 37% of the features were actually cor-
rect, despite the model having hypothesized a
different pronunciation. The 63% of cases with
problems broke down as follows: In 36% (abso-
lute) of the cases, the hypothesized replacement
pronunciation was correct,
in 11% both were
wrong (meaning that the model detected a prob-
lem, but found the wrong solution), and in 15%
of the cases, the rater was unable to verify the
answer (which suggests that the feature may need
to be checked further). In some categories such as
‘compound building’, the hypothesized pronunci-
ation was correct (and the reference pronuncia-
tion wrong), 80.7% of the time.
Figure 7 shows the results of a manual analy-
sis of the 555 establishments by an independent
rater. The establishments represent a range of
‘‘impressions’’, with some appearing frequently
in searches, others less so. The rater found that
for the majority of cases (55.6%), the data in
maps was incorrect: 39.2% where the hypothe-
sized alternative is the correct one; and 16.4%
where both what is in the data and the hypothe-
sis are wrong, but where the system has detected
a problem with the data. The rater was unsure
about a further 9.2%, constituting a further set that
should be checked by an expert. (A small per-
centage of the establishments have closed since
the database was created.) Thus only about a third
of the establishments selected were correct in
the database.
Table 4: Comparison of two sets of hand-checked
features, showing the cases where either the maps
data (+Maps) or the hypothesis were correct
(+Hyp), broken down into whether the feature in
question was in the training, versus the held-out
data. N is the total size of each set.
where either the data already in maps was deemed
correct, or the hypothesized replacement was
deemed correct. In general the hypothesized cor-
rections had higher accuracies, and the maps data
lower accuracies in the establishment set than in
the mixed set. Also, the model seems to be making
better predictions for the training portion than the
held-out portion. Indeed, for the establishments,
the hypothesis is more often right for the training
portion of the data than what is in the original
training data. While the model probably memo-
rizes aspects of the training data, it can still no-
tice discrepancies even in neighborhoods it has
seen before.
One point that will be clear from the above
is that just because there is a discrepancy be-
tween the pronunciations of a target feature and
the neighboring features does not mean that the
target is wrong. Indeed, there are systematic types
of features that frequently involve such discrep-
ancies. One such class being train stations, which
are notoriously difficult in that they are frequently
pronounced differently from the name of the town
in which they are located (Imao, 2020). Thus
Kowakudani is
the station that serves
Kowakidani eki. Station names were
often established during the Meiji Period, and re-
flect older pronunciations for nearby toponyms.
7 Automatic Data Correction
Table 4 gives a breakdown of
the two
hand-checked samples, considering only cases
Unfortunately the model
is not yet accurate
enough to use it to automatically fix discrepancies
96
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
t
l
a
c
_
a
_
0
0
5
3
5
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
the top candidate being correct. Figure 8 shows
the ROC curve for using this metric to features
from the golden set. It shows an area under the
curve of almost 0.7, a clear positive signal, and the
Precision-Recall curve shows that we are able to
achieve an accuracy of about 80% for about 50%
of the data, which still represents a large number
of high confidence corrections.
8 Cognate Reflex Prediction Task
List et al. (2022) present the ACL SIGTYP shared
task on the problem of cognate reflex prediction.
Cognate reflex prediction is best understood by
example. English, Dutch, and German are closely
related West Germanic languages that share many
cognate words. For example, English dream
corresponds to droom in Dutch and Traum in
German. If one now considers English tree, the
words that correspond in meaning to this in Dutch
and German are boom and Baum, respectively.
These are apparently from the same etymon, but
the English word is not. What should an English
cognate look like? On analogy with dream, one
would predict the form to be beam. Indeed, while
beam’s meaning has shifted, it is in fact related
to boom and Baum. In the SIGTYP task, par-
ticipants were presented with data from several
language families, where the task was to recon-
struct what the cognate forms for particular etyma
would be, given examples in a subset of the sister
languages.
Kirov et al. (2022) report the results of applying
two models to this task, one being a model based
on image inpainting (Liu et al., 2018), and the
second being a variant of the neighbors model
presented in this paper. The cognate reflex predic-
tion problem is similar in spirit to the geographical
feature reading task, where we replace ‘‘neighbor
reading’’ with the form of a cognate in a related
language, and ‘‘target reading’’ with the form to
be predicted. As for the ‘‘spellings’’, we replace
these with a string representing the name of the
language associated with each of the neighboring
cognates and with the target. Table 5 summarizes
the parallels between the two tasks. The model
used by Kirov et al. (2022) differed slightly from
the version reported above in that the language
identifiers and cognate forms are interleaved and
then concatenated together and attended to di-
rectly by the decoder without any averaging, and
source token ids are added to each cognate in the
Figure 8: ROC curve (top), and Precision/Recall
curve (bottom), for threshholding results on the dif-
ference between beam search scores.
for all features. Among the 1,056 manually ana-
lyzed features, the original data was correct 37%
of the time, and the model 35%, meaning that
simply substituting the model’s hypothesis would
result in a small net loss in accuracy. However, we
also saw that the model was more accurate than
the reference data for some classes of features,
meaning on average the accuracy should increase
if we replaced the data in those cases. We have
also investigated filtering the data based on met-
rics extracted from the model itself. For example,
we considered decoding entropy as a measure of
confidence, the log likelihoods of the beam search
outputs, and the relative amount of attention that
the attention layers were giving the neighbor sum-
mary. Thus far, the most informative measure is
difference between the top two beam search de-
coding log likelihoods. Our interpretation of this
is that if there is a large difference in confidence
between the two beams then there is little am-
biguity in how the model thinks they should be
pronounced and thus we can be more confident in
97
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
t
l
a
c
_
a
_
0
0
5
3
5
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Cognate reflex
target form
target lang.
related form
related lang.
related form
related lang.
related form
related lang.
...
L1
L2
L3
L4
...
Geo. name task
← main feature1 pron.
← main feature1 name
← neigh. feature2 pron.
← neigh. feature2 name.
← neigh. feature3 pron.
← neigh. feature3 name.
← neigh. feature4 pron.
← neigh. feature4 name.
...
...
Table 5: Parallels between the cognate reflex
prediction and the geographical name reading
prediction tasks. ‘‘L1’’ and so forth in the first
column represent the names of the languages in
the set.
set. This allows the model to better attend to
the individual cognate and to copy (portions of)
the cognate as needed. Also, since the data sets
for the cognate reconstruction task are small, a
smaller transformer configuration was used. Even
so, the provided data sets were too small, so Kirov
et al. (2022) augmented the data in two ways.
First, the data were augmented by copying neigh-
borhoods while randomly removing neighbors,
thus making new neighborhoods for the same
cognate set. Second, synthetic cognate sets were
generated for each of the ‘‘neighbor’’ languages
and the target using simple n-gram models trained
on the provided data.
The two systems developed by Kirov et al.
(2022) achieved the top ranking in the shared
task. In general, the better performing of the two
was the inpainting model, but on some language
families, such as Semitic, the neighbors model out-
performed the inpainting model. Table 6, adapted
from List et al.’s (2022) Table 4, shows the re-
sults for two baselines, the inpainting model, three
versions of the neighbors model—30K, 35K, and
100K training steps—and three other competing
systems. The rank in the final column is aggre-
gated over the normalized edit distance (NED),
B-cubed F-scores, and BLEU. The inpainting
model and the neighbors model were the only
two systems that overall outperformed the SVM
baseline. The fact that the 30K neighbors model
worked better than higher numbers of training
steps can likely be attributed to overtraining.
These results suggest that the model we have
System
Rank NED B-Cubes BLEU Aggregated
Inpainting
Neighbors 30K
Neighbors 35K
SVM Baseline
Neighbors 100K
System 2
System 3
CORPAR Baseline
System 4
1
2
3
4
5
6
7
8
9
1
2.6
2.4
5.2
4.6
6
7.6
6.8
8.8
1.2
3
4
4
6.6
7
4
6.2
9
1
2.6
2.4
5
4.6
6.2
7.6
6.8
8.8
1.1 ± 0.3
2.7 ± 0.4
2.9 ± 0.9
4.7 ± 1.9
5.3 ± 1.3
6.4 ± 1.1
6.4 ± 2.5
6.6 ± 0.8
8.9 ± 0.4
Table 6: Average ranks of systems in the SIGTYP
2022 Shared Task along with aggregated ranks.
presented in this paper has potential applications
outside the main task we have reported here.
9 Discussion
In this paper we have presented a novel architec-
ture for the difficult task of pronouncing Japanese
geographical features that learns to use pronun-
ciations of features in a local neighborhood as
hints. We have shown via various means that the
model pays attention to the neighboring features,
and that therefore the model has learned what we
intended it to learn: That in order to pronounce a
name, it is often useful to consider how neighbors
are pronounced. We also conducted manual eval-
uations showing that for some classes of features,
model hypotheses differing from pronunciations
in the database could be as high as 80% correct.
Our results are currently being used to correct
errors in Google Maps. In future work we also
plan to extend the coverage of the model beyond
Japan. While Japanese place names are particu-
larly difficult, we noted in the Introduction that
there are similar problems in other regions. One
problem that comes up in the United States, for
example, is nonce abbreviations for certain fea-
tures. For example if one looks in Google Maps
in Shreveport, LA, one will run across the weirdly
abbreviated Sprt Bkdl Hwy Srv Dr. Out of context
this is virtually uninterpretable, but if one looks
at nearby features one will find the Shreveport
Barksdale Hwy. From this and other information
one can deduce that the mysteriously named fea-
ture must be the Shreveport Barksdale Highway
Service Drive.
Besides geographical names, there are other
problems to which a similar approach can be ap-
plied. The neighbor model can be thought of as an
98
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
t
l
a
c
_
a
_
0
0
5
3
5
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
auxiliary memory, to be consulted or not depend-
ing on the decision being made. We discussed
one possible application of this conceptualiza-
tion to the task of cognate reflex prediction in
Section 8.
A further extension of the idea is joint correc-
tion of features in a neighborhood. If most of
in a neighborhood
the pronunciations of
are nipponbashi, then one could consider cor-
recting all cases where the pronunciation is listed
as nihonbashi in the neighborhood, not just the
main feature. Note that this is somewhat similar
in spirit to work on collective classification (Sen
et al., 2008).
Finally, it is also worth noting that while our
work has been with a proprietary maps database,
there are open-source maps datasets such as
OpenStreetMap (Haklay and Weber, 2008), which
likely have at least as many problematic issues as
the database we used. The techniques we de-
scribe in this paper could be applied to improving
such data.
Acknowledgments
We thank three anonymous reviewers of previous
versions of this paper for detailed feedback. We
also thank Jesse Rosenstock for help with the code
that extracts neighborhoods.
References
William Chan, Navdeep Jaitly, Quoc V. Le, and
Oriol Vinyals. 2016. Listen, attend and spell:
A neural network for large vocabulary conver-
sational speech recognition. In Proceedings of
2016 IEEE International Conference on Acous-
tics, Speech and Signal Processing (ICASSP),
pages 4960–4964, Shanghai, China.
IEEE.
https://doi.org/10.1109/ICASSP.2016
.7472621
Falcon Dai and Zheng Cai. 2017. Glyph-aware
embedding of Chinese characters. In Proceed-
ings of the First Workshop on Subword and
Character Level Models in NLP, pages 64–69,
Copenhagen, Denmark. Association for Com-
putational Linguistics.
Phillip Good. 2000. Permutation Tests: A Practi-
cal Guide to Resampling Methods for Testing
Hypotheses, 2nd edition. Springer Series in
Statistics. Springer, New York, NY. https://
doi.org/10.1007/978-1-4757-3235-1 3
Kyle Gorman, Gleb Mazovetskiy, and Vitaly
Nikolaev. 2018. Improving homograph disam-
biguation with supervised machine learning. In
Proceedings of the Eleventh International Con-
ference on Language Resources and Evalua-
tion (LREC 2018), pages 1349–1352, Miyazaki,
Japan. European Language Resources Associa-
tion (ELRA).
Charles Grinstead and J. Laurie Snell. 1997.
Introduction to Probability, 2nd edition. Amer-
ican Mathematical Society, Providence, RI.
Mordechai Haklay and Patrick Weber. 2008.
OpenStreetMap: User-generated street maps.
IEEE Pervasive Computing,
7(4):12–18.
https://doi.org/10.1109/MPRV.2008.80
Keisuke Imao. 2020.
Ekimei Gaku Ny¯umon (An Introduction to
the Study of Station Names).
Chuokoron-Shinsha, Tokyo.
Melvin Johnson, Mike Schuster, Quoc V.
Le, Maxim Krikun, Yonghui Wu, Zhifeng
Chen, Nikhil Thorat, Fernanda Vi´egas, Martin
Wattenberg, Greg Corrado, Macduff Hughes,
and Jeffrey Dean. 2017. Google’s multi-
lingual neural machine translation system:
Enabling zero-shot translation. Transactions of
the Association for Computational Linguistics,
5:339–351. https://doi.org/10.1162
/tacl_a_00065
Riku Kawamura, Tatsuya Aoki, Hidetaka
Kamigaito, Hiroya Takamura, and Manabu
Okumura. 2020. Neural
text normalization
leveraging similarities of strings and sounds.
In Proceedings of
the 28th International
Conference on Computational Linguistics,
pages 2126–2131, Barcelona, Spain (Online).
International Committee on Computational
Linguistics. https://doi.org/10.18653/v1
/2020.coling-main.192
Christo Kirov, Richard Sproat, and Alexander
Gutkin. 2022. Mockingbird at
the SIGTYP
2022 shared task: Two types of models for
the prediction of cognate reflexes. In Pro-
ceedings of the 4th Workshop on Research
in Computational Typology and Multilin-
gual NLP (ACL SIGTYP), pages 70–79,
Seattle, Washington. Association for Compu-
tational Linguistics. https://doi.org/10
.18653/v1/2022.sigtyp-1.9
99
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
t
l
a
c
_
a
_
0
0
5
3
5
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
Philipp Koehn. 2004. Statistical significance tests
for machine translation evaluation. In Pro-
ceedings of the 2004 Conference on Empiri-
cal Methods in Natural Language Processing,
pages 388–395, Barcelona, Spain. Association
for Computational Linguistics.
Johann-Mattis List, Ekaterina Vylomova, Robert
Forkel, Nathan Hill, and Ryan Cotterell. 2022.
The SIGTYP 2022 shared task on the predic-
tion of cognate reflexes. In Proceedings of the
4th Workshop on Research in Computational
Linguistic Typology and Multilingual NLP,
pages 52–62, Seattle, Washington. Association
for Computational Linguistics.
Guilin Liu, Fitsum A. Reda, Kevin J. Shih,
Ting-Chun Wang, Andrew Tao, and Bryan
Catanzaro. 2018. Image inpainting for irregular
holes using partial convolutions. In Proceed-
the 15th European Conference on
ings of
Computer Vision (ECCV 2018), pages 89–105,
Munich, Germany. Springer
International
Publishing. https://doi.org/10.1007
/978-3-030-01252-6_6
Courtney Mansfield, Ming Sun, Yuzong Liu,
Ankur Gandhe, and Bj¨orn Hoffmeister. 2019.
Neural text normalization with subword units.
In Proceedings of the 2019 Conference of the
North American Chapter of the Association
for Computational Linguistics: Human Lan-
guage Technologies, Volume 2 (Industry Pa-
pers), pages 190–196, Minneapolis, Minnesota.
Association for Computational Linguistics.
https://doi.org/10.18653/v1/N19
-2024
Minh Nguyen, Gia H. Ngo, and Nancy F.
Chen. 2020. Hierarchical character embeddings:
Learning phonological and semantic represen-
tations in languages of logographic origin using
recursive neural networks. IEEE/ACM Trans-
actions on Audio, Speech, and Language Pro-
cessing, 28:461–473. https://doi.org/10
.1109/TASLP.2019.2955246
Yuji Ogihara. 2021. I know the name well, but
cannot read it correctly: Difficulties in read-
ing recent Japanese names. Humanities and
Social Sciences Communications, 8(1):1–7.
https://doi.org/10.1057/s41599-021
-00810-0
100
Kyubyong Park and Seanie Lee. 2020. g2pM: A
neural grapheme-to-phoneme conversion pack-
age for Mandarin Chinese based on a new open
benchmark dataset. In Proceedings of Inter-
speech 2020, pages 1723–1727, Shanghai,
China. International Speech Communication
Association. https://doi.org/10.21437
/Interspeech.2020-1094
Ben Peters, Jon Dehdari, and Josef van Genabith.
2017. Massively multilingual neural grapheme-
to-phoneme conversion. In Proceedings of the
First Workshop on Building Linguistically
Generalizable NLP Systems, pages 19–26,
Copenhagen, Denmark. Association for Com-
putational Linguistics. https://doi.org
/10.18653/v1/W17-5403
Subhojeet Pramanik and Aman Hussain. 2019.
Text normalization using memory augmented
neural networks. Speech Communication,
109:15–23. https://doi.org/10.1016
/j.specom.2019.02.003
Golan
Pundak, Tara N.
Sainath, Rohit
Prabhavalkar, Anjuli Kannan, and Ding Zhao.
2018. Deep context: End-to-end contextual
speech recognition. In Proceedings of 2018
IEEE Spoken Language Technology Work-
shop (SLT), pages 418–425, Athens, Greece.
IEEE. https://doi.org/10.1109/SLT
.2018.8639034
Kanishka Rao, Fuchun Peng, Has¸im Sak,
and Franc¸oise Beaufays. 2015. Grapheme-to-
phoneme conversion using Long Short-Term
Memory recurrent neural networks. In Proceed-
ings of 2015 IEEE International Conference
on Acoustics, Speech and Signal Processing
(ICASSP), pages 4225–4229, South Brisbane,
Australia. IEEE.
Sat¯o.
Norihiko
1985.
, Chimei hy¯oki to JIS kanji,
(on the expression of place names and JIS Chi-
, Suirobuz
nese characters).
Kenky¯u H¯okoku, (Hydrographic Department
Research Report), 20:167–180.
Prithviraj Sen, Galileo Namata, Mustafa Bilgic,
Lise Getoor, Brian Gallagher, and Tina Eliassi-
Rad. 2008. Collective classification in network
data. AI Magazine, 29(3):93–106. https://
doi.org/10.1609/aimag.v29i3.2157
Yi Shi, Congyi Wang, Yu Chen,
and
Bin Wang. 2021. Polyphone disambiguation
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
t
l
a
c
_
a
_
0
0
5
3
5
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
in Mandarin Chinese with semi-supervised
learning. In Proceedings of Interspeech 2021,
pages 4109–4113, Brno, Czech Republic. In-
ternational Speech and Communication Asso-
ciation (ISCA). https://doi.org/10.21437
/Interspeech.2021-502
Richard Sproat and Navdeep Jaitly. 2017. An
RNN model of text normalization. In Proceed-
ings of Interspeech, pages 754–758, Stockholm,
Sweden. International Speech and Commu-
nication Association (ISCA). https://doi
.org/10.21437/Interspeech.2017-35
Shubham Toshniwal and Karen Livescu. 2016.
Jointly learning to align and convert graphemes
to phonemes with neural attention models.
In 2016 IEEE Spoken Language Technology
Workshop (SLT), pages 76–82, San Diego, CA,
USA. IEEE. https://doi.org/10.1109
/SLT.2016.7846248
Oanh Thi Tran and Viet The Bui. 2021. Neu-
ral text normalization in speech-to-text systems
with rich features. Applied Artificial Intelli-
gence, 35(3):193–205. https://doi.org
/10.1080/08839514.2020.1842108
Ashish Vaswani, Noam Shazeer, Niki Parmar,
Jakob Uszkoreit, Llion Jones, Aidan N.
Gomez, Łukasz Kaiser, and Illia Polosukhin.
In Pro-
2017. Attention is all you need.
ceedings of the 31st Conference on Neural
Information Processing Systems (NIPS 2017),
pages 5998–6008, Long Beach, CA, USA.
Curran Associates Inc.
Kaisheng Yao and Geoffrey Zweig. 2015.
Sequence-to-sequence neural net models for
In Pro-
grapheme-to-phoneme conversion.
ceedings of Interspeech, pages 3330–3334,
Dresden, Germany. International Speech and
Communication Association (ISCA).
David Yarowsky. 1996. Homograph disambigua-
tion in text-to-speech synthesis. In Jan van
Santen, Richard Sproat, Joseph Olive, and Julia
Hirschberg, editors, Progress in Speech Synthe-
sis, pages 157–172, New York, NY. Springer.
https://doi.org/10.1007/978-1-4612
-1894-4 12
Sevinj Yolchuyeva, G´eza N´emeth, and B´alint
Gyires-T´oth. 2019. Grapheme-to-phoneme con-
version with convolutional neural networks.
Applied Sciences, 9(6). https://doi.org
/10.3390/app9061143
Sevinj Yolchuyeva, G´eza N´emeth, and B´alint
Gyires-T´oth. 2018. Text normalization with
convolutional neural networks. International
Journal of Speech Technology, 21:589–600.
https://doi.org/10.1007/s10772-018
-9521-x
Mingzhi Yu, Hieu Duy Nguyen, Alex Sokolov,
Jack Lepird, Kanthashree Mysore Sathyendra,
Samridhi Choudhary, Athanasios Mouchtaris,
and Siegfried Kunzmann. 2020. Multilingual
grapheme-to-phoneme conversion with byte
the 2020
representatoin. In Proceedings of
IEEE International Conference on Acous-
tics, Speech and Signal Processing (ICASSP),
pages 8234–8238, Barcelona, Spain. IEEE.
Hao Zhang, Richard Sproat, Axel Ng, Felix
Stahlberg, Xiaochang Peng, Kyle Gorman, and
Brian Roark. 2019. Neural models of text nor-
malization for speech applications. Computa-
tional Linguistics, 45(2):293–337. https://
doi.org/10.1162/coli a 00349
101
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
t
a
c
l
/
l
a
r
t
i
c
e
-
p
d
f
/
d
o
i
/
.
1
0
1
1
6
2
/
t
l
a
c
_
a
_
0
0
5
3
5
2
0
6
8
1
2
7
/
/
t
l
a
c
_
a
_
0
0
5
3
5
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3