Applying Computational Models of Spatial
Prepositions to Visually Situated Dialog
John D. Kelleher∗
Dublin Institute of Technology
Fintan J. Costello∗∗
University College Dublin
This article describes the application of computational models of spatial prepositions to visually
situated dialog systems. In these dialogs, spatial prepositions are important because people
often use them to refer to entities in the visual context of a dialog. We first describe a generic
architecture for a visually situated dialog system and highlight the interactions between the
spatial cognition module, which provides the interface to the models of prepositional semantics,
and the other components in the architecture. Following this, we present two new computational
models of topological and projective spatial prepositions. The main novelty within these models
is the fact that they account for the contextual effect which other distractor objects in a visual
scene can have on the region described by a given preposition. We next present psycholinguistic
tests evaluating our approach to distractor interference on prepositional semantics, and illustrate
how these models are used for both interpretation and generation of prepositional expressions.
1. Introducción
A growing number of computer applications share a visualized (virtual or real) espacio
with the user, for example graphic design programs, computer games, navigation aids,
robot systems, Etcétera. If these systems are to be equipped with dialog interfaces,
they must be able to participate in visually situated dialog. Visually situated dialog is
spoken from a particular point of view within a physical or simulated context. De
theoretical linguistic and cognitive perspectives, visually situated dialog systems are
interesting as they provide ideal testbeds for investigating the interaction between
language and vision. From a human–computer interaction (HCI) perspectiva, visually
situated dialog systems promise many advantages to users interacting with these
sistemas. In this article we describe computational models for the interpretation and
generation of visually situated locative expressions involving topological and projective
spatial prepositions.
Contributions An inherent aspect of visually situated dialog is reference to objects
in the physical environment in which the dialog occurs. People often use locative
∗ School of Computing, Dublin Institute of Technology, Kevin Street, Dublín 8, Irlanda. Correo electrónico:
john.kelleher@comp.dit.ie.
∗∗ School of Computer Science and Informatics, University College Dublin, Belfield, Dublín 4, Irlanda.
Correo electrónico: fintan.costello@ucd.ie.
Envío recibido: 31 Julio 2006; revised submission received: 30 Marzo 2007; accepted for publication:
4 Julio 2007.
© 2008 Asociación de Lingüística Computacional
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Ligüística computacional
Volumen 35, Número 2
expresiones, in particular spatial prepositions, to pick out objects in the visual envi-
ambiente. In this article we present computational models of the semantics of spatial
prepositions and illustrate how these models can be used in a visually situated dialog
system for reference resolution and generation. These models are designed to handle
reference resolution and generation in complex visual environments containing multi-
ple objects, and to account for the contextual influence which the presence of multiple
objects has on the semantics of spatial prepositions. In this our models move beyond
other accounts, which typically do not model the contextual influence of other objects
on spatial semantics. Because most real-world visual scenes are complex and contain
multiple objects, our models for the semantics of spatial prepositions are important for
visually situated dialog systems intended to operate usefully in the real world.
Overview We begin in Section 2 by describing some terminology we use when
discussing locative expressions. En la sección 3 we present an abstract architecture for
a visually situated dialog system and, using this architecture, illustrate how the spa-
tial reasoning component of the architecture interacts with the other components of
the system. En la sección 4 we review psycholinguistic data on the semantics of spatial
prepositions. Sección 5 reviews previous computational models of spatial prepositional
semantics. Sección 6 presents our computational models accounting for the semantics of
spatial prepositions and the influence of visual context on those semantics, y Sección 7
presents psycholinguistic evaluation of these models. Sección 8 presents applications of
the models in implemented systems. Sección 8.1 presents an application of our models
to the interpretation of locative expressions, based on Kelleher, Kruijff, and Costello
(2006), y Sección 8.2 presents algorithms which use these models to generate locative
expressions to identify objects in visual scenes from Kelleher and Kruijff (2006).
2. Terminology
Our computational models are designed to interpret and generate locative expressions
involving spatial prepositions. The term locative expression describes “an expression
involving a locative prepositional phrase together with whatever the phrase modifies
(noun, cláusula, etc.)" (Herskovits 1986, página 7). In this article we use the term target
(t) to refer to the object that is being located by a locative expression and the term
landmark1 (l) to refer to the object relative to which the target’s location is described;
see Example (1). We will use the term distractor to describe any object in the visual
context that is neither the landmark nor the target.
Ejemplo 1
[The man]T near [the table]l.
The English lexicon of spatial prepositions numbers above 80 miembros (not consid-
ering compounds such as right next to) (Landau 1996). Within this set a distinction can
be made between static and dynamic prepositions: static prepositions primarily2 denote
1 There is a wealth of terms used in the literature describing locative expressions. The terms local object,
figure object, and trajector are all equivalent to our term target while the terms reference object, ground,
and relatum are equivalent to our term landmark.
2 Static prepositions can be used in dynamic contexts, Por ejemplo, the man ran behind the house, y
dynamic prepositions can be used in static ones, Por ejemplo, the tree lay across the road.
272
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Cifra 1
Architecture of a visually situated dialog system.
the location of an object, dynamic prepositions primarily denote the path of an object
(Jackendoff 1983; Herskovits 1986), see Examples (2) y (3).
Ejemplo 2
The tree is [behind]static the house.
Ejemplo 3
The man walked [across]dynamic the road.
En general, the set of static prepositions can be decomposed into two sets called
topological and projective. Topological prepositions are the category of prepositions
referring to a region that is proximal to the landmark; Por ejemplo, en, cerca. A menudo, el
distinctions between the semantics of the different topological prepositions is based
on pragmatic constraints, for example the use of at licenses the target to be in contact
with the landmark, while the use of near does not. Projective prepositions describe a
region projected from the landmark in a particular direction, with the specification of
the direction dependent on the frame of reference3 being used; Por ejemplo, to the right
de, to the left of.
3. Visually Situated Dialog System Architecture
In this section we present an abstract implementation-independent architecture for a
visually situated dialog system and highlight the role played by spatial reasoning in the
functioning of the system. En particular, we describe how models of spatial prepositional
semantics are important for reference resolution and generation.
The distinguishing characteristic of a visually situated dialog system is that the
system has the ability to visually perceive the environment in which a dialog is situated.
Como consecuencia, these systems use both visual and linguistic contextual information to
understand user commands and to generate linguistic descriptions of the environment.
Cifra 1 illustrates the visual dialog system architecture we will describe. The arrows in
the figure represent data flows through the system; the boxes are the main information
processing components.
3 In the context of projective prepositions, a frame of reference consists of six half-line axes with a shared
origen; en Inglés, these axes are usually labelled front, atrás, bien, izquierda, arriba, abajo. In English, tres
different frames of reference are distinguished: absolute, intrinsic, and viewer-centered. Curiosamente
sin embargo, although the use of a tripartite system is common in European languages, this is not universal,
with many languages taking different approaches here. We direct the interested reader to Levinson (1996,
2003) and Levelt (1996) for further discussion on frames of reference.
273
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Ligüística computacional
Volumen 35, Número 2
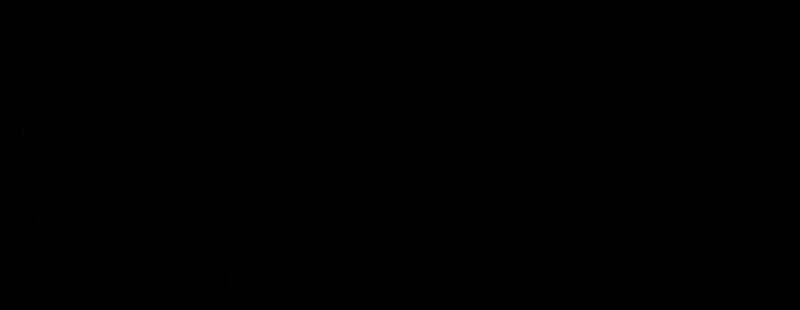
Cifra 2
Example input and output data from a vision subsystem.
There are two information inputs into this system: the vision subsystem and the
speech interpretation pipeline. The vision subsystem directly updates the system’s
representation of the visual context. The basic requirements for the vision subsystem
are that it is able to detect and categorize the objects in the visual context and can
provide geometric positioning information for each visible object. Cifra 2 ilustra
the analysis that a vision subsystem may generate for a given scene.
The speech interpretation pipeline begins with speech recognition. This module
takes a speech utterance from the user and creates a string representation of it. El
parser uses this string to construct a structured representation of the input. Parsers
range in function from wide-coverage syntactic focused parsers, such as Cahill et al.’s
(2004) probabilistic Lexical-Functional Grammar (LFG) parser, to narrow coverage se-
mantic based parsers, for example the CoSy parser (Kruijff, Kelleher, and Hawes 2006).
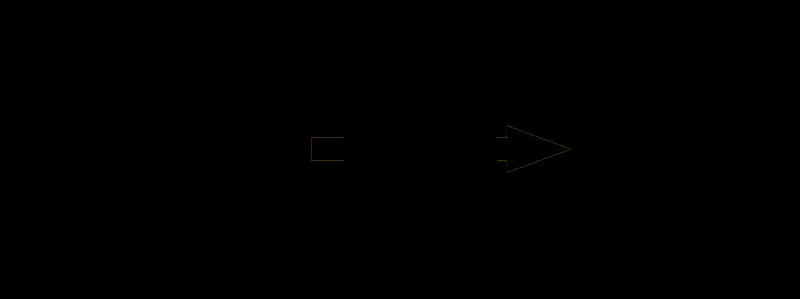
Cifra 3 illustrates the types of analyses produced by these different types of parsers for
the input string is the box near the ball? The parse tree on the left was generated using a
probabilistic wide-coverage LFG parser.4 The parse tree provides a syntactic analysis of
the input string.
Generally, parsers developed for interactive dialog systems integrate semantic, como
well as syntactic, information in their grammars. In these parsers the elements in the
lexicon and grammar are based on an analysis of the entities and relations of the
specific domain the system is designed for. These parsers sacrifice coverage for depth of
análisis. For a dialog system, the advantage of this deeper analysis is that the semantic
information in the parser’s output can be used by the dialog manager to relate the input
to the rest of the dialog. The parse structure on the right of Figure 3 illustrates the type of
semantically rich representation that an interactive dialog system parser might produce
(this particular representation was generated by the CoSy parser).
The CoSy parser uses a Combinatory Categorial Grammar that represents linguistic
meaning using an ontologically rich sorted relational structure (Baldridge and Kruijff
4 A demo of the parser is available at: http://lfg-demo.computing.dcu.ie/lfgparser.html. The parser
also provides detailed LFG f-structures for input strings.
274
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Cifra 3
Example parse structures for the string is the box near the ball?
2002, 2003). Within this representation the statement b2:phys-obj means that the referent
b2 is of type phys-obj (es decir., a physical object as defined by the ontology the grammar in-
dexes). The semantic contribution of the prepositional phrase near the ball is represented
by the
prepositional phrase containing a static preposition that locates the referent b2 in the
region r that is proximal to the landmark described by the
should be noted that the syntactic and semantic representation of prepositions within
grammars is an area of ongoing research (see Gawron 1986; Tseng 2000; Beermann and
Hellan 2004). The analysis presented here of the prepositional phrase near the ball is
intended to illustrate some of the semantic features that prepositions may introduce
into a grammar and is not intended as a comprehensive account of how prepositions
should be grammatically represented.
The final stage in the interpretation pipeline is to categorize how the utterance
relates to the current dialog context. This categorization is driven by the dialog manager
and involves interpreting an utterance as a dialog act (Bunt 1994; Carletta et al. 1997;
Klein 1999). One of the important tasks in this process is resolving the references
in the input. Como consecuencia, the dialog manager may invoke the reference resolution
component. Reference resolution is one of two functions in the architecture where
spatial reasoning plays an important role. From a computational perspective, reference
resolution involves two main tasks:
1.
Creating and maintaining a model of what the system considers as
mutual knowledge (this model should contain all the objects that are
available for reference and their properties)
2. Matching the representation introduced by a given referring expression
to an element (or elements) in the set of possible referents
In a visually situated dialog a referring expression may be exophoric (es decir., denote
an object in the visual context which has not yet been mentioned in the dialog) or it
may be anaphoric (es decir., access a representation of a previous referring expression in the
dialog context). People often use the spatial location of an object, described using spatial
prepositions, when making exophoric references. Como resultado, in order to interpret these
references the system must have access to models of the semantics of the prepositions
275
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Ligüística computacional
Volumen 35, Número 2
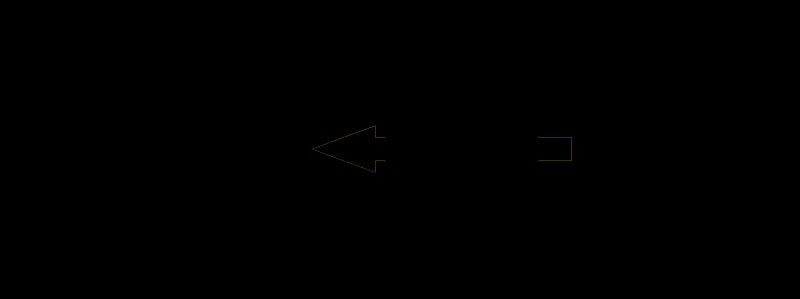
Cifra 4
The mapping performed by the spatial reasoning module from qualitative to geometric
representations during the interpretation of a locative expression.
usado. In this architecture this access is provided through the spatial reasoning compo-
próximo. Cifra 4 illustrates the translation between the qualitative, parser-generated, y
the geometric, vision subsystem–generated representations that must be performed in
order to interpret a spatial locative expression.
At different stages during a dialog the dialog manager may recognize that the
system needs to generate a response to the last input utterance. Por ejemplo, el
utterance may have been a question, such as where is x? or which x?. In such cases,
the dialog manager informs the content planner of this. The role of the content planner
is to determine the semantic content that should be included in the system’s output,
rather than the linguistic realization of this content. En efecto, the content planner may
generate a logical representation closer to the parse structure on the right of Figure 3
than to a natural language description.
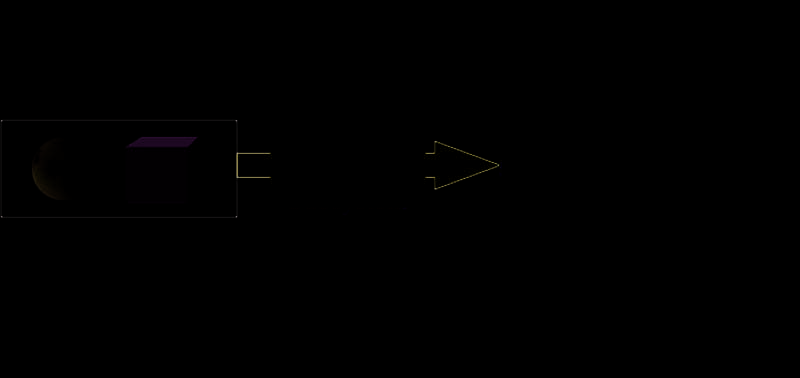
Generating referring expressions (GRE) is a key stage in content planning. GRE is
the second function in the architecture where spatial reasoning plays an important role.
The function of the GRE component is to determine the set of properties that distinguish
a particular target object from the other objects in the scene. Por ejemplo, in response
to a question such as which x? the GRE component may determine that a color and type
description is sufficient to distinguish the target object, resulting in an answer such as the
blue x being linguistically realized. Sin embargo, it may be the case that the location of the
target in the scene is the only way to distinguish it. In such cases, the GRE component
needs access to computational models of the spatial prepositions if it is to determine
which spatial relation is most suitable. Cifra 5 illustrates the translation from a geo-
metric to qualitative representation that is performed during the GRE process by the
spatial reasoning module when a locative description is being generated by the system.
Once the content planning and GRE processes have been completed, the realizer
determines a surface linguistic form in which this content can be conveyed. Finalmente, el
speech synthesis systems generate the speech output for the linguistic string created by
the realizer.
4. Psycholinguistic Data on Spatial Prepositions
Spatial reasoning is a complex activity that involves at least two levels of process-
En g: a geometric level where metric, topological, and projective properties are handled
276
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Cifra 5
The mapping performed by the spatial reasoning module from geometric to qualitative to
representations during the generation of a locative description.
(Herskovits 1986), and a functional level where the normal function of an entity affects
the spatial relationships attributed to it in a context (Coventry and Garrod 2004).
There has been much experimental work done on spatial reasoning and language.
Some of this work has focused on functional aspects of prepositional semantics (p.ej.,
Hayward and Tarr 1995; Coventry 1998; Garrod, Ferrier, and Campbell 1999), y algunos
on geometric factors (Gapp 1995; Logan and Sadler 1996; Regier and Carlson 2001). En
this article we are primarily concerned with the geometric semantics of prepositions
y, como consecuencia, our review will focus on the experimental data that addresses geo-
metric factors. We will begin by reviewing the experimental data describing topological
spatial prepositions. Following this, we will then review data relating to projective
prepositions.
Topological prepositions denote a region that is proximal to a landmark. Subse-
quently we discuss previous psycholinguistic experiments, focusing on how contex-
tual factors such as distance, tamaño, and salience may affect proximity. We also present
examples showing that the location of other objects in a scene may interfere with the
acceptability of a proximal description to locate a target relative to a landmark.
Logan and Sadler (1996) examined the semantics of several spatial prepositions. En
their experiments, a human subject was shown sentences of the form the X is [relation]
the O, each with a picture of a spatial configuration of an O in the center of an invisible
7 × 7 cell grid, and an X in one of the 48 surrounding positions. The subject then had
to rate how well the sentence described the picture, on a scale from 1 (bad) a 9 (bien).
Cifra 6 gives the mean goodness rating for the relation “near to” as a function of the
position occupied by X (Logan and Sadler 1996). It is clear from Figure 6 that ratings
diminish as the distance between X and O increases, but also that even at the extremes
of the grid the ratings were still above 1 (minimum rating).
Besides distance there are also other factors that determine the applicability of a
proximal relation. Por ejemplo, given prototypical size, the region denoted by near the
building is larger than that of near the apple. Además, an object’s salience could influence
the determination of the proximal region associated with it; as with size, the more salient
an object is the larger the proximal region associated with it (Gapp 1994).
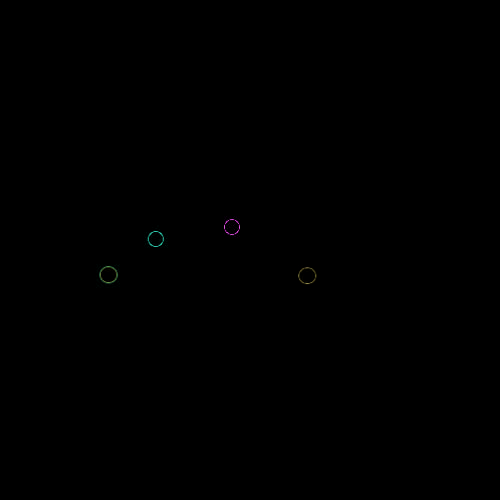
Finalmente, the two scenes in Figure 7 show interference as a contextual factor. Para el
scene on the left we can use the blue box is near the black box to describe object (C). Este
seems inappropriate in the scene on the right. Placing an object (d) beside (b) appears
277
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Ligüística computacional
Volumen 35, Número 2
Cifra 6
A 7 × 7 cell grid with mean goodness ratings for the relation the X is near O as a function of the
position occupied by X.
to interfere with the appropriateness of using a proximal relation to locate (C) relative to
(b), even though the absolute distance between (C) y (b) has not changed.
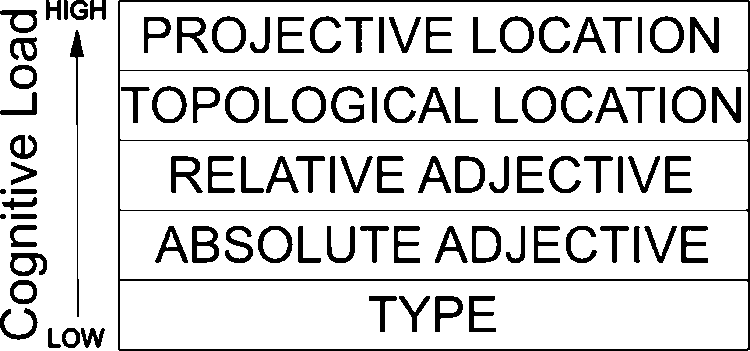
There are several important features that are evident from these data. Primero, given a
contexto, subjects have the ability to grade the applicability of a spatial relation. logan
and Sadler (1996) introduced the term spatial template to describe the representation of
the regions of acceptability associated with a preposition. A spatial template is centered
on the landmark and identifies for each point in its space the acceptability of the
spatial relationship between the landmark and the target appearing at that point being
described by the preposition. Segundo, there is empirical evidence pointing to the effects
of distance between that landmark and the target, and landmark salience and size on the
applicability of a proximity-based preposition. Finalmente, the examples presented point to
the fact that the location of other distractor objects in context may also interfere with the
applicability of a preposition. (The model of proximity we present in Section 6 captures
all these factors.)
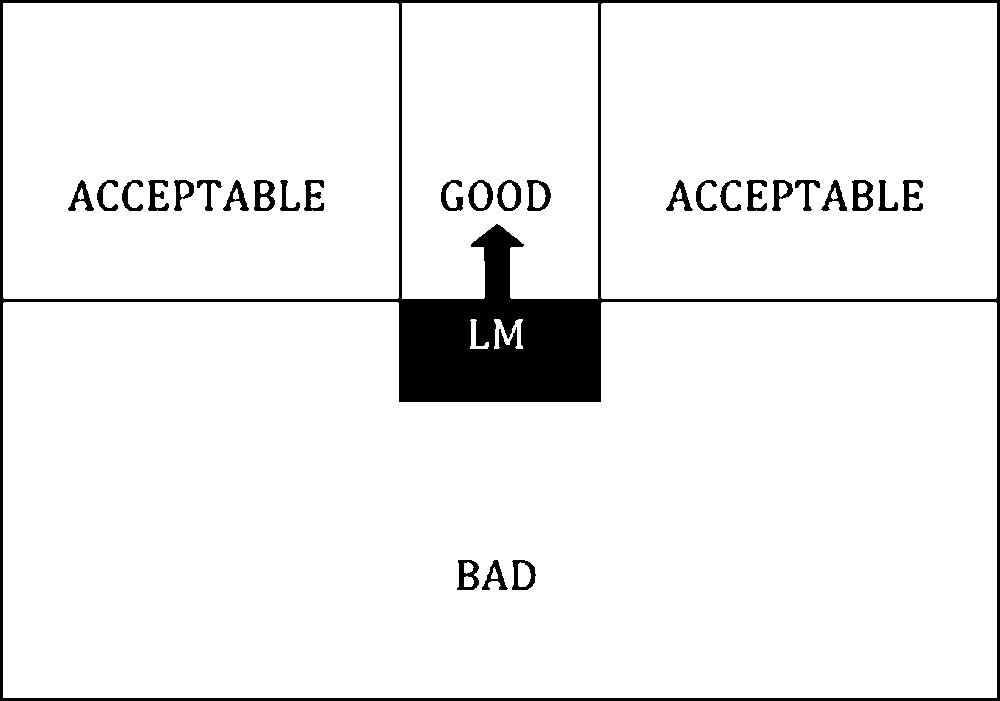
Cifra 8 is a representation of the spatial template for the projective preposition
above described in Logan and Sadler (1996). The main points of note relating to these
data are that there are three regions in the spatial template (bien, acceptable, y
bad) and these regions are symmetric around the canonical direction of the preposition
with acceptability approaching 0 as the angular deviation from the canonical direction
approaches 90 degrees. Sin embargo, it should be noted that these data were gathered dur-
ing an interpretation task and that the task may have affected the subjects’ responses.
Cifra 7
Proximity and distractor interference.
278
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Cifra 8
Spatial template for the preposition above (Logan and Sadler 1996), where LM represents the
landmark and the arrow shows the canonical direction associated with the preposition.
Although the subjects may have rated some of the areas on the far right and left of
the landmark as acceptable with respect to interpreting an utterance such as above the
landmark, this does not mean that they would use the word above to describe a target
object in these regions relative to the landmark. This highlights the fact that people may
be more accommodating when they are interpreting a locative description (Por ejemplo,
they may extend the allowable angular deviation to 90 degrees) but be more specific
when generating a locative description.
5. Previous Models of Topological and Projective Spatial Prepositions
There has been much research on the formal properties and interactions of topological
relaciones, for example Cohn et al. (1997) and Kuipers (2000). Sin embargo, before these
higher-level frameworks can be applied to real-world data, a model of proximity that
is capable of segmenting a region at the metric or geometric level is required. En
this geometric level previous approaches to modeling topological prepositions have
adopted one of two approaches to defining the region of proximity. The first is to adopt a
Voronoi segmentation of space. Under this approach the region considered as proximal
to an object is the area surrounding it that is closer to it than to any other object in the
scene. The second is to define the proximal region in terms of the size of the landmark.
Por ejemplo, Gapp (1995) defines the area of proximity as the region within ten times
the size of the landmark object in each direction. Sin embargo, neither of these approaches
consider the effect that the locations of other objects in the scene have on the proximity.
Como consecuencia, they cannot distinguish between the different context provided by the
two images in Figure 7.
Several models of projective prepositions have been proposed (Yamada 1993;
Olivier and Tsujii 1994; Gapp 1995; Fuhr et al. 1998; Regier and Carlson 2001; Kelleher
and van Genabith 2006). Yamada (1993) introduced the concept of a potential field
function to capture the gradation of applicability across the region described by the
preposition. Later work (Olivier and Tsujii 1994; Gapp 1995) highlighted the issue of
defining the intended frame of reference. Building on this work and the psycholin-
guistic results of Carlson-Radvansky and Logan (1997), Kelleher and van Genabith
279
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Ligüística computacional
Volumen 35, Número 2
(2006) developed a computational model that constructed a modified spatial template in
situations where frame of reference ambiguity occurred. Fuhr et al. (1998) used models
of prepositional semantics in order to interpret natural language commands to a robotic
arm. Fuhr et al. segmented the space around an object into different regions based
on the sides and vertices of the object’s bounding box. One of the drawbacks of this
sistema, sin embargo, was that it could not distinguish between the position of two or more
objects that were fully enclosed within a given region. Finalmente, Regier and Carlson (2001)
developed a vector sum algorithm to compute the applicability of a projective relation
between a landmark and a target. Sin embargo, as with previous topological models, ninguno
of these models consider the influence of other objects in the context of the landmark
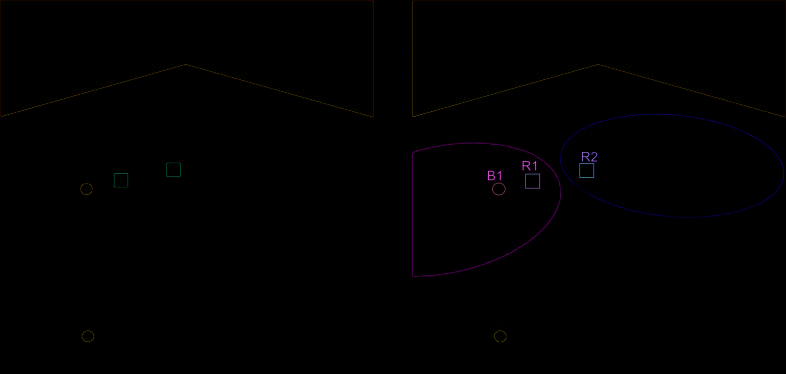
target relationship. Por ejemplo, the introduction of the long black object into image
2 En figura 9 affects the interpretability of a reference such as the blue square above the
white rectangle. In the next section we describe new models designed to account for the
influence of other objects in the semantics of spatial prepositions.
6. Models of Visual Context in Topological and Projective Spatial Prepositions
If a computational model is going to accommodate the gradation of applicability across
a preposition’s spatial template it must define the semantics of the preposition as
some sort of continuum function. A potential field model is one form of continuum
measure that is widely used (Yamada 1993; Gapp 1994; Olivier and Tsujii 1994; Regier
and Carlson 2001). Using this approach, a model of a preposition’s spatial template
is constructed using a set of normalized equations that, for a given origin and point,
computes a value that represents the cost of accepting that point as the interpretation of
the preposition.
Each equation used to construct the potential field representation of a preposition’s
spatial template models a different geometric constraint specified by the preposition’s
semantics. Por ejemplo, for topological prepositions such as near, an equation inversely
proportional to the distance between a point and a landmark would be used, mientras
for projective prepositions such as to the right of, an equation modeling the angular de-
viation of a point from the idealized direction denoted by the preposition would be in-
cluded in the construction set; Gapp (1995) and Logan and Sadler (1996) both noted that
acceptability of a projective preposition being used to describe a location approaches
0 as the angular deviation of that location approaches 90 degrees. The potential field
is then constructed by assigning each point in the field an overall potential by inte-
grating the results computed for that point by each of the equations in the construc-
tion set.
Cifra 9
Projective prepositions and distractor interference.
280
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
This potential field approach does not, sin embargo, account for the influence of other
objects in the visual scene on the semantics of a topological or projective preposition.
The basic idea in our computational models is to extend the potential field approach by
overlaying the potential fields for each object in a visual scene and combining those
fields to produce relative potential fields for topological or projective prepositions.
These relative potential fields represent the semantics of those prepositions as modified
by the presence of other objects in the visual scene.
6.1 Computational Model of Topological Prepositions
In this section we describe a model of relative proximity that uses (1) the distance
between objects, (2) the size and salience of the landmark object, y (3) the location
of other objects in the scene. Our model is based on first computing absolute proximity
between each point and each landmark in a scene, and then combining or overlaying
the resulting absolute proximity fields to compute the relative proximity of each point
to each landmark.
6.1.1 Computing Absolute Proximity Fields. We first compute for each landmark an ab-
solute proximity field giving each point’s proximity to that landmark, independent of
proximity to any other landmark. We compute fields on the projection of the scene onto
the 2D-plane, represented as a 2D-array of points. At each point P in that array, el
absolute proximity for landmark L is
proxabs(l, PAG) = (1 − distnormalized(l, PAG)) ∗ salience(l)
(1)
In this equation the absolute proximity for a point P and a landmark L is a function of
both the distance between the point and the location of the landmark, and the salience
of the landmark.
To represent distance we use a normalized distance function distnormalized(l, PAG),
which returns a value between 0 y 1.5 The smaller the distance between L and P,
the higher the absolute proximity value returned, eso es, the more acceptable it is to say
that P is close to L. In this way, this component of the absolute proximity field captures
the gradual gradation in applicability evident in Logan and Sadler (1996).
We model the influence of visual and discourse salience on absolute proximity as
a function salience(l), returning a value between 0 y 1 that represents the relative
salience of the landmark L in the scene (Ecuación (2)). For the current purposes we
assume that the relative salience of an object is the average of its visual salience (Svis)
and discourse salience (Sdisc).6
prominencia(l) = (Svis(l) + Sdisc(l))/2
(2)
5 We normalize by computing the distance between the two points, and then dividing this distance by the
maximum distance between point L and any point in the scene.
6 Hay, por supuesto, many other operators that could be used to combine visual and linguistic salience,
such as maximum (MAX(Svis(l), Sdisc(l))) or probabilistic OR (Svis(l) + Sdisc(l) − (Svis(l) × Sdisc(l))).
We currently have no way of deciding among these operators. Fortunately, sin embargo, the modular nature
of our framework would allow us to change the computation of relative salience without impacting other
aspects of our model, should evidence in favor of one or other operator become available.
281
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Ligüística computacional
Volumen 35, Número 2
Visual salience Svis is computed using the algorithm of Kelleher and van Genabith
(2004). Computing a relative salience for each object in a scene is based on its perceivable
size and its centrality relative to the viewer’s focus of attention. The algorithm returns
scores in the range of 0 a 1. As the algorithm captures object size, we can model
the effect of landmark size on proximity through the salience component of absolute
proximity. The discourse salience (Sdisc) of an object is computed based on recency of
mencionar (Hajicov´a 1993) except we represent the maximum overall salience in the scene
como 1, and use 0 to indicate that the landmark is not salient in the current context.
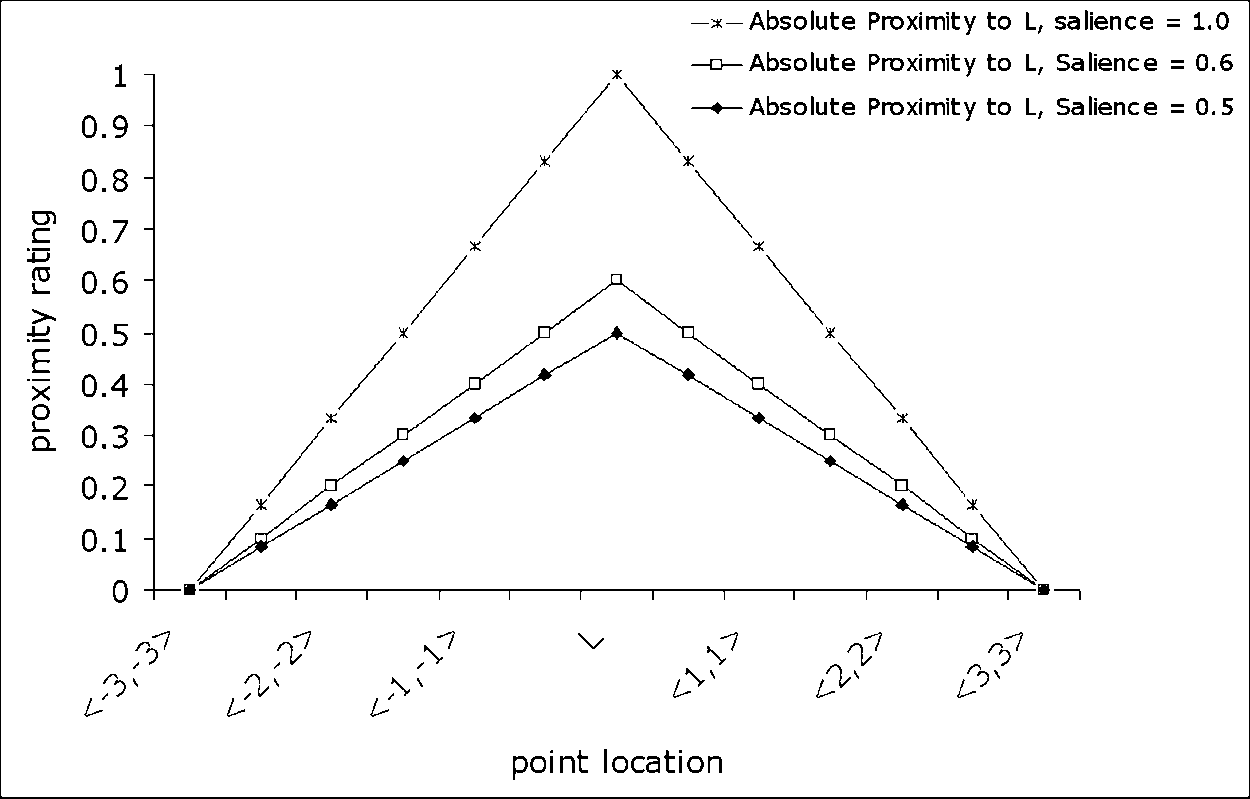
Cifra 10 shows computed absolute proximity with salience values of 1, 0.6, y
0.5, for points from the upper-left to the lower-right of a 2D plane, with the landmark
at the center of that plane. The graph shows how salience influences absolute proximity
in our model: For a landmark with high salience, points far from the landmark can still
have high absolute proximity to it.
6.1.2 Computing Relative Proximity Fields. Once we have constructed absolute proximity
fields for the landmarks in a scene, our next step is to overlay these fields to produce a
measure of relative proximity to each landmark at each point. For this we first select
a landmark, and then iterate over each point in the scene comparing the absolute
proximity of the selected landmark at that point with the absolute proximity of all other
landmarks at that point. The relative proximity of a selected landmark at a point is
equal to the absolute proximity field for that landmark at that point, minus the highest
absolute proximity field for any other landmark at that point:
proxrel(PAG, l) = proxabs(PAG, l) − MAX
∀LX(cid:2)=L
proxabs(PAG, LX)
(3)
The idea here is that the other landmark with the highest absolute proximity is acting
in competition with the selected landmark. If that other landmark’s absolute proximity
Cifra 10
Absolute proximity ratings for landmark L centered in a 2D plane, points ranging from plane’s
upper-left corner ((cid:4)−3,−3(cid:5)) to lower right corner ((cid:4)3,3(cid:5)).
282
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
is higher than the absolute proximity of the selected landmark, the selected landmark’s
relative proximity for the point will be negative. If the competing landmark’s absolute
proximity is slightly lower than the absolute proximity of the selected landmark, el
selected landmark’s relative proximity for the point will be positive, but low. Only when
the competing landmark’s absolute proximity is significantly lower than the absolute
proximity of the selected landmark will the selected landmark have a high relative
proximity for the point in question.
In Equation (3) the proximity of a given point to a selected landmark rises as
that point’s distance from the landmark decreases (the closer the point is to the land-
mark, the higher its proximity score for the landmark will be), but falls as that point’s
distance from some other landmark decreases (the closer the point is to some other
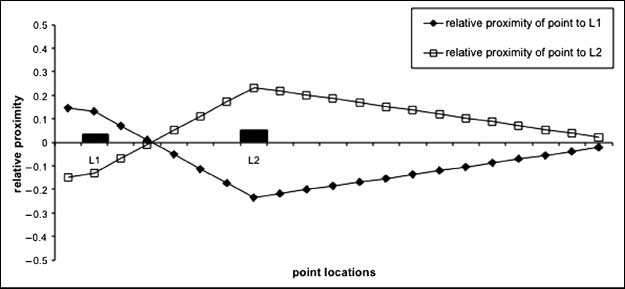
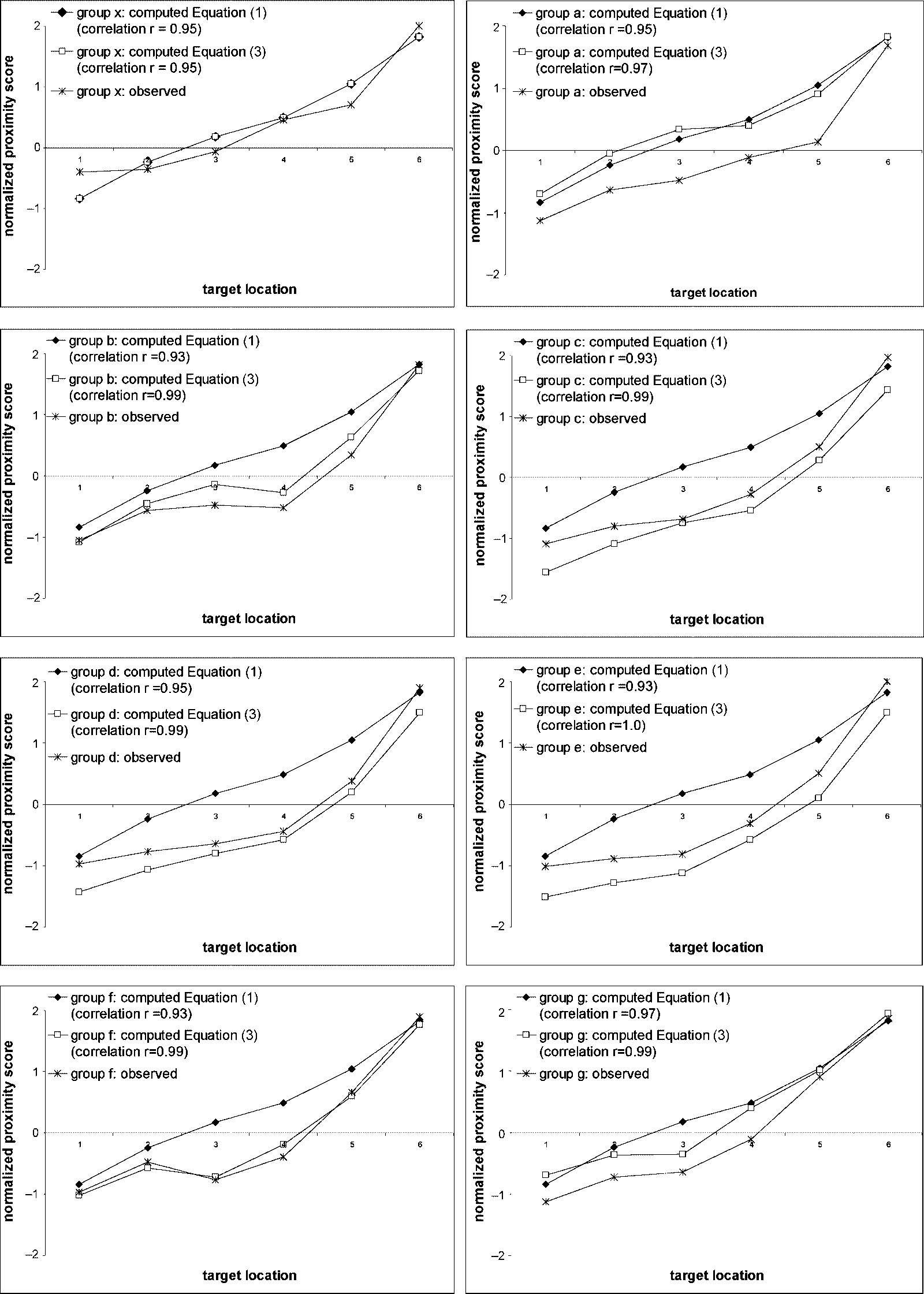
landmark, the lower its proximity score for the selected landmark will be). Cifra 11
shows the relative proximity fields of two landmarks, L1 and L2, computed using
Ecuación (3) in a 1-dimensional (linear) espacio. The two landmarks have different de-
grees of salience: a salience of 0.5 for L1 and of 0.6 for L2 (represented by the different
sizes of the landmarks). In this figure, any point where the relative proximity for one
particular landmark is above the zero line represents a point which is proximal to
that landmark, rather than to the other landmark. The extent to which that point is
above zero represents its degree of proximity to that landmark. The overall proximal
area for a given landmark is the overall area for which its relative proximity field is
above zero. The left and right borders of the figure represent the boundaries (walls) de
the area.
Cifra 11 illustrates three main points. Primero, the overall size of a landmark’s prox-
imal area is a function of the landmark’s position relative to the other landmark and
to the boundaries. Por ejemplo, landmark L2 has a large open space between it and
the right boundary: Most of this space falls into the proximal area for that landmark.
Landmark L1 falls into quite a narrow space between the left boundary and L2. L1
thus has a much smaller proximal area in the figure than L2. Segundo, the relative
proximity field for a landmark is a function of that landmark’s salience. This can be
seen in Figure 11 by considering the space between the two landmarks. In that space
the width of the proximal area for L2 is greater than that of L1, because L2 is more
salient.
Cifra 11
Graph of relative proximity fields for two landmarks L1 and L2. Relative proximity fields were
computed with salience scores of 0.5 for L1 and 0.6 for L2.
283
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Ligüística computacional
Volumen 35, Número 2
Cifra 12
Example scene.
The third point concerns areas of ambiguous proximity in Figure 11: areas in which
neither of the landmarks have a significantly higher relative proximity than the other.
There are two such areas in the Figure. The first is between the two landmarks, en
the region where one relative proximity field line crosses the other. These points are
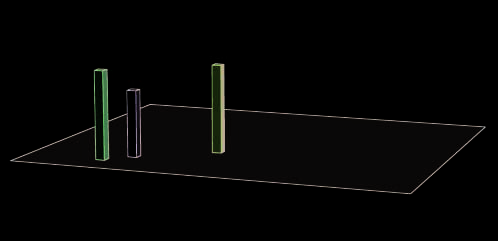
ambiguous in terms of relative proximity because these points are equidistant from
those two landmarks. The second ambiguous area is at the extreme right of the space
como se muestra en la figura 11. This area is ambiguous because this area is distant from both
landmarks: Points in this area would not be judged proximal to either landmark. El
question of ambiguity in relative proximity judgments is considered in more detail in
Sección 8.1.
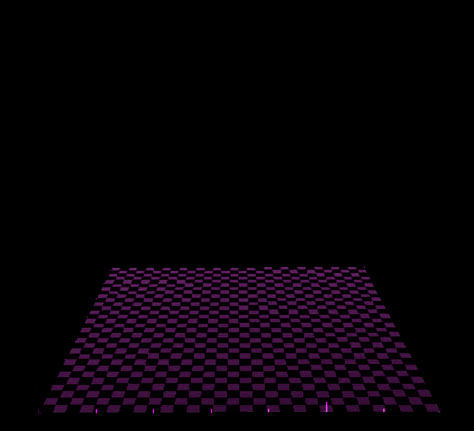
We will illustrate the different stages of the proximity model using the situation
illustrated in Figure 12. The task is to decide whether the target object is proximal to
the landmark object. Cifra 13 illustrates the absolute potential field for the landmark
Cifra 13
The absolute proximity fields for the landmark.
284
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Kelleher and Costello
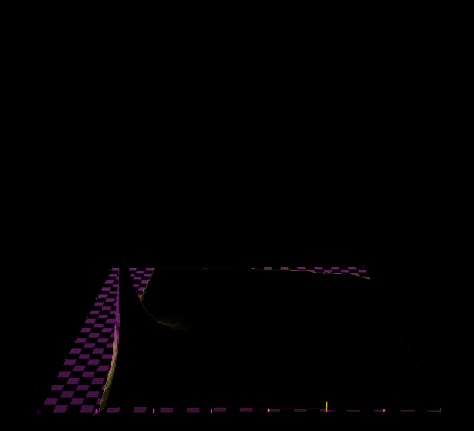
Computational Models of Spatial Prepositions for VSD
Cifra 14
The absolute proximity fields for the landmark and the distractor.
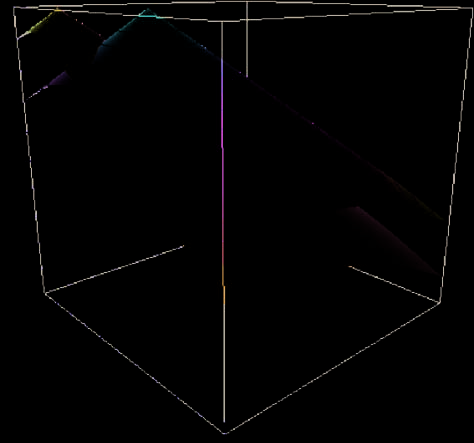
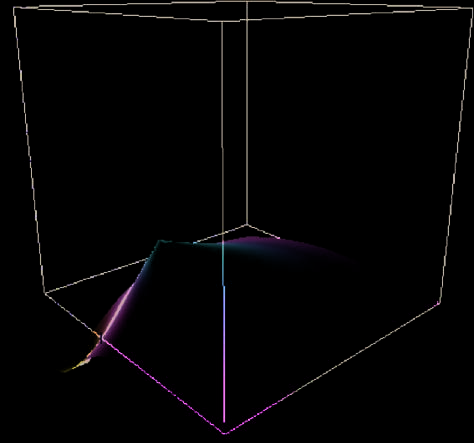
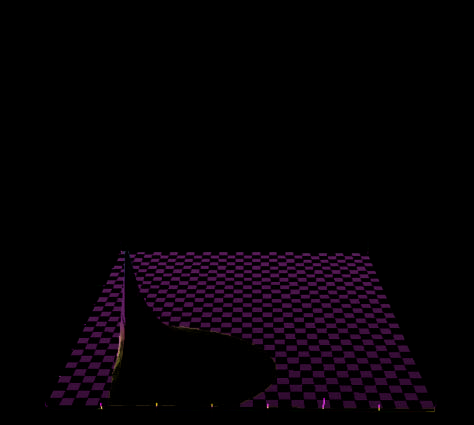
object. Cifra 14 illustrates the absolute potential fields for the landmark and the
distractor object. Cifra 15 illustrates the relative proximity field that results from the
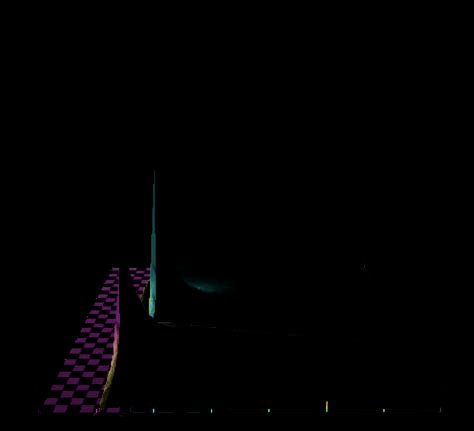
interaction between the landmark and distractors absolute proximity fields. Cifra 16
illustrates the application of the threshold to the landmark’s relative proximity field. Si
the target object is located in the region where the landmark’s relative proximity field
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
285
Cifra 15
The landmark’s relative proximity field.
Ligüística computacional
Volumen 35, Número 2
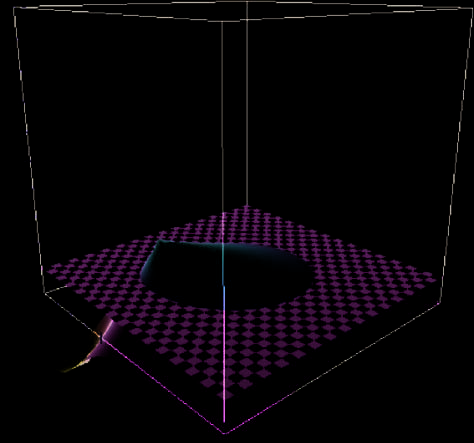
Cifra 16
Applying the threshold to the landmark’s relative proximity field.
is above the threshold the target is deemed to be proximal to the landmark. Cifra 16
demonstrates the contextual influence which the distractor object has on the landmark’s
relative proximity field: The field shrinks on the side of the landmark near the distractor,
but expands on the side away from the landmark.
6.2 Computational Model of Projective Prepositions
The two main factors that impact on the applicability of a projective preposition de-
scribing the spatial relationship between a target object and a landmark are the angular
deviation of the target object’s position from the canonical direction described by the
preposition relative to the landmark and the distance of the target object from the
landmark.
The vector originating from the center of the landmark to the viewer’s position
describes the canonical search axis for in front of. We can produce the search vectors
for the other projective prepositions (behind, izquierda, bien) by rotating this front vector on a
horizontal plane. Once the canonical vector (cid:1)c for a given projective preposition has been
selected, the angular deviation of a given point P position relative to the landmark L can
be computed using Equation (4):
angle( (cid:1)LP,(cid:1)C ) = cos
−1
(cid:1)LP • (cid:1)C
(cid:3)
(cid:3)
(cid:3)
(cid:3)
(cid:3) (cid:1)LP
(cid:3) |(cid:1)C |
(4)
dónde (cid:1)LP is the vector from landmark L to point P and (cid:1)c is the canonical vector for the
projective preposition in question. This equation gives the angle between (cid:1)LP and that
canonical vector.
286
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Using this equation, and the normalized distance measure described in Section 6.1,
we define an absolute potential field for the acceptability of a projective preposition
with canonical vector (cid:1)c for landmark L as follows:
projabs(l, PAG,(cid:1)C ) = 0 si (angle( (cid:1)LP,(cid:1)C ) > 90)o(distnormalized(l, PAG) = 0),
= (angle( (cid:1)LP,(cid:1)C )/distnormalized(l, PAG)) de lo contrario
(5)
In this equation, if the angle between a point P and the canonical vector (cid:1)c is greater than
90 degrees, or if the distance between the landmark and the point is 0, the acceptability
of that point for the projective preposition is 0. De lo contrario, the acceptability of that
point is equal to the angle between that point and the canonical vector, divided by the
normalized distance between that point and the landmark.
We use this absolute potential field for projective prepositions in the same way
that we used the absolute field for proximity in our model of topological prepositions.
Once we have computed the absolute potential field for each point relative to the
landmark we then do the same process for each of the distractor landmarks. Nosotros
then overlay the landmark applicabilities with those of the distractors by subtracting
the maximum applicability of any of the distractors at a point from the landmark’s
applicability at that point, producing a relative potential field for the projective prepo-
sition as in Equation (6):
projrel(PAG, l,(cid:1)C ) = projabs(PAG, l(cid:1)C ) − MAX
∀LX(cid:2)=L
projabs(PAG, LX,(cid:1)C )
(6)
We then apply a threshold, and the region above this threshold is taken to define
the area described by the projective preposition. Note that we can use Equation (6) a
compute relative potential fields for various different projective prepositions (in front of,
behind, izquierda, bien, arriba, abajo) by selecting the different canonical vectors corresponding
to those prepositions.
Figures 17 a través de 20 illustrate the different stages in this process. In these images
the origin is at the front right corner, the x-axis runs from right to left, the y-axis
from front to back, and the z-axis is the vertical. The higher the z-axis value the more
applicability the preposition. Cifra 17 defines the baseline applicability of z = 0.1. Nosotros
use this baseline because dividing an angular deviation by distance will never result in
a zero value; rather applicability will approach 0 asymptotically. The baseline provides
a cut-off point for applicability. Cifra 18 illustrates the potential field computed for
right of a landmark positioned at x = 100, y = 200, z = 0 with a search axis of x = 1,
y = 0. Cifra 19 illustrates the potential fields computed for right of the landmark and
a distractor object positioned at x = 150, y = 400, z = 0. Finalmente, Cifra 20 illustrates the
potential field that results for right of the landmark when the distractor potential field is
subtracted from it. Cifra 20 demonstrates the contextual influence which the distractor
object has on the landmark’s relative potential field for the preposition: the size of the
field is reduced by the presence of the distractor object.
7. Psycholinguistic Evaluations of Our Models
We now describe an experiment which tests our approach to relative proximity by
examining the changes in people’s judgments of the appropriateness of the expression
near being used to describe the relationship between a target and landmark object in
287
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Ligüística computacional
Volumen 35, Número 2
Cifra 17
A baseline applicability is set to z = 0.1.
an image where a distractor object is present. All objects in these images were colored
shapes: circles, triangles, or squares.
7.1 Materials and Procedure
All images used in this experiment contained a central landmark object and a target
object, usually with a third distractor object. The landmark was always placed in the
Cifra 18
The potential field describing the absolute applicability model for right of the landmark.
288
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Cifra 19
The potential fields describing the absolute applicability model for right of the landmark and
right of a distractor object.
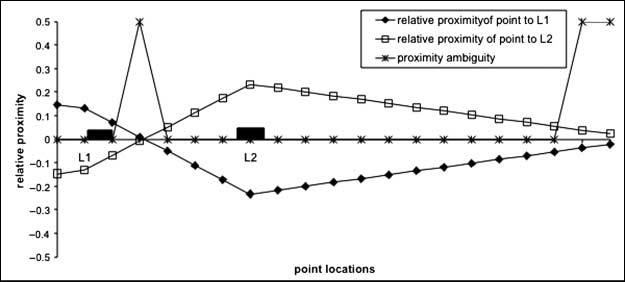
middle of a 7 × 7 grid. Images were divided into eight groups of six images each. Cada
image in a group contained the target object placed in one of six different cells on the
grid, numbered from 1 a 6. Cifra 21 shows how we number these target positions
according to their nearness to the landmark.
Groups are organized according to the presence and position of a distractor object.
In group a the distractor is directly above the landmark, in group b the distractor is
Cifra 20
The resulting potential field for right of the landmark with the baseline applied to it.
289
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
/
C
oh
yo
i
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
C
oh
yo
i
.
0
6
–
7
8
–
pag
r
mi
pag
1
4
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
8
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Ligüística computacional
Volumen 35, Número 2
Cifra 21
Relative locations of landmark (l) target positions (1. . . 6) and distractor landmark positions
(a. . . gramo) in images used in the experiment.
rotated 45 degrees clockwise from the vertical, in group c it is directly to the right of
the landmark, in d it is rotated 135 degrees clockwise from the vertical, etcétera. El
distractor object is always the same distance from the central landmark. Además de
the distractor groups a,b,C,d,mi,F, and g, there is an eighth group, group x, in which no
distractor object occurs.
In the experiment, each image was displayed with a sentence of the form The
is near the
, with a description of the target and landmark, respectivamente. The sentence
was presented under the image. Twelve participants took part in this experiment. Todo
participants were native English speakers and all volunteered to take part. Participantes
were not linguists and were naive to the formal interpretation of spatial prepositions
and to the hypotheses being tested in the experiment. Participants were asked to rate
the acceptability of the sentence as a description of the image using a 10-point scale,
with zero denoting not acceptable at all; 4 o 5 denoting moderately acceptable; y 9
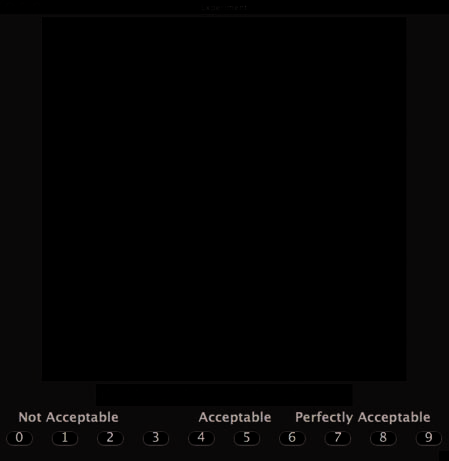
perfectly acceptable. Cifra 22 illustrates a trial from the experiment. Each participant
rated every image in the experiment. Images were presented in random order to control
for learning effects.
7.2 Results and Discussion
There was significant agreement between participants across all 48 images. el promedio
pair-wise correlation between participants’ responses was r = 0.68. There was a signifi-
cant correlation of responses between every pair of participants (pag < 0.01 for all pairs).
We assess participants’ responses by comparing their average proximity judgments
with those predicted by the absolute proximity equation (Equation (1)), and by the
relative proximity equation (Equation (3)). For both equations we assume that all objects
have a salience score of 1. With salience equal to 1, the absolute proximity equation
relates proximity between target and landmark objects to the distance between those
two objects, so that the closer the target is to the landmark the higher its proximity will
be. With salience equal to 1, the relative proximity equation relates proximity to both
distance between target and landmark and distance between target and distractor, so
290
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Figure 22
An example trial from the proximity experiment.
that the proximity of a given target object to a landmark rises as that target’s distance
from the landmark decreases but falls as the target’s distance from some other distractor
object decreases. It should be noted that proximity scores in both Equations (1) and
(3) are multiplied by a constant salience and that the evaluations we describe below
(correlation, multiple regression) factor out multiplication by a constant. Consequently,
choosing a particular value for salience does not affect our evaluation results.
In analyzing our results we are comparing our basic equation for absolute proximity
(Equation (1), in which proximity falls with increasing distance between target and
landmark) with the “relative proximity” extension of this equation (Equation (3), in
which proximity falls with increasing distance between target and landmark, but rises
with distance to distractor). Because both equations are quite similar (both are based on
target–landmark distance, which is obviously the prime factor in proximity judgments),
we expect both equations to produce quite similar responses. We expect, however, that
the relative proximity equations will produce responses which are reliably closer to
people’s proximity judgments than those produced by the absolute proximity equation.
We initially used Spearman’s rank-order correlation to compare people’s average
proximity scores with those produced by Equation (1) (absolute proximity) and Equa-
tion (3) (relative proximity) for each group. For each group this analysis replaces each
proximity score with its rank within that group, and then compares the ranks. Where
the ranks returned by an equation and the ranks from participants’ average proximity
scores are identical, the correlation will be 1.0; where the ranks differ, the correlation
will drop. For the absolute proximity equation, the correlation was 1.0 in six of the
groups, and .94 in the two remaining groups (group c and group g). For the relative
proximity equation, the Spearman’s rank-order correlation with people’s responses was
1.0 in each of the eight groups. The fact that the relative proximity equation has a rank-
order correlation of 1.0 in all groups while the absolute proximity equation fails to reach
1.0 in two groups (predicting proximity-ranks incorrectly in those two groups) suggests
291
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Computational Linguistics
Volume 35, Number 2
that the relative-proximity equation is a better model of people’s proximity responses.
However, the fact that there are so many correlations of 1.0 means that Spearman’s rank-
order correlation is not particularly useful in distinguishing between the two equations.
We therefore use Pearson’s product-moment correlation to compare people’s average
proximity scores with those produced by the absolute and relative proximity equations.
Rather than comparing ranks, this analysis compares actual proximity values.
Figure 23 shows the product-moment correlations between people’s average prox-
imity ratings and those produced by Equation (1) (absolute proximity) and by Equa-
tion (3) (relative proximity) for the eight groups in the experiment. In analyzing these
correlations we had two concerns: first, to see whether, for each individual group, the
correlation produced by Equation (3) was reliably different from that produced by
Equation (1); and second, to see whether across all the groups, the correlation produced
by Equation (3) was reliably higher than that produced by Equation (1). In regard
to the first question, we did not expect there to be particularly large differences in
correlation between the two equations, because both are based on target–landmark
distance. Because we know target–landmark distance to be a good predictor of people’s
proximity judgments we expected Equation (1) to have a high correlation with people’s
proximity judgments, and we expected Equation (3) to improve on that correlation.
However, because the correlation from Equation (1) was already high, any improvement
in correlation from Equation (3) would be relatively small. Indeed this is what is seen
across the seven groups of interest: The average correlation from Equation (1) is high
(average 0.93), the average correlation from Equation (3) is higher (average 0.99), but
the difference between the two correlations is relatively small. Using Fisher’s technique
for comparing correlation coefficients we find no reliable difference between correlation
coefficients in any group.
Given that the correlations for both Equations (1) and (3) are high we examined
whether the results returned by Equation (3) were reliably closer to human judgments
than those from Equation (1). For the 42 images where a distractor object was present we
recorded which equation gave a result that was closer to the participants’ normalized
average for that image. In 28 cases Equation (3) was closer, and in 14 Equation (1) was
closer (a 2:1 advantage for Equation (3), significant in a sign test: n+ = 28, n− = 14, Z =
2.2, p < 0.05). We conclude that proximity judgments for objects in our experiment
are best represented by relative proximity as computed in Equation (3). These results
support our “relative” model of proximity.7
In addition to these analyses, we also carried out a multiple regression analysis of
participants’ responses in the experiment, with target–landmark distance and target–
distractor distance as the predictor variables, and participant response as the depen-
dent variable. Because our experiment involved repeated-measures data, we followed
the procedure for regression analysis of repeated-measures data described by Lorch
and Myers (1990). This involves computing individual multiple regression for each
participant in our experiment, and then using a t-test to analyze the regression coef-
ficients produced for target–distractor distance and target–landmark distance in those
equations, across all participants. Recall that in our relative proximity equation (Equa-
tion (3)) target–landmark distance had a negative coefficient (as target–landmark dis-
tance increased, judgments of target–landmark proximity fell) whereas target–distractor
7 Note that, in order to display the relationship between proximity values given by participants, computed
in Equation (1), and computed in Equation (3), the values displayed in Figure 23 are normalized so that
proximity values have a mean of 0 and a standard deviation of 1. This normalization simply means that
all values fall in the same region of the scale, and can be easily compared visually.
292
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
293
Figure 23
Comparison between normalized proximity scores observed and computed for each group.
Computational Linguistics
Volume 35, Number 2
distance had a positive coefficient (as target–distractor distance increased, judgments
of target–landmark proximity increased). Our prediction, therefore, is that across these
multiple regression analyses of participants’ responses, the target–landmark distance
variable will reliably have a negative coefficient, whereas the target–distractor variable
will reliably have a positive coefficient.
Table 1 shows the regression coefficients obtained for the target–landmark distance
variable and the target–distractor distance variable, across the 12 participants in our
experiment. As this table shows, the regression coefficient for target–landmark distance
was significantly more likely to be negative (as predicted) whereas the regression
coefficient for target–distractor distance was significantly more likely to be positive
(again, as predicted). A single-group t-test showed that both target–landmark regres-
sion coefficients and target–distractor regression coefficients reliably differed from zero
(t(11) = −8.64, p < 0.01; t(11) = 2.23, p < 0.05) indicating that both of these predictor
variables had a significant and reliable effect on participants’ responses in the exper-
iment. There was no concern about collinearity between predictor variables in these
regression analyses, as the correlation between those variables (r = 0.38, %var = 0.14)
was much lower than that between the predictor variables and the dependent variable
(r = 0.93 or higher). Together these regression results, the sign-test results, and the
comparative correlations described earlier all support the model of relative proximity
as described in Equation (3).
8. Applications of the Models
The model of proximity presented here has been implemented and used as a compo-
nent in a human–robot dialog system (Kelleher and Kruijff 2006; Kelleher, Kruijff, and
Costello 2006). The proximity and projective models have also been integrated into the
LIVE virtual environment (Kelleher, Costello, and van Genabith 2005). In this section
we will describe how the models are used in these systems to interpret and generate
locative expressions.
Table 1
Regression coefficients from individual analyses of subjects data in proximity experiment.
participant
target–landmark distance
target–distractor distance
−2.02
−1.53
−3.06
−2.45
−2.23
−0.97
−3.09
−1.78
−0.80
−1.48
−3.29
−3.29
−2.17
0.88
−8.64*
1
2
3
4
5
6
7
8
9
10
11
12
M
SE
t
*p < 0.01, **p < 0.05.
294
0.27
0.09
0.03
−0.02
0.06
0.32
0.42
0.02
0.16
−0.24
0.01
0.44
0.13
0.20
2.23**
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
8.1 Interpreting Spatial References
We use the computational models of Section 6 to interpret spatial references to objects.
In this section we illustrate how we use our model of relative proximity to ground the
interpretation of a locative expression containing a topological preposition. Returning
to the architecture described in Section 3, the basic steps triggering the interpretation
of a locative are: (1) the user utters a command, such as pick up the ball near the red box,
(2) the speech recognition module processes the speech signal and passes the resulting
string to the parser, (3) the parser constructs a formal representation of the meaning of
the utterance, (4) the dialog manager categorizes the utterance to be a command and,
also, recognizes the need to resolve the referring expression the ball near the red box. At
this point the reference resolution module is triggered.
The first stage in reference resolution is to retrieve the context against which the
reference is to be resolved. This involves accessing the context model and retrieving
the set of currently accessible objects. This set is then subdivided into the set of objects
fulfilling the landmark description, the set of objects fulfilling the description of the
target object, and the set of objects fulfilling neither description.
For each candidate landmark and each object that is neither a candidate landmark
nor a candidate target we compute an absolute proximity field. For each landmark we
convert its absolute proximity field into a relative proximity field by overlaying the
absolute proximity fields of the other landmarks and the other objects in the context
that are neither candidate landmarks nor target objects. For this we iterate over each
point in the scene, and compare the competing absolute proximity scores at each point.
If the primary landmark’s (i.e., the landmark with the highest relative proximity at the
point) relative proximity exceeds the next highest relative proximity score at a given
point by more than a predefined confidence interval, the point is in the proximity region
anchored around the primary landmark. Otherwise, we take it as ambiguous and not in
the proximal region that is being interpreted. The motivation for the confidence interval
is to capture situations where the difference in relative proximity scores between the
primary landmark and one or more landmarks at a given point is relatively small.
Figure 24 illustrates the parsing of a scene into the regions “near” two landmarks. The
relative proximity fields of the two landmarks are identical to those in Figure 11, using a
confidence interval of 0.1. Ambiguous points are where the proximity ambiguity series
is plotted at 0.5. The regions “near” each landmark are those areas of the graph where
each landmark’s relative proximity series is the highest plot on the graph.
Figure 24 illustrates an important aspect of our model: the comparison of relative
proximity fields naturally defines the extent of vague proximal regions. For example,
see the region right of L2 in Figure 24. The extent of L2’s proximal region in this
direction is bounded by the interference effect of L1’s relative proximity field. Because
the landmarks’ relative proximity scores converge, the area on the far right of the image
is ambiguous with respect to which landmark it is proximal to. In effect, the model
captures the fact that the area is relatively distant from both landmarks. In Section 8.2
we describe a cognitive load hierarchy of prepositions and how we use this to generate
locative expressions. Following this hierarchy, objects located in the area on the far right
of the image should be described with a projective relation such as to the right of L2
rather than a proximal relation like near L2.
8.1.1 An Example. To illustrate the model further we will apply the model to a real scene.
Figure 25 shows a real scene on the left-hand side, and a rendering of the scene analysis
on the right-hand side. For the shown scene analysis we have assumed all objects to
295
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Computational Linguistics
Volume 35, Number 2
Figure 24
Graph of ambiguous regions overlaid on relative proximity fields for landmarks L1 and L2,
with confidence interval = 0.1 and different salience scores for L1 (0.5) and L2 (0.6). Locations
of landmarks are marked on the x-axis.
have an equal salience: on the left, the blue ball; in the middle, the red ball; and on
the right, the green ball. As the analysis correctly shows, each object has a proximity
potential field (shown in its own color) but, due to interference between potential
fields, we see that proximity is usually ambiguous between at least two landmarks.
The regions that are ambiguous between two landmarks are colored using a mixture of
the colors. The white area denotes the regions defined as being ambiguous between the
three objects.
Imagine we now place a second blue ball in the scene and the user inputs the
command pick up the blue ball near the red ball. As explained previously, when the system
starts interpreting this reference it will split the context into a set of candidate target
objects, consisting of the two blue balls in the scene, the set of candidate landmarks,
consisting of the one red ball, and the set of remaining objects, the green ball. It will
then compute proximity fields for each of the candidate landmarks and the other objects
in the scene that are not candidate targets. It will then overlay these proximity fields
Figure 25
Scene analysis.
296
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
to compute the relative proximity fields around each landmark. Figure 26 illustrates
the resulting proximity fields. As can be seen from the image the original blue ball is
inside the red ball’s proximity field and consequently it will be selected as the ball to be
picked up.
This analysis highlights two important aspects of the model. First, we can observe
an interference effect between the red ball and the green ball: The potential field repre-
senting proximity to the red ball forms an ellipsoid, being inhibited to the right through
interference with the potential field of the green ball. Second, the proximity field of
the red ball is much larger then that of the green ball; this is due to the relatively high
linguistic salience of the red ball compared to the green ball due to it being mentioned
in the reference.
8.2 Generating References
In this section we illustrate how we use our models of the semantics of spatial preposi-
tions to guide the generation of a locative expression in visual situated contexts.
In the architecture described earlier, the GRE component is triggered by the content
manager. Similar to reference resolution, GRE will first retrieve the context from the
context model and generate the reference relative to this context. If a locative expression
is necessary the GRE component has three things to decide: (1) what properties of the
target object to include, (2) which object in the scene should be used as a landmark and
how should that be described, and (3) which spatial relation to use (and hence which
preposition to use).
Several GRE algorithms have addressed the issue of generating locative expressions
(Dale and Haddock 1991; Horacek 1997; Gardent 2002; Krahmer and Theune 2002;
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
297
Figure 26
Interpreting the blue ball near the red ball.
Computational Linguistics
Volume 35, Number 2
Varges 2004). However, all these algorithms assume the GRE component has access to
a predefined scene model that defines all the spatial relations between all the entities
in the scene. For many visually situated dialog systems, in particular robotic dialog
systems, this assumption is a serious drawback for these algorithms. If an agent wishes
to generate a contextually appropriate reference it cannot assume the availability of
a domain model, rather it must dynamically construct one. Moreover, constructing a
model containing all the spatial relationships between all the entities in the domain
is prone to combinatorial explosion, both in terms of the number of objects in the
context (the location of each object in the scene must be checked against all the other
objects in the scene) and number of inter-object spatial relations (as a greater number
of spatial relations will require a greater number of comparisons between each pair
of objects). Furthermore, the context-free a priori construction of such an exhaustive
scene model is cognitively implausible. Psychological research indicates that spatial
relations are not preattentively perceptually available (Treisman and Gormican 1988).
Rather, their perception requires attention (Logan 1994, 1995). These findings point to
subjects constructing contextually dependent reduced relational scene models, rather
than an exhaustive context-free model.
The approach we adopt to generating locative expressions addresses the issue of
combinatorial explosion inherent in relational scene model construction by incremen-
tally creating a series of reduced scene models. Within each scene model only one
spatial relation is considered and only a subset of objects are considered as candidate
landmarks. This reduces both the number of relations that must be computed over each
object pair and the number of object pairs. The decision as to which relations should be
included in each scene model is guided by a cognitively-motivated hierarchy of spatial
relations. The set of candidate landmarks in a given scene is dependent on the set of
objects in the scene that fulfill the description of the target object and the semantic relation
that is being considered.
We use Dale and Reiter’s (1995) incremental GRE algorithm as the starting point
for the generation framework. The incremental algorithm iterates through the proper-
ties of the target object and for each property computes the set of distractor objects for
which the conjunction of the properties selected so far, and the current property, hold. A
property is added to the list of selected properties if it reduces the size of the distractor
object set. The algorithm succeeds when all the distractors have been ruled out; it fails
if all the properties have been processed and there are still some distractor objects.
The algorithm can be refined by ordering the checking of properties according to fixed
preferences; for example, first a taxonomic description of the target, second an absolute
property such as color, third a relative property such as size. Dale and Reiter also
stipulate that the type description of the target should be included in the description
even if its inclusion does not distinguish the target from any of the distractors; see
Algorithm 1. Dale and Reiter argue that this algorithm has a polynomial complexity
and that the theoretical run time can be characterized as nd × nl: the run time depends
solely on the number of distractor objects nd and the number of properties considered
in iterations nl. If we assume that nd and nl are both proportional to n, the number of ob-
jects being considered, then the complexity of the incremental algorithm is of order n2.
The incremental algorithm generates a description (in terms of type, color, and
size) which distinguishes a given target object from a set of distractor objects (if such
a description exists). However, we wish to generate locative expressions which iden-
tify objects, rather than simple descriptions. These locative expressions may contain
a description of a landmark object (in terms of type, color, or size), of a target object
(type, color, or size), and a topological or projective preposition relating those two
298
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Algorithm 1 The Basic Incremental Algorithm
Require: T = target object; D = set of distractor objects.
Initialize: P = {type, color, size}; DESC = {}
for i = 0 to |P| do
if |D| (cid:10)= 0 then
D(cid:11) = {x : x ∈ D, Pi(x) = Pi(T)}
if |D(cid:11)| < |D| then
DESC = DESC ∪ Pi(T)
D = {x : x ∈ D, Pi(x) = Pi(T)}
end if
else
Distinguishing description generated
if type(x) (cid:10)∈ DESC then
DESC = DESC ∪ type(x)
end if
return DESC
end if
end for
Failed to generate distinguishing description
return DESC
objects. To generate such locative expressions we repeatedly call the basic incremental
algorithm for a sequence of different possible spatial relations. The fact that each call to
the algorithm uses a different spatial relation results in a different set of objects from
the context being defined as candidate landmarks for each function call. If a given
spatial relation allows the basic incremental algorithm to generate a description which
distinguishes the target object from the set of distractor objects, that spatial relation is
used to generate an expression identifying that object. Otherwise we move on and call
the basic incremental algorithm for the next spatial relation in our sequence.
When generating a referring expression, we use a sequence of possible forms of
reference ordered by assumed cognitive load (see Figure 27), with simpler forms of
reference (those identifying object type, for example) coming early in the sequence
and more complex forms (those involving projective prepositions, for example) coming
later. This means that our approach will preferentially produce simpler expressions to
identify an object, and only if no such simple expressions can be found which distin-
guish that object successfully will more complex topological or projective prepositions
Figure 27
Cognitive load of reference forms.
299
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Computational Linguistics
Volume 35, Number 2
be produced. Our sequence of relations can be extended to include relations of ternary
and higher arity such as the ball between the box and the triangle or the ball near the box and
the triangle.
We use the models of topological and projective prepositions described in Sec-
tions 6.1 and 6.2 to define the regions around a landmark to which a given topological or
projective description applies. If the target or one of the distractor objects is the only ob-
ject within that region around a given landmark, this is taken to represent a contrastive
use of a preposition relative to that landmark. If that region contains more than one
object from the target and distractor object set, then it is a relative use of the preposition.
8.2.1 Landmarks and Distinguishing Descriptions. In order to use a locative expression,
an object in the context must be selected to function as the landmark. An implicit
assumption in selecting an object to function as a landmark is that the hearer can easily
identify and locate the object within the context. As shown in Example (4), a landmark
can be the speaker, the hearer, the scene, an object in the scene, or a group of objects in
the scene.8
Example 4
•
•
•
•
•
the ball on my right [speaker]
the ball to your left [hearer]
the ball on the right [scene]
the ball to the left of the box [an object in the scene]
the ball in the middle [group of objects]
Clearly, deciding which objects in a given visual context can function as landmarks
is a complex process. Some of the factors effecting this decision are object salience
and the functional relationships between objects. However, one basic constraint on
landmark selection is that the landmark should be distinguishable from the target. For
example, in the context provided by Figure 28 the ball has a relatively high salience,
because it is a singleton, despite the fact that it is smaller and geometrically less complex
than the other figures. Moreover, in this context, the ball is the only object in the scene
that can function as a landmark without recourse to using the scene itself or a grouping
of objects in the scene. Given the context in Figure 28 and all other factors being equal,
using a locative such as the man to the left of the man would be much less helpful than
using the man to the right of the ball.
Following this observation, we treat an object as a candidate landmark if the
following conditions are met:
1.
2.
The object is not the target.
The object is not a member of the distractor set.
Furthermore, a target landmark is a member of the candidate landmark set that stands
in relation to the target under the relation being considered and a distractor landmark
8 See Gorniak and Roy (2004) for further discussion on the use of spatial extrema of the scene and groups
of objects in the scene as landmarks.
300
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Figure 28
Visual context used to illustrate the relative semantics of topological and projective prepositions.
is a member of the candidate landmark set that stands in relation to a distractor object
under the relation being considered.
Using these categories of landmark we can define a distinguishing locative de-
scription as a locative description where there is a target landmark that can be dis-
tinguished using the basic incremental algorithm from all the members of the set of
distractor landmarks which stand under the relation used in the locative expression.
Given this, our approach is to try to generate a distinguishing description using the
standard incremental algorithm. If this fails, we divide the context into three compo-
nents: the target, the distractor objects, and the set of candidate landmarks. We then
begin to iterate through the hierarchy of relations and for each relation we create a
context model that defines the set of target and distractor landmarks. Once a context
model has been created we iterate through the target landmarks (using a salience order-
ing if there is more than one) and try to create a distinguishing locative description. A
distinguishing locative description is created by using the basic incremental algorithm
to distinguish the target landmark from the distractor landmarks. If we succeed in
generating a distinguishing locative description we return the description and stop
processing.
Algorithm 2 The Locative Incremental Algorithm
Require: T = target object; D = set of distractor objects; R = hierarchy of relations.
DESC = Basic-Incremental-Algorithm(T,D)
if DESC (cid:10)= Distinguishing then
create CL the set of candidate landmarks
CL = {x : x (cid:10)= T, DESC(x) = false}
for i = 0 to |R| do
create a context model for relation Ri consisting of TL the set of target landmarks and DL the set
of distractor landmarks
TL = {y : y ∈ CL, Ri(T, y) = true}
DL = {z : z ∈ CL, Ri(D, z) = true}
for j = 0 to |TL| by salience(TL) do
LANDDESC = Basic-Incremental-Algorithm(TLj, DL)
if LANDDESC = Distinguishing then
Distinguishing locative generated
return {DESC,Ri,LANDDESC}
end if
end for
end for
end if
FAIL
301
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Computational Linguistics
Volume 35, Number 2
If we cannot create a distinguishing locative description we move on to the next,
more complex spatial relation in the sequence of spatial relations, and attempt to gener-
ate a distinguishing locative description using that relation. This process continues until
either a distinguishing expression is produced or no possible spatial relations remain.
This algorithm runs the basic incremental algorithm a number of times for each
candidate relation in the list of possible relations. The length of this list will be a
constant; call it R. For each candidate relation, the number of times the incremental
algorithm runs is equal to the number of TL objects (the number of objects which
don’t fulfill the description of the target created by the current run of the incremental
algorithm, and which the target object stands under the currently selected relation to).
Call the number of TL objects nTL and note that nTL must be less than, and proportional
to, n (the total number of objects). The number of times the basic incremental algorithm
can run, in our system, is then proportional to NTL × R; replacing with nTL with n gives
n × R runs of the basic incremental algorithm. Inserting the complexity of the basic
incremental algorithm into this, we get an overall complexity of n2 × n × R = n3 × R,
which although worse than the basic incremental algorithm’s n2 complexity, is still
polynomial.
This algorithm cannot generate embedded locative descriptions, such as the bag on
the chair near the window, because it does not use spatial relations as properties to
describe the landmark. However, these descriptions can be generated if needed by
replacing the call to the basic incremental algorithm for the landmark object with a
call to the whole locative expression algorithm, using the target landmark as the target
object and the set of distractor landmarks as the distractors. A nice consequence of
this approach to generating embedded locative descriptions is that infinite descriptions
(e.g., the bag on the chair supporting the bag on the chair ...) will not be generated as the
target object is excluded from the context that the landmark’s description is generated
in. However, the cost of being able to generate these embedded descriptions is a higher
exponential complexity.
8.2.2 An Example. We can illustrate the framework using the visual context provided
by the scene on the left of Figure 29. This context consists of two red boxes R1 and
Figure 29
A visual scene and the topological analysis of R1 and R2.
302
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
R2 and two blue balls B1 and B2. Imagine that we want to refer to B1. We begin by
calling the locative incremental algorithm, Algorithm 2. This in turn calls the basic
incremental algorithm, Algorithm 1, which will return the property ball. However, this
is not sufficient to create a distinguishing description as B2 is also a ball. In this context
the set of candidate landmarks equals {R1,R2} and the first relation in the hierarchy is
topological proximity, which we model as described in Section 6.1. The image on the
right of Figure 29 illustrates the analysis of the scene using this framework: The green
region on the left defines the area deemed to be proximal to R1, and the yellow region
on the right defines the area deemed to be proximal to R2. It is evident that B1 is in
the area proximal to R1; consequently R1 is classified as a target landmark. As none of
the distractors (i.e., B2) are located in a region that is proximal to a candidate landmark
there are no distractor landmarks. As a result when the basic incremental algorithm is
called to create a distinguishing description for the target landmark R1 it will return
box and this will be deemed to be a distinguishing locative description. The overall
algorithm will then return the vector {ball, proximal, box} which would result in the
realizer generating a reference of the form: the ball near the box.
9. Conclusions and Future Work
In this article we have described the application of computational models of spatial
prepositions to visually situated dialog systems. These computational models allow sys-
tems to both interpret and generate expressions which refer to topological and projective
relations between objects in the visual environment. The computational models of spa-
tial prepositions we present are designed to handle reference resolution and generation
in complex visual environments containing multiple objects. In particular, these models
are designed to account for the contextual influence which the presence of multiple
objects has on the semantics of topological and projective prepositions. In this respect
our computational models move beyond other accounts of the semantics of spatial
prepositions, which typically do not model the contextual influence of other objects
on spatial semantics. Because most real-world visual scenes are complex and contain
multiple objects, our computational models for the semantics of spatial prepositions are
important for visually situated dialog systems intended to operate successfully in the
real world.
Clearly there are many interesting areas for future work. To date our research has
focused on a small number of static topological and projective prepositions. We feel,
however, that our framework will apply usefully to a range of other more complex static
and dynamic prepositions, for example: between, among, within, along, beside, around.
These prepositions either involve several objects or multiple areas and, consequently,
our account of the effect of distractor objects on the target–landmark relationship could
provide a worthwhile perspective on their semantics.
This leads to another promising area for future work. Although our current model
was designed to accommodate multiple distractor objects, our empirical studies have
focused on cases where there is only one distractor. An important aim for future research
is to extend these studies and test the model in situations with multiple distractors.
From a theoretical point of view, we feel that our approach to the semantics of spa-
tial prepositions illustrates an important point for researchers working on the semantics
of natural language in general: that it is possible to investigate and model semantics not
solely as a linguistic phenomenon, but also in terms of non-linguistic factors such as
the visual environment in which language is used. For example, in the psychological
evaluations described in Section 7 we found that the semantic applicability of “near” to
303
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Computational Linguistics
Volume 35, Number 2
the relationship between a target and a landmark object was reliably influenced by the
presence and location of a third, distractor, object, which was not part of the linguistic
context. That the semantics of language is influenced by non-linguistic factors is an old
point and an obvious one: however, we think that our research on visually-situated
dialog systems makes a useful contribution by showing that these systems provide
ideal testbeds for investigating the interaction between language and vision, and for
developing detailed and useful computational models of how those interactions work.
References
Baldridge, J. and G. J. M. Kruijff. 2002.
Coupling CCG and hybrid logic
dependency semantics. In Proceedings
of the 40th Annual Meeting of the Association
for Computational Linguistics (ACL-02),
pages 319–326, Philadelphia, PA.
Baldridge, J. and G. J. M. Kruijff. 2003.
Multi-modal combinatory categorial
grammar. In Proceedings of the 10th
Conference of the European Chapter of the
Association for Computational Linguistics
(EACL-03), volume 1, pages 211–218,
Budapest.
Beermann, D. and L. Hellan. 2004. Semantic
decomposition in a computational HPSG
grammar: A treatment of aspect and
context-dependent directionals. In
Proceedings of the HPSG04 Conference,
pages 357–377, Leuven.
Bunt, H. 1994. Context and dialogue control.
Think, 3:19–31.
Cahill, A., M. Burke, R. O’Donovan, J. van
Genabith, and A. Way. 2004. Long-distance
dependency resolution in automatically
acquired wide-coverage PCFG-based
LFG approximations. In Proceedings of the
42nd Annual Meeting of the Association for
Computational Linguistics (ACL-04),
pages 320–327, Barcelona.
Carletta, J., A. Isard, S. Isard, J. C. Kowtko,
G. Doherty-Sneddon, and A. H. Anderson.
1997. The reliability of a dialogue structure
coding scheme. Computational Linguistics,
23(1):13–32.
Carlson-Radvansky, L. A. and G. D. Logan.
1997. The influence of reference frame
selection on spatial template construction.
Journal of Memory and Language, 37:411–437.
Cohn, A. G., B. Bennett, J. M. Gooday, and
N. Gotts. 1997. RCC: A calculus for region
based qualitative spatial reasoning.
GeoInformatica, 1:275–316.
Coventry, K. R. 1998. Spatial prepositions,
functional relations, and lexical
specification. In P. Olivier and
K. P. Gapp, editors, Representation and
Processing of Spatial Expressions. Lawrence
Erlbaum Associates, Hillsdale, NJ,
pages 247–262.
304
Coventry, K. R. and S. Garrod. 2004. Saying,
Seeing and Acting. The Psychological
Semantics of Spatial Prepositions. Essays in
Cognitive Psychology Series. Lawrence
Erlbaum Associates, Hillsdale, NJ.
Dale, R. and N. Haddock. 1991. Generating
referring expressions involving relations.
In Proceedings of the 5th Conference of the
European Chapter of the Association for
Computational Linguistics (EACL-91),
pages 161–166, Berlin.
Dale, R. and E. Reiter. 1995. Computatinal
interpretations of the gricean maxims in
the generation of referring expressions.
Cognitive Science, 18:233–263.
Fuhr, T., G. Socher, C. Scheering, and
G. Sagerer. 1998. A three-dimensional
spatial model for the interpretation
of image data. In P. Olivier and
K. P. Gapp, editors, Representation and
Processing of Spatial Expressions. Lawrence
Erlbaum Associates, Hillsdale, NJ,
pages 103–118.
Gapp, K. P. 1994. Basic meanings of
spatial relations: Computation and
evaluation in 3D space. In Proceedings
of the 12th National Conference on Artificial
Intelligence (AAAI-94), Seattle, WA,
pages 1393–1398.
Gapp, K. P. 1995. An empirically validated
model for computing spatial relations. In
Proceedings of the 19th German Conference on
Artificial Intelligence (KI-95), Bielefeld,
Germany, pages 245–256.
Gardent, C. 2002. Generating minimal
definite descriptions. In Proceedings of
the 40th Annual Meeting of the Association
of Computational Linguistics (ACL-02),
pages 96–103, Philadelphia, PA.
Garrod, S., G. Ferrier, and S. Campbell. 1999.
In and on: Investigating the functional
geometry of spatial prepositions.
Cognition, 72:167–189.
Gawron, J. M. 1986. Situations and
prepositions. Linguistics and Philosophy,
9(3):327–382.
Gorniak, P. and D. Roy. 2004. Grounded
semantic composition for visual scenes.
Journal of Artificial Intelligence Research,
21:429–470.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Kelleher and Costello
Computational Models of Spatial Prepositions for VSD
Hajicov´a, E. 1993. Issues of Sentence Structure
and Discourse Patterns, volume 2 of
Theoretical and Computational Linguistics.
Charles University Press, Prague.
Hayward, W. G. and M. J. Tarr. 1995. Spatial
language and spatial representation.
Cognition, 55:39–84.
Herskovits, A. 1986. Language and Spatial
Cognition: An Interdisciplinary Study of
Prepositions in English. Studies in Natural
Language Processing. Cambridge
University Press, Cambridge, UK.
Horacek, H. 1997. An algorithm for
generating referential descriptions with
flexible interfaces. In Proceedings of the
35th Annual Meeting of the Association for
Computational Linguistics, pages 206–213,
Madrid.
Jackendoff, R. 1983. Semantics and Cognition.
Current Studies in Linguistics. The MIT
Press, Cambridge, MA.
Kelleher, J., F. Costello, and J. van Genabith.
2005. Dynamically structuring, updating
and interrelating representations of visual
and lingusitic discourse context. Artificial
Intelligence, 167(1–2):62–102.
Kelleher, J. and J. van Genabith. 2004. Visual
salience and reference resolution in
simulated 3D environments. AI Review,
21(3-4):253–267.
Kelleher, J. and J. van Genabith. 2006. A
computational model of the referential
semantics of projective prepositions.
In P. Saint-Dizier, editor, Syntax and
Semantics of Prepositions, Speech and
Language Processing. Kluwer Academic
Publishers, Dordrecht, The Netherlands,
pages 199–216.
Kelleher, J. D. and G. J. Kruijff. 2006.
Incremental generation of spatial
referring expressions in situated dialog.
In Proceedings of the 3rd Joint Conference
of the International Committee on
Computational Linguistics and the
Association for Computational Linguistics
(COLING/ACL-06), pages 1041–1048,
Sydney.
Kelleher, J. D., G. J. Kruijff, and F. Costello.
2006. Proximity in context: an empirically
grounded computation model of
proximity for processing topological
spatial expressions. In Proceedings of the
3rd Joint Conference of the International
Committee on Computational Linguistics
and the Association for Computational
Linguistics (COLING/ACL-06),
pages 745–752, Sydney.
Klein, M. 1999. An overview of the state of
the art of coding schemes for dialogue act
annotation. In V. Matousek, P. Mautner,
J. Ocelikov´a, and P. Sojka, editors, Text,
Speech and Dialogue (TSD’99), Lecture
Notes in Computer Science. Springer,
Berlin/Heidelberg, pages 274–297.
Krahmer, E. and M. Theune. 2002. Efficient
context-sensitive generation of referring
expressions. In K. van Deemter and
R. Kibble, editors, Information Sharing:
Reference and Presupposition in Language
Generation and Interpretation. CLSI
Publications, Stanford, CA, pages 223–263.
Kruijff, Geert-Jan, John Kelleher, and Nick
Hawes. 2006. Information fusion for
visual reference resolution in dynamic
situated dialogue. In Elisabeth Andre,
Laila Dybkjaer, Wolfgang Minker,
Heiko Neumann, and Michael Weber,
editors, In Proceedings of Perception and
Interactive Technologies (PIT06),
volume 4021 of Lecture Notes in Computer
Science. Springer Berlin/Heidelberg,
pages 117–128.
Kuipers, Benjamin. 2000. The spatial
semantic hierarchy. Artificial Intelligence,
19:191–233.
Landau, B. 1996. Multiple geometric
representations of objects in language
and language learners. In P. Bloom,
M. Peterson, L. Nadel, and M. Garrett,
editors, Language and Space. MIT Press,
Cambridge, MA, pages 317–363.
Levelt, W. J. M. 1996. Perspective taking and
ellipsis in spatial descriptions. In
M. Bloom, P. Peterson, L. Nadell, and
M. Garrett, editors, Language and Space.
MIT Press, Cambridge, MA, pages 77–108.
Levinson, S. 1996. Frame of reference and
Molyneux’s question: Crosslinguistic
evidence. In M. Bloom, P. Peterson,
L. Nadell, and M. Garrett, editors,
Language and Space. MIT Press,
Cambridge, MA, pages 109–170.
Levinson, S. 2003. Space in Language and
Cognition: Explorations in Cognitive
Diversity. Cambridge University Press,
Cambridge, UK.
Logan, G. D. 1994. Spatial attention and the
apprehension of spatial relations. Journal
of Experimental Psychology: Human
Perception and Performance, 20:1015–1036.
Logan, G. D. 1995. Linguistic and conceptual
control of visual spatial attention.
Cognitive Psychology, 12:523–533.
Logan, G. D. and D. D. Sadler. 1996.
A computational analysis of the
apprehension of spatial relations.
In M. Bloom, P. Peterson, L. Nadell,
and M. Garrett, editors, Language and
305
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
Computational Linguistics
Volume 35, Number 2
Space. MIT Press, Cambridge, MA,
pages 493–529.
Lorch, R. F. and J. L. Myers. 1990.
Regression analyses of repeated
measures data in cognitive research.
Journal of Experimental Psychology:
Learning, Memory, and Cognition,
16(1):149–157.
Olivier, P. and J. Tsujii. 1994. Quantitative
perceptual representation of prepositional
semantics. Artificial Intelligence Review,
8:147–158.
Regier, T and L. Carlson. 2001. Grounding
spatial language in perception:
An empirical and computational
investigation. Journal of Experimental
Psychology: General, 130(2):273–298.
Treisman, A. and S. Gormican. 1988. Feature
analysis in early vision: Evidence from
search assymetries. Psychological Review,
95:15–48.
Tseng, J. L. 2000. The Representation and
Selection of Prepositions. Ph.D. thesis,
University of Edinburgh.
Varges, S. 2004. Overgenerating referring
expressions involving relations and
booleans. In Proceedings of the 3rd
International Conference on Natural
Language Generation (INLG-04),
pages 171–181, Brighton.
Yamada, A. 1993. Studies in Spatial
Descriptions Understanding Based on
Geometric Constraints Satisfaction.
Ph.D. thesis, University of Kyoto.
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
/
c
o
l
i
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
3
5
2
2
7
1
1
7
9
8
6
1
2
/
c
o
l
i
.
0
6
-
7
8
-
p
r
e
p
1
4
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
8
S
e
p
e
m
b
e
r
2
0
2
3
306