Amos, Martyn and Jamie Webster. 2022. Crowd-Sourced Identification of Characteristics of Collective Human Motion. Artificial Life,
prueba sin corregir.
Martyn Amos*
Northumbria University
Department of Computer and
Information Sciences
martyn.amos@northumbria.ac.uk
Jamie Webster
Northumbria University
Department of Computer and
Information Sciences
Palabras clave
Crowds, simulation, realism, agents,
Turing test
Crowd-Sourced Identification
of Characteristics of
Collective Human Motion
Abstract Crowd simulations are used extensively to study the
dynamics of human collectives. Such studies are underpinned by
specific movement models, which encode rules and assumptions
about how people navigate a space and handle interactions with
otros. These models often give rise to macroscopic simulated
crowd behaviours that are statistically valid, but which lack the
noisy microscopic behaviours that are the signature of believable
real crowds. In this article, we use an existing Turing test for crowds
to identify realistic features of real crowds that are generally omitted
from simulation models. Our previous study using this test
established that untrained individuals have difficulty in classifying
movies of crowds as real or simulated, and that such people often
have an idealised view of how crowds move. In this follow-up study
(with new participants) we perform a second trial, which now
includes a training phase (showing participants movies of real
crowds). We find that classification performance significantly
improves after training, confirming the existence of features that
allow participants to identify real crowds. High-performing
individuals are able to identify the features of real crowds that
should be incorporated into future simulations if they are to be
considered realistic.
1 Introducción
A significant amount of Artificial Life research is concerned with studying the collective dynamics
of mobile agents operating in a spatially explicit environment. Relevant domains include the flocking
behaviour of birds and other animats (Boids being the archetypal example; Reynolds, 1987), el
power of distributed swarm robotics (Brambilla et al., 2013), and the engineering of biological cell
poblaciones (Gorochowski, 2016). In all such cases, agents (whether simulated or physically realised)
are situated in Cartesian space and may interact both with one another and with their environment.
One specific area of growing interest is the study of crowd dynamics (Adrian et al., 2019), eso es,
the behaviour of large numbers of human individuals moving through and interacting in a given
ambiente. The need to understand collective human behaviour in physical space is pressing, as it
has significant implications for event planning and management (Crociani et al., 2016), urban design
(Feng et al., 2016), and incident response and analysis (Harding et al., 2011; Pretorius et al., 2015).
During and after the COVID pandemic, with potentially long-lasting and profound structural and
behavioural changes being made, the need to understand the crowd will persist (Pouw et al., 2020).
* Autor correspondiente.
© 2022 Massachusetts Institute of Technology Artificial Life 28: 401–422 (2022) https://doi.org/10.1162/artl_a_00381
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Due to the inherent difficulty of performing large-scale experiments with human participants,
crowd simulations (Thalmann & Musse, 2013) (usually using an agent-based approach) are often used
to investigate collective behaviour and the impact of physical or behavioural interventions on crowd
dinámica. Two features of simulations are of interest: validity and believability. Validity describes
how closely the output of the model matches data obtained from the real world (Klüpfel, 2007;
Pettré et al., 2009; Seer et al., 2014). Believability is subtly different and concerns the human per-
ception of whether or not a crowd’s behaviour is realistic or plausible. We are not concerned with
cinematic, photorealistic believability of the rendering of a crowd, but whether or not observers are
able to detect characteristic patterns of behaviour in real crowds that are absent in simulated crowds.
Fundamentally, we assume that a simulation is valid and are interested in whether or not it also
looks realistic.
The rest of the article is organised as follows: We give some background motivation, outline
our hypothesis, and describe our crowd Turing test framework for its investigation. We proceed to
describe our experimental method for the current study, and then describe our results. We conclude
with a discussion of the implications of our findings and suggestions for possible future work.
2 Background and Motivation
Crowd simulations are now used extensively in a wide range of application domains from urban
planificación (Aschwanden et al., 2011), emergency response (Mahmood et al., 2017) and games and
training simulations (Mckenzie et al., 2008), to the CGI generation of Hollywood movie scenes (a
classic example being the large-scale battle scenes in The Lord of the Rings series; Ricks, 2013). Mayoría
crowd simulations are underpinned by a behavioural/movement model, which makes simplifying
assumptions about individuals and is used by agents to determine their trajectories through the
simulated space.
The Social Forces Model (SFM; Helbing & Molnar, 1995) lies at the heart of many scientific
and commercial crowd simulation packages, such as FDS+EVAC (Korhonen et al., 2010), PedSim
(Gloor, 2016), SimWalk (Kimura et al., 2003), and MassMotion (Rivers et al., 2014). Sin embargo, allá
are well-established deficiencies in this and other existing movement models. As Lerner et al. (2007,
páginas. 655–656) argue,
While such approaches may capture the broad overall behaviour of the crowd, they often
miss the subtle details displayed by the individuals. The range of individual behaviours
that may be observed in a real crowd is typically too complex for a simple behavioural
modelo. . . . Simple things such as walking in pairs, stopping to talk to someone, changing
one’s mind and heading off in a different direction or aimlessly wandering about, are just
a few examples which are difficult to capture.
The emphasis here is less on the locomotion model of avatars or the cosmetic appearance of the
agents, and more on the patterns and quirks of movement that distinguish a real crowd from a
simulated one.
Why is this important? Después de todo, emergency planners (to take one significant user group) will
generally be satisfied if the overall outcome of a simulation (in terms of the time required to evacuate
a stadium, Por ejemplo) is broadly valid, and will usually not concern themselves with micro-level
turbulence and other localised phenomena. Sin embargo, as Fuchsberger et al. (2017) argue, crowd
simulations still meet with resistance from decision makers in some significant industrial and societal
dominios, and this may be due to a lack of trust in their outputs (caused, Sucesivamente, by a lack of realism).
Specific concerns identified as relevant to the current article include unnatural motion paths, so if
we can go some way towards addressing this, then it may lead to increased acceptance and uptake
of these techniques.
402
Artificial Life Volume 28, Número 4
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
As we argue in Webster and Amos (2020, pag. 2), there is still a need for more realistic behavioural/
movement models in crowd simulation:
This is motivated by a widely-acknowledged need for crowd simulations to include more
realistic features derived from individual and social psychology (such as group-level
behaviours, indecision, etc.) (Lemercier & Auberlet, 2016; Seitz et al., 2017; Templeton
et al., 2015), which are generally not included in software packages, and which give rise to
rather unrealistic or “robotic” patterns of behaviour at the population level.
Much work has already been done on making crowd simulations more realistic; here we highlight
some representative contributions. Lerner et al. (2007) describes the construction of a database of
behavioural motifs that may be incorporated into an agent’s behaviour. Peters and Ennis (2009)
used manual annotation of observations to extract information about group-level behaviours that
were then incorporated into simulations. (This study also included human trials of perception of
realism.) More recently, Wei et al. (2018) and Yao et al. (2020) used machine learning to extract
features of observed crowds, which were then incorporated into a crowd simulation, but nei-
ther study assessed whether or not these modifications actually made the overall crowd behaviour
more realistic.
Fundamentally, what passes for realistic is inherently subjective. To our knowledge, until we
performed this study no extensive work had been done on capturing the essence of what makes a
crowd realistic from the perspective of human observers.
Our previous work (Webster & Amos, 2020) showed that crowd simulations that employ the
most commonly used movement model are valid (in terms of their outputs having the same
statistical properties as observed crowds), but they still possess a signature that allows them to be
distinguished from real crowds. Simplemente pon, to human observers, simulated crowds are still per-
ceived differently from real crowds. En tono rimbombante, aunque, we also found that although people are
able to reliably partition crowds into real/simulated, they are unable to tell which is which. Eso es, individu-
als are able to separate crowd movies into two categories, but they are unable to reliably label the real
crowds. We found that individuals tend to have an idealised view of the behaviour of real crowds,
which is often at odds with reality. These findings confirm the observation that real and simulated
crowds have different microscopic features that allow them to be partitioned, if not classified.
To summarise, our previous work established the existence of features that are present in real
crowds but not in simulated crowds; the aim of the current article is to identify those features. En
Webster and Amos (2020, pag. 1), we argue that “Our results suggest a possible framework for estab-
lishing a minimal set of collective behaviours that should be integrated into the next generation of
crowd simulation models.” Here, we use the Turing test classification task to identify that specific
set of features that allow trained viewers to reliably classify (not just partition) real and simulated
crowds. Our results show that classification performance over a population of observers increases
significantly after an initial training phase, and that individuals are able to identify a core set of
realistic behaviours that are present in real crowds, but that are absent in simulated crowds. Este
immediately suggests new features that must be incorporated into future crowd simulations if they
are to be considered realistic.
3 Hipótesis
In a landmark article, Alan Turing (1950) proposed a method to investigate what would become
known as artificial intelligence. Rather than directly answering the somewhat ambiguous question
Can machines think?, Turing preferred to reframe the issue in terms of an imitation game, in which an
interrogator engaged in conversation with two agents via teletype. One of the agents (A) is a man,
and the other (B) a woman, and the interrogator’s objective is to decide which is which by asking
questions of both and assessing their responses. The task of A is to cause the interrogator to guess
Artificial Life Volume 28, Número 4
403
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
incorrectly (eso es, persuade them that he is a woman), and the task of B is to “help” the interrogator
to guess correctly, generally by giving truthful answers. We may, por lo tanto, interpret the imitation
juego (commonly referred to as the Turing test) more generally, with the role of A being played
by an artificial system that seeks to persuade a human observer that it is the “genuine article,” and
B being played by an actual real world example of the system under study. En tono rimbombante, the test
does not seek to establish the truth of A’s outputs (eso es, their validity), but simply whether or
not A could be said to represent a reasonable facsimile of the system represented by B.
This conceptual framework has been proposed for biological modelling (Harel, 2005) and arti-
ficial life (Cronin et al., 2006) as a way of investigating the realistic properties of artificial systems.
We previously used the same approach to investigate crowd simulations, basing our approach on a
related Turing test for collective motion in fish (Herbert-Read et al., 2015). In Webster and Amos
(2020), we describe the results of initial experiments, using a total of 540 in-person participants.
The first set of trials presented individuals with a sequence of paired movies, using a side-by-side
representación. In each pair, one of the movies represented the movement of a real crowd, y
the other represented a computer simulation of the same scenario (the ordering was randomised).
All observations were of the same physical space, and both movies were generated using the same
custom rendering engine. Para cada par (over six pairs in total), participants were asked to specify
which of the pair they thought was the real crowd (eso es, they had to identify the real crowd). Para
the second set of trials, participants were presented with the movies individually, and this time they
were asked to classify each movie as either real or simulated.
We found that participants performed better when they were asked to classify crowds rather than
having to choose between the two, but a striking feature of our results was that neither mode allowed
participants to perform better than random guessing. A simplistic interpretation of this result could
be that existing simulations are good enough to “pass” the crowd Turing test, as human observers
are unable to distinguish between them, but here we emphasise that the imitation game, as originally
described by Turing, requires the interrogator to be able to specify which agent is the man.
Strikingly, the most common score in the first trial was zero, meaning that a significant propor-
tion of participants (36.46%) failed to identify a single real crowd. Eso es, their entire perception
of what constitutes a real crowd was perfectly flipped compared to reality. This sizeable group of
participants were able to perfectly partition movies into real or simulated, but were utterly unable
to say which was which. This confirmed the existence of a set of real crowd behaviours (infor-
mally described by participants in terms of “standing around“ and “moving with purpose”) eso
allowed individuals to separate real from simulated, but which were incorrectly ascribed to the sim-
ulation as generating “unrealistic” crowd behaviour. Our conclusion was that participants had an
idealised view of real crowd behaviour, and preferred to think that it was much less “messy” and
unpredictable than observations would suggest.
Our hypothesis, por lo tanto, is that participants in a crowd Turing test will improve their classifi-
cation performance after being trained by viewing real crowds, as a result of being able to identify
and ascribe only to real crowds the realistic features that are manifested in the training set.
4 Experimental Methods
Our protocol was largely modelled on that of Webster and Amos (2020), but limitations imposed
by the COVID pandemic required us to perform our trials online, as opposed to in person. Nosotros
do not believe that this modification had any significant impact on our results; en efecto, it actually
allowed us to recruit a more diverse range of participants, rather than using only University students
(which was a possible criticism of the original study).
We performed two sets of Turing test experiments; the first (Prueba 1) was an online-only repeti-
tion of the second (classification) test from Webster and Amos (2020), with entirely new partici-
pants. We attracted 232 Participantes, who were recruited via social media. This first test allowed us
to assess the ability of each untrained participant to classify crowds as either real or simulated, de este modo
404
Artificial Life Volume 28, Número 4
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
assigning each one a baseline score. We allowed an appropriate period of time to pass (4 meses)
in order to ensure that the tests were independent (eso es, any learning effects from the first test
would not be carried over to the second). We then contacted every Test 1 participant who supplied
an email address to invite them to participate in the follow-up Test 2 (they were each offered a 10
GBP gift card as an incentive); 50 participants accepted our invitation. Prueba 2 participants were then
trained by asking them to first watch six rendered movies of crowds that were explicitly described
as real. Participants then performed a second version of the classification task (as in Test 1), using a
set of real and simulated clips that was different from that used previously (in order to avoid effects
induced by familiarity with the clips).
Given that each participant had a known baseline score from Test 1, we were able to establish
whether or not the training phase had a significant effect on classification ability. Los participantes fueron
specifically asked to identify features that they thought allowed them to distinguish between real and
simulated crowds.
Prueba 1 was performed at the end of June–start of July 2020, and Test 2 was performed in Decem-
ber 2020. Our trial protocol was approved by the Northumbria University Faculty of Engineering
and Environment Ethics Committe, application number 24623. We now describe each component
of the trial in more detail.
4.1 Pedestrian Motion Data Set
We used data on real pedestrians from the University of Edinburgh School of Informatics
(Majecka, 2009). This public data set, captured in 2010, contains over 299,000 individual trajec-
tories corresponding to the movement of individuals through the school’s Informatics Forum, y
is one of the largest open data sets of its type. It has been used in several studies of pedestrian
movement and tracking. Fernando et al. (2018) used the data set to pre-train short- and long-term
trajectory prediction models, proposing a “light-weight” sequential Generative Adversarial Network
(GAN) architecture for person localisation, which “overcomes issues related to occlusions and noisy
detections” (Fernando et al., 2018, pag. 1122). In a case study on the Edinburgh Informatics forum,
Lovreglio et al. (2017) developed a microscopic calibration procedure for floor field cellular au-
tomaton models, comparing two floor field specifications to identify the best model for simulating
pedestrians in the forum. Sin embargo, this study was only concerned with individual trajectories and
did not consider the crowds as a collective. Finalmente, recurring activity patterns were identified using
non-parametric Bayesian methods which couple spatial and temporal patterns with minimal prior
conocimiento (h. Wang & O'Sullivan, 2016).
4.1.1 Environment
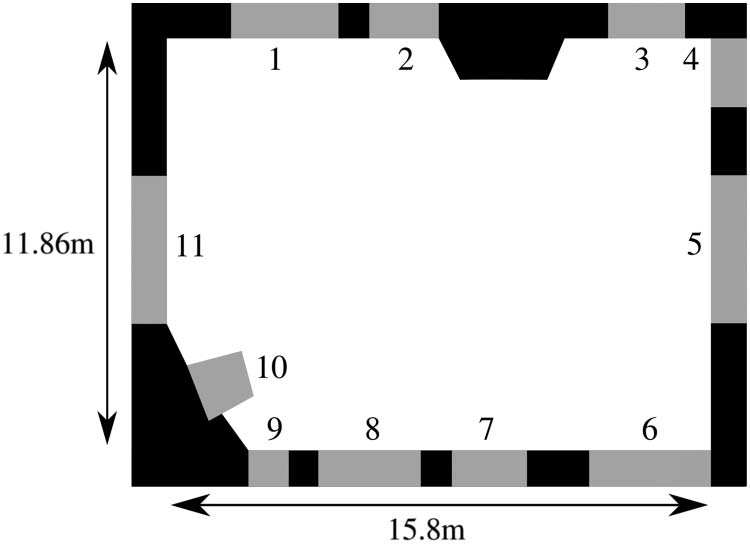
A photo of the Forum space is shown in Figure 1, and a diagram is shown in Figure 2. The Fo-
rum is rectangular in shape (measuring approximately 15.8 × 11.86 metres), tiene 11 ingress/egress
puntos, and is generally clear of obstructions. Images were captured (9 per s) by a camera sus-
pended 23 m above the Forum floor, from which individual trajectories were extracted and made
disponible (extraction was performed by Majecka, 2009). We note that only the trajectories have been
made publically available, and not the original video recordings, for ethical and practical reasons
(these files require several terabytes of storage). En tono rimbombante, none of the individuals whose tra-
jectories were captured was actively participating in movement studies; the trajectories, por lo tanto,
are as close to natural as possible; es decir., they have behavioural ecological validity (Lovreglio et al.,
2017).
4.1.2 Pedestrian Data Set
The data set is stored across a number of files, each file representing a day’s worth of crowd record-
ings. Each file stores a list of sightings over that period, where a sighting is defined as an individual
entering (but not necessarily leaving) the frame (por supuesto, individuals may also leave and then
re-enter the frame, which would be interpreted as an entirely new sighting). Each row in the file
Artificial Life Volume 28, Número 4
405
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Cifra 1. Single movie frame of the Edinburgh Informatics Forum, taken from Majecka (2009).
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Cifra 2. Diagram of Edinburgh Informatics Forum (ingress and egress points numbered), taken from Webster and
Amos (2020).
therefore corresponds to a sighting. Every sighting during the time period covered by the file is
assigned a unique agent ID, and the individual’s trajectory is stored as a list of 3-tuples of the form
< x, y, timestep >. Each time step codes for one frame in the original footage (recorded at 9 marcos
per second; fps). Majecka (2009, para. 3) notes that “the sample rate can vary over short periods”
due to errors with the capture program; sin embargo, “since each captured frame is relatively indepen-
dent of captured frames more than 10-20 seconds later,” this did not significantly impact on the
quality of the resulting trajectories.
In what follows, we use the term clip to specifically refer to a time-limited sequence of trajectory
datos (whether taken from the Edinburgh data set or from the output of a simulation), Opuesto a
a movie visualisation. We first wrote a script to convert a list of trajectories into a frame-by-frame
representation of agent locations over time. This outputs co-ordinates for all the visible agents at
each time step, which is required for rendering the trajectories into videos, as well as for analysing
the crowds at each point in time. We also wrote another script to essentially reverse this process (ex-
tracting individual trajectories from time step data), which is necessary for analysing certain features
of individual trajectories in clips (both real and simulated).
4.1.3 Data Cleaning
Occasionally lossy detection by the camera means that some trajectories have missing sections for
several time steps; once rendered, these individuals temporarily disappear from the frame and then
406
Artificial Life Volume 28, Número 4
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
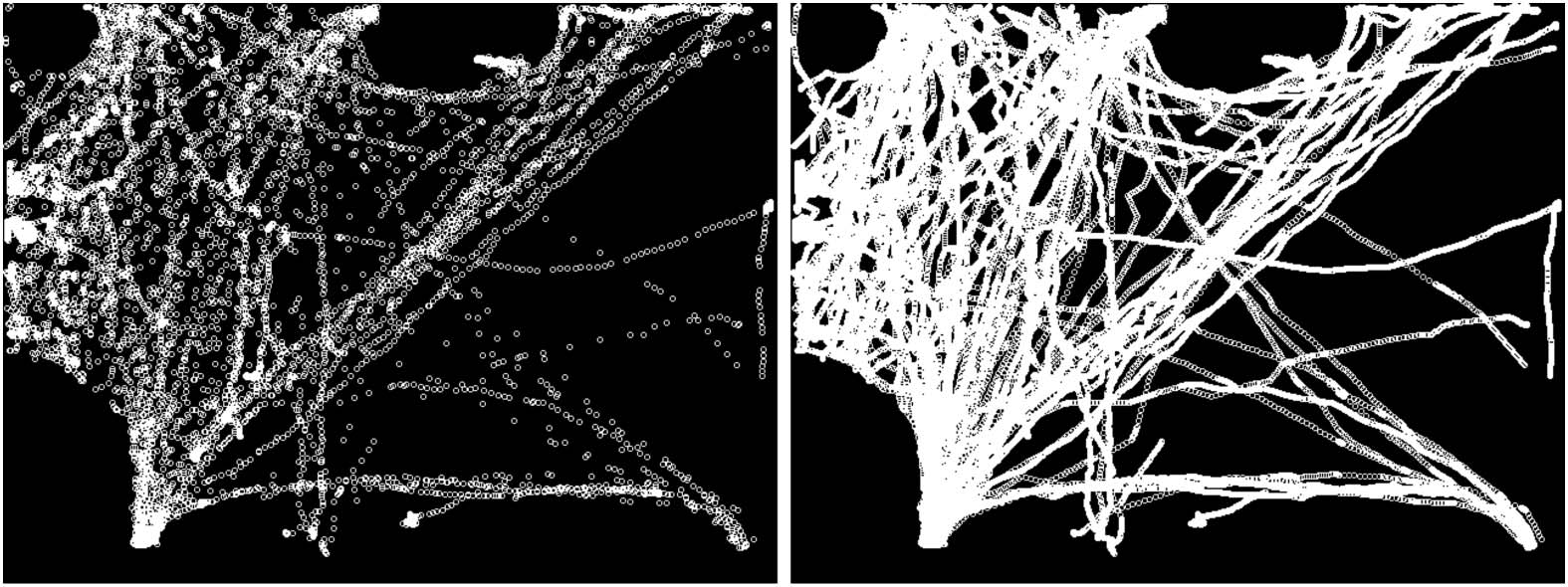
Cifra 3. All trajectories in a crowd clip rendered to single images at 9 (izquierda) y 72 (bien) frames per second.
reappear. To address this, we automatically detected such situations and interpolated co-ordinates
for the missing time steps when parsing the Edinburgh data set. Each new co-ordinate is placed
proportionally between the surrounding co-ordinates, depending on the number of missing time
steps. As the Edinburgh data trajectories were recorded at 9 fps, these additional co-ordinates pre-
vent agents from disappearing in renders, but do not alter the overall shape of trajectories. Across
el estimado 7.9 million coordinates in the data set, a total of 230,046 trajectory time gaps were
identified. De estos, 128,660 (55.93%) were made up of 1 frame and 49,794 (21.65%) eran 2 marcos
in duration. The largest observed time gaps were 13 y 14 marcos; sin embargo, these were each identi-
fied only once and were not present in the real crowd data clips used in this research. Approximately
99.20% of all identified time gaps were of 9 frames or fewer (approximately one second of camera
tracking), and interpolation of these time gaps did not result in any observable issues. We also in-
creased the number of frames per second of both sets of trajectories (real and simulated), de 9 a
72, by interpolating co-ordinates. This improved the smoothness of the trajectories once abstracted
and rendered into video clips. This enables smooth video playback for the purpose of comparisons,
but does not alter the shape of the trajectories, as the distance between co-ordinates is negligible.
Cifra 3 shows all co-ordinate trajectories in one crowd clip rendered to single images at both 9 y
72 fps.
4.1.4 Visualisation
We wrote a utility to search the Edinburgh data set and extract clips of a specific duration containing
a specific number of individuals. Both simulated and real individuals were rendered in a uniform
moda, using a tool coded in Java. This allowed us to produce top-down visualisations of both real
and simulated clips that were identical in appearance, with individuals represented as filled circles,
and headings depicted by an arrow (ver figura 4). Stationary agents in real crowd clips appear to
“flick” their headings rapidly due to inaccurate camera detection, so headings are only rendered
when an agent is in motion.
The use of abstract, simplified shapes, and a top-down, 2D presentation is relatively common
in crowd studies (Bode et al., 2015; Singh et al., 2009; Smith et al., 2009; Wagner & Agrawal, 2014;
W.. l. Wang y cols., 2017; Zhang et al., 2019), although 3D representations are also used (Loscos et
Alabama., 2003; Luo et al., 2008; Moussaïd et al., 2016; Pelechano et al., 2007).
As in Webster and Amos (2020), we decided against using realistic body shape rendering and
3D views, as initial tests suggested that such a presentation scheme (using animated avatars) would
actually distract viewers from the main aim of the experiment, which was to look for patterns of
behaviour in the crowd. Además, at least one study has shown that crowds that are viewed
from the top-down are perceived as being just as realistic as those viewed from eye-level (Ennis
et al., 2011).
Artificial Life Volume 28, Número 4
407
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Cifra 4. Example rendering of a crowd scene, taken from Webster and Amos (2020).
The simulated crowd trajectories were converted into the same format as the real crowds for
representación. Each time step has a corresponding set of co-ordinates representing a real or simulated
person in the Edinburgh Forum, as well as their heading. At every time step in a clip, our rendering
tool generates a PNG image, and the sequence was then combined into a video. The staircase
represented in blue is an obstacle that simulated agents avoid, and the staircase represented in black
is an egress point located slightly inside the Forum.
4.1.5 Clip Analysis
For each clip, we extracted the route choice distribution and the entry time distribution for all
individuals. This allowed us to initialise our simulations with the same distributions, ensuring that the
runs closely matched the macroscopic properties of the real-world observations (while leaving room
for the microscopic differences in which we are interested). In a later section, we show heatmaps of
the entry and exit distributions of the real crowd clips.
After rendering real crowd clips from the Edinburgh data set for the first time, we saw a clear
difference in the maximum velocity and acceleration of agents in several clips, with some agents
moving unnaturally quickly. This was attributed to the variability in camera capture rate discussed
earlier. To adjust for this variability, we calculated the average velocity of individuals in each clip,
and used this to scale the clip’s length (by modifying the video playback speed), thus normalising
the velocity of individuals relative to expected walking speed (Bohannon, 1997).
4.2 Simulation Construction
Each test required participants to classify a number of clips of pedestrian movement as either real or
simulado. We began by selecting, at random, a number of clips (30 s duration) from the Edinburgh
data set, and extracting information about the number of individuals visible and the entry/exit point
distribución. This information was then used to seed a simulation. In this way, we obtained both real
and simulated versions of the same scenario; the real version was a rendered version of the actual
observaciones, and the simulated version was a rendered version of the output of the model.
In order to model the scenarios captured in each real Edinburgh clip, we simulated pedestrian
movement using the Vadere package (Zönnchen et al., 2020). This is an open-source package, cual
means that (unlike commercial software) its movement models are open to inspection. En tono rimbombante,
it also allows for easy exporting of simulated pedestrian trajectories, which is necessary for rendering.
A crucial component of the simulation is the crowd motion model. This defines the rules of in-
teraction between individuals (p.ej., avoidance), and between individuals and their environment
(p.ej., repulsion from walls and physical obstacles), as well as route choice behaviour and differ-
ential walking speed. Many different crowd motion models exist (Duives et al., 2013), but perhaps
408
Artificial Life Volume 28, Número 4
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
the most commonly used type is based on social forces. Helbing and Molnar’s (1995) social force model
is a microscopic, continuous model that uses attractive and repulsive force fields between individuals
(and between individuals and their environment) to guide movement.
We selected the SFM as the baseline model for our simulations, como (1) it is very well-established
and available for use in most open-source crowd simulation software, (2) “optimal” parameters
have been refined over time, y (3) it is “recommended for pedestrian crowd movement research”
following the thorough review by Duives et al. (2013, pag. 208). We also compared the SFM with the
gradient navigation model (GNM; Dutra et al., 2017), in order to avoid potential bias imposed by only
using one motion model. The GNM is available as a default model type in Vadere, and we found
that GNM simulation outputs have similar statistical properties to SFM outputs. For all simulations,
we use the pre-supplied Vadere templates for the SFM/GNM with default attributes and parameters
(listed in Table 1). We note that all default parameter values are the same across both models with
the exception of pedestrian recognition distance (0.3 for SFM, y 0.8 for GNM), but we do not
believe this had any significant impact on our results.
Vadere stores its simulation input files in JSON format, and these files specify the topography
of the simulation space and initial spawn parameters for each agent (or group of agents). Este
makes it possible to write a script which generates a JSON file for each simulation, including the
Edinburgh Forum topography, as well as a JSON object for each agent to be simulated. We ran
each simulation in Vadere using the new simulation input files, and then imported each resulting file
of crowd trajectories into MATLAB to be processed.
In Test 1 we used only the SFM movement model; in Test 2, we divided the simulations between
the SFM and the GNM, in order to test whether different movement models have unique move-
ment signatures.
As discussed in Webster and Amos (2020), we added small amounts of noise to the simulated
trajectories in order to replicate noise in the real crowd data. Typically, in crowd videos, shoulder
swaying can account for perceived side-to-side movement of pedestrians; sin embargo, the individuals
Mesa 1. Vadere simulation model parameters for SFM and GNM.
Parameter
ODE Solver
Pedestrian body potential
Pedestrian recognition distance
Obstacle body potential
Obstacle repulsion strength
Pedestrian radius (metro)
Pedestrian speed distribution mean (m/s)
Pedestrian minimum speed (m/s)
Pedestrian maximum speed (m/s)
Pedestrian acceleration (m/s)
Pedestrian search radius (metro)
SFM value
GNM value
Dormand-Prince
Dormand-Prince
2.72
0.3
20.1
0.25
0.2
1.4
0.4
3.2
2
1
2.72
0.8
20.1
0.25
0.2
1.4
0.4
3.2
2
1
Nota. SFM: social force model; GNM: gradient navigation model. metro: meter. m/s: meters per second.
Artificial Life Volume 28, Número 4
409
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
were detected by an overhead camera running at 9 fps (placed too high to detect shoulder sway).
Sin embargo, occasionally faulty detection caused very short-term errors in the extracted trajectories.
Once rendered, this caused individuals to appear to rapidly flick between two headings. As we had
no reliable way to quantify the (by inspection, pequeño) amount of noise in the trajectories, we adjusted
this by eye until the apparent noise in the simulated data matched the noise level observed in the
real data. At any time step, a simulated agent has a 15% chance of temporarily flicking their heading
by a randomly selected value up to 45 degrees (without changing their trajectory). The inclusion
of noise in simulations has been shown to replicate real behaviour in animal models (Bode et al.,
2010) whilst “preserving emergent behaviours of previous models” (pag. 292). En este caso, the noise
added to simulated trajectories only served to replicate faulty detection artefacts in the data, sin
altering the overall trajectories of the agents.
4.3 Simulation Validation
It is important to ensure that simulations (regardless of the movement model) produce outputs
that are valid, so we first calculated several statistical properties for a set of simulations and the
Edinburgh observations on which they were based.
As in Webster and Amos (2020), we used two metrics: polarization and nearest neighbour distance
(NND; Herbert-Read et al., 2015). The first metric is particularly useful for describing the existence
of large groups who might be moving together along the same heading (p.ej., leaving a lecture room
and moving together towards an exit), while the second metric is used for estimating overall crowd
density. Although these metrics have tended to be used in swarming models (p.ej., of birds or fish)
in which agents are supplied with local information about other agents in their vicinity, ellos tienen
recently also been used effectively to assess a model of collective behaviour based purely on vision,
which is perhaps better aligned to our current model (Bastien & Romanczuk, 2020).
Polarisation measures the level of order in a crowd, in terms of the heading alignment of mem-
beres. Polarisation is zero when the crowd is completely disordered (everyone is pointing in a dif-
ferent direction), and has a maximum value of 1 when all members of the crowd have the same
heading:
ϕ = 1
norte
(cid:2)
(cid:2)
(cid:2)
exp.(ιθi)
(cid:2)
(cid:2) ,
(cid:2)
(cid:2)
(cid:2)
(cid:2)
(cid:2)
norte(cid:3)
yo=1
(1)
where N is the number of individuals in the frame, ι is the imaginary unit, and θi is the heading of
each individual.
NND measures the level of clustering in a crowd. The average NND for a single frame (derived
from either the real data set or the simulation) is calculated from the sum of nearest neighbour
distances of all N individuals:
ν = 1
norte
norte(cid:3)
yo=1
di,
(2)
where di is the NND between point i and the closest individual in the frame, as calculated by the
standard distance formula,
(cid:4)
di =
(x2 − x1)2 + (y2 − y1)2.
(3)
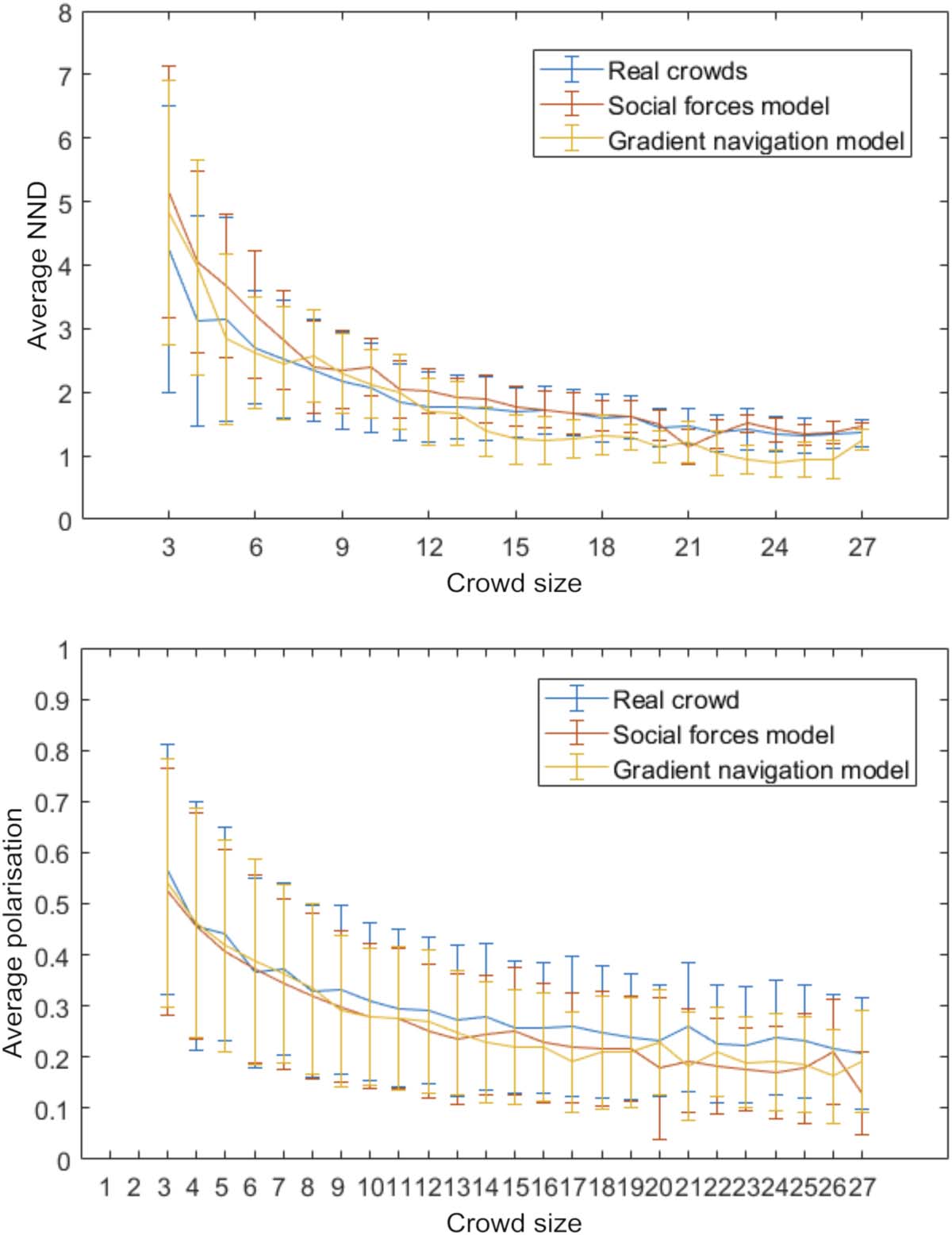
We selected 20 random Edinburgh clips with varying crowd sizes, and then simulated each scenario
20 times with each movement model. Results are presented in Figure 5; these confirm that both
movement models produce high-level outputs that are comparable to the real-world scenarios, y
that there are no significant differences between the outputs of each movement model.
410
Artificial Life Volume 28, Número 4
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
Cifra 5. Movement models/real crowd statistical comparisons: Nearest neighbour distance (NND) (arriba) and polari-
estación (abajo) as a function of crowd size. The outputs of both movement models have properties that are close to
those of the real crowds.
4.4 Classification Tests
For both tests, we constructed a web-based application1 that presented users with an information
pantalla, asked them to click to confirm their consent to participate, and then presented participants
with a randomised sequence of movies. For each movie, participants were asked to click either a
“Real” or “Simulated” button, according to their own perception and opinion. At the end of the
secuencia, users were asked in a free text box to supply short notes on any features that they thought
allowed them to identify the real crowd, to specify their level of expertise in crowd science (“High,"
“Medium,” or “Low”), and to supply their email address (this was used as a participant ID to
allow for tracking across the two tests). Once the user submitted their information, their responses
1 Available at http://www.martynamos.org/TTFC2/.
Artificial Life Volume 28, Número 4
411
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Mesa 2. The total number of individuals observed and the mean entry time interval of each clip from Test 1.
Clip
Number of individuals
Mean entry time interval (s)
Standard deviation (s)
1
2
3
4
5
6
194
149
112
104
150
125
0.34
0.46
0.67
0.62
0.48
0.55
0.22
0.26
0.38
0.34
0.24
0.33
were stored on the server, and they were told how many real crowds they had correctly identified
(this may have inadvertently helped with recruitment, as some particularly high-scoring participants
shared screenshots of their success on social media).
4.4.1 Prueba 1
Prueba 1 was the baseline test to give each participant an initial score of their ability to classify movies
as either real or simulated. We showed participants a sequence of 12 cine, 6 of which were based
on real trajectories, y 6 of which were generated using the SFM-based simulation of that scenario.
Each movie was 30 s in duration (en todos los casos, participants were free to choose early, before the end
of the movie, and move on to the next one).
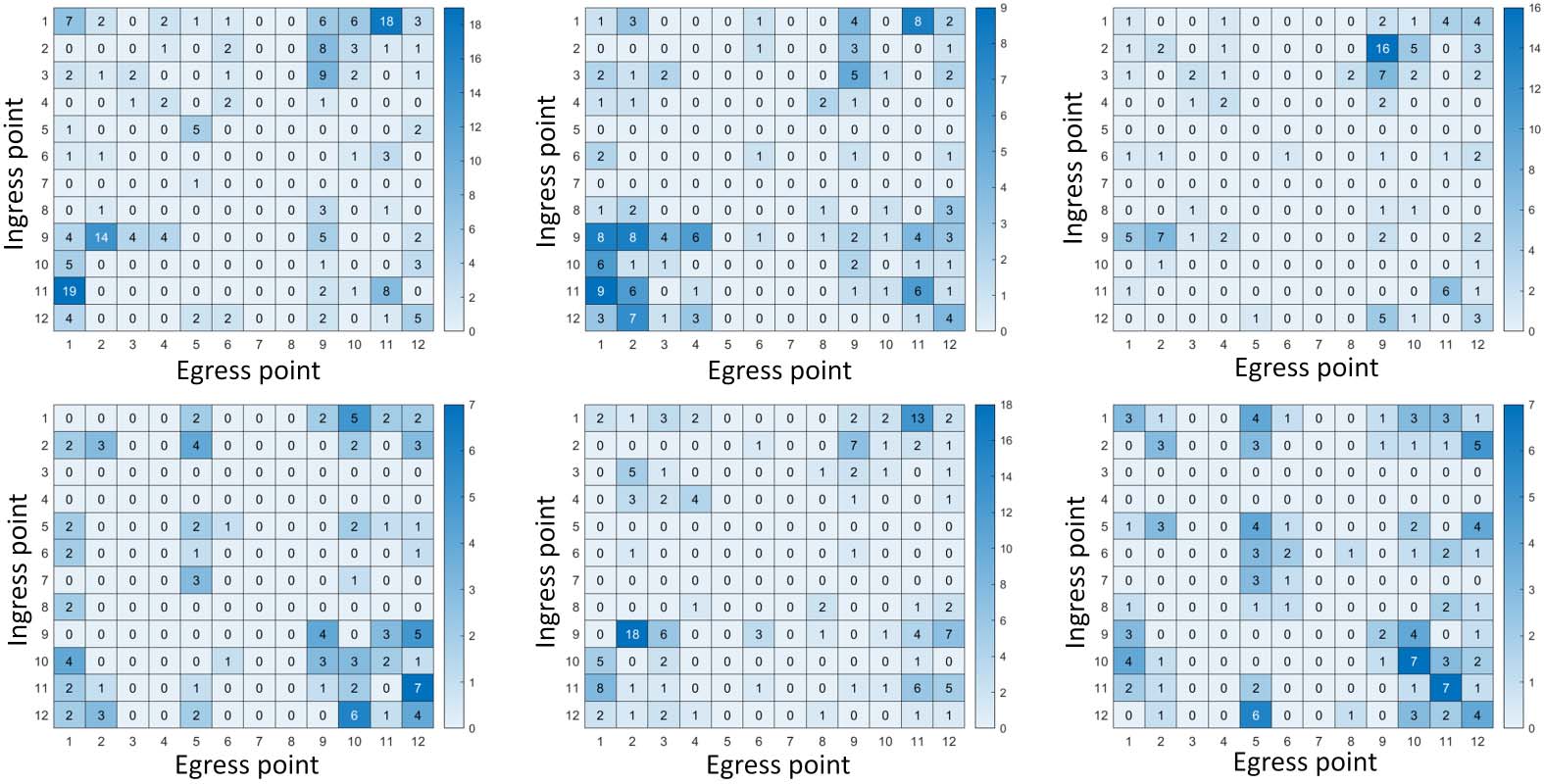
For each real clip, the total number of individuals observed and average entry time interval is
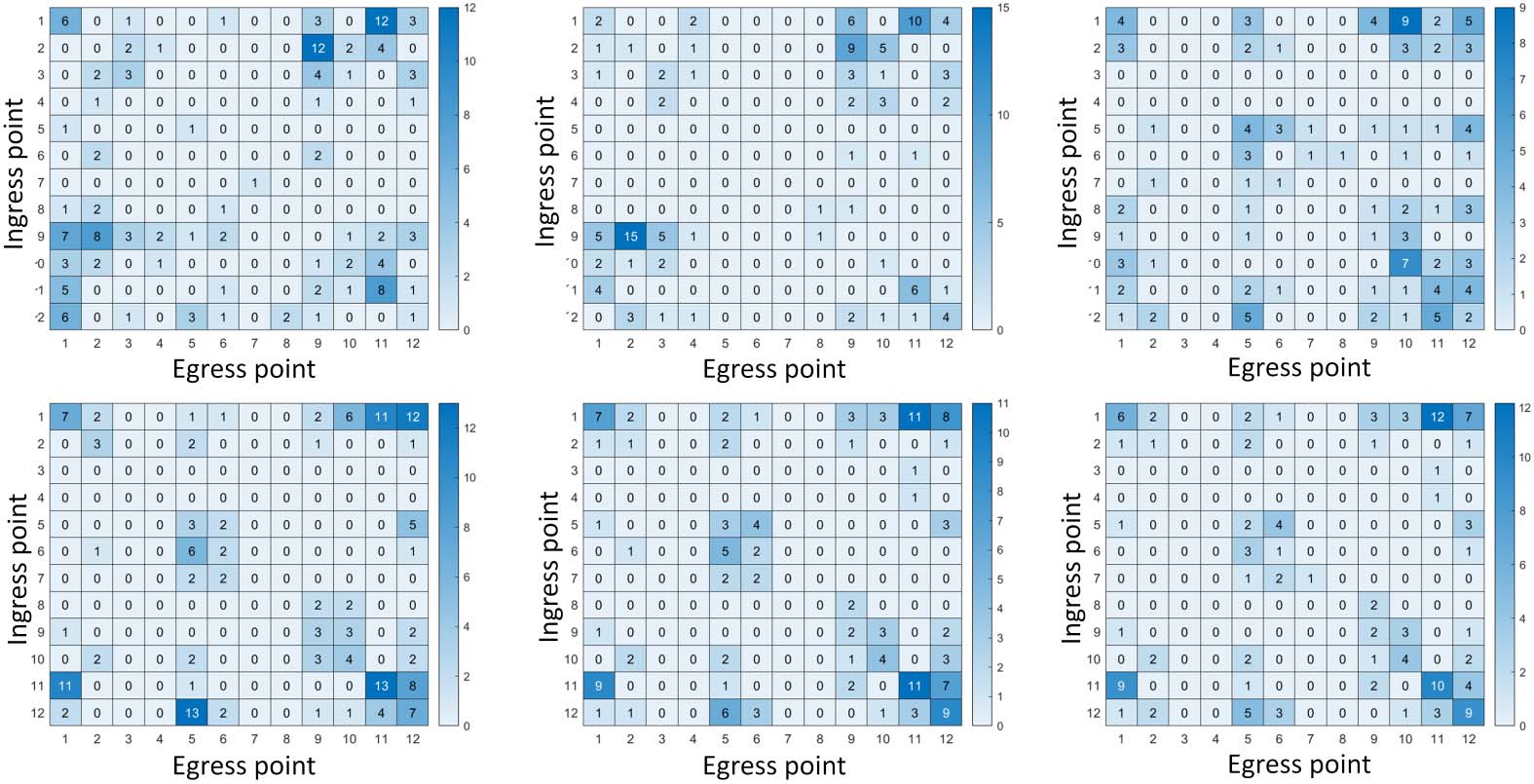
mostrado en la tabla 2 (the simulations were set up to reflect these). We present heatmap visualisations
of the route choice distribution for each clip in Figure 6. The Forum has 11 ingress points, y el
12th row and column represent individuals who start or end their observed trajectories inside the
forum space.
Cifra 6. Heatmap representations of entry/exit point distributions for clips 1–3 (arriba) and 4–6 (abajo) from Test 1.
412
Artificial Life Volume 28, Número 4
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Mesa 3. The total number of individuals observed and the mean entry time interval of each clip from Test 2.
Clip
Number of individuals
Mean entry time interval (s)
Standard deviation (s)
1
2
3
4
5
6
149
122
132
162
144
133
0.49
0.54
0.47
0.38
0.39
0.47
0.27
0.28
0.26
0.24
0.26
0.47
4.4.2 Prueba 2
In Test 2, we first required participants to undertake a training phase, in which they were shown
6 representative clips generated from Edinburgh observations. Participants were made explicitly
aware that they were watching real crowds. They were then shown 18 movies in total: 6 Residencia en
observaciones, 6 derived from SFM-based simulations, y 6 from GNM-based simulations.
For each real clip, the total number of individuals observed and average entry time interval is
mostrado en la tabla 3 (de nuevo, the simulations were set up to reflect these). We present heatmap visuali-
sations of the route choice distribution for each clip in Figure 7.
5 Resultados
In this section we present our trial results. In what follows, we adopt the following notation for
participant groups: P1 is the initial set of 232 participants who took Test 1 (to establish their baseline
puntuaciones, with no training) and P2 is the subset of 50 participants in P1 who went on to take Test 2
(the new test that included a training phase to establish whether or not performance improves after
viewing real crowd videos).
Cifra 7. Heatmap representations of entry/exit point distributions for clips 1–3 (arriba) and 4–6 (abajo) from Test 2.
Artificial Life Volume 28, Número 4
413
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Mesa 4. Prueba 1 average scores for P1 − P2 and P2.
Set
P1 − P2
P2
Prueba 1
31.21%
27%
Dakota del Sur
20.19%
19.31%
Nota. Scores are presented as “% correctly classified,” as the number of
movies differed between tests. Analysis confirms that P2 is representative.
Mesa 5. Prueba 1 and Test 2 average scores for P2 only.
Prueba 1
27%
Dakota del Sur
19.31%
Prueba 2
60.22%
Dakota del Sur
26.35%
5.1 Classification Accuracy
We first consider whether or not group P2 is representative of the larger set of participants. In both
Prueba 1 and Test 2, participants were scored according to their ability to correctly classify movies,
and received 1 point for every correct classification. We calculate the average Test 1 scores for both
P1 − P2 (eso es, participants who only took Test 1) and P2 (participants who took both tests), y
present them in Table 4 (scores are presented as % due to the fact that the number of movies
differed between tests).
A Lilliefors test confirms that neither data set is normally distributed, so we use a two-sided
Wilcoxon rank sum test to confirm that data in P1 − P2 and P2 are samples from continuous distri-
butions with equal medians (pag = 0.0724). We conclude, por lo tanto, that P2 is a representative group.
We then calculate the average Test 1 and Test 2 classification scores for P2 only; these are shown in
Mesa 5. This reveals a significant improvement in the overall correct classification score after training
(de 27% a 60%). In Trial 2, participants correctly identified SFM-derived movies 63% del
tiempo, and GNM-derived movies 59% of the time, so we cannot say that there exists a significant
difference between the two models in terms of the overall characteristics of their outputs.
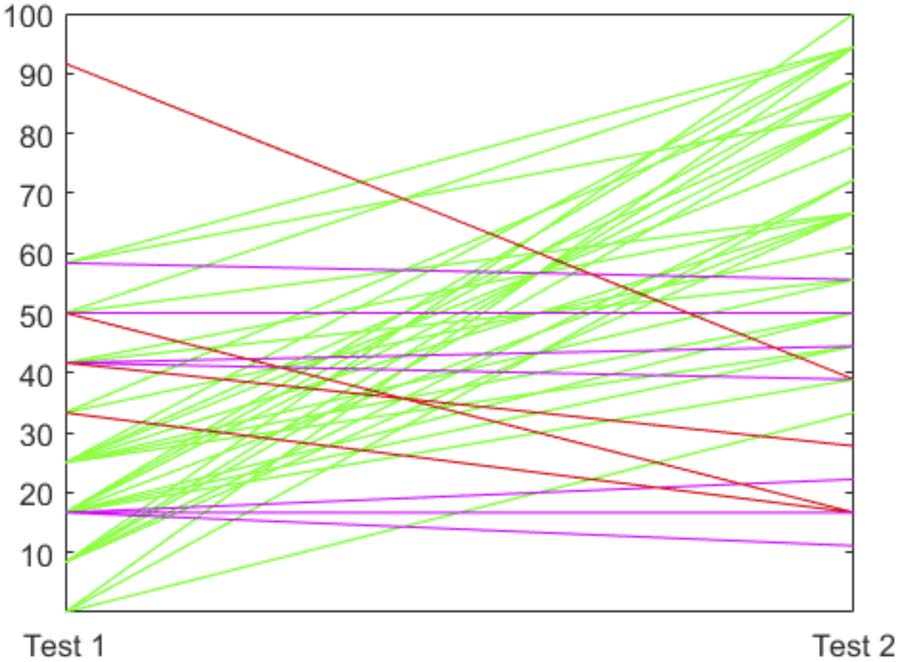
En figura 8 we depict the individual changes in performance for the 50 members of P2; visual
inspection alone confirms that the vast majority of participants showed a marked improvement in
classification performance after training. The average absolute change between Test 1 and Test 2
Cifra 8. Slopegraph plot of changes in individual classification performance between Test 1 and Test 2 (50 individuals
shown in total). Green lines show significant improvements, purple lines show small changes, and red lines show
significant reductions in performance.
414
Artificial Life Volume 28, Número 4
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
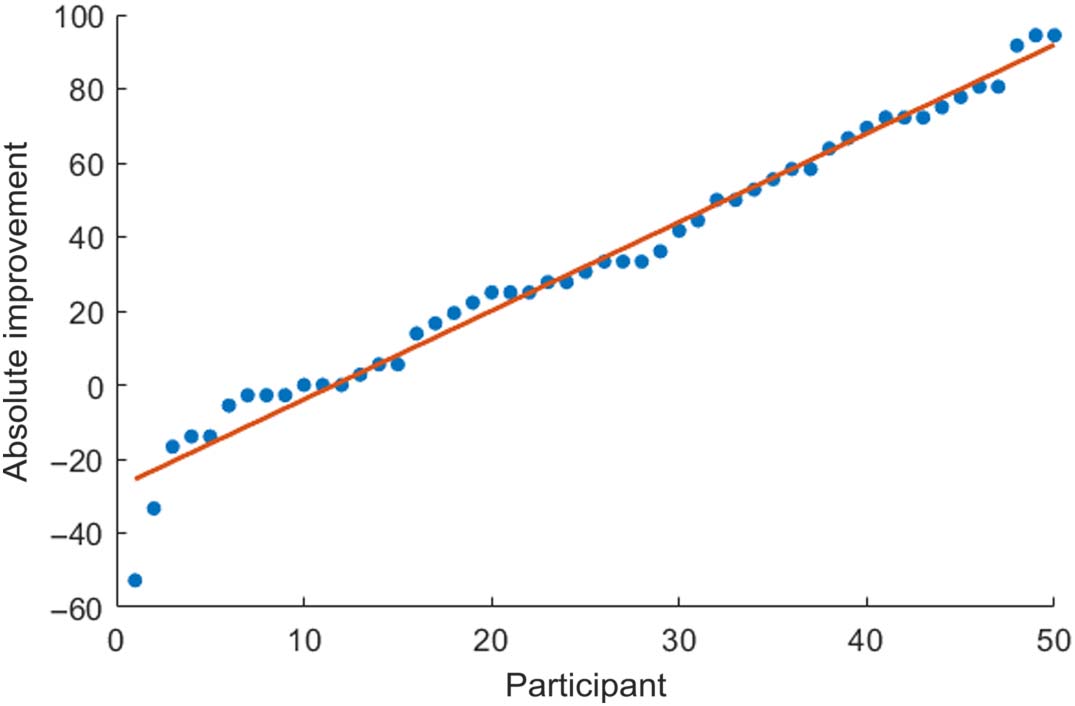
Cifra 9. Trendline of absolute performance changes between Test 1 and Test 2 for P2 participants.
era 33.22%. If the participants had guessed at random in each test we would expect an average
absolute change of 0%. A two-sided Wilcoxon signed-rank test rejects the null hypothesis of a zero
median in the distribution of average absolute change in our participant’s test scores (pag < 0.001). In
Figure 9 we show the direction of improvement, confirming the bias towards an increase.
These results confirm the first part of our hypothesis, that suitably trained individuals improve
their classification performance after viewing movies of real crowds.
5.2 Narrative Findings
We now move on to consider the free text supplied by members of P2 and extract common themes
that enable us to identify specific features of real and simulated crowds. We performed an initial
version of this analysis in Webster and Amos (2020), but extracted only a small number of general
themes and did not correlate them with classification performance (as we do here). Our informal
hypothesis is that participants who demonstrate significantly improved performance will correctly
identify (in their free text responses) the characteristic features of both real and simulated crowds.
All 50 participants supplied feedback, so this provides useful additional context to explain the
general uplift in performance. Given the relatively small amount of text, we performed manual the-
matic analysis to extract the predominant features highlighted in the supplied corpus. Each line of
free text was broken down into thematic atoms, which were then semantically mapped onto over-
arching themes. These are summarised in Table 6, partitioned into those features ascribed to real
crowds, and those to simulated crowds. We also give the relative frequency of each feature/theme
(a link to the full data set is supplied at the end of the article). We label each feature for ease of
presentation/discussion.
We immediately notice two dominant features: R2 (real crowds exhibit chaotic or unpredictable
movement, sometimes with rapid changes in speed/direction) accounted for 21% of thematic
atoms, and S4 (simulated crowds show smooth/continuous movement) accounted for nearly 16%
of all atoms. These observations are clearly complementary, in that (after training) observers believe
that real crowds are more unpredictable than simulated crowds, which move more smoothly. The
real data set does include many examples of unpredictable/rapid changes in movement, where (we
assume, not having access to the full video data sets) an individual is dashing across the space and
adjusting their movements to avoid others, or where they double-back on themselves.
However, it is not sufficient to simply analyse the frequency of themes, since dominant features
may not necessarily correlate with good classification performance in the participants who identify
them. We also need to extract the features that have been identified by the participants who perform
Artificial Life Volume 28, Number 4
415
l
D
o
w
n
o
a
d
e
d
f
r
o
m
h
t
t
p
:
/
/
d
i
r
e
c
t
.
m
i
t
.
e
d
u
a
r
t
l
/
/
l
a
r
t
i
c
e
-
p
d
f
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
l
/
_
a
_
0
0
3
8
1
p
d
.
f
b
y
g
u
e
s
t
t
o
n
0
7
S
e
p
e
m
b
e
r
2
0
2
3
M. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Table 6. Themes identified in narrative comments (labels given in brackets) and their observed frequencies.
Real crowds
Heterogenous/diverse paths/speeds (R1)
Chaotic/unpredictable/erratic movement - rapid changes (R2)
Decisiveness/purposefulness - direct movement (R3)
Stop-start movement (R4)
Static individuals/groups (R5)
Groups/flocking/close proximity/collisions (R6)
Collision avoidance (R7)
Simulated crowds
Homogeneous behaviour (S1)
Rapid direction/speed changes (S2)
Goal-driven (S3)
Smooth/continuous movement (S4)
Clusters (S5)
Long interactions/collisions and close proximity (S6)
Collision avoidance (S7)
Frequency %
9.21
21.05
6.56
7.89
2.63
7.89
5.26
Frequency %
5.26
3.95
3.95
15.79
1.32
6.58
2.63
Note. Related themes across real and simulated are numbered similarly, although there may not always be an exact
correlation.
best (or who show the best relative improvement) in the classification task. We first consider relative
changes in scores, and then look at the absolute changes, as each perspective yields insights.
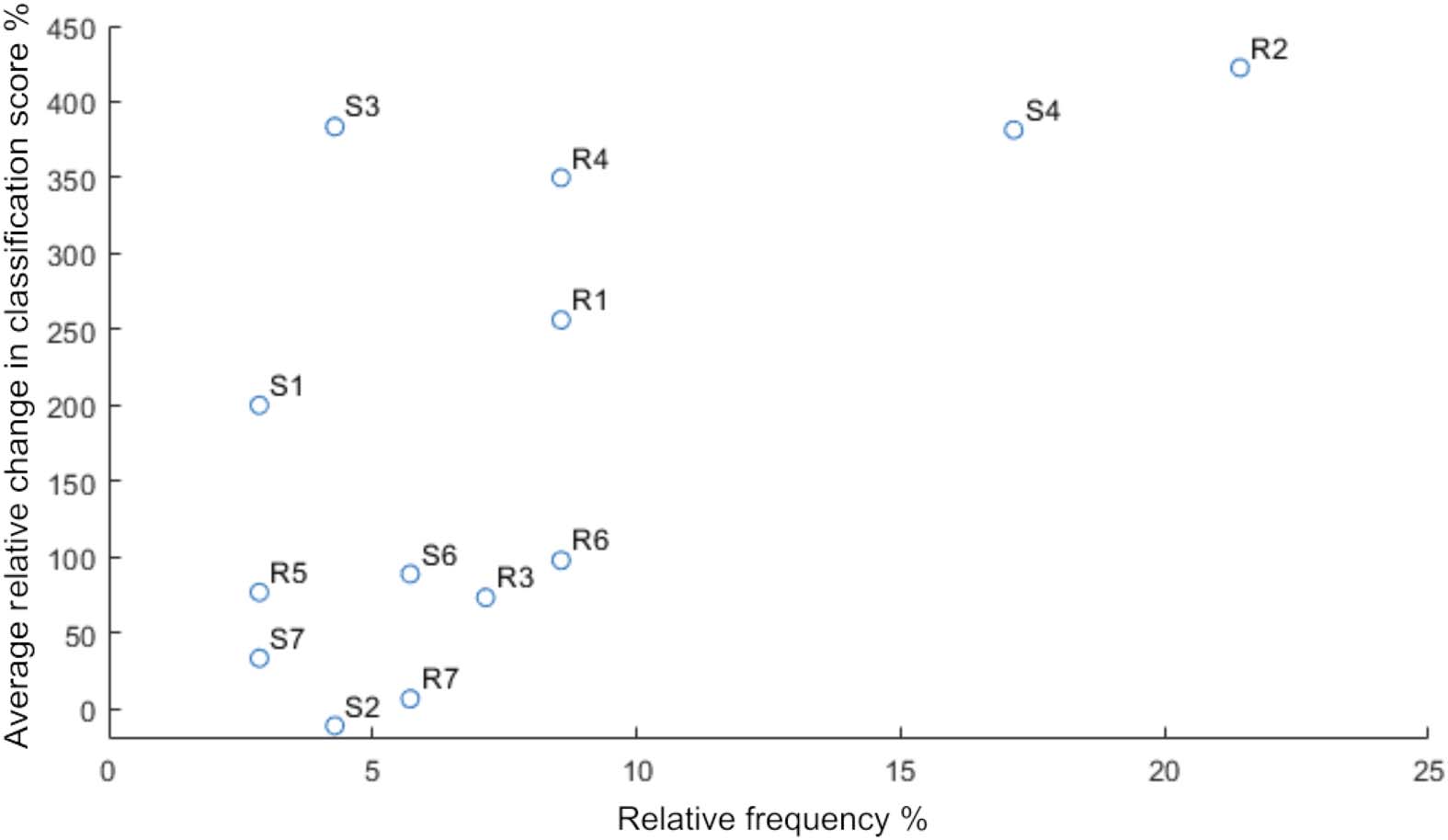
In Figure 10 we plot each theme against both the frequency of mentions and the average relative
change in classification performance of participants who specifically mention that theme. All scores
are expressed in terms of the percentage of movies that were correctly classified, not the raw score
(as previously stated, the number of movies differs between tests). For each participant, only where
score1 > 0, the relative change in score is calculated by ((score2 – score1)/score1 * 100). Por ejemplo, a
participant who scored 3/12 (25%) in Test 1 y 15/18 (83%) in Test 2 would have their relative
change calculated as ((83 – 25)/25) * 100) = 232%.
When calculating the average relative change, we discarded 4 participants with a Test 1 puntaje
of zero, as the notion of relative change is not defined for a zero reference value. (Sin embargo, estos
participants are still included in the discussion of actual score differences, below.)
We notice, from inspection, a cluster of themes that are relatively infrequently mentioned
(<10%), but which are associated with significant improvements in classification performance.
However, we see that the two themes that are mentioned with frequency >15%—S4 (smooth/
continuous movement in simulated crowds) y R2 (unpredictable movement in real crowds)—are
both also associated with performance improvements of around 400%. As noted earlier, estos
themes are complementary.
416
Artificial Life Volume 28, Número 4
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Cifra 10. Thematic frequency versus average relative change in classification performance. The upper-right quadrant
shows two themes (S4 and R2) that both appear frequently and that are correlated with significant positive relative
change in classification performance in those participants who mention those themes.
This finding is entirely consistent with our earlier informal narrative results (Webster & Amos,
2020), where participants who had flipped the real and simulated crowds believed that erratic move-
ment was characteristic of fake (simulado) crowds, and that real crowds moved smoothly and
predictably. After training on real crowds, sin embargo, the participants in this second trial correctly
identified that real crowds are actually more noisy and unpredictable, and that overwhelmingly
liso, predictable trajectories are a characteristic of simulations.
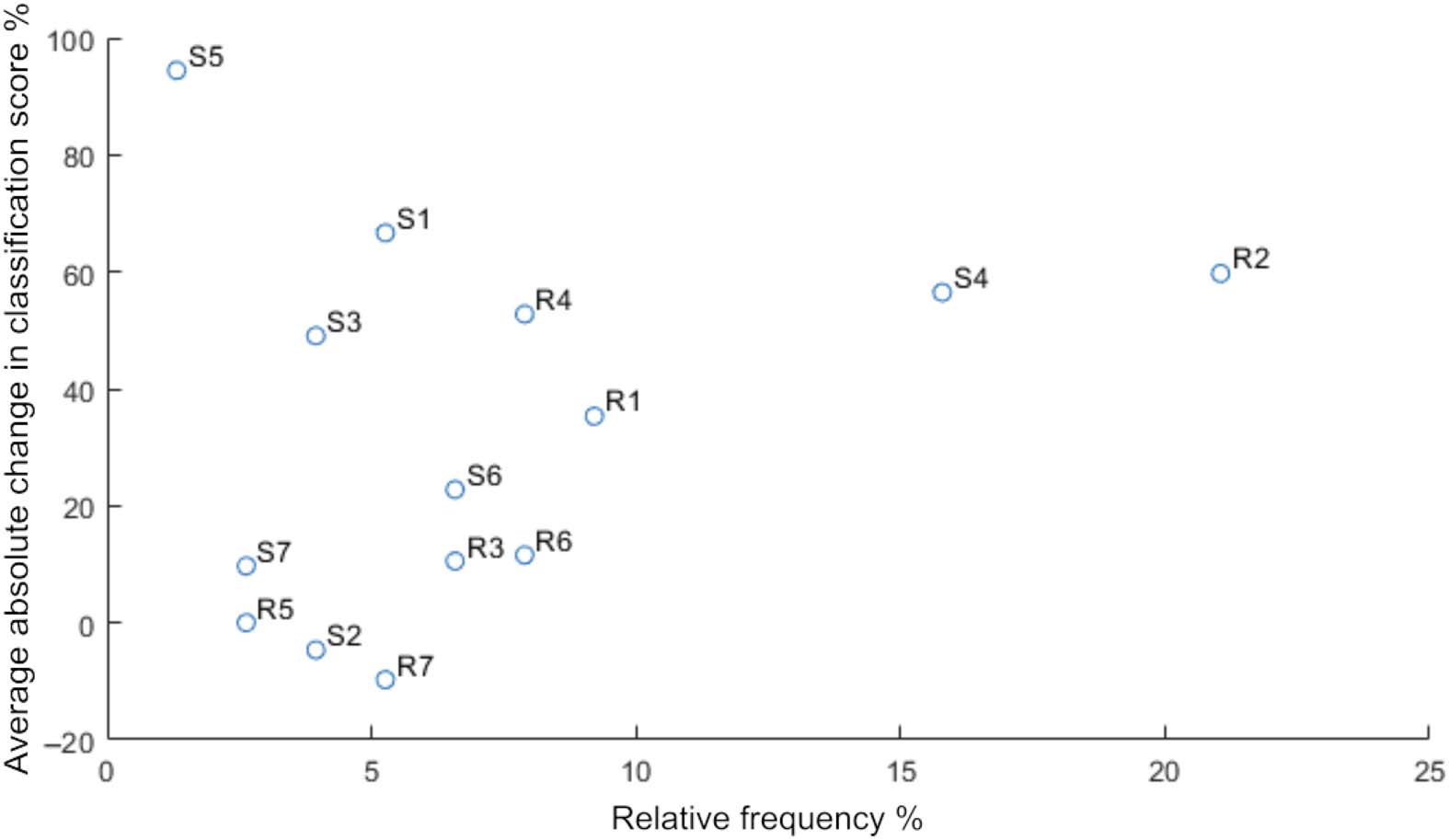
We now consider absolute changes in classification score between tests (Cifra 11). We see
roughly the same clustering of labels as before. (S5—presence of clusters in simulated crowds—is
an outlier, in that it was mentioned only by a single person, albeit one who saw a significant im-
provement in their classification score.) Here we draw particular attention to the (albeit infrequently
mentioned) themes that are correlated with negative shifts in performance, eso es, the features that
are mentioned by participants whose classification performance got worse after training. The two
features to which this applies are S2 (rapid direction/speed changes in simulated crowds) and R7
(collision avoidance in real crowds).
De nuevo, these findings are entirely consistent with both the current results and our previous study.
If high-performing participants correctly spot that simulated crowds move smoothly, then it is en-
tirely to be expected that low-performing participants will (incorrectly) ascribe S2 to them. Collision
avoidance in real crowds (R7) is also specifically mentioned in our previous study; Participantes
who performed badly assumed that individuals in real crowds would naturally avoid one another.
As we observe in Webster and Amos (2020, pag. 10):
En realidad, the opposite is true, as the real data set contains multiple instances of
individuals coming into close proximity. Además, the social forces model explicitly tries
to keep individuals apart unless close proximity is unavoidable, so the behaviour (distancia
keeping) that participants attributed to real people was actually an in-built feature of the
simulation.
Sin embargo, we must approach these findings with a degree of caution, as it may be the case, para
ejemplo, that the high-performing individuals are simply better learners, or that some videos may
Artificial Life Volume 28, Número 4
417
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Cifra 11. Thematic frequency versus average absolute change in classification performance. S2 and R7 are low-
frequency themes that are nonetheless associated with reductions in classification performance.
be inherently easier (or more difficult) to classify. All we claim here is that there would appear to be a
correlation between high classification performance and a small set of identifiable features of crowds.
An investigation of the fundamental underlying process(es) is beyond the scope of the current article
but may be performed in future work.
Basado en estos hallazgos, we conclude that the primary feature of real crowds that allows trained
individuals to correctly distinguish them from simulated crowds is their higher degree of unpre-
dictability in terms of individual trajectories. A secondary feature is collision avoidance (specifically,
proximity). Based on this work, our main suggestion (if what we seek is realistic believability in
crowd simulations) is that models should include the facility to add a degree of unpredictability
to the movement of individual agents (surprisingly, this feature is not generally provided). Modelos
might also benefit from a relaxation of collision detection radii to allow for closer proximity of
agents. In this way, we might easily replicate the appearance of at least some of the micro-level
behaviours referenced by Lerner et al. (2007).
6 Discussion and Conclusions
In this article we report the results of a human trial to identify the signature characteristics of real
crowds that allow them to be distinguished from simulated crowds. We find that unpredictability in
terms of individual trajectories is by far the best discriminator, and proximity in collision detection
is also relevant. We note some limitations of our study: The underlying crowd data set is based on
a relatively small physical space that is quite regular in nature, but we point out that it is actually
much larger than the arenas used for artificial crowd experiments. Además, the observations have
a higher level of ecological validity, as the recorded pedestrians were not consciously aware of
being participants in an experiment. Our second test used a relatively small number of participants,
but we have established that they were representative of a larger set. Finalmente, our findings are only
applicable to routine crowds (eso es, where people are going about their everyday business), and not
to emergency or evacuation crowds, where behaviours will be very different.
Sin embargo, there is still significant value in updating simulation of such routine crowds to render
them more realistically, especially if important policy or design decisions are to be made based on
418
Artificial Life Volume 28, Número 4
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
how they are perceived. Teniendo esto en cuenta, there may be value in training decision-makers who use
such simulations as part of their process (in a manner similar to that performed in our Test 2), en
order to ensure that they can first detect the characteristic features of real crowds (Opuesto a
making decisions based on flawed assumptions of how crowds behave). Fundamentally, el valor
of additional realism in crowd simulations may only be realised if end-users are able to recognise it.
This study has provided empirical evidence to support the inclusion of relatively straightforward
modifications to any and all of the movement models underpinning both scientific and commercial
crowd simulation packages. En tono rimbombante, the addition of noise to individual trajectories and the
relaxation of collision detection radii are entirely generic updates, but ones that could significantly
improve the believability of crowd simulations across a range of applications.
Future work may include the automatic detection of features of real crowds from larger and more
complex data sets, consideration of the impact of changing movement model parameters, y el
integration of identified features into commercial crowd simulation packages in order to test their
impact on believability (thus “closing the circle”).
7 Data Availability
Code used was based on the original repository available at https://doi.org/10.6084/m9.figshare
.c.4859118.v1. The thematic analysis data set used in this article is available at http://www
.martynamos.org/TTFC2/ThematicAnalysis.xlsx.
Expresiones de gratitud
JW was supported by a PhD studentship from the Faculty of Engineering and Environment,
Northumbria University. We thank Gerta Köster and her research team for useful discussions,
and all of the trial participants for their contributions.
Referencias
Adrian, J., Bode, NORTE., Amos, METRO., Baratchi, METRO., Beermann, METRO., Boltes, METRO., Corbetta, A., Dezecache, GRAMO.,
Dezecache, GRAMO., Drury, J., Fu, Z., Geraerts, r., Gwynne, S., Hofinger, GRAMO., Hunt, A., Kanters, T., Kneidl, A.,
Konya, K., Köster, GRAMO., & Wijermans, norte. (2019). A glossary for research on human crowd dynamics.
Collective Dynamics, 4(A19), 1–13. https://doi.org/10.17815/CD.2019.19
Aschwanden, GRAMO. D. PAG. A., Haegler, S., Bosché, F., Van Gool, l., & Schmitt, GRAMO. (2011). Empiric design
evaluation in urban planning. Automation in Construction, 20(3), 299–310. https://doi.org/10.1016/j.autcon
.2010.10.007
Bastien, r., & Romanczuk, PAG. (2020). A model of collective behavior based purely on vision. Science Advances,
6(6), Article eaay0792. https://doi.org/10.1126/sciadv.aay0792, PubMed: 32076645
Bode, norte. W.. F., Franks, D. w., & Wood, A. j. (2010). Making noise: Emergent stochasticity in collective
movimiento. Journal of Theoretical Biology, 267(3), 292–299. https://doi.org/10.1016/j.jtbi.2010.08.034, PubMed:
20816990
Bode, norte. W.. F., Kemloh Wagoum, A. Ud., & Codling, mi. A. (2015). Information use by humans during
dynamic route choice in virtual crowd evacuations. Royal Society Open Science, 2(1), Article 140410.
https://doi.org/10.1098/rsos.140410, PubMed: 26064589
Bohannon, R. W.. (1997). Comfortable and maximum walking speed of adults aged 20–79 years: Reference
values and determinants. Age and Ageing, 26(1), 15–19. https://doi.org/10.1093/ageing/26.1.15, PubMed:
9143432
Brambilla, METRO., Ferrante, MI., Birattari, METRO., & Dorigo, METRO. (2013). Swarm robotics: A review from the swarm
engineering perspective. Swarm Intelligence, 7(1), 1–41. https://doi.org/10.1007/s11721-012-0075-2
Crociani, l., Lämmel, GRAMO., & Vizzari, GRAMO. (2016). Multi-scale simulation for crowd management: A case study in
an urban scenario. Posada. Osman, & C. Sierra (Editores.), AAMAS 2016: Proceedings of the international conference on
autonomous agents and multiagent systems (LNCS 10002, páginas. 147–162). Saltador. https://doi.org/10.1007/978
-3-319-46882-2_9
Artificial Life Volume 28, Número 4
419
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Cronin, l., Krasnogor, NORTE., davis, B., Alexander, C., Robertson, NORTE., Steinke, J., Schroeder, S., Khlobystov,
A., Cooper, GRAMO., jardinero, PAG., Siepmann, PAG., Whitaker, B. J., & Marsh, D. (2006). The imitation game: A
computational chemical approach to recognizing life. Naturaleza Biotecnología, 24(10), Article 1203. https://doi
.org/10.1038/nbt1006-1203
Duives, D., Daamen, w., & Hoogendoorn, S. (2013). State-of-the-art crowd motion simulation models.
Transportation Research Part C: Emerging Technologies, 37, 193–209. https://doi.org/10.1016/j.trc.2013.02.005
Dutra, T., marqués, r., Cavalcante-Neto, J., Vidal, C., & Pettré, j. (2017). Gradient-based steering for
vision-based crowd simulation algorithms. Computer Graphics Forum, 36(2), 337348.
Ennis, C., Peters, C., & O'Sullivan, C. (2011). Perceptual effects of scene context and viewpoint for virtual
pedestrian crowds. ACM Transactions on Applied Perception (TAP), 8(2), 1–22. https://doi.org/10.1145
/1870076.1870078
feng, T., Yu, L.-F., Yeung, S.-K., Yin, K., & zhou, k. (2016). Crowd-driven mid-scale layout design. ACM
Transactions on Graphics, 35(4), Article 132. https://doi.org/10.1145/2897824.2925894
Fernando, T., Denman, S., Sridharan, S., & Fookes, C. (2018). Tracking by prediction: A deep generative
model for multi-person localisation and tracking. En 2018 IEEE Winter conference on applications of computer
visión (WACV) (páginas. 1122–1132). IEEE. https://doi.org/10.1109/WACV.2018.00128
Fuchsberger, A., Tahmasbi, NORTE., & Ricks, B. (2017, August 10–12). A framework for achieving realism in agent-based
pedestrian crowd simulations [Paper presentation]. AMCIS 2017: America’s Conference on Information
Sistemas, Bostón, MAMÁ, United States.
Gloor, C. (2016). PedSim: Pedestrian crowd simulation. https://www.pedsim.net/pedsim/
Gorochowski, t. mi. (2016). Agent-based modelling in synthetic biology. Essays in Biochemistry, 60(4), 325–336.
https://doi.org/10.1042/EBC20160037, PubMed: 27903820
Harding, PAG., Gwynne, S., & Amos, METRO. (2011). Mutual information for the detection of crush. MÁS UNO,
6(12), Article e28747. https://doi.org/10.1371/journal.pone.0028747, PubMed: 22229055
Harel, D. (2005). A Turing-like test for biological modeling. Naturaleza Biotecnología, 23(4), 495–496. https://doi
.org/10.1038/nbt0405-495, PubMed: 15815679
Helbing, D., & Molnar, PAG. (1995). Social force model for pedestrian dynamics. Physical Review E, 51(5),
Article 4282–4286. https://doi.org/10.1103/physreve.51.4282, PubMed: 9963139
Herbert-Read, j. MI., Romenskyy, METRO., & Sumpter, D. j. t. (2015). A Turing test for collective motion. Biología
Letras, 11, Article 20150674. https://doi.org/10.1098/rsbl.2015.0674, PubMed: 26631244
Kimura, T., Sekine, h., Sano, T., Takeichi, NORTE., Yoshida, y., & Watanabe, h. (2003). Pedestrian simulation
system SimWalk. In Summaries of Technical papers of the annual meeting of the Architectural Institute of Japan, (E-1,
páginas. 915–916).
Klüpfel, h. (2007). The simulation of crowd dynamics at very large events—calibration, empirical data, y
validation. Posada. Waldau, PAG. Gattermann, h. Knoflacher, & METRO. Schreckenberg (Editores.), Pedestrian and
evacuation dynamics (PED) 2005 (páginas. 285–296). Saltador. https://doi.org/10.1007/978-3-540-47064-9_25
Korhonen, T., Hostikka, S., Heliövaara, S., & Ehtamo, h. (2010). FDS+Evac: An agent based fire evacuation
modelo. In W. Klingsch, C. Rogsch, A. Schadschneider, & METRO. Schreckenberg (Editores.), Pedestrian and evacuation
dinámica (PED) 2008 (páginas. 109–120). Saltador. https://doi.org/10.1007/978-3-642-04504-2_8
Lemercier, S., & Auberlet, J.-M. (2016). Towards more behaviors in crowd simulation. Computer Animation &
Virtual Worlds, 27(1), 24–34. https://doi.org/10.1002/cav.1629
Lerner, A., Chrysanthou, y., & Lischinski, D. (2007). Crowds by example. Computer Graphics Forum, 26(3),
655–664. https://doi.org/10.1111/j.1467-8659.2007.01089.x
Loscos, C., Marchal, D., & Meyer, A. (2003). Intuitive crowd behavior in dense urban environments using
local laws. In Proceedings theory and practice of computer graphics, TPCG 2003 (páginas. 122–129). IEEE.
https://doi.org/10.1109/TPCG.2003.1206939
Lovreglio, r., Dias, C., Song, X., & Ballerini, l. (2017). Towards microscopic calibration of pedestrian
simulation models using open trajectory datasets: The case study of the Edinburgh Informatics Forum.
In S. Hamdar (Ed.), International conference on traffic and granular flow TGF 2017 (páginas. 215–223). Saltador.
https://doi.org/10.1007/978-3-030-11440-4_25
luo, l., zhou, S., Cai, w., Yoke, METRO., Bajo, h., tian, F., Wang, y., xiao, X., & Chen, D. (2008). Agent-based
human behavior modeling for crowd simulation. Computer Animation & Virtual Worlds, 19(3–4), 271–281.
https://doi.org/10.1002/cav.238
420
Artificial Life Volume 28, Número 4
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Mahmood, I., Haris, METRO., & Sarjoughian, h. (2017). Analyzing emergency evacuation strategies for mass
gatherings using crowd simulation and analysis framework: Hajj scenario. In SIGSIM-PADS ’17:
Actas de la 2017 ACM SIGSIM conference on principles of advanced discrete simulation (páginas. 231–240). ACM.
https://doi.org/10.1145/3064911.3064924
Majecka, B. (2009). Statistical models of pedestrian behaviour in the Forum [Unpublished master’s thesis]. Universidad
of Edinburgh.
Mckenzie, F. D., Petty, METRO. D., Kruszewski, PAG. A., Gaskins, R. C., Nguyen, Q.-A. h., Seevinck, J., & Weisel,
mi. W.. (2008). Integrating crowd-behavior modeling into military simulation using game technology.
Simulation & Gaming, 39(1), 10–38. https://doi.org/10.1177/1046878107308092
Moussaïd, METRO., Kapadia, METRO., Thrash, T., Sumner, R. w., Bruto, METRO., Helbing, D., & Hölscher, C. (2016). Crowd
behaviour during high-stress evacuations in an immersive virtual environment. Journal of the Royal Society
Interface, 13(122), Article 20160414. https://doi.org/10.1098/rsif.2016.0414, PubMed: 27605166
Pelechano, NORTE., Allbeck, j. METRO., & Badler, norte. I. (2007). Controlling individual agents in high density crowd
simulation. In SCA ’07: Actas de la 2007 ACM SIGGRAPH / Eurographics symposium on computer
animation (páginas. 99–108). ACM.
Peters, C., & Ennis, C. (2009). Modeling groups of plausible virtual pedestrians. IEEE Computer Graphics and
Aplicaciones, 29(4), 54–63. https://doi.org/10.1109/MCG.2009.69, PubMed: 19798863
Pettré, J., Ondˇrej, J., Olivier, A.-H., Cretual, A., & Donikian, S. (2009). Experiment-based modeling,
simulation and validation of interactions between virtual walkers. In SCA ’09: Actas de la 2009 ACM
SIGGRAPH / Eurographics symposium on computer animation (páginas. 189–198). ACM. https://doi.org/10.1145
/1599470.1599495
Pouw, C., Toschi, F., van Schadewijk, F., & Corbetta, A. (2020). Monitoring physical distancing for crowd
management: Real-time trajectory and group analysis. MÁS UNO, 15(10), Article e0240963. https://doi
.org/10.1371/journal.pone.0240963
Pretorius, METRO., Gwynne, S., & Galea, mi. R. (2015). Large crowd modelling: An analysis of the Duisburg Love
Parade disaster. Fire and Materials, 39(4), 301–322. https://doi.org/10.1002/fam.2214
Reynolds, C. W.. (1987). Flocks, herds and schools: A distributed behavioral model. ACM SIGGRAPH
Computer Graphics, 21(4), 25–34. https://doi.org/10.1145/37402.37406
Ricks, B. (2013). Improving crowd simulation with optimal acceleration angles, movement on 3D surfaces, and social dynamics
[Unpublished doctoral dissertation]. Brigham Young University.
Rivers, MI., Jaynes, C., Kimball, A., & Morrow, mi. (2014). Using case study data to validate 3D agent-based
pedestrian simulation tool for building egress modeling. Transportation Research Procedia, 2, 123–131.
https://doi.org/10.1016/j.trpro.2014.09.016
Seer, S., Rudloff, C., Matyus, T., & Brändle, norte. (2014). Validating social force based models with
comprehensive real world motion data. Transportation Research Procedia, 2, 724–732. https://doi.org/10.1016
/j.trpro.2014.09.080
Seitz, METRO. J., Templeton, A., Drury, J., Köster, GRAMO., & Philippides, A. (2017). Parsimony versus reductionism:
How can crowd psychology be introduced into computer simulation? Review of General Psychology, 21(1),
95–102. https://doi.org/10.1037/gpr0000092
singh, h., Arter, r., Dodd, l., Langston, PAG., Lester, MI., & Drury, j. (2009). Modelling subgroup behaviour in
crowd dynamics DEM simulation. Applied Mathematical Modelling, 33(12), 4408–4423. https://doi.org/10
.1016/j.apm.2009.03.020
Herrero, A., James, C., jones, r., Langston, PAG., Lester, MI., & Drury, j. (2009). Modelling contra-flow in crowd
dynamics DEM simulation. Safety Science, 47(3), 395–404. https://doi.org/10.1016/j.ssci.2008.05.006
Templeton, A., Drury, J., & Philippides, A. (2015). From mindless masses to small groups: Conceptualizing
collective behavior in crowd modeling. Review of General Psychology, 19(3), 215–229. https://doi.org/10.1037
/gpr0000032
Thalmann, S., & Musse, S. R. (2013). Crowd simulation. Saltador.
Turing, A. METRO. (1950). Computing machinery and intelligence. Mente, 59(236), 433–460. https://doi.org/10
.1093/mind/LIX.236.433
Wagner, NORTE., & Agrawal, V. (2014). An agent-based simulation system for concert venue crowd evacuation
modeling in the presence of a fire disaster. Expert Systems with Applications, 41(6), 2807–2815. https://doi
.org/10.1016/j.eswa.2013.10.013
Artificial Life Volume 28, Número 4
421
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
METRO. Amos and J. Webster
Identification of Characteristics of Collective Human Motion
Wang, h., & O'Sullivan, C. C. (2016). Globally continuous and non-Markovian crowd activity analysis from
videos. In B. cuerpo, j. Matas, norte. Sebe, & METRO. Welling (Editores.), ECCV 2016: European conference on computer
visión (LNCS 9909, páginas. 527–544). Saltador. https://doi.org/10.1007/978-3-319-46454-1_32
Wang, W.. l., Lo, S. METRO., & Liu, S. B. (2017). A cognitive pedestrian behavior model for exploratory
navigation: Visibility graph based heuristics approach. Simulation Modelling Practice and Theory, 77, 350–366.
https://doi.org/10.1016/j.simpat.2017.07.002
Webster, J., & Amos, METRO. (2020). A Turing test for crowds. Royal Society Open Science, 7(7), Article 200307.
https://doi.org/10.1098/rsos.200307, PubMed: 32874628
Wei, X., Lu, w., Zhu, l., & Xing, W.. (2018). Learning motion rules from real data: Neural network for
crowd simulation. Neurocomputing, 310, 125–134. https://doi.org/10.1016/j.neucom.2018.05.022
Yao, Z., zhang, GRAMO., Lu, D., & Liu, h. (2020). Learning crowd behavior from real data: A residual network
method for crowd simulation. Neurocomputing, 404, 173–185. https://doi.org/10.1016/j.neucom.2020
.04.141
zhang, D., Zhu, h., Hostikka, S., & Qiu, S. (2019). Pedestrian dynamics in a heterogeneous bidirectional
flow: Overtaking behaviour and lane formation. Physica A: Statistical Mechanics and Its Applications, 525,
72–84. https://doi.org/10.1016/j.physa.2019.03.032
Zönnchen, B., Kleinmeier, B., & Köster, GRAMO. (2020). Vadere—A simulation framework to compare
locomotion models. In I. Zuriguel, A. Garcimartin, & R. Cruz (Editores.), Traffic and granular flow 2019
(páginas. 331–337). Saltador. https://doi.org/10.1007/978-3-030-55973-1_41
yo
D
oh
w
norte
oh
a
d
mi
d
F
r
oh
metro
h
t
t
pag
:
/
/
d
i
r
mi
C
t
.
metro
i
t
.
mi
d
tu
a
r
t
yo
/
/
yo
a
r
t
i
C
mi
–
pag
d
F
/
/
/
/
2
8
4
4
0
1
2
0
4
3
2
9
2
a
r
t
yo
/
_
a
_
0
0
3
8
1
pag
d
.
F
b
y
gramo
tu
mi
s
t
t
oh
norte
0
7
S
mi
pag
mi
metro
b
mi
r
2
0
2
3
422
Artificial Life Volume 28, Número 4